Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
4-1-1996
DIRSIG digital imaging and remote sensing
imaging generation model: Infrared airborne
validation & input parameter analysis
Todd Kraska
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
.
Recommended Citation
DIRSIG
Digital Imaging and Remote
~ensing
Image Generation Model:
Infrared Airborne Validation
&
Input Parameter Analysis
Todd
A.
Kraska
Rochester Institute of Technology
Chester F. Carlson Center for Imaging Science
A thesis submitted in partial fulfillment of the
requirements for the degree of Master of Science
at the Chester F. Carlson Center for Imaging Science
in the College of Science
of the Rochester Institute of Technology
April 1996
Signature of the Author
_
Accepted by
Dana
G.
Marsh
CHESTER F. CARLSON
CENTER FOR IMAGING SCIENCE
COLLEGE OF SCIENCE
ROCHESTER INSTITUTE OF TECHNOLOGY
ROCHESTER, NEW YORK
CERTIFICATE OF APPROVAL
M.S.
DEGREE THESIS
The M.S. Degree Thesis of Todd
A.
Kraska
has been examined and approved by the
thesis committee as satisfactory for the
thesis requirement for the
Master of Science degree
Dr. John Schott, Thesis Advisor
Dr. Robert Fiete
THESIS RELEASE PERMISSION FORM
ROCHESTER INSTITUTE OF TECHNOLOGY
COLLEGE OF SCIENCE
CHESTER F CARLSON CENTER FOR IMAGING SCIENCE
DIRSIG
Digital Imaging and Remote
~ensing
Image Generation Model:
Infrared Airborne Validation
&
Input Parameter Analysis
I, Todd
A.
Kraska, hereby grant permission to the Wallace Memorial Library ofR.I.T. to
reproduce my thesis in whole or in part. Any reproduction will not be for commercial use
of
profit
Signature:
_
9C
,
-DIRSIG
Digital
Imaging
and
Remote
Sensing
Image Generation Model:
Infrared Airborne Validation
&
Input Parameter Analysis
by
Todd A. Kraska
Submitted
to the
Chester F. Carlson Center for
Imaging
Science
in
partialfulfillment
ofthe
requirementsfor
the
Master
ofScience Degree
at
the
Rochester
Institute
ofTechnology
Abstract
The
civilian andmilitary
needfor high
resolutioninfrared
imagery
has
dramatically
increased in
recent
times.
Regardless
ofthe
userorthe need,
infrared
imagery
canprovide uniqueinformation
that
is
not available
in
the
visible region ofthe
electromagnetic spectrum.Just
asthe
needfor
realinfrared
imagery
has
increased,
sohas
the
needfor
computergeneratedinfrared
imagery,
alsoknown
as syntheticimagery. Synthetic
imagery
is
createdby
mathematically modeling
the "real
world" andthe
imaging
chain,
encompassing everything from
the target to the
sensor characteristics.The
amount offaith
that
canbe
placedin
a syntheticimage depends
onits
accuracy in recreating
the
real world.The Digital
Imaging
and
Remote
Sensing
Image Generation Model
(DIRSIG)
atthe
Rochester Institute
ofTechnology (RIT)
attempts
to
modelthe
real world.It
creates syntheticimages
through the
integration
ofscenegeometry,
ray-tracer,
thermal,
radiometry,
and sensor submodels.The focus
ofthis
projectlies in evaluating
the
ability
ofDIRSIG
to
recreatethe
imaging
chain andproducehigh
resolution syntheticimagery.
DIRSIG
synthetic
imagery
ofthe
Kodak
Hawkeye
plant andthe
surrounding
area wascomparedto
aerialinfrared
imagery
ofthe
same regionusing
root mean square error and rank order correlation.This
comparisonhelped
to
validatethe
outputfrom DIRSIG
anddetect inadequacies
in
the
image
chain model.In
additionto
validating
DIRSIG,
a procedurefor optimizing
the
input
parameters,
incorporating
asensitivity
analysis,
wasdeveloped. This
reducesthe
time involved
in creating
arealistic andaccurate syntheticTable of Contents
Abstract
i
Table
of
Contents
ii
List
of
Figures & Tables
iv
1.0
Introduction
1
2.
0
Objectives
4
2.1 DIRSIG Validation
4
2.2 Input Parameter Analysis & Optimization
6
3. 0
Background
8
3
.1 The
Big
Equation
8
3.2
Alternative
SIG Models
11
3.3 DIRSIG Overview
17
3.3.1
Scene
Geometry
Submodel
17
3.3.2 Ray-Tracer Submodel
19
3.3.3 Thermal Submodel
23
3.3.4
Radiometry
Submodel
24
3.3.5 Sensor Response
and
Modulation Transfer Functions
28
3.3.6 Final Image Generation Review
29
4.0
Technical Approach & Procedure
30
4.1 Validation
of
DIRSIG
30
4.1.1 Radiometric Validation
33
4.1.1.1 Rank Order Correlation
33
4. 1.1.2 RMS Error
34
4. 1
.2Geometric Validation
35
4.2 Input Parameter
Analysis
& Optimization
37
5. 0
Experimental
41
5.1 Truth
Imagery
Collection
41
5.1.1 Aerial Image Collection
-Image1
41
5.1.2 Equipment
Specifications-
Image 1
43
5.1.3
Rooftop
Image Collection
Images 2-3
44
5.1.4 Equipment
Specifications-
Image
2-3
45
5.1.5 Image Collection
Summary
47
5.2
Scene
Development &
Synthetic
Image Generation
50
5.2. 1 Terrain Generation
51
5.2.2
Building
Generation
52
5.2.3 Miscellaneous
Object
Creation
56
5.2.4 Meteorological Data
-Weather&
Atmosphere
57
5.2.5
Sensor
Parameters
& Profile
57
5.2.6
Image
Creation
Summary
58
5.3 DIRSIG
Validation
Results
61
5.3.1 Validation
-Primary
Truth
Imagery
(Bendix line
scanner)
61
5.3.1.1 Material Radiometric
Accuracy
-RMS Error
67
5.3. 1.2
Material
Radiometric
Accuracy
5.3.1.3 Radiometric
Accuracy
-Complex Phenomena
73
5.3.1.4 Geometric
Accuracy
82
5.3.2 Validation
-Alternate Truth
Imagery (Inframetrics)
85
5.3.3 Validation
Summary
87
6. 0
Input Parameter
Sensitivity
Analysis
&
Optimization
88
6. 1
Input
Parameter
Sensitivity
Analysis
88
6.1.1 Weather & Atmospheric
Sensitivity
94
6. 1.2 Material Parameter
Sensitivity
102
6.1.3 Time
History
Material Parameter
Sensitivity
110
6.2
Input
Parameter Optimization
114
6.2. 1 Meteorological Parameter Optimization
119
6.2.2 Material Parameter Optimization
120
6.5 Input Parameter
Sensitivity
Analysis & Optimization
Summary
1 26
7. 0
Recommendation
&
Conclusions
127
7.1
DIRSIG
127
7.2
Sensitivity
Analysis & Input Parameter Optimization
129
7.3 Conclusion
130
8. 0
References
131
APPENDIXA
Validation
Analysis
APPENDIX B
DIRSIG Files
APPENDIX
C
AutoCad
Scene
Construction
APPENDIX D
Material Files
Generic
Optimum
Angular Effects
APPENDIX E
Actual Weather Data
10 November 1991
12
October
1995
APPENDIX F
Sensitivity
Analysis
Meteorological
Data
Material
Data
List
of
Figures &
Tables
Figure3.1
-Solar energy
photon paths
8
Figure 3.2
Self-emitted
energy
photonpaths
9
Figure3.3
-GTVISIT
overview
11
Figure 3.4
Tl
synthetic
scene generation13
Figure 3.5
DIRSIG
overview
17
Figure 3.6
Facet
materialparameters
18
Figure 3.7
DIRSIG
data
hierarchy
18
Figure3.8
-Object &
part
bounding
volumes19
Figure 3.9
Ray-tracer
model20
Figure 3.10
Solar
history
21
Figure 3.11
Target Interactions
21
Figure 3.12
Ray-tracer
flow diagram
22
Figure 4. 1
Area
ofinterest
32
Figure 4.2
Relative
minimum&
maximuminput
values37
Figure 5.1
-Piper
Aztec
aircraft
41
Figure 5.2
Line
scannerimage
acquisition42
Figure 5.3
Bendix
line
scanner
43
Figure 5.4
Filtered Bendix responsivity
44
Figure 5.5
Inframetrics
videocamera
45
Figure 5.6
-Filtered Inframetrics responsivity
46
Figure 5.7
-2-D city
template
50
Figure 5
.8
Contour map
51
Figure 5.9
-AutoCad
terrain
52
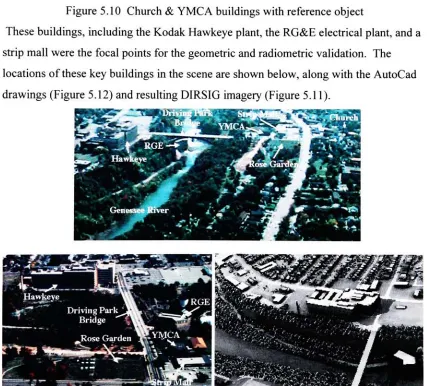
Figure 5.10
Church & YMCA
buildings
withreference object
53
Figure 5.11
Scene
layout
53
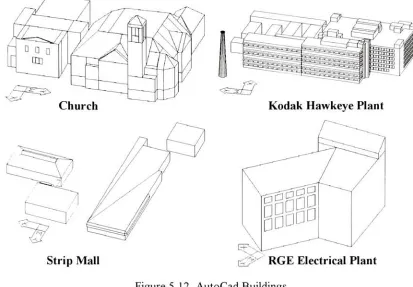
Figure 5.12
AutoCad Buildings
54
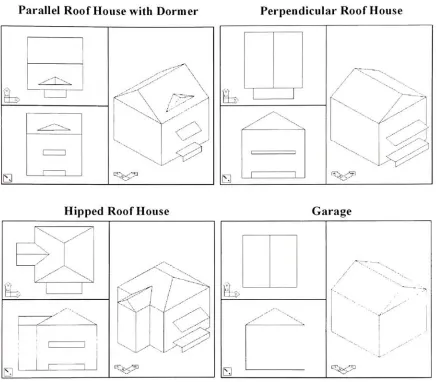
Figure 5.13
-AutoCad Houses
55
Figure 5.14
Miscellaneous
object
details
56
Figure 5.15
Atmospheric
profile
57
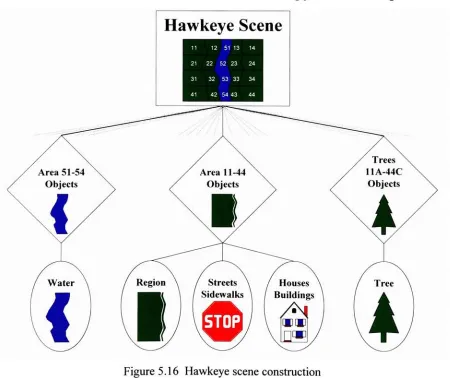
Figure 5.16
Hawkeye
scene construction
58
Figure 5.17
Primary
validationimagery
66
Figure
5.18-
Validation
points
67
Figure 5.19
Material
evaluation
-temperature
comparison
69
Figure 5.20
-Material
evaluation
ROC
results
72
Figure 5.21
Complex
phenomena validation points
74
Figure 5.22
Angular
effect evaluation
-asphalt streets
75
Figure 5.23
Angular
effect
&
shape
factor
evaluation
-asphalt shingles
77
Figure 5.24
Angular
effect curves
78
Figure 5.25
Angular,
shape
factor,
&
background
effect evaluation
grass
79
Figure 5.26
Angular,
shape
factor,
&
background
effect evaluation
- r.g.80
Figure 5.28
Ground
evaluation points
83
Figure 5.29
-Inframetrics
rank order correlationimagery
85
Figure
5.30-
Inframetrics
rank order
correlationresults
86
Figure 6. 1
THERM
input
parameters
89
Figure 6.2
-Shape factor
92
Figure 6.3
-Material
orientations
96
Figure 6.4
-Meteorological
parameter
sensitivity
analysis
97
Figure 6.5
Material
parameter
sensitivity
analysis
flow
chart
104
Figure6.6
-Material
parameter graph
analysis105
Figure 6.7
-Time
history
expected
temperature
erroranalysis graphs
Ill
Figure 6.8
Time
history
sensitivity
analysis
-Material
comparison113
Figure 6.9
DIRSIG
radiance
image
1 14
Figure 6.10
DIRSIG
debug
images
114
Figure 6.11
Angular emissivity
curve
115
Figure 6.12
-Histogram
comparison
116
Figure6.13
-Scene
analysis
118
Figure 6.14
-Histogram
comparison
summary
126
Table 3.1
-Radiance
equation
26
Table 3.2
Radiance
equation variable
definitions
27
Table 5. 1
Validation
imagery
-specification
summary
47
Table 5.2
Estimated
geometric
accuracy
60
Table 5.3
DIRSIG
input file
summary
60
Table 5.4
-RMS
error validationresults
Bendix
imagery
68
Table 5.5
-ROC
validation
results
-Bendix
imagery
72
Table 5.6
-^Angular
effect evaluation
-asphalt streets
76
Table 5.7
-Angular
effect
&
shape
factor
evaluation
- asphaltshingles
77
Table 5
.8
Angular, SF,
& background
effect evaluation- grass
&r.g
81
Table 5.9
-Inframetrics ROC
results
86
Table 6. 1
Meteorological sensitivity
results
98
Table 6.2
Material
parameter
sensitivity
results
106
Table 6.3
-Object
material parameter values124
Table 6.4
-Input
1.0
Introduction
A
new
tank
with a
low
thermal
signature
has recently been designed
by
a
foreign
country.
Will
the tank
be detectable
by
existing heat seeking
missiles
ordoes
a new
infrared
(IR)
sensor need
to
be designed
for
the
missile?-Or
can
improvements
be
madeto
the
computer
algorithms
of
the
existing
missileto
detect
the
newtank?
While
it
wouldbe
difficult,
if
not
impossible,
to
determine
an answerto these
questions
withoutthe
actualuse of
the
foreign
tank,
computer
models,
based
onthe
first
principles
ofphysics,
canactually be
usedto
answer
these
questions
before
the
military
forces
ever encounterthe
foreign
tank
in
a
realworld situation
whenlives may be
at risk.
With
the
increasing
capabilities
ofcomputers
in
the
last 20
years,
the
ability
to
model real worldsituations,
such as
this
hypothetical
scenarioinvolving
alow
thermal
signaturetank, has
dramatically
increased.
Specifically,
this
increase in computing
speed and
powerhas led
to the
development
ofartificial
images
that
canbe
usedin
computeranimation,
flight
simulation,
and computer aided
design
and manufacturing.This
process ofdeveloping
artificial
images
is
known
as synthetic
image
generation(SIG).
Synthetic
images
are
usefulin
a
vastarray
of
imaging
problems.They
canbe
usedto train
analysts
on
the
appearance
ofa
target
underdifferent
meteorologicalconditions,
times
ofday,
and
look
angles.
In
addition,
SIG
canbe
usedto
help
designers
evaluate various
sensorsystems
before
the
actual
hardware is
fabricated.
Synthetic
images
can also
help
determine
the
optimum acquisition parameters
for
a
realimaging
systemby
predicting
the
time
at
whichthe
greatest contrast
orresolution
willbe
obtainedfor
the
desired
targets.
The
result
is
a
large
savings
in
research and
development
costas
wellas
increased
performance and operational capabilities.
While
synthetic
images
canbe
created
in
virtually
any
regionofthe
electromagnetic
spectrum,
images
created
in
the
long
wave
(8-
14pm)
and mid
wave(3
-5pm)
infrared
regionsoffer unique signatures compared
to the
visible region.Synthetic
images in
the
LWIR
and
MWIR
are
primarily
influenced
by
the
thermal
properties
and emissivities of
characteristics
and signatures
ofobjects,
viewing
objects
in
simulated night
conditions,
and
finding
objects
hidden
or obscured
by
other
visiblefeatures.
While
scale models
ofthe
real world are often created
for
analysis of sensorsystems
in
the
visibleregion,
it is
extremely
difficult
and often
impossible
to
build
miniature models
withaccurate
thermal
characteristics.
Thus,
synthetic
images
are one
ofthe
only
waysto
predict
the
performance
ofan
infrared
sensor system.The
usefulness of
these
synthetic
images
is
negated
if
the
output
does
not
closely
imitate
the
real world.
As
a
result,
the
output
from SIG
must
be
evaluated and assessed
according
to
criteria
suchas
spectral and radiometricaccuracy,
geometric
fidelity,
robustness of
application,
andspeed
ofimage
generation(Rankin 1992).
Depending
uponthe
application and use
ofthe
synthetic
image,
these
criteria willhave
differing
weights ofimportance.
If
the
goal
ofthe
SIG
process
is
to
producevisually
appealing
pictures,
radiometric
fidelity
willbe
oflittle importance
while speed of
image
generation
may be
favored.
However,
in
most
technical applications, the
speed
ofimage
generation
is
sacrificed
for
radiometric
fidelity.
The
focus
ofthis
project
is
validating
the
Digital
Imaging
andRemote
Sensing
Image
Generation
(DIRSIG)
model
by
comparing DIRSIG
imagery
with realairborne
imagery.
While DIRSIG
was validatedin
the
IR
regionin
1
992
by
Rankin,
severalmodifications
have been
incorporated into DIRSIG
since
this
validation(Schott
et.
al.,
1994). This
validation will
test
some of
these
modifications as
well asthe
robustness
ofDIRSIG
as
the
synthetic
images
are compared
to
infrared
imagery
taken
at
different times,
look
angles,
and
locations.
An
algorithm
for modifying
and
optimizing
the
object material parameters
was also
developed in
an attempt
to
reduce
the time
required
to
develop
accurate synthetic
images.
In validating DIRSIG
and
analyzing
the
input
parameters,
the
project
wasdivided
into
smallertasks.
The
fist
step
was
to
define
the
exact goals and objectives of
the
were
researched
to
determine
the
weaknesses and strengths
ofDIRSIG. The
process
ofgenerating
a
DIRSIG
synthetic
image
was explained next.
All
this
background knowledge
led
to
a
technical
approach
that
could
be
used
in achieving
the
defined
objectives.
The
actual
experimental
validation of
DIRSIG
wasthen
described
in
detail,
followed
by
the
sensitivity
analysis and optimization
ofthe
input
parameters.Recommendations for
2.0
Objectives
2.1
DmSIG Validation
While
DIRSIG
was validated
using
groundtruth
data in
the
IR
region
in 1992
by
Rankin,
synthetic
images
from DIRSIG have
neverbeen
extensively
compared
orvalidated
withactual aerial
imagery;
the
primary
validationpriorto this
workused
rooftop
imaging
scenarios.
As
a
result,
the
validationshave
nottruly
explored
the
limitations
of
DIRSIG
and
its
ability
to
model
realaerialimagery.
Rankin's
validation
focused
onthe
DIRSIG
submodels andthe
sensitivity
ofthe
output
image
to
errors
in
various
input
parameters.Each
oftheDIRSIG
subroutines
werevalidated
individually
and recommendations
weremade
to
improve
the
synthetic
images.
These
recommendations
included
adding fractional specularity
and
transmissivity,
improving
the
shape
factor
computation,
adding
more materialsto the
material parameterdatabase,
modeling
clouds
in
the
scenes, and,
finally,
improving
the thermal
model.Based
upon
these
recommendations, DIRSIG
has
been
modifiedto
include fractional
specularity,
transmissive
objects,
and clouds.
However,
some of
the
otheroptions
have
not yetbeen
implemented.
This
validationconcentrates
onexamining
DIRSIG'
s
current
ability
to
recreatethe
entire
imaging
chain,
from
end
to
end
(excluding
opticaland noise effects
-DIRSIG has
these
capabilities
but
they
were not completeat
the time
of
validation),
withoutthe
ability
to
examine each submodel
that
is
usedin
the
creation ofthe
final
synthetic
image.
However,
it is
still possible
to
modify
the
input
parameters,
suchas
the
weatherfile
andmaterial
file,
to
improve
the
radiometric
accuracy
of
the
final
synthetic
image. The
testing
also
differs from
the
previous
validationin
that
it
further
explores
DIRSIG'
s
ability
to
include
atmospheric
attenuationand
sensor geometriceffects
in
the
final
results.Following
this
goal oftrying
to
evaluate
the
ability
of
DIRSIG
to
modelthe
realworld,
several
images
taken
withdifferent
imaging
systems
and parameters will
be
usedin
the
validation.
The primary
comparison and
validationwillbe
accomplished
withimagery
imagery
and
the
individual
material properties of allthe
facets
have
been
determined,
the
same scene
is
compared
to
the
secondary
truth
imagery.
The secondary
set
oftruth
imagery
from
an
Inframetrics
camera
greatly differs from
the
Bendix
truth
imagery.
The
Inframetrics
imagery,
which was acquiredat a
different
time
and
underdifferent
atmospheric
conditions,
willhelp
test
the
robustness ofDIRSIG in modeling
imaging
conditions
ofthe
same
target
scene.
In
conjunction
withthe
validationofDIRSIG,
aprimary
objective
is
to
create a
complex and realistic scene
that
can
be
usedin future
studies and
testing.
Synthetic
imagery
provides a
usefultool
to
test
image
algorithms andanalysis
techniques, but it
must
closely
resemble
the
real world.The
scenethat
is developed for
the
validation willprovide
this
capability.
It
willbridge
the
gap between
the
past validation ofDIRSIG,
where asimple scene
withknown
test targets
wasused,
and realimagery,
wherelittle
actualinformation is known. In
orderto
makethe
sceneas realistic as
possible,
the
scenemust contain
the
complex
interactions
between
objects,
including
buildings, houses,
trees,
and
otherstructures
that
are
found
in
the
real world.This
requires extensive
research ofthe
objects
in
the
sceneso
that
they
canbe
recreated accurately.
The
research and effortin
building
the
scene
wasshared
withRussell White
who will validateDIRSIG in
the
2.2 Input
Parameter
Analysis
& Optimization
In
addition
to
validating
DIRSIG,
a
procedurefor
optimizing the
synthetic
image
input
parameters
was
developed.
Previously,
a
trial
and
errorprocesswas
usedto
modify
the
input
parameters
untilthe
syntheticimage closely
resembledthe truth
imagery.
A
better
method
for
determining
these
input
parametersis
neededto
reduce
the time
required
to
generate
anaccurate
syntheticimage. This is
accomplishedby
first
determining
the
bounds
or
limiting
valuesfor
each ofthe
input
parameters,
and
then
determining
the
effect
of eachinput
onthe
syntheticimage. This step
alone
is
animprovement
over
the trial
and
errorguessing
processthat
waspreviously
used.While
bounding
values are
helpful in
determining
the
range of valuesfor
the
input
parameters,
the
most
effectiveway
to
fine
tune the
input
parametersrequires
asensitivity
analysis
of allthe
parameters.
A sensitivity
analysis shows which parameterscreate
the
largest
changes,
and
therefore,
most probable
errorin
the
synthetic outputimage. The
parameter with
the
highest sensitivity
canthen
be
alteredfirst
to
try
and
matchthe
synthetic and
realimagery,
ora
combination ofthe
most sensitiveparameters
canbe
alteredto
create
the
desired
output.
In
addition,
a confidence
interval
in
the
estimationof
the
input
parameters,
i.e.
an estimated
error,
should
be developed for
each
input.
Similar
to the
sensitivity
analysis,
this
willindicate
whichparameters are most
likely
to
cause
errorin
the
output
image.
The sensitivity
analysis and
the
error estimation willprovide
tools
for
the
input
parameter optimizationprocess.
For
example,
a
large
errorin
the
estimation of a
material
parameter can
be
tolerated
if
the
output
image
is
not
sensitiveto
variationsin
that
variable;
however,
it
wouldbe
essential
to
alter
aparameter
witha
large
errorin its
predicted valueif
the
image is
highly
sensitive
to
that
parameter.
This
method
offine
tuning
the
material parameters
willlikely
reduce
the time to
generate
syntheticimages
whilealso
establishing
guidelines
for
eventually
automating
the
selectionand
modificationofthe
materialparameters.
Images
ofthe
same
region of
interest
acquired
underdifferent
imaging
conditions,
such
as a
nadir versusoblique
look
angle,
or
morning
versus night
acquisition,
are also
exact same appearance
underdifferent
imaging
conditions.The
multiple
images
ofthe
same scene
may
provide
insight into
the
reflectivity
and
emissivity
of
the
objects
in
the
scene.
For example,
the
temperature
of an aluminum-sidedbuilding
and
a wood-sided
building
that
have
been
wannedby
direct
sunlight
willbe
vastly
different
whencompared
to the
respective
temperatures
ona
cloudy day.
On
asunny
day,
the temperature
ofthe
aluminum rises
rapidly
as
the
energy from
the
sunis
absorbed,
but
onthe
cloudy
day,
the
temperature
of
the
aluminum
willnot rise
asmuch.
Similarly,
the
temperature
ofa
wood-sided
building
willbe
greater ona
sunny
day
than
ona
cloudy day.
However,
the
wood-sided
building
willnot
have
a
large
changein
temperature
between
the
cloudy
day
and
the
sunny
day
because
woodhas different
thermal
properties
than
aluminum.It
is
the
difference
in
appearances
ofthe
objectsthat
canhelp
indicate
some ofthe thermal
materialproperties.
The
facet
material parameters canthen
be
adjustedto
logically
accountfor
the
images
generated
underthe
different
acquisition parameters.The
useof multiple
images
3.0
Background
3.1 The
Big
Equation
In
order
to
understand
the
syntheticimage
generationprocess,
it is first
necessary
to
understand
the
physics and
underlying
principlesthat
are
involved
in
the
capture
ofa
real
image.
The
first
step
is
to
visualizehow
the
observedelectromagnetic
radiationultimately
reaches
the
sensor.
The
observedradiance at
the
front
end of
the
sensoris
comprised
ofnine
different
photon paths.The
following
diagrams
showthe
different
paths
that
electromagnetic
radiationmay
travel
before reaching
the
sensor.
The
first
diagram
shows
the
radiationoriginating from
solarphotons while
the
second
diagram
shows
the
radiation
resulting from
self-emissionby
the
objects.
Figure 3
.1
Solar energy
photon paths
Type A
-Directly
reflected solar photons attenuated
by
the
atmosphere and clouds
Type B
-Solar
Photons
reflected
from
the
background
onto
the target
Type
C
-Solar
photons scattered
by
the
atmosphere
Type
G
-Solar
photons scattered
by
the
atmosphere onto
the target
solar "-photons ^-photons '&photons '
^
photons=
E"
cosa'-r^
+
F-Edsl
-r2
+(\-F)-LbsXrdz2
+
Lu
Figure 3.2
-Self-emitted energy
photon pathsType D
-Self-emitted
photons
from
the target
attenuatedby
the
atmosphereType
E
Self-emitted
photons
from
the
sky
reflectedby
the target
to the
sensorType
F
-Self-emitted
photonsfrom
the
atmosphereType H
Self-emitted
photons
from
the
background
reflectedby
the
target to the
sensort
=
D
+F
+F
+H
self-emission photons photons photons photons
=
Ltx
^2+F-EdeXr2+(\-F)rd LbeX
t2
+
LueX
n(3.2)
After combining
these two
equations,
Za
=Lsoiar+Lseif.em,ssw^
the total
spectralradiance
reaching
the
sensorcan
be
described
by
the
following "big
equation":r{X)
rM)
Lx
=Escosa'^^z](X)T2(l)
+
(A)LTXT2(X)
+
F[Edsl+EdX]^-^-T2(A)
+
K K
{\-F)[LbsX+Lbxyd(A)z2(A)
+
LusX+Lu
cX
(3.3)
Es
Exoatmospheric
irradiance
cos a-the
angle
from
the
target
normalto
the
sunzi
-transmission
of
the
atmosphere
from
the
sun
to
the
target
t2
-transmission
of
the
atmosphere
from
the target
to the
sensore(X)
-target
emissivity
Itx
-self-emitted radiance
from
target
at
temperature
T
Edsx
-solar
downwelled
irradiance
Edex
-self-emitted
downwelled irradiance from
the
F
-shape
factor
(amount
ofsky hemisphere
that
the
target
can
see)
1-F
-the
percentage of
the
atmospherethat
is
blocked
by
the
background
objectrd(X)
-target
reflectance
Ibsx
-background
radiancefrom scattering
Lbcx
-background
radiance
from
self emission
LuSa
-upwelled
radiance
due
to
scattering
ofthe
atmosphere
LUEx
-upwelled
radiancedue
to
the
self emissionof
the
atmosphere
This
equation represents
allthe
sources
of radiationthat
are
ofsignificant
importance
in
determining
the
radiance
that
reaches
imaging
systems sensitive
to
0.3
-14.5u.rn
wavelengths.
As
noted,
this
equationis
dependent
uponthe
wavelength.Depending
uponthe
spectralsensitivity
ofthe
imaging
system,
this
equationmay be
simplified
by
neglecting
certainterms
since
their
effects are
minimalat
those
wavelengths.While
both
solar photonsand self-emissive
photons mustbe
accounted
for in
the
MVVTR,
solar
photons are
oflittle
importance
for
this
validation and canbe
neglected
in
the
3.2
Alternative SIG
Models
In
order
to
generate
any
syntheticimage,
severalinputs
must
be defined
to
produce
the
desired
objects
in
a specified
environment.For
almost
all computermodels,
these
basic
inputs include
a geometrical
representation ofthe
object,
an atmospherictransmission
model,
radiation sources and
material characteristics.Some
modelsalso
include
texturing
abilities and
thermal
submodels.
The
overallaccuracy
of
the
final
syntheticimage depends
on
the
individual
accuracy
and
integration
ofthese
submodels
as wellas
the
intended
use ofthe
synthetic
images.
Therefore,
it is
beneficial
to
examine other
SIG
models
to
learn
whereimprovements
might
be
made
to
the
currentDIRSIG
program.One
oftheleading
computermodels
for
the
creation of accurateradiometric synthetic
images
wasdeveloped
by
the
Electromagnetics
Laboratory
ofthe
Georgia Tech Research
Institute
(Cathcart
and
Sheffer,
1988
a,
1988
b)
This
SIG
program, the
Georgia Tech
Visible
and
Infrared Synthetic
Imagery
Testbed
(GTVISIT),
integrates
the
outputsfrom
the
submodels
MAX, GTSIG, IRMA
andMODELIR
to
createa
syntheticimage. Each
GTVISIT
scene
is
comprised oftwo
main
aspects,
a gridded
terrain
background
and
faceted
objects
located in
that
background.
The
gridded
database
consists
offeatures (material
types),
elevations,
radiance
values,
andthermal
IR
reflectances
wherethe
elevation andfeature
data may
be
real, synthetic,
ora
hybrid,
andthe
radiance
andinfrared data
are
determined
from
the
temperature
and
reflectivity
ofthe
object.
The
following
diagram
outlines
the
inputs
andprocess
in creating
a
GTVISIT
synthetic scene.
OBJECTS
Geometric
Model
Radiance
Model
Sensor
Path
Locations
GTVISIT
Background
Radiance
Gridded
Database
Topographical
Data
Using
all
the
various
inputs into
GTVISIT,
it is
then
necessary
to
integrate
these
parts and
determine
the total
radiancereaching
the
sensor.Different
models propagate
the
radiance
from
the
scene
to
the
sensorthrough
severaltechniques.
While DIRSIG
employsa
ray-tracing
method,
GTVISIT
usesa
Z-buffer
algorithmbased
onthe
principle
ofdisplaying
orconcealing
surfaces
using
a
visualline
of sightto the
sensor.GTVISIT
also
includes
atmospheric
attenuationfor
each objectin
the
sceneby
pre-computing
the
radiance values
in 12
orientations and
then
assigning
an atmospheric radiance valueto the
facet. The
thermal
radiance
valuesare
then
computedusing first-principles
techniques
contained
in
the
GTSIG
submodel ofGTVISIT.
By
modeling
allthese
real worldphenomena,
GTVISIT
createsfairly
realisticradiometric
images.
However,
it falls
shortin
that
it does
notaccount
for
angularemissivities
orbackground
effects
onthe
radiance ofthe target.
In
addition,
GTVISIT
does
not
determine
the
solarhistory
for
the
objects
in
the
scene.Thus,
whileGTVISIT
is
one
of
the
leading
developers
of radiometric syntheticimages,
there
is
still roomfor
improvement.
The Physical Reasonable Infrared
Signature
Model,
PRISM,
is
anextremely
detailed
model
relying
on
highly
sophisticated
CAD drawings
to
create
radiometrically
accuratemodels
ofvehicles,
primarily
tanks
(Gonda
andGerhart,
1989).
This
modelrelies on3-D
isothermal
facets
that
interact
witheach otherthrough
conduction, convection,
andradiation.
PRISM
modelsboth
the
internal
and
externalfeatures
ofthe tank.
Using
a
Faceted Region Editor
(FRED),
BRL-CAD
vehicle
descriptions
are
translated
into
a
format
that
PRISM
canthen
useto
predict
the thermal
signature.
PRISM
is
alsoable
to
calculate
the
solar
history
and
hence
temperature
of each
facet
for
a
diurnal
time
period.However,
PRISM
fails
to
calculatethe
interactions between
the
target
and
the
background.
Targets
are
"cut
andpasted"
into background
scenes.
PRISM
createsvery
realistic
images,
but
the
difficulty
in creating
the
detailed drawings
andits
failure
to
account
for
the
interactions between
the
background
and
the
target
prevent
its
widespreadTexas
Instruments
(Tl)
has
alsodeveloped
a
syntheticimage
generator
for
use withautomatic
target
recognition
(ATR)
algorithms
(Lindahl
et
al.,
1990). This
multi-sensorsynthetic
image
generator
is
capable ofproducing
IR,
television
(TV),
and
Laser Radar
images.
The
following
diagram
illustrates
the
Tl
synthetic
image
generation process.
Sensor
Information
Terrain
Map
All Objects.
Scene
Geometry
FOVAREA
DETERMINATION
Active Terrain Object clipping InformationOBJECT
FOV CLIP
Active ObjectsTERRAIN
AND
OBJECT
TRANSFORMATIONS
Ground
Truth
Information
Scene
Shading
SUN TO
SURFACE
VISIBILITY
TransformedPointsVISIBLE
SURFACE
DETERMINATION
Normal " Vectors " Resolution InformationHigh Resolution
Geometry Array
Ground Truth(GT)
InformationGREYSHADE
APPLICATION
ANTI
ALIASING
High Resolution Shaded Image->GT Info
-?Sensor Resolution Shaded Image Point Greyshades Edge List
Figure 3.4 Tl
synthetic scene generation
(Lindahl
etal.,
1990)
Similar
to
most
SIG's,
Tl
usesfaceted
objects placed
in
afractal interpolated
background
environment
derived from Defense
Mapping Agency (DMA)
Digital Terrain Elevation
Data
(DTED)
andDigital Feature Analysis Data
(DFAD).
The
objects,
whichare created
using AutoCad
10,
are
initially
placed onto
the terrain
scene
using
worldcoordinates and
then
both
the terrain
and
the
objects are
translated to
sensor coordinates.
Trees may
also
be
added
to the
scene
using
a
fractal
initiator/generator
technique.
Similar
to
GTVISIT,
a
Z-buffering
algorithmis
then
used
to
determine
whichobjects are
hidden from
the
sensorby
other surfaces.
LOWTRAN 7
is
also used
to
predict atmospheric
transmission
and
attenuation.
The Texas
Instruments
synthetic
image
generator also
includes
the
ability
to
include
sensor effects
for
each of
the
different
sensor
types;
colored-noise
that
resemblesto
speed
the
generation
ofthe
syntheticimage,
"a
two-dimensional
Gaussian
point-spread
function is
used
to
approximate
the
effects
of opticaldiffraction
andblur,
detector
and
LED
spatial
response,
and
stabilizationjitter for both
the
IR
andTV
sensors"
(Lindahl
et
al.,
1990).
TFs
multisensor synthetic
image
generator sacrifices radiometricaccuracy for
computational speed.
Its
use ofgray-shading
and exclusion of solar or speculareffects
in
the
synthetic
images
reduce
its
abilities
to
modelthe
real world.The
results are
realisticlooking
images,
but have
questionable
radiometricfidelity.
It
provides usefulsynthetic
images for
automatic
target
recognitionalgorithms whichrely
more onrelative
image
contrasts
than
absolute radiometric accuracy.
Therefore,
whilethis
systemcan modelmany
different
sensors,
it is
oflittle benefit
to those
trying
to
assessthe
absoluteradiometry.
Aerodyne
Research,
Inc.,
currently
usesthe
SPIRITS 2.0 (Spectral Infrared
Imaging
of
Targets
and
Scenes)
infrared SIG
programfor modeling
aircrafttargets
and
exhaustplumes
(Stets
et
al.,
1988).
Relying
on
the
LOWTRAN
atmospheric model andIR
Cloud
Radiance Model
(CLOUD)
to
recreate
the
atmosphere,
SPIRITS
integrates
the
results of
cluttered
background
ofterrain,
sky
and cloud
withtarget
images. While
this
program producesvery detailed
results
ofaircraft and
vehicles withexhaust
signatures,
it has
somelimitations.
It
fails
to
create
high
resolutionground scenes and
eventreats the
earthas a
flat
object
witha
uniformtemperature
and
diffuse
reflectivity.In
addition,
because
the
target
and
background
are computed
separately,
it
is
not
possibleto
include background
effects
in
the
calculations;
however,
this
does
not
greatly detract from
their
modelsince
most
oftheir
scenes
involve high
flying
aircraft.
This
approach
wouldnot
be
possiblefor
useby
DIRSIG
whenhigh
resolutionground scenes
with radiometricaccuracy
arethe
primary
goal.
A
new versionof
this
program
known
as
AC-1
is
scheduledfor
releasenext
year.
Some preliminary information
about
this
new program
willbe
available
soonfor
The
Simulated
Infrared Image
(SIRTM)
program createdby
the
Environmental
Research
Institute
ofMichigan
(ERTM)
is
vastly different from
otherthermal
synthetic
models.
It
calculates
temperatures
based
onthe
3-D
volumeof
anobject,
versustraditional
surface
modeling.The
volumemodeling is
achievedby
subdividing
the
volumeof
an object
into
elements
call voxels."The
voxels aresimply
cubic solidsthat
fill
the
volume
ofthe
object"(Lyons
1991).
This division
ofthe
objectinto
voxelsallows
for
complex
thermal
interactions
and resultsin
accuratetemperature
predictions.Thus,
it
could
be
usefulin modeling
thermal
plumes and othervolumetric shapesthat
have
complex
thermal
gradients.
Because
ofthis
uniquemodeling
ofobject
volumes,
the
geometric representation
of anobject
is defined using
constructive solidgeometry
(CSG)
models
in BRL-CAD.
Boundary
modelrepresentations,
including
wireframeand surface
models,
may be
converted
to
CSG
models
using
specializedtranslation
programs.Similar
to
otherhigh
end
thermal
SIG
models,
a
ray
tracer
is
also
used.The
ray-traceraids
in
creating
the
voxels,
determining
the
solarloading
ofthe voxels,
and
accounting for
target-background interactions.
Four primary
modules are usedin
the
image
generationprocess,
in
additionto the
geometric
modeling
and
ray-tracing.The information first
travels
into
the
VOXCRE
module where
the
object
volumeis divided into
voxels.The information
is
then
directed
to the
VOXSUN, SVOXTMP,
and
RADCLC
modules.
The VOXSUN
module,
in
conjunction with
the
ray-tracer,
determines
which voxels are exposedto
solarheating
andoutputs
the
results
to the temperature
predictionmodule,
SVOXTMP
SVOXTMP
accounts
for
the
conduction,
convection,
andradiation exchange
between
the
voxels andsurrounding
object
voxelsas
wellas
the
environment.
The
output
is
a"three-dimensional
temperature
distribution
ofthe
object as a
function
of
time
but independent
of sensor orviewing
geometry."
The
temperature
results are
then
used
in
the
RADCLC
module
to
determine
the total
radiance.The RADCLC
module
integrates
the
self
emissionof
the
object
due
to temperature
andthe
reflectedradiance
from
the
environment.This
is
where
SIRIM does
not propagate
this
radianceto
a
sensor orinclude
any
atmospheric
transmission effects;
it is
not a complete end-to-end
simulationpackage.
This
is
a
majorlimitation
of
SIRIM.
In
addition,
the time
requiredfor
the temperature
calculations are
extremely
time
consuming
and
computer resourceintensive.
If
speed
improvements
could
be
made
to the thermal calculations,
SIRIM
wouldbe
a valuablereplacement
to
THERM,
the
DIRSIG
thermal
model.
In
its
currentform,
the
prolonged runtimes
ofSIRIM
weighed against
the
added
thermal
accuracy do
no
warrantits integration
into
DIRSIG.
By
examining
othersynthetic
image
generationprograms,
it is
possible
to
determine
the
strengths and
the
weaknesses
ofthese
otherSIG
models.
The ideal
solution
wouldbe
to
create a synthetic
image
generationprogram
that
incorporated
the
strengths of all
the
3.3
DHISIG Overview
In
order
for
a synthetic
image
to
accurately
resemblethe
realworld,
it
is necessary
to
develop
acomplete
mathematical model ofthe
entireimaging
chain.This
requires
anunderstanding
of
the thermal
radiance
ofthe
objectsin
the
scene as
wellas
the
atmospheric
effects
onthe
radiance
that ultimately
reachesthe
IR
sensor.
The
sensor
effects must also
be
incorporated into
the
modelto
createrealistic synthetic
images.
With
allthese
inputs,
it is
then
possible
to
try
and
develop
a
syntheticimage.
DIRSIG
attempts
to
model
the
entire
imaging
chainusing
the
inputs from
varioussubmodels.
The
following
diagram,
Figure
3.5,
provides
abrief
overviewofthe
submodels usedin recreating
the
Ltreal
world"for
a
DIRSIG
synthetic
image.
Each
ofthese
submodels
willbe described in
detail.
Geometry
Sensor
Submodel
I
Submodel
Ray-Tracer
Submodel
Final
Image
I
1
Thermal
Submodel
Radic
Sub
>metry
model
Figure
3.5 DIRSIG
overview3.3.1
Scene
Geometry
Submodel
In creating
asynthetic
image,
one
ofthe
first
steps
is
to
build
geometric models
ofthe
3
-Dimensionalobjects
that
willbe in
the
output
image.
This
is
accomplished
using
computer
aided
design
software
known
as
AutoCad
that
has been
enhanced
with specializedDIRSIG
related routines.
In
order
to
develop
a scene
that
canbe
usedby
DIRSIG,
it is
necessary
to
create parts and objects
that
are made
up
of
individual facets.
A
facet is
a
collection ofpoints,
usually
triangular
orrectangular,
witha
normal vectorthat
describes
the
convexplane.
These
facets
are
the
elementary
building
blocks
to
whichvarious
parameters or attributes are assigned and are
then
be
used
by
the
otherDIRSIG
Attributes
Material Name
Material
Code
-yto;-;--N
Default
Temperature Thickness
Self-Generated Power
Default
Shape Factor
Material Properties
Figure
3.6
Facet
material parametersThe
faceted
parts
arethen
combined
to
form
anobject,
and,
finally,
multiple objects
may
be
integrated into
onedrawing
to
createthe
final 3-D
scene,
asdepicted in Figure 3.7.
Scene
Node
Figure
3.7
DIRSIG Data
Hierarchy
(Schott
et
al.,
1993)
A
certaindata
structureand
hierarchy
of
information is
assigned
to the
eachobject,
computations
and require more
computerstorage
memory.Starting
at
the
highest
level,
the
scene node contains
the
name,
date,
geographicalcoordinates,
and
numberof objects
of
the
scene.
The
object node
then
containsthe
name,
ID
number,
number ofparts
in
that
particular object
withpointers
to
nodesdescribing
eachpart,
and
the
coordinates
that
define
the
edges
ofthe
bounding
volume.The
bounding
volume ofthe
object
is
usedwhen
the
rays are cast
into
the
scene
(see Figure 3.8). If
the
ray does
not
hit
the
bounding
region of
the object,
it
is
not
necessary
to
cast
the
ray into
the
parts
andfacets
of
that
object.
This
helps
to
reduce
the
computationtime
for
the
ray-tracersubmodel.
The
part
nodedata
structure
is
the
same
asthe
objectnode,
withbounding
volumesto
eliminate
the
need
to
check each
facet
withinthe
partfor
aray intersection.
Finally,
the
facet
node
links
the
geometric
location
and orientation
ofthe
facet
withthe
material properties./
/
"
l-r-O-ft
/
^^^
^
volume
/
\
^aAifioW-^
/
\
__facet
^+@-^fnr(
object
bounding
volume
Figure
3.8
Object &
part
bounding
volumes(Schott
etal.,
1993)
After
allthe
DIRSIG
hierarchy
has been
established
andthe
scene
is
complete,
the
AutoCad
scene
is
then
'translated'into
real world geographical coordinates so
that
the
other
submodels
ofDIRSIG
canrecognize
the
inputs.
3.3.2
Ray-Tracer Submodel
The
ray-tracer submodelis
the
vitalconnection and
link
to
allthe
DIRSIG
submodels.
This
submodelretraces
the
hypothetical
path of a
photon afterit
has
reached
the
sensor.
Beginning
at
anindividual
pixel
in
the
synthetic
image,
a
ray
is
cast
into
the
Sensor
Field oi viewin Y
Fieldof viewinX
Mpixels
Figure
3.9 Ray-tracer
(Schott
etal.,
1993)
An
iterative
process
is
usedto
determine
the
interaction
ofthe
ray
with eachobject, part,
and
facet
in
the
scene.
From
these
interactions,
the
path ofthe
radiancereaching
the
sensor canbe
determined.
The energy
losses
and gainsassociated
withthe
atmosphereare
included
in
the
process.This
allows
the
proper radiance at each pixelto
be
computedby
the
radiometry
submodel.The radiometry
submodelis
described in detail
in
Section 3.3.4.
Because
eachray
mustbe
tested
for intersection
withevery
single
objectin
the
scene,
bounding
volumesfor
each object and part weredeveloped
to
reduce
the
numberofinteractions
that
mustbe
examined.This
process reduces computation
time
because
if
an objectis
nothit
by
the ray,
it
is
notnecessary
to
determine
the
interaction
of
that
ray
withthe
sub-parts orfacets.
These
bounding
volumes
may
be
parallelepipeds, cubes,
or spheres.If
a
ray
hits
a
particularobject,
it is
then
checked
withthe
parts
in
that object,
andfinally,
the
interaction
withthe
individual facets is
determined. If it
is
found
that
a
facet has been
hit
by
a
ray,
the
solarhistory
ofthe
facet is
established so
that
a
moreaccurate
temperature
canbe
predicted
by
THERM. THERM
usesdirect
insolation,
ordirect
sunlight
values,
from
the
weatherfile
to
more
precisely
predict
the temperature
ofThe
solar
history
of
the
objectis
stored
in
anarray
as a
function
oftime
with valuesranging
from
0
to 1
.|0.0|1.0|1.0|02|0.1|0.0|0.0|0.0|0.0|0.0|1.0|1 0|10|1.0] 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Figure 3.10 Solar
history
(Schott
et
al.,
1993)
If
the
object
wasilluminated
by
the
sunat a
particulartime,
a
value greaterthan
0
is
placed
in
the
array
and
the
solarloading
term
in
the
weatherfile is
weighted
by
this
value.However,
if
the
object
has
been
in
the
shadow or notilluminated
by
the
sun,
a
value of0
is
placed
into
the
array.
Therefore,
whenthe
solar
loading
valuein
the
input
weatherfile
is
multiplied
by
the
solarhistory
valueof
0,
the
overall effectis
a zero solarloading
term
whenthe target
has
been in
shadow.After
the
solarhistory
ofthe
facet has been
determined
andthe
resulting direct insolation
valueshave been
calculated,
the temperature
of
the
facet may
then
be
computed
by
THERM.
Once
a
ray hits
a
facet
andthe
solarhistory
has been
calculated,
the
interaction
between
the
ray
and
the
facet depends
onthe
specularity
and shape
factor
ofthe target
A
target
may be
specular,
diffuse,
a
combination ofthe
two,
or eventransmissive
(see
Figure
3.11). The
shape
factor
of
the
facet is
also calculated at
this time
as
additionalrays
are cast
from
the
facet
to
determine
the
amountof atmosphere
that
is
blocked
by
surrounding
objects.
Totally
SpecularTotally
Diffuse Combination of Specular & DiffuseTransmissive
If
the
facet
is
reflective,
then
secondary
rays mustbe
cast
out,
similarto the
original
ray-tracing
method.
For
completely
specular
targets,
a single
ray
is
cast out at an angle equal
to the
incidence
angle.
The
properties
ofthe
background
are
determined
and
then
used
to
calculate
the
radiance
ofthe
target
facet.
However,
most
targets
are
notcompletely
specular.
This
requires
amore rigorous
method ofdetermining
the
background
effects.
Therefore,
'diffuse'secondary
rays are cast out
overthe
hemisphere
at
15increments
in
the
zenith and
30increments
in
the
azimuth.
The
procedurefor
determining
the
background
hits
is
the
same as
for
the
specular case:test
eachobject, part,
and
facet.
Then,
for
each
secondary ray
that
is
cast,
the temperature
and properties ofthe
object
that
is
hit
are recorded.
The
combined effects
ofthese
secondary
hits
areintegrated
to
approximate
the
diffuse
radiance value
reaching
the target.
While
this
process
ofcasting
rays could continue
indefinitely,
amaximum
oftwo
bounces i