Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
2005
Comparison of Hyperspectral Imagery Target
Detection Algorithm Chains
David C. Grimm
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
Comparison of
Hyp
erspectra
l Imagery Target Dete
ction
Algorithm
Chains
by
David C
.
Grimm
B.S. Electrical Engineering
,
Clarkson University
,
2000
A thesis
submitted
in partial fulfillment
of the
requirements for
the
degree
of
Master
of
Science
in the
Chester
F Carlson
Center
for
Im
aging
Science
Rochester Institute of Technology
October 14, 2005
Signature
of
the Author
_-=D...::.a:..:.v.:..:id,,--C-=,--" G=.:r:..:.im:..:....:.:..m'-'----_ _ _ _ _ _ _ _ _ _ _ _ _ _
_
Accepted by
Illegible Signature
C
HESTE
R F
CARLSO\' CE\,TER
FOR Il\IAGING
SCIENCE
RO
C
HESTER I\'STITlITE OF
TECH~OLOGY
RO
C
HESTER
.
\,E~-YORK
CERTIFICATE
OF APPROVAL
\1.S. DEGREE THESIS
The
)'f.S. Degree
Thesis
of David C. Grimm
has
been
examined
and
approved by
the
thesis committee as satisfac
tory for the
thesis
required for
the
;"1.S. degree
in Imaging Science
John Schott
Dr. John Schott
, thesis
Advisor
John Kerekes
Dr. John Kerekes
David Messinger
Dr
.
David Messinger
Date
THESIS RELEASE PERMISSION
ROCHESTER INSTITUTE
OF TECHNO
LOGY
CHESTER F.
CARLSON CENTER FOR IMAGING
SCIENCE
Title of Thesis
:
Comparison of Hyperspectral Imagery Target Detection Algorithm
Chains
I,
D
avid
C. Grimm, hereby grant permission to
Wallace
Memorial
Library
of
R.I.T.
to reproduce
my thesis
in whole
or
in part
.
Any
reproduction will not be for
commercial use or profit
.
Signature
David
C.
Grimm
Date
DISCLAIMER
The
views expressedin
this
publication arethose
ofthe
author anddo
not reflectthe
officialpolicy
or position ofthe
Comparison
of
Hyperspectral
Imagery
Target Detection Algorithm
Chains
by
David C.
Grimm
Submitted
to the
Chester
F.
Carlson Center
for
Imaging
Science
in
partialfulfillment
ofthe
requirements
for
the
Master
ofScience
Degree
atthe
Rochester Institute
ofTechnology
Abstract
Detection
of aknown
target
in
animage has
severaldifferent
approaches.The
complexity
and number of steps
involved in
the target
detection
process makes a comparison ofthe
different
possible algorithm chainsdesirable.
Of
the
different
stepsinvolved,
somehave
amore significant
impact
than
others onthe
final
resultthe ability to
find
atarget
in
animage.
These
moreimportant
steps ofteninclude
atmosphericcompensation,
noise anddimensionality
reduction,
background
characterization,
anddetection
(matched
filtering
for
this
research).A brief
overview ofthe
algorithmsto
be
comparedfor
eachstep
willbe
presented.
This
research seeksto
identify
the
mosteffective set of algorithmsfor
detecting
aknown
tar
get.
Several different
algorithmsfor
eachstep
willbe
presented, to
include
ELM, FLAASH,
ACORN, MNF,
PPI,
N-FINDR, MAXD,
andtwo
matchedfilters
that employ
a structuredbackground
modelOSP
andASD. The
chains generatedby
these
algorithms willbe
compared
using the
Forest Radiance I HYDICE data
set.Finally,
ROC
curves andAFAR
values are calculatedfor
each algorithm chain and a comparison ofthem
is
presented.Detection
rates at a
CFAR
are also compared.Since
arelatively
small number of algorithms wereContents
1
Introduction
13
2
Atmospheric Compensation
17
2.1
Empirical
Line Method
(ELM)
....18
2.2
Atmospheric Inversion
. . .... ...19
2.2.1
Fast Line-of-Sight Atmospheric Analysis
ofSpectral Hypercubes
(FLAASH)
22
2.2.2
Atmospheric CORrection Now
(ACORN)
.... ....23
2.3
Discussion
.24
3
Dimensionality
/Noise
Reduction
25
3.1
Principal
Components Analysis
(PCA)
26
3.2
Maximum Noise Fraction
(MNF)
.26
3.3
Discussion
. .28
4
Endmember Selection
31
4.1
Pixel
Purity
Index
(PPI)
...32
4.2
MAXD
33
4.3
N-FINDR
33
4.4
Discussion
.......
3g
5
Matched Filters
37
5.1
Matched Filters
Using
Structured
orGeometric Background
Models
...
38
CONTENTS
5.1.1
Orthogonal Subspace
Projector
(OSP)
39
5.1.2
Adaptive Subspace Detector
(ASD)
.40
6
Methodology
41
6.1
Data
Set
. . . ...41
6.2
Target
Selection
. . . ... .... . .43
6.3
Atmospheric Compensation
. .44
6.4
Dimensionality
/
Noise
Reduction
. . .45
6.5
Background
Endmember
Selection
. .46
6.5.1
PPI
. .46
6.5.2
MAXD
. .47
6.5.3
N-FINDR
...48
6.6
Detection
andMetrics
....50
6.6.1
ROC Curve
andAFAR
Generation
50
7
Results
53
7.1
Atmospheric
Compensation
. . ....53
7.2
Algorithm Chain Evaluation
. .55
7.2.1
Average (1
AFAR)
Values
62
7.3
Conclusions
andFuture Work
65
A
ROC Curves
andAFAR Data
67
List
of
Figures
1.1
Example
of anHSI image
14
1.2
Typical
target
detection
algorithm chainflow
chart16
2.1
Graphical
representation ofELM
for
two
bands. The
marked points arethe
"ground
truth"points
19
2.2
Absorption
spectra of several common molecular constituentsin
the
atmosphere
(Schott,
1997)
20
2.3
Absorption
spectrum of water21
3.1
Principal
componentimages
from
a sixband image
ofRochester,
NY. Per
centage of variance
in
eachPC band in
parentheses(Schott, 1997)
27
4.1
Example PPI
projection(Boardman
etal.,
1995)
33
4.2
MAXD
endmemberselection algorithm(Lee,
2004).
.34
4.3
Convex
hull for
atwo
band
image
34
4.4
Maximum
volume convexhull
for
atwo
band image
(Senna
Consulting,
2004).
35
5.1
Graphic
representationofstructuredbackground
model matchedfilter
operations
(Manolakis
andShaw, 2002)
.39
6.1
Three
band RGB
representation ofthe HYDICE
sensordata
setRun 05
from
LIST
OF
FIGURES
7.1
Reflectance
values,
measured andderived
by
atmospheric compensationfor
a
2%
gray
scale panelin
the
Forest
Radiance I
scene54
7.2
Reflectance
values,
measured andderived
by
atmospheric compensationfor
a
32%
gray
scale panelin
the
Forest
Radiance I
scene54
7.3
1
AFAR
valuesfor
the
F3
target
55
7.4
1
AFAR
valuesfor
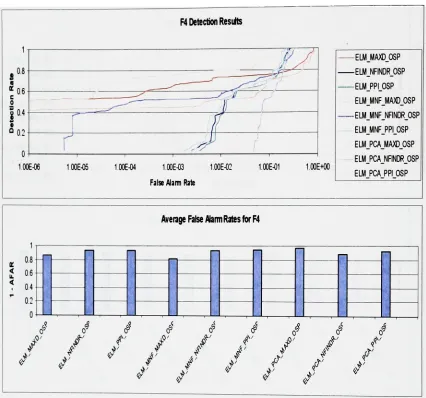
the
F4
target
56
7.5
1
AFAR
valuesfor
the
F13
target.
. .56
7.6
1
AFAR
valuesfor
the
C5
target
56
7.7
1
AFAR
valuesfor
the
F8
target
57
7.8
1
AFAR
valuesfor
the
VF1
target
57
7.9
1
AFAR
valuesfor
the
VI
target
57
7.10 1
AFAR
valuesfor
the
VF6
target
58
7.11 Detection
rates at aCFAR
of10-4for
the
F3
target
59
7.12 Detection
rates at aCFAR
of 10-4for
the
F4
target
60
7.13 Detection
rates at aCFAR
of 10~4for
the
F13
target
60
7.14 Detection
rates at aCFAR
of 10-4for
the
C5
target
60
7.15 Detection
rates at aCFAR
of 10~4for
the
F8
target
61
7.16 Detection
rates at aCFAR
of 10"4for
the
VF1
target
61
7.17 Detection
rates at aCFAR
of 10"4for
the
VI
target
61
7.18 Detection
rates at aCFAR
of 10"4for
the
VF6
target
62
A.l
ROC
and(1
-AFAR)
graphsfor
the
C5
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
ASD
matchedfilter
68
A.2
ROC
and(1
-AFAR)
graphsfor
the
C5
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
OSP
matchedfilter
69
A.3
ROC
and(1
-AFAR)
graphsfor
the
C5
target that
employedthe
ELM
LIST
OF FIGURES
A. 4
ROC
and(1
-AFAR)
graphsfor
the
C5
target that
employedthe
ELM
atmospheric compensation algorithm and
the
OSP
matchedfilter
71
A.5
ROC
and(1
-AFAR)
graphsfor
the
C5
target
that
employedthe
FLAASH
atmospheric compensation algorithm and
the
ASD
matchedfilter
72
A.6
ROC
and(1
-AFAR)
graphsfor
the
C5
target that
employedthe
FLAASH
atmospheric compensation algorithm and
the
OSP
matchedfilter
73
A.7
ROC
and(1
-AFAR)
graphsfor
the
F3
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
ASD
matchedfilter
74
A.8
ROC
and(1
-AFAR)
graphsfor
the
F3
target
that
employedthe
ACORN
atmosphericcompensation algorithm and
the
OSP
matchedfilter
75
A.9
ROC
and(1
-AFAR)
graphsfor
the
F3
target that
employedthe
ELM
atmospheric compensationalgorithm and
the
ASD
matchedfilter
76
A. 10
ROC
and(1
-AFAR)
graphsfor
the
F3 target
that
employedthe
ELM
atmospheric compensation algorithm and
the
OSP
matchedfilter
77
A. 11
ROC
and(1
-AFAR)
graphsfor
the
F3
target that
employedthe
FLAASH
atmospheric compensation algorithm and
the
ASD
matchedfilter
78
A.12 ROC
and(1
-AFAR)
graphsfor
the
F3
target
that
employedthe
FLAASH
atmospheric compensation algorithm and
the
OSP
matchedfilter
79
A.13 ROC
and(1
-AFAR)
graphsfor
the
F4
target that
employedthe
ACORN
atmospheric
compensation
algorithm andthe
ASD
matchedfilter
80
A.14 ROC
and(1
-AFAR)
graphsfor
the
F4
target that
employedthe
ACORN
atmospheric compensation algorithm
andthe
OSP
matchedfilter
81
A.15ROC
and(1
-AFAR)
graphsfor
the
F4 target that
employedthe
ELM
atmospheric compensation algorithm
andthe
ASD
matchedfilter
82
A.16 ROC
and(1
LIST OF FIGURES
A.
17
ROC
and(1
-AFAR)
graphsfor
the
F4
target that
employedthe
FLAASH
atmospheric
compensation algorithm andthe
ASD
matchedfilter
84
A.18 ROC
and(1
-AFAR)
graphsfor the F4 target
that
employedthe
FLAASH
atmospheric compensation algorithm and
the
OSP
matchedfilter
85
A.19 ROC
and(1
-AFAR)
graphsfor
the
F8
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
ASD
matchedfilter
86
A.20 ROC
and(1
-AFAR)
graphsfor
the
F8
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
OSP
matchedfilter
87
A.21 ROC
and(1
-AFAR)
graphsfor
the
F8
target that
employedthe
ELM
atmospheric compensation algorithm and
the
ASD
matchedfilter
88
A.22 ROC
and(1
-AFAR)
graphsfor
the
F8
target that
employedthe
ELM
atmospheric compensation algorithm and
the
OSP
matchedfilter
89
A.23 ROC
and(1
-AFAR)
graphsfor
the
F8
target that
employedthe
FLAASH
atmospheric compensation algorithm and
the
ASD
matchedfilter
90
A.24 ROC
and(1
-AFAR)
graphsfor
the
F8
target that
employedthe
FLAASH
atmospheric compensationalgorithm and
the
OSP
matchedfilter
91
A.25
ROC
and(1
-AFAR)
graphsfor
the
F13
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
ASD
matchedfilter
92
A.26 ROC
and(1
-AFAR)
graphsfor
the
F13
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
OSP
matchedfilter
93
A.27
ROC
and(1
-AFAR)
graphsfor
the
F13
target that
employedthe
ELM
atmospheric compensation algorithm and
the
ASD
matchedfilter
94
A.28
ROC
and(1
-AFAR)
graphsfor
the
F13
target
that
employedthe
ELM
atmospheric compensation algorithmand
the
OSP
matchedfilter
95
A.29
ROC
and(1
-AFAR)
graphsfor
the
F13
target that
employedthe
FLAASH
LIST
OF
FIGURES
A.30 ROC
and(1
-AFAR)
graphsfor
the
F13
target that
employedthe
FLAASH
atmospheric compensation algorithm and
the
OSP
matchedfilter
97
A.31 ROC
and(1
-AFAR)
graphsfor
the
VI
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
ASD
matchedfilter
98
A.32 ROC
and(1
-AFAR)
graphsfor
the
VI
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
OSP
matchedfilter
99
A.33 ROC
and(1
-AFAR)
graphsfor
the
VI
target that
employedthe
ELM
atmospheric compensation algorithm and
the
ASD
matchedfilter
100
A.34 ROC
and(1
-AFAR)
graphsfor
the
VI
target that
employedthe
ELM
atmospheric compensation algorithm and
the
OSP
matchedfilter
101
A.35
ROC
and(1
-AFAR)
graphsfor
the
VI
target that
employedthe
FLAASH
atmospheric compensation algorithm and
the
ASD
matchedfilter
102
A.36
ROC
and(1
-AFAR)
graphsfor
the
VI
target
that
employedthe
FLAASH
atmospheric compensation algorithm and
the
OSP
matchedfilter
103
A.37
ROC
and(1
-AFAR)
graphsfor
the
VF1
target
that
employedthe
ACORN
atmospheric compensation algorithm and
the
ASD
matchedfilter
104
A.38
ROC
and(1
-AFAR)
graphsfor
the
VF1
target that
employedthe
ACORN
atmospheric compensationalgorithm and
the
OSP
matchedfilter
105
A.39
ROC
and(1
-AFAR)
graphsfor
the
VF1
target that
employedthe
ELM
atmospheric compensation algorithm and
the
ASD
matchedfilter
106
A.40 ROC
and(1
-AFAR)
graphsfor
the
VF1
target that
employedthe
ELM
atmospheric compensation algorithm and
the
OSP
matchedfilter
107
A.41
ROC
and(1
-AFAR)
graphsfor
the
VF1
target that
employed
the
FLAASH
atmospheric compensation algorithm and
the
ASD
matchedfilter
108
A.42
ROC
and(1
-AFAR)
graphsfor
the
VF1
target
that
employed
the
FLAASH
10
LIST OF FIGURES
A.43 ROC
and(1
-AFAR)
graphsfor
the
VF6
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
ASD
matchedfilter
110
A.44 ROC
and(1
-AFAR)
graphsfor
the
VF6
target that
employedthe
ACORN
atmospheric compensation algorithm and
the
OSP
matchedfilter
Ill
A.45 ROC
and(1
-AFAR)
graphsfor
the
VF6
target that
employedthe
ELM
atmospheric compensation algorithm and
the
ASD
matchedfilter
112
A.46
ROC
and(1
-AFAR)
graphsfor
the
VF6
target that
employedthe
ELM
atmospheric compensation algorithm and
the
OSP
matchedfilter
113
A.47 ROC
and(1
-AFAR)
graphsfor
the
VF6
target that
employedthe
FLAASH
atmospheric compensation algorithm and
the
ASD
matchedfilter
114
A.48
ROC
and(1
-AFAR)
graphsfor
the
VF6
target that
employedthe
FLAASH
List
of
Tables
6.1
Table
ofselectedtargets
44
6.2
Number
ofbands
andtotal
percentage ofvariability
retained afterPCA
was performedonthe
atmospherically
compensatedForest Radiance I images
.45
6.3
Number
ofbands
andtotal
percentage ofvariability
retained afterMNF
was performed onthe
atmospherically
compensatedForest Radiance
I images
.46
6.4
The
number of pixels considered andthe
number of endmembers selectedusing PPI
for
eachimage
48
6.5
The
number of endmembersautomatically
selectedby
N-FINDR for
eachimage
50
7.1
Average (1
AFAR)
valuesbased
on atmospheric compensation algorithm.63
7.2
Average (1
AFAR)
valuesbased
ondimensionality/noise
reduction algorithm
for
chainsusing ELM
63
7.3
Average (1
AFAR)
valuesbased
onendmember
selection algorithmfor
chains
using ELM
andPCA
64
7.4
Average (1
AFAR)
valuesbased
onmatchedfilter
algorithm
for
chainsusing
ELM, PCA,
andN-FINDR
64
[image:16.525.66.477.214.571.2]Chapter 1
Introduction
Detection
ofknown
substances,
ortargets,
is
avery
common problemin hyperspectral
imaging
(HSI). Given
atarget
with aknown
spectralsignature,
an algorithmthat
candecide if
and wherethat
target
is
presentin
animage is
needed.In
orderto
accomplishthis,
target
detection
algorithms such as matchedfilters
have been developed
to
accentuatepixels
in
animage
that
containthe target.
HSI
canbe
thought
of astaking
animage
ofthe
same scene with numerous(normally
hundreds)
different
spectralbands. At
eachpixel,
a spectrum measuredrepresentsthe
op
tical energy
versus wavelength.These
spectra arepictorially displayed
as athird
dimension
in
Figure 1.1. Each layer in
the
cuberepresents aspectralband;
every band
containssimilarspatial
information.
There
are several unique stepsto
any
target
detection
algorithm chain.Each
ofthese
stepsplays a role
in
determining
the
overall performanceofthe target
detector. Figure
1.2
is
aflow
chartdetailing
each ofthe
more significant stepsfor
a generictarget
detection
algorithm chain.
For
eachindividual step along
the way, there
are several algorithmsthat
will return an acceptable solution.
It is
desired
to
determine
the
best
algorithmto
accomplish each step.
A
particularcombination
ofalgorithms
may
work wellfor
oneimage
ortarget
but
may
also performterribly
for
adifferent image
ortarget.
Finding
anoptimal
i_^
Chapter!
.Introduction
combination of algorithms or recipe
becomes
anintriguing
dilemma.
In
orderto
best
accomplish
this,
commonly
usedalgorithms
for
eachstep
mustbe
looked
at and comparedto
eachotherfor
many
different
types
oftargets
in
animage. Each
ofthe
stepsin
the
chainperforms a
distinct
andimportant
rolein
the
overalltarget detection
process.Known
target
spectra are
in
units ofreflectance,
sincethat
is
whatis
ableto
be
measuredin
alab
orin
the
field.
The data
collectedremotely
by
a sensoris in
units of radiance.The
difference
between
these
measurementsis
the
atmospherebetween
the
remote sensor andthe target.
If
the
atmospherewas ableto
be effectively
"removed",
the
collectedinformation
wouldbe
in
the
sameunits asthe
measuredinformation. This is
whatthe
atmospheric compensationstep
seeksto
accomplish.Hyperspectral
sensorsgenerally
collecthundreds
ofbands
worth ofinformation.
This
amount of
data
canbe
very
computationally
cumbersome or evenimpossible
to
work with.The
dimensionality
reductionstep
seeksto
decrease
the
amount ofdata
on whichto
operatewithout
removing any
pertinentinformation.
Noise is
avery
common problem withany
sensor.
Noise
canbe
removedsimultaneously
with otherunnecessary
information.
Because
of
this,
the
noise anddimensionality
reduction steps are often performedtogether.
One
way to
describe
the
background
of animage is
structured,
or geometrically.That
15
is
to
say that
a set ofbasis
vectorsis
usedto
describe
the background.
These basis
vectorsare referred
to
asendmembers.The
endmemberselectionstep
determines
that
set ofbasis
vectors.
Finally,
the
matchedfilters
arethe
mathematical operationsthat
determine the
likelihood
that
aspecific pixelcontains aknown
target
spectrum.The
following
chaptersdiscuss,
in
detail,
the
background
andtheoretical
explanationof
the
algorithms studiedin
this
effort.Results
are presentedin
the
form
ofROC
curves,
average
false
alarm rates(AFAR)
(Bajorski
etal.,
2004),
anddetection
rates at aconstant16
ChapterI.
Introduction
Image
Atmospheric Compensation
Dimensionality
/ Noise
Reduction
Preprocessed
Image
Known Target
Reflectance
Vector
Background Characterization
Endmember Selection
Covariance Calculation
Target Detection
Algorithm
Structured
Background
Matched Filter
Unstructured Background
Matched Filter
Target
Abundance
Map
Chapter
2
Atmospheric Compensation
Atmospheric
compensationis
the
process of"removing"
the
illumination
and atmospherefrom
the
image.
Often,
the
known
spectral signature ofatarget
consists of reflectance values measured
in
alab. These
measurements cannottake
into
accountthe
effects oflooking
through
thousands
offeet
of atmosphere.The
ultimate goal ofthe
atmospheric compensation
processis
to
retrieve surface reflectance valuesfrom
the
radiance values recordedby
the
sensor.Equation 2.1 is
one version ofthe
sensorreaching
radiance equation(ignoring
thermal
radiance)
presentedby
Schott
(Schott,
1997):
Lx
=[E'sX
cosa'nixf-^-+
FEdsXT-^-+
(1
-F)LbsXrd{X)]r2
+
LusX
(2.1)
where
E'sX
is
the
top
ofatmosphere solarirradiance,
a'is
the
solardeclination
anglefrom
the target
centered zaxis, n
is
the
atmospheric
transmission
ofthe
pathfrom
the
sunto
the
target,
ris
the
reflectance, F is
the
fraction
ofthe
hemisphere
abovethe target that
is
unobstructed(sky),
E^
is
the
downwelled
irradiance,
rd
is
the
diffuse
reflectance,
Lbs
is
the
reflectedbackground
radiance,
r2
is
the
atmospheric
transmission
ofthe
pathfrom
the
target to the
sensor,
Lus
is
the
upwelledradiance,
andA
denotes
the
wavelengthdependency
of
the
associatedterms.
The
terms
in
Equation
2.1
that the
atmosphere
directly
contributes
to
arethe two
pathtransmittance
terms,
n
and r2.As
canbe
seen, these two
terms
-r2
I8.
Chapter2.
Atmospheric
Compensation
in
particular - willhave
asignificant
effect onthe
overallsensorreaching
radiance.All
ofthe
factors
that
determine
the
atmosphere- watervapor,
molecularconstituents,
atmospheric
density,
etc. cansubstantially
alterthe
way
the
sametarget
looks
underdifferent
conditions.As
aresult, the
atmospherethrough
which animage
wastaken
mustbe determined
andtaken
into
account.The
simplestform
of atmospheric compensationis
the
Empirical Line
Method
(ELM). There
are several other algorithmsthat
make use ofatmospheric
inversion
principles:the
Fast
Line-of-Sight Atmospheric Analysis
ofSpectral
Hypercubes
(FLAASH)
andAtmospheric CORrection
Now
(ACORN)
aretwo
ofthe
morewidely
used atmosphericinversion
based
algorithms.These
three
methods are usedin
this
work and will
be discussed here.
2.1
Empirical Line Method
(ELM)
ELM
relies on groundtruth
inasmuch
as atleast
two
different
regionsin
the
image
(preferably
onedark
and onelight
across eachwavelength) have
aknown
reflectivity.These
regions must
be
atleast
onefully
resolved pixellarge. In
orderto
ensurethat
anuncontami-nated,
fully
resolved pixelis
available, these
regionsgenerally have
to
be
several pixelslarge
in
eachdirection.
The
regions musthave
corresponding
groundtruth
reflectancespectra,
ideally
taken
atthe
sametime
asthe
image.
If
such regions are not presentin
the
image,
an educatedguess can
be
madeby
selection of regionsfor
whichan approximate reflectancecan
be
created.For
example,
a white cloudmay
have
areflectivity
of about90%
acrossall wavelengths.
Obviously,
there
is
a greatopportunity
for
errorintroduction if
estimateshave
to
be
made,
but
that
canbe limited if
they
are made smartly.Once
the two
(or
more)
regionshave been
selected,
aline is
fit
through the
radiance(or
digital
counts)
vsreflectivity
pointsin
eachband. ELM
assumes alinear
relationship
be
tween the
radiance(or
digital counts)
andthe
reflectivity.Mathematically,
this relationship
2.2.
Atmospheric Inversion
19
L(X)
=m(A)
*r(A) +
6(A)
(2.2)
where
L is
the
observed radiance(or
digital
count),
mis
the
slope ofthe
line
through
the
ground
truth
points,
ris
the reflectance,
andb
is
the
radiance(or
digital count)
valuethat
represents zero reflectance.
All
ofthe terms
have
a wavelengthdependency,
A.
Equation
2.2 is
avery
simplifiedlinear
version ofEquation 2.1.
Figure 2.1 illustrates
this
linear
relationship
graphically.P
/
r c
f
TO
TO
/
D "0
/
as
'
1
II
/
Reflectance
Reflectance
BandX
BandY
Figure
2.1:
Graphical
representation ofELM for
two
bands.
The
marked points arethe
"ground
truth"points.
Now,
the
observed radiancein every
pixelin
the
image
canbe
convertedinto
reflectanceusing the
linear
regression coefficients(m
andb)
obtained viaEquation 2.2. It is important
to
notethat
ELM
can work withboth
radiance ordigital
counts without calibration.2.2
Atmospheric Inversion
An
alternative methodto
ELM for
calculation of atmospheric effects on animage
is
to
characterizethe
atmospherein
animage
to
make "removal" possible.There
arethree
main
factors
that,
oncedetermined,
canadequately
characterize
the
atmosphere: opticaldepth
ofthe
different
aerosol and molecularconstituents,
surface pressureelevation,
and20
Chapter2. Atmospheric
Compensation
Atmospheric
inversion
exploitsthe
unique absorptionfeatures
ofthe varying
atmospheric materials at
different
wavelengthsin
orderto
arrive atthe
opticaldepth for
the
various aerosols present
in
the
atmosphere.Figure
2.2
showsthe
absorption spectrafor
some common atmospheric molecularconstituents.
The
strength,
ordepth,
ofthese
uniquefeatures
is
usedto
determine
the
quantity
ofthe
specific molecular constituentin
the
atmosphere.
1
v
Y~*
50
0
1
2
3
4
5
6
?!
3
13
1112
13
M
Wavelength
(um)
0
12
3
4
5
8
7
I
9
13
1112
13 14
Wavelength (|imi
c
*
V0
*
CO
i
50
s
t *
<1
i r: r ,
1 , L
0
1
2
J
45
S
T
t
9
10
1112 13
14
Wavelength
(urn)
1
2
3
4
S
S
7
8
J
10 11 12
14
Wavelength
(|im)
3
1
I
3
4
i
6
1
I
%
11 11
13
Wavelength
(pm)
0
1
2
3
4
5
S
TI
3
10
11
12
13
14
Wavelength
(urn)
Figure 2.2: Absorption
spectra of several common molecular constituentsin
the
atmosphere(Schott,
1997).
The
secondfactor
that
needsto
be determined is
the
surface pressure elevation.This
allows
for
compensation of atmospheric absorptiondue
to
well mixed gasesin
the
atmosphere and
the
effects ofmolecularscattering
(Green
etal., 1993).
The
amount of oxygenis
agoodindicator
of pressuredepth. Oxygen
canbe
treated
the
sameasany
otheratmo-2.2.
Atmospheric
Inversion
21
spheric molecular
constituent,
and sothe
processfor
calculating
the
quantity
of oxygenis
the
same asfor
the
other molecularconstituents.The
absorptionfeature
of oxygen presentat w
760nm is
mostcommonly
usedin
this
process.The third,
and perhapsmostimportant,
contributorto
atmospheric characterizationis
water vapor.
The
absorption spectrumfor
wateris
givenin
Figure 2.3.
The
absorption
feature
present at940nm is commonly
usedto
determine
the
amount of water vaporpresent
in
the
atmosphere.There
are alsostrong
features
at ss1120nm
and1340nm that
could also
be
used.w*r*#vpoiAbsorptionSp*tr
Figure 2.3:
Absorption
spectrumofwater.Simulation
is
usedheavily
in this
process.MODTRAN (Berk
etal.,
2005)
is commonly
utilized
to
modelthe
absorptionfeatures for
many
different
concentrations
ofthe
varying
aerosols
in
the
atmosphere.These
simulated absorption
features
arecompared
to the
observed
feature
andthe
closest matchdetermines
the
concentration
ofthe
aerosols present
in
the
atmosphereofthe
givenimage.
The
non-linear
least
squared spectral
fit
(NLLSSF)
algorithm
(Green
etal.,
1993)
is
the
primary
determining
metricfor
matching the
modeled^2
Chapter2. Atmospheric Compensation
2.2.1
Fast Line-of-Sight
Atmospheric
Analysis
ofSpectral
Hypercubes
(FLAASH)
FLAASH is
acommercially
available atmospheric
compensation algorithmdeveloped
by
the
Air Force Research
Laboratory,
Space Vehicles Directorate
(AFRL/VS)
to
supportthe
analysis of visibleto
shortwaveinfrared
(0.4
urnto
2Aum)
hyperspectral
andmul-tispectral
sensors(Berk
etal., 2002).
Using
the
atmosphericinversion
methoddescribed
above,
FLAASH is
ableto
determine
the
aerosol and water vapor content ofthe
atmosphere
in
animage
as well asthe
surface pressure.FLAASH
wasdesigned
as a generalpurpose code
developed
in
parallel with upgradesto
MODTRAN.
Originally,
FLAASH
wasdesigned
to
work withMODTRAN4. Because
ofthis
"side-by-side"development
andup
grade,
FLAASH is
ableto
exploitthe
speed gains andaccuracy
improvements
obtainedby
ongoing improvements
to
MODTRAN.
Another
feature
presentin
FLAASH,
whichwillnot
be discussed
in
detail,
is
the
ability
to
effectively
remove cloudsfrom
animage.
This
is
done
by identifying
cloud pixelsin
the
image
andreplacing them
with average radiancevalues of
the
pixelssurrounding
the
cloud.Equation 2.3
(Berk
etal.,
2002)
is
the
sensorreaching
radiance(L*)
equation utilizedby
FLAASH
that
has
adifferent form
than
Equation 2.1
but
will returnthe
same value:L*
=
-^-+
-^
+
Ll
(2.3)
1
-peb
1
-peb
where
p is
the
pixel surface reflectance(equivalent
to
rin
Equation
2.1),
pe
is
an averagesurface reflectance
for
the
areasurrounding the
pixelin
question,
S
is
the
spherical albedoof
the
atmosphere(accounting
for
the
skylightphotons),
L*is
the
upwelledradiance,
A
andB
are surfaceindependent
coefficientsthat vary
based
onthe
atmospheric and geometricconditions.
All
ofthe
variables areimplicitly
wavelengthdependent.
The
pe
is included
to
allow
FLAASH
to take
into
accountthe
adjacency
effects ofthe surrounding
pixels onthe
pixel
in
question.2.2.
Atmospheric
Inversion
23
Once
these
valueshave
been
extracted,
Equation 2.4
is
usedto
solvefor
pe
(Berk
etal.,
2002):
L.=
(AB)^
+
K
(24)
i peJ
where L*
is
aspatially
averagedsensorreaching
radiance value.Once
pe
has
been
determined,
Equation 2.3
canbe
solvedfor
reflectance(p).
2.2.2
Atmospheric CORrection Now
(ACORN)
Like
FLAASH,
ACORN is
an atmospheric compensation algorithmthat
can modelaerosol absorption
in
the
atmospherebased
onlook-up-tables
that
are producedusing
MODTRAN4.
However,
this
algorithmis
capable ofdetermining
both
molecular andaerosolscattering
effects aswell.The
equation utilizedby
ACORN
to
representthe
sensorreaching
radiance
is
Equation 2.5
(ImSpec, 2004)
:MA)
=Fo(A)
TTTd(X)p(X)Tu(X)
Pa(A)
+
(2.5)
(1
-s(X)p(X))
J
where
Lt
is
the total
sensorreaching
radiance,
Fo
is
the
above atmospheresolarirradiance,
Td
andTu
arethe
downward
and upwardtransmittance
ofthe
atmosphere,
pa
and s arethe
upward and
downward
atmosphericreflectance, p
is
the
surface spectral reflectance andA
denotes
the
wavelengthdependency
ofthe
associatedterms.
ACORN
seeksto
solveEquation 2.5 for
the
surface reflectance value of eachpixel,
p.This
solutionis
givenin
Equation 2.6
(ImSpec, 2004)
:p(X)
=F0(X)Td(X)Tu(X)
+ S(X)
-1
(2.6)
_Lt(X) -
MhkziV
A
key
uniquefeature
ofthe
ACORN
algorithmis
full
spectralfitting
to
solvefor
the
overlap
of absorptiondue
to
water vapor andliquid
waterin
surface vegetation(Kruse,
2004).
The
outputsofthis
software package are a water vaporimage
and a scaled surfacereflectance cube.
ACORN
is commercially
available
andis
distributed
24
Chapter2. Atmospheric Compensation
2.3
Discussion
In
this
chapter,
three
different,
valid atmospheric compensationtechniques
are presented.
All
three
accomplishthe
sametask,
but
there
areinherent
differences in
the
outputof eachalgorithm.
There
are some similaritiesbetween
the way
FLAASH
accomplishesthis
and
the
way
ACORN
does,
but
they
are still quitedifferent from
each other.The
majordifferences
arethe
assumptionseach algorithm makesandthe
complexity
ofits
mathematical
operations.ACORN
is essentially
a simpler version ofFLAASH. FLAASH
takes
into
account
the
adjacency
effectsofneighboring
pixelsin its
calculation of surfacereflectance,
while
ACORN
does
nothave
this
feature.
This
alonewill causethe
outputsto
be
radically
different
from
each other.The governing
equationsfor FLAASH
(Equations
2.3
and2.4)
and
ACORN
(Equations
2.5
and2.6)
areobviously
notthe
same.Again,
this
introduces dif
ferences
in
the
outputsofthe
algorithms.Finally,
both FLAASH
andACORN
differ greatly
from
ELM
which assumes alinear
relationship
between
the
radiance values collected andsurface reflectance.
Of
allthe
stepslooked
atin
this research, the
atmospheric compensationstep
shouldhave
the
greatest effect onthe
overalltarget
detection
performance.This is
expectedbecause
this
step
actually
changesthe
values presentin
the image.
Also,
this
is
the
first
step
in
the chain,
soany
errorsintroduced
in
this
step
willbe
amplified and canpotentially
Chapter
3
Dimensionality/Noise Reduction
The
next stepsin
the target
detection
process aredimensionality
reduction and noisereduction.
Since
these
two topics
areclosely related, the
background for
them
both
canbe
discussed
simultaneously.Many
algorithmstackle
both
problems atthe
sametime.
The
needfor
noise reductionis
fairly
obvious;
as withany image
processing,
noiseinterferes
withthe
actual signal.It is
because
ofthis
interference
that the
noise shouldbe
reduced(ideally
eliminated) before
any
processing is
done
on animage.
The
needfor
dimensionality
reductionmay
notbe
asintuitive
as noise reduction.As
mentionedin
Chapter
1,
HSI
relies onup to
hundreds
of spectralbands
ofinformation.
Using
all ofthe
information
containedin
all ofthese
bands
canlead
to
dauntingly
large
data
setsthat may
be computationally
difficult
orimpossible
to
manage.Images
willcontainvarying
amountsof pertinent
information in
somebands
whilecarrying
little
or no significantinformation
in
others.Also,
it is
likely
that there
is
someinformation
that
is
redundant across severalbands
andtherefore
canbe
reducedby discarding
the
repeatedinstances.
This
canbe
exploited,
andthe
bands
containing
little
amounts ofdata
canbe discarded
reducing
the
amount of
information
to
be
operated onto
a manageablelevel.
2_^
Chapter3. Dimensionality/Noise Reduction
3.1
Principal Components Analysis
(PCA)
Perhaps
the
most commonmethod
ofdimensionality
reductionis
Principal
Components
Analysis (PCA). A
commonassumption
associated withPCA is
that
variability
equalsinformation.
Because
ofthis,
bands
withhigh
variancewilldominate
the
first few
principalcomponents.
Conversely,
bands
withlow
variancethat
may
still contain usefulinformation
will
be
mixedin
withnoisefrom
the
morevarying bands.
As
is
implied
by
the name,
PCA breaks down
the
data into its
principal components.In
orderto
do
this,
the
covariance matrixfor
the
data
mustbe
constructed.The
covariancematrix
describes
the
dependant
variability
ofthe
bands
with relationto
each other.Once
the
covariancematrix
has
been
determined,
its
eigenvectorscanbe
calculated.These
orthogonaleigenvectors areused
to
rotatethe
originaldata into
anew spacethat
exactly de-correlates
the
data.
For
the
mostpart, the
first few
principal componentbands
containthe majority
ofthe
variability in
animage. Because
ofthis,
PCA
canbe
usedto
greatly
reducethe
number ofdimensions
on whichto
operateby disregarding
the
lower PCA bands. Figure 3.1
shows asimple example of
PCA
performed on a sixband
scene ofRochester,
NY
wherethe
sixPCA
bands
aredisplayed.
There is
no "right"way
ofdetermining
the
number ofPCA
bands
to
keep
for
animage.
The
amount of variation maintained mustbe
weighed againstthe
computational
complexity
ofkeeping
a number ofPCA bands. For
the
examplein Figure
3.1,
if only
the
first four
bands
werekept,
99.33%
ofthe variability
is
maintained.This
is
enoughto
effectively
reducethe
dimensionality
withoutgreatly altering
the
amount ofinformation
on whichto
operate.3.2
Maximum
Noise Fraction
(MNF)
A
second algorithmthat
reducesdimensionality,
the
Maximum
Noise
Fraction
(MNF)
3.2.
Maximum
Xoise Fraction
(MNF)
27
(5S
55)
(7
28)
(32
54)
(0.59)
(0
03)
Figure 3.1: Principal
componentimages from
asixband
image
ofRochester,
NY. Percentage
28
Chapter3. Dimensionality/Noise
Reduction
Essentially,
the
MNF
algorithmis the
same asthe
PCA
processwith some "pre-processing"steps added.
For the MNF
transform,
the
covariance matrixofthe
noisepresentis
needed.One
way to
obtainthis
in-scene
(if
it is
notknown)
is
by locating
aradiometrically
flat
field. Once
aflat field
is
identified
within animage,
the
mean canbe
subtractedfrom
the
observed valuesof
that
field. The
resultis
arepresentationofthe
noisepresentin
the
image.
Once
this
"noise
image"is
found,
its
covariance matrix canbe
calculated.The
nextstep in
this
processis
basically
to
performPCA
onthe
noiseimage
to
de-correlate
the
noise.This is
done
by
calculating
the
eigenvectors ofthe
noiseimage.
By
definition,
the
resulting
eigenvectors are orthogonalto
each other.The
originalimage
cannow
be "passed
through"this
orthogonaltransformation.
After
this
is
done,
the
orthog
onally
transformed
image
canbe
whitened,
ornormalized,
by
the
eigenvalues ofthe
noisecovariance matrix.
The
final
result of allthese
stepsis
animage in
which all ofthe
noisepresent
is
orthogonal andidentical.
Now,
the
PCA previously described
canbe
performed.The
advantage ofthe
MNF
transform
is
that the
"pre-processing"steps
force
the
assumption used
in PCA
of variancerepresenting information
to
be
true.
There is
now equalvariance present
due
to
noisein
the
image.
The bands
are rank orderedby
the
signalto
noiseratios and
the
highest PC bands
are retained.The
resultis
agreatly
reduceddimension
spacewith
little
noiseto
interfere
withtarget
detection.
3.3
Discussion
As
described
above, the
processinvolved in both PCA
andMNF is
very similar,
however,
the
results willbe
dramatically
different.
This difference
stemsfrom
the
fact
that
MNF
usesthe
eigenvectorsfrom
adifferent
matrixto
performthe
rotationin
aneffortto
reduce noise.Calculation
ofthe
eigenvectors andthe
actual rotations are rathertrivial
mathematicaloperations.
Neither PCA
norMNF
changethe
amount ofinformation
presentin
the
data.
However,
in
orderto
reducedimensionality,
some ofthe
lower
componentshave
to
be
thrown
3.3.
Discussion
29
removed
is
noise(as
is
the
goal ofMNF),
the
overall performance ofthe
algorithm chaincan
improve.
Conversely,
if
the
removedPC
bands
contain some pertinentdata,
the
overallperformanceof
the
algorithm chain canbe
greatly
degraded.
If
the
noiseimage"
does
not characterizethe
noise presentin
the
image
well,
the
eigenvectors
derived
will not rotatethe
data into
a spacethat
is
orthogonalto the true
noise
in
the
image.
What
willendup
happening
is
the
data
willbe
rotatedinto
a spacethat
is
orthogonalto
some ofthe
pertinentinformation
causing
poorinformation
to
be
passed on
to the
nextstep
in
the
chain.Another
situationthat
willhinder
the
ability
ofMNF
to
improve
the
overall algorithmchain,
is
there
being
very
little
noisein
animage
to
begin
with.Extremely
low
noiseis
very
difficult
to
characterize well.The
algorithmfor
this step that
is
expectedto
mostgreatly improve
the
detection
resultsis
the
"none" case.This is due
to the
fact
that
noinformation is
being
removedfrom
the
original
image.
By
performing PCA
orMNF,
that
sheer amount ofdata is
reducedto
apoint where
it is
much moremanageablecomputationally.Clearly,
there
is
atrade
offhere,
however
this
aspect will notbe
discussed
in
detail in
this
research.The
focus
is solely
onChapter
4
Endmember Selection
There
aretwo
overarching
waysto
characterizethe
background
of animage:
structuredor unstructured.
A
structuredbackground
is
onethat
is
defined
by
a set ofbasis
vectors.This
set ofbasis
vectors,
orendmembers,
completely defines every
non-target pixelin
animage,
in
theory.
An
unstructuredbackground
is
defined
statistically, normally
by
a covariance or correlation matrix.
While
abackground independent
matchedfilter,
the
Spectral
Angle Mapper
(SAM),
and an unstructured matchedfilter,
the
generalizedlikelihood
ratiotest
(GLRT),
were usedin
determining
the
targets,
this
researchfocuses
on matchedfilters
that employ
astructuredbackground.
All
targets
fall into
two very
broad
categories: resolved and unresolved.A
fully
resolvedtarget
is
onethat
fills
atleast
one entire pixelin
animage.
An
unresolvedtarget
is
onethat
does
notfully
fill
a pixel.For
targets that
areunresolved, it
becomes
necessary
to
determine
the
constituents of each pixel whenusing
astructured
background
model.In
order
to
accomplishthis,
each pixelmustbe
represented asacombinationofits
components(or
endmembers).A
commonrepresentation,
known
asthe
linear
mixing
model(LMM),
for
a mixed pixelis
shownin
Equation
4.1:
L
=EF
(4.1)
32
Chapter4.
Endmember
Selection
where
L is the
radiancevectorofthe pixel, E is
the
endmembermatrix,
andF is
the
vectorofunknown endmember
fractions. This
representationis
based
onthe
assumptionthat
eachpixel
is
alinear
combination ofthe
image
endmembers.Every
pixelin
animage,
whetherit
containstarget
ornot,
canbe
representedusing
the
LMM.
However,
the accuracy
is
determined
by
how
wellthe
set of endmembers characterizesthe
scene.In
orderto
enablethe
matchedfilters
to
properly
suppressthe
background in
anim
age, the
background
mustfirst
be
wellcharacterized.This is
accomplishedby
deriving
the
endmembersused
to
define
the
background
pixels.In
theory,
the
background is
fully
characterized
by
a matrixconsisting
of allthe
endmembersthat
mixto
define
all non-targetsignals present
in
the
image.
This
would represent anideal
situationthat
would resultin
endmember matrices
that
couldbe
almost aslarge
asthe
image itself
andrendering the
matched
filters
nearly
too
computationally
cumbersometo
use.In
practice,
severalend-members are used
to
representthe
entirebackground. There
are severaldifferent
methodsof
eliciting
these
endmembersdirectly
from
animage,
three
willbe discussed here:
PPI,
MAXD,
andN-FINDR.
4.1
Pixel
Purity
Index
(PPI)
The first
endmember selection algorithmis
the
Pixel
Purity
Index
(PPI)
method(Board-manet
al, 1995).
Using PPI,
all ofthe
pixel valuesin
animage
are projected ontorandomly
selected vectors.
Each
time
a projectionis
accomplished,
the
extreme points are noted.Spectrally
pure pixels willconsistently
be
extreme points ofthese
random projections.A
major assumption of
this
methodis
that spectrally
pure pixels(which
areendmembers)
are present
in
the image.
This is
generally
a good assumption.This
methodis
also rathersusceptible
to noise,
so steps{e.g.
thresholding)
shouldbe
taken to
help
lessen
the
negative4.2.
MAXD
33
4.2
MAXD
The
second endmember selectiontechnique
is MAXD
(Lee,
2004).
Similar
to
PPI,
MAXD
also uses projectionto
help
sort outthe
endmembers of animage.
Given
a set ofdata
points,
MAXD begins
by
selecting the
pointsthat
have
the
maximum and minimumEuclidean
distance from
the
origin.These
two
points arethe
first
two
endmembers.Once
these
points areselected,
all ofthe
data
points are projected onto a vector orthogonalto
the
difference
vectorbetween
the
first two,
andthe
pixelthe
maximumdistance from
the
common point projection of
the
first
two
is
selectedasthe
next endmember.This
processis
repeated until
the
desired
number of endmembersis found. Figure 4.2
pictorially
explainshow
this
process works.4.3
N-FINDR
Another
method ofdetermining
endmembersin
animage is
N-FINDR
(Winter,
1999).
This
method againlooks for
extrema pointsin
the
data
set.The
set ofdata
pointsfor
an
image in
N-dimensional
space canbe
thought
of as aconvex-hull,
where one moreo
CO
,
BandX
34
Chapter4.
Endmember Selection
endmember
than
dimensions
is
neededto
make aclosed convexhull. For
example,
given animage
withtwo
bands
(dimensions),
three
endmembersform
atriangle
as a closed convexhull
(Figure
4.3).
This
algorithm wasoriginally
packagedfor
usein
unmixing
pixelsin
an
image
as opposedto target
detection.
However,
both
processes require endmembersto
be
elicitedfrom
the
image
first. Because
ofthis overlap,
N-FINDR is
ableto
be
usedfor
background
characterizationdue
to
its ability
to
returnthe
spectra of allthe
endmembersit
usesto
unmix animage.
N-FINDR
assumesthat
spectrally
pure pixels can represent endmembers.Clusters
of[
.anto-tctisiaiitc/
*,^.
.
.Smallest
distance
'
\
ft K
Figure 4.2: MAXD
endmember selection algorithm(Lee,
2004).
3
2
.BandX
4.3.
X-FINDR
35
pixelsaround
the
areaofa "point" onthe
convexhull,
suchasthe
clusterslabeled
1,
2,
and3 in Figure
4.3,
areindications
ofspectrally
pure pixels.Spectrally
mixed pixelsgenerally
appear
between
the
purepixels,
sometimes outside ofthe
convexhull,
and are recognized as non-endmembersby
N-FINDR.
As
astarting
point,
N-FINDR
randomly
selects agroup
of pixels(automatically
deter
mined
by
a statistical analysis ofthe
image
(Senna
Consulting,
2004))
sothat
a convexhull
canbe formed.
Once
these
pointshave
been chosen,
the
volume ofthe
convexhull
is
computed.
This
is
repeated untilevery
possible combination of pointsthat
couldform
aconvex
hull has been
used andhas
a volume associated withit.
The
set of pointsresulting
in
the
largest
volumeis
then
selected asthe
end members.Figure 4.4 graphically
showsthe
maximum volume convex
hull
selectedfor
atwo
band image.
c
CO
CD
Endmember b
Endmember
aShade
pointBand
Figure
4.4:
Maximum
volume convexhull
for
atwo
band image
(Senna
Consulting,
2004).
This
algorithmis
alsovery
sensitiveto
noise.So,
as withPPI
andMAXD,
steps need36
Chapter4. Endmember Selection
4.4
Discussion
The
ultimate goal ofthis step in the
algorithm chainis
to
characterizethe
background
ofan
image
by determining
aset abasis
vectors representativeofthe
background.
All
three
of