APPLICATION OF XY TABLE CONTINUOUS MOTION
PROGRAMMING WITH PC BASED CONTROL
ANBALAGAN A/L MUNUSAMY
UNIVERSITI TEKNIKAL MALAYSIA MELAKA
APPLICATION OF XY TABLE CONTINUOUS MOTION
PROGRAMMING WITH PC BASED CONTROL
This report submitted in accordance with the requirements of the Universiti
Teknikal Malaysia Melaka (UTeM) for the Bachelor Degree of Manufacturing
Engineering (Robotics & Automation) with Honours.
by
ANBALAGAN A/L MUNUSAMY
FACULTY OF MANUFACTURING ENGINEERING
UNIVERSITI TEKNIKAL MALAYSIA MELAKA
BORANG PENGESAHAN STATUS LAPORAN PSM
JUDUL:
Application of XY Table Continuous Motion Programming With PC Based Control
SESI PENGAJIAN: Semester 2 2008/2009
Saya Anbalagan A/L Munusamy mengaku membenarkan laporan PSM / tesis (Sarjana Muda) ini disimpan di Perpustakaan Universiti Teknikal Malaysia Melaka (UTeM) dengan syarat-syarat kegunaan seperti berikut:
1. Laporan PSM / tesis adalah hak milik Universiti Teknikal Malaysia Melaka dan penulis.
2. Perpustakaan Universiti Teknikal Malaysia Melaka dibenarkan membuat salinan untuk tujuan pengajian sahaja dengan izin penulis.
3. Perpustakaan dibenarkan membuat salinan laporan PSM / tesis ini sebagai bahan pertukaran antara institusi pengajian tinggi.
4. *Sila tandakan (√)
SULIT
TERHAD
TIDAK TERHAD
(Mengandungi maklumat yang berdarjah keselamatan atau kepentingan Malaysia yang termaktub di dalam AKTA RAHSIA RASMI 1972)
(Mengandungi maklumat TERHAD yang telah ditentukan oleh organisasi/badan di mana penyelidikan dijalankan)
(TANDATANGAN PENULIS) Alamat Tetap:
B170, Jalan Permai Bistari 7/1, Taman Permai Bistari,
08100 Sungai Lalang, Kedah Darul Aman.
Tarikh: 16 April 2009
(TANDATANGAN PENYELIA)
Cop Rasmi:
Tarikh: 16 April 2009
DECLARATION
I hereby, declared this report entitled “APPLICATION OF XY TABLE
CONTINUOUS MOTION PROGRAMMING WITH PC BASED CONTROL” is
the results of my own research except as cited in the reference.
Signature :
Author’s Name : ANBALAGAN A/L MUNUSAMY
APPROVAL
This report is submitted to the Faculty of Manufacturing Engineering of UTeM as a
partial fulfillment of the requirements for the degree of Bachelor of Manufacturing
Engineering (Robotics and Automation) with Honours. The member of the
supervisory committee is as follow:
(Signature of Supervisor)
……….
i
ABSTRACT
The project of application of XY table continuous motion programming with PC
based control is divided in two parts. First part of the project is about proposal and
the second part is about project implementation. The application of XY table
continuous motion programming with PC based control studied and investigated in
this project as an improvement of previous research in order to enable the XY table
for continuous motion. Further up, for high precision operation automation system
the current two axis system is inadequate. Thus the third axis called Z-axis should be
designed and added to the current XY positioning system. The continuous motion
programming with the third axis may solve the current XY positioning system
limitations in order to meet the current industrial automation requirements. This
project is will be conducted to modify the current design, improve the current system
in term of flow of programming method and mechanical structure. Finally a
comprehensive report produced to conclude the findings and results obtained by the
ii
ABSTRAK
Projek aplikasi pengaturcaraan pergerakan berterusan meja XY dengan kawalan
berasaskan komputer peribadi dibahagikan kepada dua bahagian. Bahagian pertama
projek ini berkenaan dengan cadangan dan bahagian kedua adalah berkenaan dengan
pelaksanaan projek. Dalam projek ini, aplikasi pengaturcaraan pergerakan
berterusan meja XY dengan kawalan berasaskan komputer peribadi dikaji dan
diselidik sebagai satu penambahbaikkan daripada kajian terdahulu bagi
membolehkan pergerakkan berterusan meja XY tersebut. Tambahan lagi, sistem dua
paksi yang sedia ada tidak memadai untuk sistem automasi operasi ketepatan tinggi.
Oleh itu, satu paksi ketiga yang dinamakan paksi-Z perlu direkabentuk dan
ditambahkan kepada sistem kedudukan yang sedia ada. Pengaturcaraan pergerakan
berterusan dengan penambahan paksi-Z boleh menyelesaikan kekurangan yang ada
pada sistem kedudukan XY yang sedia ada bagi memenuhi permintaan automasi
industri pada masa ini. Projek ini akan dijalankan untuk menambahbaik rekabentuk
pada masa ini, untuk memperbaiki system yang sedia ada dari segi kaedah aliran
pengaturcaraan dan struktur mekanikal. Akhir sekali, satu laporan yang lengkap
dihasilkan untuk merumuskan penemuan dan keputusan yang dicapai daripada
iii
DEDICATION
iv
ACKNOWLEDGEMENTS
It gives me utmost pleasure to express my gratitude to who have directly or indirectly
contributed to the fruition of the compilation. They include;
My supervising lecturer, Mr. Shariman bin Abdullah of which we had a excellent
working relationship, and who offered tremendous help and encouragement,
My examiner Mr. Zamberi bin Jamaludin, who provide me adequate ideas to
complete this project,
My family, who inspired me weather through the storm and carry on,
and last but not least
v
TABLE OF CONTENTS
Abstract……….……….i
Abstrak……….……….ii
Dedication………iii
Acknowledgement………...…iv
Table of Contents……….………....………….…v
List of Tables……….………viii
List of Figures………...…...ix
List of Abbreviations………..……….…xi
1 INTRODUCTION 1
1.1 1.2 1.3 1.4 Background Problem Statement
Scope of Project
Objectives
1
2
2
3
2 LITERATURE REVIEW 4
2.1 2.1.1 2.2 2.2.1 2.2.1.1 2.2.1.2 2.2.1.3 2.2.1.4 2.3 2.3.1 2.3.2 2.3.3 XY Table
Definition of Specifications
Drive Mechanism
Electrical Motor
AC Servo Motor
Stepper Motor
Lead Screws
Ball screws
PC-based Control
PLC versus PC
Benefits of using PC-based control
Control System Architecture
vi 2.3.4 2.3.5 2.3.5.1 2.3.6 2.4 2.5 User Interface Motion Controller
Specifications of PCI-8164 Motion Control Card
Control Algorithms
State-of-Art on XY Table Positioning System
Summary 33 34 36 38 39 43
3 METHODOLOGY 45
3.1 3.2 3.3 3.4 3.5 3.5.1 3.6
Methodology Flow Chart
Description of Methodology Flow Chart
Gantt Chart
Description of Design Improvement
Description of Motion Control Programming
User Interface
Project tools and equipments
45 47 49 50 52 52 53
4 DESIGN AND DEVELOPMENT 54
4.1 4.1.1 4.1.2 4.2 4.3 4.3.1 4.3.2 4.3.3 4.3.4 4.3.5 4.4 4.4.1 4.4.2 4.4.3 4.5 4.6 Mechanical Design
List of Parts
Descriptions of the Structure of the Z-axis
Material Selection for the Components of the Z-axis
Development of Z-axis
Back Plate
Bottom Plate
Pen Gripper Unit
Linear Slider Unit
Slider Shaft
Pneumatic Drive Mechanism
Double Acting Cylinder
Directional Control Valve
Pressure Supply
Assembly of the Z-axis Components.
vii
4.7 Motion Control Programming 70
5 RESULTS 72
6 DISCUSSION AND SUGGESTION 79
6.1
6.2
6.3
Project Overview
Result Discussion
Suggestions
79
80
81
7 CONCLUSION 82
REFERENCES 83
APPENDICES
A Detailed drawings of Z-axis Parts
B CN2 Main Connector Pin Assignments
C General-purpose Signal SVON
viii
LIST OF TABLES
3.1
4.1
4.2
4.3
4.4
4.5
Gantt chart for the project PSM 1 and PSM 2
Part List for Z-axis
Material Properties of Aluminum
Material, Mass and Volume of Z-axis Components
Cylinder Specifications
SVON Axis and pin number
49
56
58
59
65
ix
LIST OF FIGURES
2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 2.10 2.11 2.12 2.13 2.14 2.15 2.16 2.17 3.1 3.2 3.3 3.4 4.1 4.2
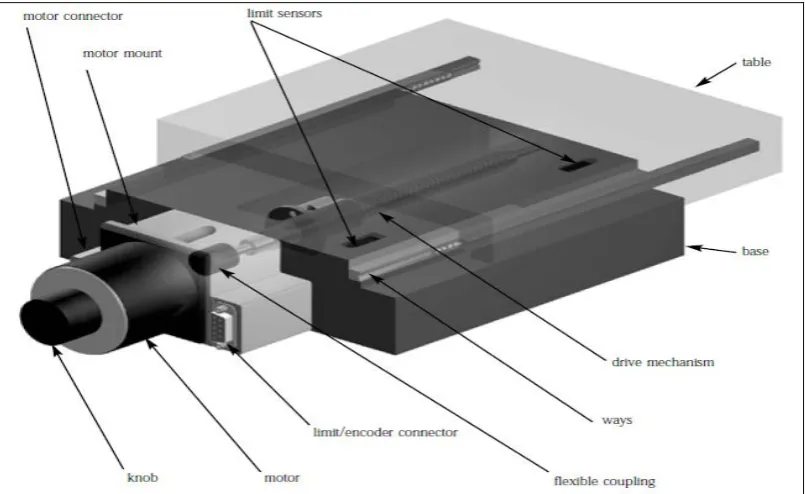
Main components of XY table
XY table
Specifications of XY table
Application requirement terms of XY positioning
Graph of efficiency vs. speed curves
Omron AC Servo motor
Typical PM servo motors.
Typical servo motor system with either encoder or resolver
feedback.
Rotary encoder components and absolute rotary encoder code
Lead screw drive system
Lead screw kinematic motion
Ball screw drive system
Two types of PC-based control system architecture.
Flow of motion control system
XY table user interface
Detailed diagram of Type 2 architecture
General layout diagram of the PCI-8164
Methodology flow chart
Initial drafting of Z-axis pneumatic slider
Initial drafting of Z-axis lead screw mechanism
Example of XY positioning user interface
Complete 3D design of Z-axis
Gripper unit with marker pen
x 4.3 4.4 4.5 4.6 4.7 4.8 4.9 4.10 4.11 4.12 4.13 4.14 4.15 4.16 4.17 4.18 4.19 4.20 4.21 4.22 5.1 5.2 5.3 6.1
Design of Back Plate
Fabrication process of Back Plate
Fabricated Back Plate
Design of Bottom Plate
Fabrication process of Bottom Plate
Fabricated Bottom Plate
Design of Pen Gripper Unit parts
Fabrication process of Pen Gripper Unit parts
Fabricated Pen Gripper Unit parts
Linear slider unit
Slider shaft
Double acting cylinder
Solenoid valve
FRL unit
Main air supply port
Completed Z-axis
Output circuit for the SVON signal
Solenoid valve wire connection
User interface for XY table
Solenoid valve signal light
The load to the cylinder of XY table
The force exerted by cylinder during extension
The force exerted by cylinder during retraction
The improvement done on the XY table
xi
LIST OF ABBREVIATIONS, SYMBOLS, SPECIALIZED
NOMENCLATURE
AC - Alternative current
ASIC - Application-specific integrated circuit
bps - Bytes per second
CAD - Computer Aided Design
CAM - Computer Aided Manufacturing
CLU - Control-loop-unit
CNC - Computer Numerical Control
CPU - Central processing unit
DC - Direct current
DOF - Degree of freedom
DPU - Data-processing-unit
FIFO - First In, First Out
FKP - Fakulti Kejuruteraan Pembuatan
FRL - Filter, regulator and lubricator
HP - Horse power
I/O - Input and output
IT - Information Technology
KE - Kinetic energy
LED - Light emitting diode
MCU - Machine Control Unit
MV - Motor voltage
PC - Personal Computer
PLC - Programmable Logical Controller
PM - Permanent magnet
xii RPM - revolution per minute
SCADA - Supervisory Control and Data Acquisition
Servo - Servo motor
SOL - Solenoid
SVON - General-purposed digital output pin
VB.NET - Microsoft Visual Basic.NET
% - Percent
e.g. - For example
etc - and others
µ - Coefficient of Friction
rps - Revolutions per second
g - gram
mm - millimeter
N - Newton
F - Force
MPa - Mega Pascal
p - Pitch
l - Lead
∆θ - Rotational displacement ∆x - Translational displacement
N - Net gear ratio
Nls - Effective gear ratio
Jeff - Rotary inertia seen at the input shaft
Wl - Weight of the load
Fl - Load force
1
CHAPTER 1
INTRODUCTION
1.1 Background
There are several motivating factors for this particular choice of a project.
Programmable coordinate positioning systems employing motor controls have
diverse applications and are extensively used in areas where precision linear and or,
non-linear traversals are required. These precision machines are widely used in many
modern manufacturing processes; a large proportion of these machines require the
accurate positioning of some sort of tools or probes with respect to a work piece.
There are multitudes of different manipulators that find themselves attached to the
XY positioning rails. Some of which include, lenses for microscope applications,
laser heads, plotter heads, plasma cutting heads, robotic grippers for placement of
parts, and general robotic manipulation instruments that need latitude and longitude
positioning. Moreover, the design and integration of a linear positioning system
employs knowledge in the areas of software and hardware design, control systems
and power electronics.
However, controlling the XY coordinate positioning system has become a
challenging task for engineers for maintaining the accuracy of motion and in
reducing subsequent errors in this position. Hence they have introduced the
positioning control system which controlled via computers. So, the application of XY
table continuous motion programming with PC based control studied and
2
1.2 Problem Statement
The surface area of the XY table can move horizontal or vertical towards X-axis and
Y-axis to perform the programmed task. With the existing XY table, an object such as
workpiece or tool for machining application can be hold in a fix position. However
this system restricts the operation for continuous motion when the positions of the
tool or workpiece have to change. So, the tool or workpiece have to move along
Z-axis in order to acquire continuous motion. Since there is no movable Z-Z-axis in the
current XY table, it has been a significant limitation in PC based positioning control
system. In order to meet the current industrial requirement of automation application
continuous motion programming is necessitated. Furthermore, for high precision
operation automation system the current two axes are inadequate. Thus the third axis
called Z-axis should be designed and added to the current XY positioning system.
The continuous motion programming and the third axis may solve the current XY
positioning system limitations in order to meet the current industrial automation
requirements.
1.3 Scope of Project
Current XY table positioning system have two axes that can move horizontal or
vertical towards X-axis and Y-axis to perform the programmed task .This mechanism
operates in a single mode motion programming system. Therefore, this project is will
be conducted to modify the current design, improve the current design in term of
flow of programming method and mechanical structure. The research in this project
is focused on application of XY table continuous motion programming with PC
based control system. A technically improvised mechanical structure of the XY table
3
1.4 Objectives
The main objectives of this final year project include:-
(a) To design the mechanical structure of the Z-axis
(b) To apply continuous motion programming in current XY table
(c) To improve the current XY table in term of flow of programming method
4
CHAPTER 2
LITERATURE REVIEW
This chapter discusses about literature discourse and review of the application of XY
table continuous motion programming with PC based control. Throughout the world,
there have been many researches about the concept, designs and implementation of
many types of XY table positioning system.
2.1 XY Table
In XY table, the X-axis and Y-axis are movable axes and can hold workpiece or tool
for machining application. XY tables usually contain motor mounting plates,
couplings, lead screws, and a large base and top plate. An XY table is made up of
two elements which are a forcer and a platen. The forcer glides over the platen on
frictionless air bearings and moves continuously in a linear motion across the platen.
This action occurs due to linear motoring modules, typically between two and four,
responding to currents. Variations among XY tables include the ways and the drive
mechanism. The ways determine load capacity, straight-line accuracy, and stiffness,
while the drive mechanisms determine smoothness and speed. Other factors
imperative to XY tables are the accuracy, repeatability, and resolution required, as
well as the appropriate motor for the application and whether or not an encoder is
needed. The example applications of an XY table include CNC machining, milling
and welding. All these applications involve automated positioning for time saving
and reducing human error. The positioning is mostly controlled by PLC, CNC
5
Figure 2.1: Main components of XY table
(Source:Danaher Precision Systems Product Catalogue)
The XY table consists of a travel mechanism, bearings, drive mechanism, motor and
motor driver (Hi-Dong Chai, 1998). Figure 2.1 shows the typical components of XY
table such as motor, limit sensors, drive mechanism, table, flexible coupling and
other components. The characteristics and advantages depend on its appearance of
XY table and the body frame of XY table.
[image:22.595.119.522.90.337.2] [image:22.595.202.437.509.685.2]6
The XY table studied in this project shown in Figure 2.2. The travel distance of this
table designed as 1000mm along X-axis and Y-axis respectively. The top plane of
the XY of the XY table designed with rows of steel bars so that the workpiece can be
clamped. Thus, a variety size of workpiece can be applied for the operation. Each
axis consists of two shafts, which are made of steel with these shafts act as guide rail
to make a smooth movement and prevention from a vibration. Beside that on the
below side of the body of XY table consists of four rollers. With rollers, the XY table
is flexible to be moved or placed. Furthermore, this allows easy loading and
uploading.
XY tables are most often mounted horizontally. Depending on the specifications, XY
tables may also be used in microelectronics assembly, laser machining, and factory
automation. The top table can be positioned with high precision and moved at high
acceleration and deceleration. The present invention relates to an XY table which is
used as a positioning table in semiconductor assembling equipment, machine tools,
measurement equipment, etc (Takeo Suzuki,1998).
Otherwise, an automatic XY table used motor to control motion of table surface can
be selected if complex project required a precise and skilled movement of the table.
This is the other option of moving XY table surface, instead of doing it manually by
turning levers. A machine can move table surface on a precise path since it can hook
up to computer and the path is programmable. Data input is key in and then the work
can be proceeding easily. Hooking up XY table this way can be very effective when
looking for a very accurate and precise finish product. There are different ways for
XY table built or used to fulfill and fit the requirements of the users.
The standard XY table is usually designed and built from heavy-duty steels including
stainless and are meant to last for many years with nominal maintenance. Most XY
table working surface are built for toughness in design to get a more rigidity and
stressed relieved for minimal environmental effect. Precision rails and bearing blocks
are used to give an accurate and repeatable operation. Most basic XY table is
accurate. When working on a delicate project vibration need to be concern, thus,
7
equipped with proper tools, which combined high precision, high speed and low
settling time is regularly been selected to carry out the desired work (Kallmeyer, M.
et al., 1998).
Moreover, an invention of XY table relates to an improved XY table. A plate or the
like is cut along imaginary line or a marked line. For example, a thick iron plate cut
by a gas torch or plasma torch. The cutting operation may be manual or automatic. It
is, however, not easy to handle a heavy iron plate. In addition, a large iron plate
cannot be easily cut by a reasonable size of cutting machine (Chen, M. F. et al.,
2007).
The objective of this invention is to provide an XY table, which can be easily moved
to a desired position for various operations. Specifically, this invention includes an
XY table for processing an object such as an iron plate comprising a frame having an
opened formed. Thereby, a moving member moving in an X-axis and Y-axis at a
right angle to the X-axis, a head for cutting, marking or machining attached to the
moving means for processing the object through the opening, and a setting
mechanism for detachably setting the frame to the object.
There are a number of selections to make when choosing a motorized XY table. The
major components should be considered when choosing XY table are the following
(Hussain Z. Tameem, 1999):-
• load capacity • stiffness
• straight-line accuracy
• the drive mechanism which determines speed and smoothness • accuracy
• repeatability • resolution