Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
6-2006
Real time face matching with multiple cameras
using principal component analysis
Andrew Mullen
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please [email protected].
Recommended Citation
Real Time Face Matching With Multiple Cameras Using
Principal Component Analysis
by
Andrew Mullen
A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of
Master of Science in Computer Engineering
Approved By:
Supervised by
Dr. Andreas Savakis
Department of Computer Engineering
Kate Gleason College of Engineering
Rochester Institute of Technology
Rochester, NY
June 2006
Andreas Savakis
Dr. Andreas Savakis - Professor and Department Head
Primary Advisor - R.I T Dept. of Computer Engineering
Shanchieh Jay Yang
Dr. Shanchieh Jay Yang - Assistant Professor
Secondary Advisor - R.I T Dept
.
of Computer Engineering
M.Shaaban
Thesis Release Permission Form
Rochester Institute of Technology
Kate Gleason College of Engineering
Title: Real Time Face Matching with Multiple Cameras Using Principal
Component Analysis
I, Andrew Mullen, hereby grant permission to the Wallace Memorial Library to
reproduce my thesis
in
whole or part.
Andy Mullen
Andrew Mullen
Acknowledgements
Iwouldliketo expressmysincere appreciationtoDr.
AndreasSavakis for hisguidance and encouragement. His
constant interest helpedat everystage toenablethis thesis
tobecompleted.
I amalso gratefultoDr. Shanchieh
Yang
andDr.Muhammad Shaabanfortheircontinualsupportand efforts
toallowmeto overcome obstacles.
Otherpeoplewho provided significant assistance were
Abstract
Face recognitionis arapidly advancing researchtopic due to the largenumberof
applications that can
benefit
from it. Facerecognitionconsists ofdetermining
whetheraknown face ispresent inanimageandis
typically
composedoffour distinctsteps. Thesesteps are face
detection,
face alignment, feature extraction, and face classification [1].The
leading
application for face recognition is video surveillance. The majority ofcurrent research in face recognitionhas focusedon
determining
ifaface is present inanimage,
and ifso, which subject in aknown database is the closest match. This Thesisdeals with face matching, which is a subset of face recognition,
focusing
on faceidentification,
yetit is an area where littleresearchhas been done. Theobjective offacematching is to
determine,
in real-time, the degree ofconfidence to which a live subjectmatches a facial image. Applications for face matching include video surveillance,
determination of identification credentials, computer-human
interfaces,
andcommunicationssecurity.
The method proposedhere employs principal component analysis
[16]
to create amethod of face matching which is both computationally efficient and accurate. This
method is integrated into a realtime systemthat is basedupon atwo camera setup. It is
able to scan the room, detect
faces,
and zoom in for ahigh quality capture ofthe facialfeatures. The image captureisused inaface matchingprocess todetermine iftheperson
found is the desired target. The performance ofthe system is analyzed based upon the
Table
ofContents
Acknowledgements in
Abstract iv
TableofContents V
ListofFigures vii
ListofTables X
Glossary
xi1 .0 Introduction 1
1 .1 Motivation 3
1 .2 Problem Statement 4
1 .3 Outline 6
2.0 Background 7
2.1 Current Researchin Video Face Recognition 8
2.2
Key
Attributes oftheFace Detection Algorithm 92.3 Face Identification Strategies 10
2.4
Key
Attributes oftheFace Classification Algorithm 132.5 Face Recognition Strategies 14
2.6 In Depth LookatPCA 17
3.0 PCA Implementation 23
3.1 Source Images 23
3.2 PCAAlgorithm 25
3.2.1 Difficulties 27
3 .2.2 Limitations 28
3.3 DistanceMeasure Implementationand
Testing
293.4 DistanceMeasure ResultsandSelection 32
3.5 Eigenfaces 33
4.0 EvaluationofPrincipal Component Analysis 37
4.1 Data Gathered 37
4.1.1 Image SizeandNormalization Method 38
4.1.2 NumberofEigenfaces 41
4.1.3 NumberofImagesper Subject 43
4.1 .4 NumberofSubjectsfor
Training
444.1.5 EvaluationoftheFirst Three Eigenfaces 45
4.1.6 EvaluationofImage Masks 46
5.0 Face
Matching
555.1
Thresholds
andCharacteristics 566.0 Real Time System 60
6.1
Components
616.1.1 GUI 61
6.1.2 Camera 70
6.1.3 Frame 75
6.1.4 Face 76
6.1 .5 Eigenspace 81
6.1.6
Tracking
816.1.7 Threads 82
6.2 DataPath 84
6.3 Integration 85
6.4 OpenCV 86
6.5 IncreasedPrecision Eigenfaces 87
6.5.1 Eigenspace Evaluation 90
7.0 Evaluation 92
7.1 Initial Test 92
7.2 Second Test 96
7.2.1 InclusionofSubject
Tracking
1017.2.2 Confidence Levels 102
7.3 Digital CameraImages 108
7.4 SystemSpeed 110
7.5 System Limitations 113
8.0 Conclusion 115
8.1 Future Work 116
9.0 AppendixA 118
List
ofFigures
Figure 1 - Skin Tone
Concentrationin HSV Colorspace 10
Figure 2
-Average FaceTemplate& EdgeTemplate
[10]
11Figure 3
-SVM
Classifying
Model 12Figure 4- Face
Rotations , 14
Figure 5 - Eigenface Creation Flowchart 25
Figure6 - Distance Metric
Testing
Results 33Figure 7
-Average Face 34
Figure 8
-The First Five Eigenfaces 35
Figure 9
-Eigenfaces 50 &
51,
100 &101,
and 150 36Figure 10- NormalizationTest 1 39
Figure 11 - NormalizationTest 2 39
Figure 12- Normalization Test 3 40
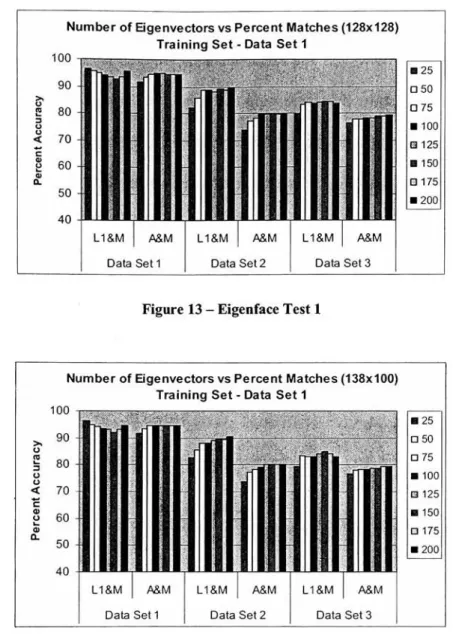
Figure 13
-EigenfaceTest 1 42
Figure 14- EigenfaceTest 2 42
Figure 15 - Images
per Subject Test 44
Figure 16- Number
ofSubjects Test 45
Figure 17 - EvaluationoftheFirst Three Eigenfaces 46
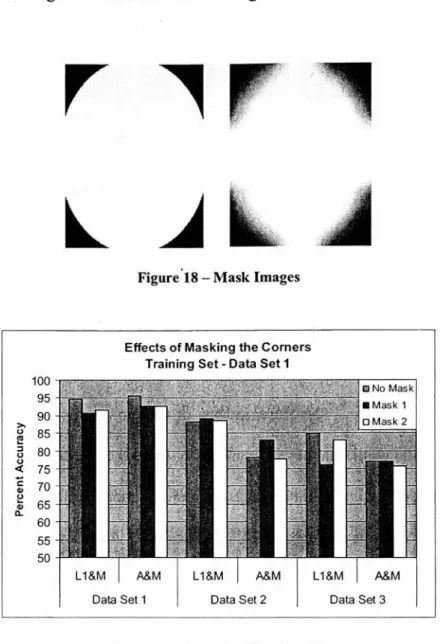
Figure 18-Mask Images 47
Figure 19
-Masking
Test Results 47Figure20- Male
Figure23-RetestoftheDistance Metrics 52
Figure 24
-ThresholdSelection forFace
Matching
57Figure 25
-ThresholdData forFace
Matching
58Figure 26
-GUIScreenshot ; 62
Figure 27
-Two views oftheFrameControls 63
Figure 28
-Frame
Display
Area 65Figure29- Face
Component 66
Figure 30
-Eigenspace Component 67
Figure 31
-Match Target Information -68
Figure 32
-Training
theTools 69Figure 33 -CameraView Correspondence Problem 71
Figure 34-2DViewofSimple CVC 72
Figure35
-Face Offset 73
Figure 36 - General Face Proportions 77
Figure 37- Tan-Sigmoid
andLog-Sigmoid Transfer Functions 80
Figure38- FlowchartoftheData Transmissionbetween Components 85
Figure39 - EigenspaceAverage Image Comparison 88
Figure 40- Eigenface Comparison
89
Figure41 - Eigenspace Comparison 90
Figure 42-Examples ofUnmatchedImages 98
Figure 43- False Positive Images
99
Figure 44
-Correctly
Matched ImagesandtheirMatch Scores 100Figure 46-Matches foraThresholdof0% 104
Figure 47-Matches foraThresholdof15% 105
Figure 48
-Matches foraThresholdof25% 106
Figure 49
-MatchesforaThresholdof40% 107
Figure 50
-Imagesof
Andy
inEnvironment A(left)
andEnvironment B(right)
108Figure 51 - Image
Comparison,
EnvironmentA(left),
Video System(right)
109Figure 52
-Equalized,
Grayscaleversion ofFigure 51 1 10Figure 53
-Square Image Size
Testing
-NoNormalization
-Data Set 2 118
Figure 54
-Rectangular Image Size
Testing
- No Normalization- Data Set 2118
Figure 55
-Square Image Size
Testing
- ContrastStretching
- Data Set 21 19
Figure 56
-Rectangular Image Size
Testing
ContrastStretching
DataSet 2 119Figure57-Square Image Eigenvector
Testing
-DataSet 2 119
Figure 58-RectangularImage Eigenvector
Testing
- Data Set 2 120Figure59
-Testing
fornumber ofImagesfor EigenfaceTraining
- Data Set 2 120Figure60- Evaluation
ofthefirst Eigenfaces
List
ofTables
Table 1
-Data
Processing
Pipeline ...83;'.;(X
Table 2
-ResultsfromtheInitial Test 94
Table 3- Results
fromtheSecond Test 97
Table 4- Resultsfor
using 10 frames forrecognition 102
Table 5
Glossary
FaceRecognition
FaceDetection
FaceAlignment
Feature Extraction
FaceClassification
Face
Matching
Eigenface
Yaw
Pitch
Roll
PCA
SVM
SVC
OVC
CVC
ROI
Process of
identifying
aface inanimage.Determining
thelocationand scale ofa face inanimage.Determining
where facialcomponents arelocatedandperforminggeometricnormalization.
Finding
features todistinguish between face images.Matching
asubjectinanimageto animage inadatabase.Real-time determinationofthedegreeof confidencetowhicha
livesubjectmatchesafacial image.
An Eigenvector froma setofface images.
RotationaroundtheYaxis.
RotationaroundtheXaxis.
RotationaroundtheZaxis.
PrincipalComponent Analysis
Support Vector Machine
Scene ViewCamera
Object View Camera
Camera ViewCorrespondence
Chapter
1
Introduction
Face recognition has been a topic of great interest to people in many different
fields.
Numerous
researchers from the disciplines ofPsychology,
Engineering,
ImageProcessing,
and Computer Science are interested indeveloping
intelligent
technologywhich mimics the workings of the human mind. Face recognition has attracted
significant interest because manyofthe approaches usedto
develop
algorithmsarebasedonknowledge ofthe humanbrain. The humanbrain is wondrous
ly
complex and allowspeople to perceive and interpret visual information about an object in moments.
Identifying
aface is so simple and commonplace fora personand yetinherently
difficultto duplicate for a computer. This is
largely
because our understanding ofthe humanbrain is so limited. This lackofknowledge has ledto a plethora of proposed algorithms
forthedevelopmentof computer systemswhichseektorecognizefaces.
Face recognition may be viewed as a combination of four distinct processing
steps. These steps are face
detection,
face alignment, feature extraction, and faceclassification[1]. Face detection
determines
whether a face is present inthe image andfindsthe location andthe size ofthe face. In face alignment, facial
features,
such as theeyes and mouth, are located and used to normalize the geometry of the face. Feature
extraction refers to the process ofselecting a set of
distinguishing
characteristics for aspecific image.
Finally,
faceidentification
uses the features to determine a match in adatabaseofknown images.
The majority of current research in face recognition is focused more on the
theoretical application of the
knowledge
and less on the practical aspects.Existing
database which is the closest matchto a source image. The images are gathered using
digital cameras and
thus,
there are no time constraints for processing ofthe image. Inaddition, the
lighting
is controlled and a flash is usedto producewell illuminated faces.While thisresearchisuseful, it cannotbeeffectively implemented inthemajorityof
real-world situations. The use oflarge databasesmakes the system
inherently
slow, causingunacceptable delays if the subjects are
being
monitored through a video system. Ingeneral, there is no guaranteethat therecognition ofthesubject is correct, because ifthe
subject isnotinthe
database,
itcouldberecognizedincorrectly.This thesis focuses on the problem offace identification in areal-time, dynamic
environment. Instead ofusing a large database of
images,
the systemtypically
uses asingle target image.
However,
it can also use a small set of images. These imagesinclude subjects ofinterest forwhichthe camera systemis searching intheenvironment.
The camera system employs face matching to decide if any ofthe desired targets exist
and determines theconfidence of amatchbetweena subject inthe dynamic environment
and afacetargetinpictorialform.
The differences between the common face recognition system and a face
matchingsystem canbe easilyexplainedthroughan example.
If,
forinstance,
acommonface recognition system was implemented in an airport, it would require a massive
database of face images and would
identify
every person passingby
(assuming
anenormous amount ofprocessing power). Ifthe
identity
ofevery person in the vicinitywas
important,
this system wouldbe justified.However,
ifthesystem wasattempting tosystem would then be able to select the criminals from the multitude offaces. This
system would examine how closely eachpersonresembledthecriminals inthe
database,
searching formatches. Ifthecommon systemwereto usethis smaller
database,
it wouldidentify
everypersonasthecriminalthey
mostcloselyresembledinthedatabase.The face matching
technology
could also be used in a manner similar to afingerprint scan inorder to give someone privileges or access to a system. An ID card
could have an encrypted image of a person's face embedded in it which could be read
whenthecardisswiped at aterminal. Acamerasystem couldthenbeusedtoverifythat
theperson who swipedthecard isthe actualowner oftheID card. Ifthe two match, the
identificationofthesubject is verified andheor shecanbegranted access.
The resulting outcome is that while current face recognition techniques and face
matching are similar concepts, the
development,
implementation,
and outcome ofthesesystems is significantlydifferent.
1.1.
Motivation
Facerecognition is arapidly advancingresearch topic in image processingdueto
the largenumber of applicationsthat canbenefit fromit. The
leading
applicationforfacerecognition is video surveillance. Other applications include determination of
identificationcredentials, human-computer
interfaces,
andcommunicationssecurity. Theintent of such a system is simply to extract information from a live video stream and
conveyittoa useful source.
Ifa system is developed that can match the face ofa subject, the subject can be
which can receivethe
identification
fromthe camerasystem. This openspossibilities foralot of opportunities asidefromstandardvideo surveillance.
1.2.
Problem Statement
Thegoal ofthis thesis isto
develop
areal-time, face matching system which canbeemployedinadynamicenvironment. The critical requirementsforthissysteminclude
theabilitytoobtainhighquality face imagesandtomatchfaces inafractionof asecond.
In order to get the precision required to manipulate and
identify
a face with a videocamera system, two cameraswillbe used. The reasonforthis is thatone ofthe cameras
will be
functioning
athigh levels of optical zoom in orderto get the most accurate faceimage possible.
However,
while zoomedin,
it will only be able to track a very smallportion oftheenvironment. While it ispossibleto start zoomed out,finda
face,
zoominon
it,
and capture animage,
each ofthese camera motions requires motor movement andis
inherently
slow. Thisprocess takestimeand unlessthe subject isstationary, it islikely
to fail. Amore effective method wouldbeto haveone camerasearchingtheenvironment
at low zoom. This camerais called the Scene View Camera (SVC). This camera finds
faces and givesthe locationofthesefaces to thecamerawhich is at ahigherzoomlevel.
This second camera is the Object View Camera (OVC). The two cameras are able to
workintandem,
finding
the locationofthe face andcapturingahighresolutionimage oftheface.
Inaddition to the obvious hardware requirements, the system needs sophisticated
images,
put themina standardizedform,
andfinally
attemptto matchthe face image tothedesiredsubject.
In order to improve the face matching process, the system employs ah
implementation ofprincipal components analysis that has been specifically tailored to
face matching. It is common practice to
develop
a principal components algorithm todetermine ifa region ofthe image
is,
infact,
a face. In order to recognize faces at avariety of pose angles, yet match faces accurately, a support vector machine will be
integrated for face detection. The use ofprincipal components will be solely for the
purposes offace identification.
Each frame captured
by
the SVC undergoes color segmentation to determinepossible face regions. These regions are examined
by
the support vector machine todetermine ifthe region is a face or not. The best face region is used as a guide to
determine the location ofthe subject in the environment. This information is used to
determine the pan, tilt, and zoom of the OVC. Each image captured
by
the OVCundergoes color segmentation aswell to aid in
locating
the face inthe new image. Thishighqualityface imagewillbe examinedfor its facial features. Oncetheeyes and mouth
have been
found,
the image willgo throughbothgeometric normalizationand histogramequalization. The image resulting fromthisprocess is thenexaminedusingtheprincipal
components algorithmto determine if itisa matchforone ofthe target faces.
Lastly,
inorderto allowthe systemto runinrealtime,
allofthesoftware must bestreamlined and efficient so that all ofthis processing can be done on multiple
images
each second. This ensures the system runs smoothly, matching faces ofthose who pass
1.3.
Outline
The
implementation
of a multiple-camera, real-time, face recognition system ispresented inthis thesis. This systemimplements a PCA based feature detection system
that has beentailored forface matching. The
following
chapterdiscusses priorresearchfocusing
onthe myriad of strategies for face recognition. The development and analysisofthe PCA algorithm are detailed in Chapter 3 and Chapter4. The threshold selection
and final
tweaking
of the face matching algorithm are detailed in Chapter 5. Thestructure and implementation ofthe real-time system are described in Chapter 6. The
performance and results obtained from the system are examined in Chapter
7,
followedChapter
2
Background
A Ph.D. student
by
the name ofTakeoKanade,
who is currently Professor atCarnegie Mellon
University,
is considered to have designed and implemented the firstface recognition system in 1973 [2]. Kanade used two computers to examine
approximately 800faces. Hisgoal was to examineand extractthe eyes, nose, andmouth
of the subjects. His research into examining faces excited interest in facial image
processing,
leading
to thedevelopmentoffacialrecognition as it is knowntoday.Serious activity in facerecognitionbegan inthe late80's andearly 90's. One of
themajor reasons forthiswasthatprocessingpowerwas
finally
reachingthepoint wherelargeamounts ofimage processing couldbe donewithout significantwaitingtime.
Early
image processingwas alldoneon stillimages storedonahard drive. It was not possible
to integrate the algorithms into real time because the system simply couldn't do it fast
enough. As the amount ofprocessing power
increases,
so does the ability to run moreand more complex algorithms.
As computing power continues to increase many of these algorithms can be
placedinto a realtimevideo system which allowstheprocessto movefromstatic images
to a dynamic environment.
However,
with this change a significant number of newfactorscomeintoplay. Theenvironment isno longerascontrolled, andthe
lighting,
pose2.1.
Current Research in Video Face
Recognition
Although significant amounts of research have been done on still image face
recognition, research in video face recognition has been sparse according to a literature
survey done
by
Zhaoet al. [3]. Some ofthenotable approaches includetheworkdoneby
Liu et al.
[4]
using adaptive hidden markov models to model human faces in videosequences and Shaohua Kevin Zhou and Rama Chellappa's
[5]
work using meandependent image groupsto
identify
subjects. Thereare fourprimaryreasons researchinthis area has been limited. Typical video environments have poor video quality,
variations in
illumination,
significant changes in subjectpose, andlow imageresolution.Thiscombination offactorsmakes it difficultto obtain agalleryofimage subjects which
canbeused for facerecognitionandsystemtraining.
In order to address the difficulties with video and image quality, a multiple
camera system has been used to enable the maximum effective level of zoom to be
selectedfor
tracking
asubject. Multiplecamera systemshave beenshownto beeffectivefor aiding in
locating
small features on a subject[6],
yet have not been proven to beeffective for face recognition. The combination ofthe two cameras at different zoom
levelswill allow subjectsto be effectivelymonitoredandtrackedathighimagequality.
Insteadofobtainingan extensive galleryof subjectsthrough therealtimesystem,
adatabaseofstillimageswillbeusedtocreate agalleryof subjects which willbeusedto
train the system. The FERET database contains a large number offacial images which
were captured in a controlled environment [7]. The variations present in subjects
2.2.
Key
Attributes
for
theFace Detection
Algorithm
In
developing
a realtime face matching system, it is important tomake sure thatthedesire for accuracydoes not overcomethedesireforspeed. Thecombinationofthese
two metrics determines the overall performance.
Therefore,
even though analgorithmmaybe very accurate, the processingtime required per image must be weighed. Ifthe
processing time is simply too
long,
the performance ofthe system is unacceptable inpractice.
Face matching with multiple cameras requires that the subject is
looking
at onecamera, but canbe detectedwiththeother camera.
Therefore,
the face detectionmethodmust be able to recognize profile views of a subject's face in addition to a direct frontal
view. Inaddition, the distanceofthe subject from thecameras is variable,requiringthe
method usedtobeableto compensate forfacesofvaryingsizes.
Lastly,
sincethe subjectis able to move
freely
whilethey
systemisfunctioning,
the system mustbeable todetectsubjects who are
looking
up or down. All ofthese variations require a face detectionmethod that is versatile, yet very efficient. The detectionofthe face in the frame is but
the first step in a very complicated process, and thus it cannot require too much
processingtime.
Face candidates will be located in the image using color segmentation. Color
segmentation will allow the system to locate regions which contain a large amount of
skintoneswhich shouldbeexaminedto determine ifthe region is aface or not. For this
reason, the face detection method will not be usedacross the entire
image,
but will beHSV (Hue Saturation
Value)
color space and that image processing in this space issimple and effective [8,9]. Adepiction ofthe special
locality
of skin tones in the HSVspaceisshowninFigure 1.
Figure 1- Skin Tone Concentration in HSV Color space
2.3.
Face Detection
Strategies
Template matching isone ofthe simplest methods for
determining
whether a faceobject is present. Template matching is a method which attemptsto search fora surface
that is similarly contoured to a face [10]. This is done
by
creating a surface whoseintensity
values match those predicted fora face. The eyes containthe darkest portionsalongwiththemouth andnostrils, whilethe foreheadand nose arethe brightestportions.
This templateis scaled andplacedover portions ofthe image inorderto determine
likely
canbeused to detect areas inwhichthe prominent edges matchup withexpected facial
features. Although reasonable success at face detection can be obtained using this
method, template matching is limited because it cannot account well for image rotations
which deform the face and may result in a poor match. An example of template
matching isshowninFigure 2below.
Figure 2- Average Face Template&Edge Template
[10]
A more complex method which is similar to template matching is 3-D face
modeling [11]. This method uses a set of generic three-dimensional face objects and
attempts to matchdifferent views of aperson onto one ofthese
fully
three-dimensionalobjects. As an image is mapped onto the generic face object, it will be deformed to
match the subject. The
deforming
process is done using a distance map which mapsfeatures onthe image to the featuresexpected on the 3-D model. Once created, the 3-D
subject model will allow accurate representations ofthe subject's face independent of
facialrotation.
Unfortunately,
due to its complexity it cannotbedone inrealtime and itisnotguaranteedthatenoughimages of a subject willbeavailabletocreatea complete
3-Dface model.
Anotherapproachto face detection is theuse of support vectormachines [12]. A
marginbetweensets ofdata. The supportvectormachinetakestwo sets ofinputdataand
attempts to classify the two types without
being
subject to overtraining. A graphicalrepresentation of how the SVM classifies
linearly
separable data is shown below inFigure 3. Inthefigure
below,
thedark dotsarebeing
separatedfromthelightones.Origin
Figure 3
-SVM
Classifying
ModelIn most cases, support vector machines are used to
identify
a particular objectclass
by
separating it fromotherpossible objects. Inthe case of a facedetecting
SVM,
itis attempting to find the optimal method of
differentiating
betweena face object andtherest ofthe world. Support vector machines are generally quite effective, and can be
trainedusingimages selected
by
the user. The selection of atraining
set would allowtheSVM to recognize faces at various poses. In addition, the input ofthe SVM must be
regulatedtoa specific numberofpixels.
Therefore,
any face region selectedby
thecolorsegmentation algorithm would be resized, allowing the SVM to be
independent
to theThe last face detectionapproach istheartificial neural network[13]. Anartificial
neural network
(ANN)
is alearning
systemthat ismotivatedby
the internal connectionsofthe human brain. An ANN is made up ofinterconnectedneurons called nodes which
respond inparallelto a set ofinput signals. Aneural network consists ofan input layer
of nodes and an output layerof nodes whichtheuser interactswith. Anumber ofhidden
layers of nodes may be present in betweenthese two layers to improvethe accuracy of
the system. Signals fromthe input layerare passedthrough thenodes and are subjectto
an activation rule. If the correspondence at the node is not high enough, it will not
produce a positive output signal.
Unfortunately,
as the complexity of the networkincreases,
the processing time required to compute the results of the network risessharply. Artificialneural networks often require an extensive
training
setandmaynotbeableto effectivelycapturethevariabilityoffacespresentintherealtime system.
Examinationofthe face detection methods outlined above shows that the support
vector machine allows for the largest amount of variability while still maintaining
efficient performance.
Therefore,
the support vector machine will be used for facedetectionintherealtimesystem.
2.4.
Key
Attributes of
theFace Classification Algorithm
When snapping a photograph or a series of photographs of a person, a large
numberof variations can come into play. The
lighting,
levelofzoom, camerafocus,
andquality ofthe captured image can varydue to the characteristics ofthe camera selected.
Ifthesubject
being
photographed is notcompletelystill, then therecanbe changes intheroll, onlyroll canbe compensatedforinaphotograph(orvideo frame). Figure
4,
showsthe relationship ofthese rotations. Due to the abundance of possible variations, the
algorithm selected mustbe
largely
independentofthese sources of error.Yaw
Roll
6
*0Pifcb
Figure4- Face Rotations
With this in mind, the existing face classification algorithms must be evaluated
based on three important criteria. These criteria are the accuracy ofthe algorithm, the
algorithm'srobustness intheface oferror,andtheprocessingtimerequired.
2. 5.
Face Identification
Strategies
A promising method for matching faces appears to be principal component
analysis
[14,15,16,17,
and 18]. This method, pioneeredby
M. TurkandA Petland[16],
uses objects which are called Eigenfaces. Eigenfaces are simply the Eigenvectors
derived from aset offace images. The Eigenvectors represent anew set ofcoordinates,
called an
Eigenspace,
which allow efficient encoding of the most important facialontothe Eigenfaces. The sets of weights fortwo separate images canthenbe compared
in order to assess the degree ofcorrelation between the images. Images ofthe same
person shouldhave very high correlation. Theuse ofEigenfaces has recentlystartedto
emerge astheresearch standard for facedetection because it is quite reliable and nottoo
computationallyintensive.
Researchers have been workingon ways to improvethe standard PCAalgorithm
and have succeeded in multiple ways for specific systems. One ofthe most promising
methods is based on Linear Discriminant Analysis (LDA). LDA reduces the
dimensionality
of a face image in a similar method toPCA,
yet instead ofproducingorthogonal vectors, it produces vectors which
linearly
separate the data as much aspossible [19].
Therefore,
ittheoretically
produces a set of vectors which are moreeffective at face classification than Eigenfaces. The LDA vectors are similar to
Eigenfaces and are often called
Fisherfaces,
sincethey
weredevelopedby
Ronald Fisher.Unfortunately,
inorder to trainsuch a system to be more effective thanPCA,
all ofthevariables which will be encountered
by
test subjects must be in thetraining
set. Suchvariables include
lighting,
pose angle, andexpression. Sincethe system willbe run inadynamicenvironment, ensuring incorporationof all ofthevariables maybe impossible.
Another method,
Evolutionary
Pursuit,
attempts todirectly
improve PCAby
manipulating the Eigenfaces themselves [20].
Evolutionary
Pursuit(EP)
requires aninitial set of Eigenfaces generated
by
a standard PCA algorithm. The resultingEigenfaces arethenputthrougha largeseries oftestsinwhichthe vectors arerotatedand
theperformance ismeasured. Theperformance ofthe resultingvectors is measuredwith
vectors discriminate wellbetween
faces,
yet are still effective at matching a wide rangeof faces. While this method can generate vectors which are more effective than
Eigenfaces,
it is limitedby
the efficiency of the Eigenspace and the additionalcomputationisnotjustified
by
theperformance increase.Independent Component Analysis
(ICA)
wasinitially
developed to separateindividualsignals froma combinationandcanbe employed for facerecognition [21]. It
decomposes a complicated signal into additive subcomponents which are statistically
independent and was firstused for facerecognition
by
Bartlett and Sejnowski[22]. ICAdiffersfrom PCA inthat ituseshigherordermoments inorderto separatethedata. PCA
uses 2n
order momentsand decorrellatesthedata. Whenused for face recognition, ICA
assumes that a face is a combination of a set of unknown source images. These
independent images can be used to
identify
a particular subject. While ICA has beenshownto bemore effective at
distinguishing
differences between images of aset, it doesnotgeneralize welltoimageswhich are notintheset.
Every
human face has a unique, yet similar topological structure. A methodwhich examines this structure in order to determine the
identity
ofthe face is ElasticBunch Graph
Matching
(EBGM)
[23]. In this system, faces are represented as graphswhich have nodes at important features such as the eyes, nose, and mouth. The edges
betweenthe nodes are weighted with the distance betweenthe nodes. In addition, each
node contains information about its feature in the form ofGabor wavelets. While this
method differs greatly from the other methods examined above, it does not achieve the
A final method, Bayesian statistics has been used in conjunction with both
Eigenfaces and Fisherfaces to improve the performance ofthe feature vectors in face
classification. Thisapproach uses a statisticalclassifierto
help
determine the importanceofthe components ofthe feature vector, allowing for more accurate face classification
[24,25].
However,
the use ofBayesian statistics isheavily
dependent on the underlyingfeature set selection and can only marginally improve performance. Thus Bayesian
statistics willnotbeemployedinthis thesis.
2.
6.
In
Depth Look
atPrincipal Component
Analysis
The methodology behind principal component analysis
(PCA)
is related to theentropy of a system; where entropy is a measure ofthe amount ofenergy in a system.
PCA works
by
first gatheringa large setoftarget images. The covariance ofthis imagesetis thenfound. Thecovarianceis a measure oftherelative variation ofthe imageswith
respect to each other. With this
information,
the Eigenvectors and Eigenvalues ofthesystemcanbeproduced. The Eigenvectors forma coordinate system where an
image,
ofpredeterminedsize,canbe located. Ifthe setofEigenvectors is complete, the imagecan
be completelyrecreated from its location inthis coordinate. The advantage ofusing the
Eigenvectorsto describe the image is that the Eigenvectors are produced in such away
that the axes
try
to minimize the entropyofthe system.Minimizing
the entropyofthesystem allows the maximum amount ofdata to be encoded inthe minimum amount of
space. This means that if only a small number of the most important
Eigenvectors,
determined
by
largerEigenvalues,
are used, the majority of theimage
will behundred or so values which correspond to its coefficients in the Eigenspace. While a
reconstructed image is not perfect, it contains the principal components ofthe face
by
which the person can be
identified.
On a side note, ifthe Eigenvectors are viewed asimages lookas if
they
areghostlyfaces,
and are oftenreferredto as Eigenfaces.In order to
determine
theEigenfaces,
many steps must be taken. The generalformofthisprocess wasdone
by
Matthew TurkandAlex Petland[16]. The initialset oftraining
images is defined asIi, F2,
X_.
...tu,
where there are M images ready forprocessing. Theaverage oftheseimages is *P andcanbe found
by
theequation1 M
M^
Each face image will then be processed
by
subtracting the average image to create thenew set offace images marked
by
<DN,
whereO^
=FN
-*P and N =1,
2,
3 ... M. .Thecovariancematrix,
C,
ofthisset ofimages canbe determinedby
T
Thecovariance isgenerally inthe formofC=AA
and canbeput into this form if A is
defined as the set of mean adjusted images A =
[Oi, 02,
<t>3 ... Om]- With thecovariance ofthesystem
defined,
it ispossible to findtheEigenvectors ofthecovariancematrix. The Eigenvectors ofthis matrix with the largest Eigenvalues correspond to the
dimensions ofthesystem withthestrongest correlationinthe dataset.
Unfortunately,
thecovariance matrixis ofthe size PxPwhere P isthenumber ofpixels in the source images. For images ofdecent quality, 128 x 128 pixels, this matrix
needed. It is possible to find the Eigenvectors and
Eigenvalues,
Vi andXi,
ofthe matrixATA suchthat
ATAv;
= Xyi. Ifbothsides ofthis equationare pre-multiplied
by
A,
theequation becomes
AATAv;
=XjAvj. In this equation, it is obvious that
Avi
are theEigenvectors ofthe matrix
AAT,
which is the covariance matrix. The benefit ofthismethod is that the size ofthematrixATA is notbased uponthenumber ofpixels, but on
the number ofimages.
Therefore,
with this method, the principal M Eigenvectors of asystem canbe
determined,
whereMisthenumberofimagesused.In order to make use of this
information,
a "scrambled covariancematrix"
is
calculatedusingtheequation
cXzx*.
thusallowing Cs=ATA. The Eigenvectorsofthis"scrambledcovariance
matrix" canbe
determined using singular value decomposition. These Eigenvectors must now be
multiplied
by
the matrix A in order to get the principal Eigenvectors of the realcovariance matrix. SincethematrixAis a
listing
oftheimages,
thiscanbe donethrougha processofsummingthemultiplicationofthe Eigenvectorsandtheimages fromthedata
set. Theprocessto
develop
therealEigenvectorsofthe system, ul, thereforeisM
K=l
whereL =
1, 2,
3 ... M. Withthisprocess complete, the Eigenfacesare simplytheset ofEigenvectors
pl-The Eigenfaces forma set of vectors which constitutes a newcoordinate system
throughwhichdistancescanbe measured. In orderto getthecoordinates of an
image
inthe image into the Eigenspace. This process israther simple andinvolves the use ofthe
innerproduct. It consists ofsubtractingtheaverage image fromthe imageto project and
thenmultiplying
by
theEigenfacestoobtainthe set of weights. Theweight vectorhasanentry
corresponding
toeachEigenfaceandis beafloating
point number. The creation oftheseweightsis done
by
coK
=pTK(T-P)
whereK=1, 2,
3 ... M.The weight vectoris the set of coordinates
by
whichthe image canbe located inthe Eigenspace.
Therefore,
once the weights of two images can bedetermined,
the"distance"
between the two images can be calculated relative to the Eigenspace. There
are many different distance metrics that can be used. The distance metrics that were
examinedareshownintheequationsbelow [14].
Dist(x,y)
=|
Equation 1
-LtDistance
Dist(x,y)
=J_li(xi-yi)2Equation 2 L2Distance
ZX-XK,-Dist(x,
y) =,X
A=X
J
Equation3- Anglebetween Vectors
Dist(x,y)
=-_?.=ixiyizi
Equation4- MahalanobisDistance
Dist(x,y)
=Equation5
Dist(x,
y)=__]kJ=l
(x,
-yi)2zi
Equation6
-L2&MahalanobisDistance
1*
Dist(x,y)
=-E^xT
Equation7- AngleandMahalanobis
where z=
,
Xi
=Eigenvalueofthe ithEigenvector
A;
Thedistance measures above correspondto two vectors ofweightscorresponding
to two separate images. The first image is assumedto be Xwhere x; is the ith weight in
thevector. The secondimage is assumedtobe Ywherey; isthe ithweight inthe second
image's weight vector. Equation 1 shows that the Ll distance is simply the sum ofthe
absolute value ofdifferences betweentheweights. The L2 distance is similarto the Ll
distance,
yet it computes the totalsquare errorbetweenthe weights. While this normisgenerally considered more useful than the Ll metric, bothwill be included in the tests.
The Mahalanobis distance metric takes into account theproperties ofthe Eigenspace. It
applies aweighting
factor,
z, to thesystem. This factorrelates the Eigenvectorwiththestrength
by
which it is correlated to the dataset.Therefore,
Eigenvectors with highercorrelationto the datasetshouldbeweighted more
heavily
sincethey
are moreimportant.Thus,
the Eigenvalues allow the distance metric to weight the distance based upon howimportantthe
difference
betweenthe two measures actually is.Theselection of principal component analysis as the algorithm for face matching
thismethod. Thealgorithm must, therefore, be adaptedto obtainthe maximum levelof
Chapter
3
PCA
Implementation
Developing
an implementation of the PCA algorithm was no simple task. Inorderto obtain an accurate set ofEigenfaces and successfullytest the system, over 600
images were
individually
preparedby
hand. The algorithm was then implemented andtestedwhilevarying manyparametersinordertoobtainefficient, yetaccurate results.
3.1.
Source Images
In orderto obtain the sheer volume ofimages needed to
develop,
train,
and testthe system,adatabaseoffaceswas necessary. Onesuchdatabase istheFERET database
[26]. The FERET database was sponsored
by
the Face RecognitionTechnology
(FERET)
program which was supportedby
the Department of Defense'sCounterdrug
Technology
Program. The goal ofthe FERET program was todevelop
automatic facerecognitiontechnologiesthat couldbeusedto assistthelawenforcement community.
Inorderto accomplish this task, alarge database offace images was gathered
by
professors atGeorge Mason
University,
independently
ofthealgorithmdevelopers. Theimageswere collected inapartially controlled environmentinorderto maintain adegree
ofconsistency. The samesetupwasusedineachphotographysetup, yettheimages were
collectedonmany differentdayswith slightlydifferentequipment.
The database was
fully
assembled after fifteen sessions whichtookplacebetweenthe fall of1993 andthe spring of1996. The FERET database totals more than fourteen
thousand images in about fifteen hundred sets. Over one thousand subjects were
Inorderto
develop
a cohesive set ofEigenfaces,
the images inthedatabase wereexamined and selected. Since theobjective ofthe
testing
would be to matchanimageofa subject to another image of the same subject, two images of each individual were
needed. The
images
hadtobe similar, yetnot identical. Imageswith variations in facialpose angles, expression,and
lighting
were acceptable candidates. Imageswithvariations.in facial
hair,
glasses, or severe differences were discarded. The images were thengroupedintothreedistinct datasets.
Thedatasets were determined
by
theperceivedlevel ofdifferencesinthe images.Thefirst dataset contained pairs ofimages which were deemedthemost similarto each
other. Theimages inthisset werealso takenatthesame levelofzoom,
lighting,
andhadsmall variations in facialposes angles. Thesecond set consisted ofimages withslightly
larger variations. The images in the third set were considered the oneswith thegreatest
variation. Images inthisset varied
by
zoomlevel, lighting,
larger facialposeangles, andmore extreme expressions. It was this third set that was intended to measure the
generalizationofthealgorithmdeveloped. This set is also themost importantsince once
thealgorithmis integrated into therealtime camerasystem, allofthesevariations would
comeintoplay.
Data Sets 1 and2 each consisted of 100 subjects,
fifty
ofwhich were male andfifty
of which were female. Data Set 3 consisted of77 subjects, 5 1 ofwhichwere maleand 26 ofwhich were female. There were two images ofeach subject selected and no
subject appeared in more than one data set. The images were
finally
cropped in a3.2.
PCA Algorithm
In order to calculate the
Eigenfaces,
the programinput
requires alisting
ofimages,
the desired width and length of theEigenfaces,
and the desired number ofEigenfaces. In order to produce solid Eigenface
images,
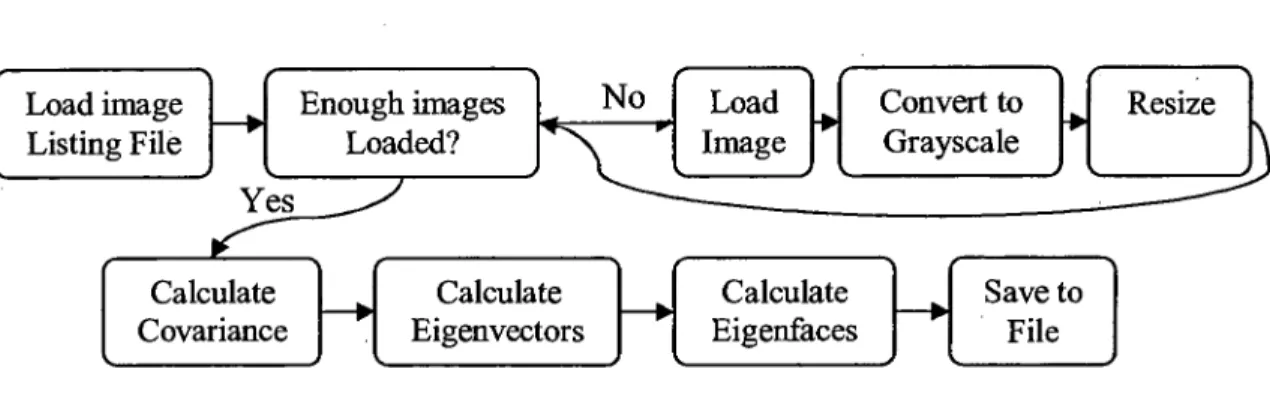
the source images must bestandardized inthe same way. A flowchart ofthe steps takenis shownbelowin Figure
5. ( Loadimage ? r Enoughimages led? No f -Load Image > -Convertto -? r Resize
Listing
File Loa( GrayscaleYes Calculate Covariance ? Calculate Eigenvectors ? Calculate Eigenfaces
-? Saveto File
Figure 5- Eigenface Creation Flowchart
Thecovariance ofthe imageset reliesupontheimportant features from differentsubjects
matching up in the same pixel locations. This means that each ofthe source images
shouldbe croppedinthe same manner, centered onthe eyes, and rotated so that the face
image contains no more than 15 degrees of roll. For initial
training
and developmentpurposes this was all done
by
hand. The faces were cropped at thetop
oftheforehead,
bottomofthe chin, and at the base ofthe ears for over500 faces. Ifthe face had more
than 15 degrees ofroll, it was
digitally
rotated so that the roll was as close to zero aspossible.
After all ofthe images were cropped, listings ofthe images were created so that
created with the full name of the images desired with a single filename per line in
alphabeticalorder. This simplified theprocess ofreading inthe
images,
countingthem,
andmost
importantly,
keeping
trackofwhichfaceswere matches.The images are then read into the system one at a time with each image
being
processedbefore
being
addedto alarge input imagearray. The processing ofthe imagesis relatively simple. Each image was resized to a standard width and length in pixels.
Once thiswas completed, the imagewas normalizedto
help
reduce theeffect oflighting
uponthe image. At the completion ofthis step, the system contained an arrayofup to
500 imageswhichhadbeenproperlyprocessed.
In order to determine the Eigenvectors of the
images,
a standard covariancematrixcould not beused since the covariance matrix of a set ofimages sized at 128
by
128 pixels would contain over 250 million entries (228). This data would be nearly
impossibleto contendwith. Itis forthisreasonthatthe"scrambled" covariancematrixis
calculated as mentioned in section 2.6. The scrambled covariance matrix contains the
same number of entries as the number of pixels in the input images. From this
covariance matrix aset ofEigenvectors isdetermined along withthe set ofcorresponding
Eigenvalues. The Eigenvectors are used to create the Eigenfaces through a process of
scaling and adding the initial images to one another as described in Section 2.3. The
resulting Eigenfacevectors are storedto atextfile for laterretrieval and use.
In orderto effectivelyuse the PCAalgorithm, Eigenfaces should be created and
used at the same resolution.
Resizing
the Eigenface objects creates distortions whichaddition, any imagewhichis going to beused in the Eigenspace should be processed in
exactlythesame manner asthe
images
which were usedinthecreation oftheEigenfaces.3.2.1
Difficulties
Thereare many challenges inherent in
developing
asuccessful set ofEigenfaces.The first and foremost among them is the need for clear, pronounced, relevant
Eigenfaces. The only waytoachieve such results istouse alargenumberoffaceswhich
have beencropped and rotated in thesame manner so thateveryprincipal component of
thedifferent face images line up with eachother.
Unfortunately,
it is nearly impossibleto crop each image
by
hand in exactly the same manner. To make matters worse, thepitch and yaw of the face in the images can not be controlled. While these slight
deviations do not matter to the human eye,
they
have unknown and possibly profoundeffects uponthecreationoftheEigenfaces.
Each error in cropping or poor image selection potentially introduces error into
the development ofthe Eigenfaces. Ifenough error is
introduced,
an entire Eigenfacecouldbe devotedto
it,
reducingtheeffectiveness ofthe otherEigenfaces.Unfortunately,
a visual examinationofthe Eigenfaces cannot reveal ifone is valid or not.
Furthermore,
whenthematchingprocedure failsto match a set offaces it isoftenextremely difficultto
3.2.2
Limitations
There aremany
limitations
placed upontheeffectiveness ofthe Eigenfaces basedupon their desired use. For this system, the Eigenfaces are
being
designed for theidentification of the principal components of a subject's face and not for
directly
identifying
faces. Thismeans that the Eigenfacesare always assuminga frontalandnon-rotated view of the face and cannot work effectively with a side view of the face.
Eigenfacesaregenerallytrainedwithtiltedfacesaswellas frontalviewstoallowthemto
recognizefacesthat are
tilted,
as faceobjects. Inthisworkitisassumedthat thefacewillalready be identified before it is passed to the Eigenspace for calculations. It is also
desiredthat the pose angle ofthe face should notplay an important factor in
identifying
whetherornotthe facematches a particular subject. This lineofreasoning clearly leads
to the factthat in
training
theEigenfaces,
itis desiredthatno principal componentsintheEigenspacecorrespondtotheangle ofthe face. Iftoo manyoftheEigenfacescorrespond
to the angle ofthe face instead ofthe facial
features,
the system will match subjectswhoseheads are posedinthesame manner.
Another limitationofthealgorithmisthat it is significantlymoredependentupon
lighting
variationthanpreviouslyreported. Whilethis is notsurprising inretrospect, it isstill a difficult issue to handle. Research showed that an effective Eigenspace was
relatively independent ofthe light source, as
long
as there was enough light to view theface. Forthe purposes ofmatching specific
faces,
the camera needsto produce animagewith crisp, clear features instead ofjust a general view that canbe identified as a face.
intensity
and angle ofthe light. This means that the environment needs to be morecontrolledthan
initially
believed ifperformanceis tobe maintained. It also may have aneffect onhowthealgorithmgeneralizes acrossdifferent environments.
Athird
important
limitofthe algorithmis that the ears, a ratherdistinct featureonmostpeople, cannotbeused to
identify
theface,
withoutserious restrictionsplaced uponthe camera system's environment. The reasonforthis is that the ears stick out from the
face and therefore create pockets above and below them, in a cropped
image,
whichcontain a view ofthe background. Since the background is ever-changing, this adds a
significant amount of noiseto theprocessed image and cloudstheEigenfaces. Thiscould
be avoided
by
putting the camera system into a room with where everything wasfeaturelessandwhite,butwould renderthesystemimpractical. Itwas found
during
earlytesting
that thiswasthe case,hence itisdesirabletocropthefaceatthebaseoftheears.Finally,
the goal offace matching is not to foildisguises,
but toidentify
a morecooperative subject. In this regard, disturbances such as removing glasses, modifying
facial
hair,
and other face occlusions were not trained into the Eigenfaces. It is desiredthat the system work on effectively matching clear facial images. To this end, facial
occlusions were not presentin anyofthe
training
imagesand were nottakenintoaccountinthe finalsystemdesign.
3.3.
Distance Measure
Implementation
&
Testing
Previous research showed that there exist many
different
ways to measure thedistance betweentwo images which had been projected into an Eigenspace [14]. While
instead ofselectingthe best resulting measure fromanotherexperiment. The reasonfor
this decisionwas that the Eigenfaces were trained specifically for this system,
focusing
on certain variables and
being
used ina unique way. The effectiveness ofthe distancemeasures would most
likely
vary, since so much ofthe system would not remain thesame. In orderto test each ofthe distance measures, a systematicprocess ofexamining
thefaces wasdeveloped.
The method developed alloweda large set ofimages to be examined. In the set
eachsubject wasrepresented
by
two images. The process functionedby
taking
the firstimage,
and calculating its distance to each ofthe other images in the set. The imagewhich was closest, yet not identical was considered the best match. The system
displayedthe initial
image,
and the twobest matches foreach ofthedistance metrics, toallow visual confirmationofthe accuracyofthestatistical measure
being
calculated. Thesystem would record whetheror not the imagesselected werecorrect matches. Afterthe
calculations were completethesystemwould pausemomentarilyandthenmove onto the
next image. This pattern would continue until the entire set of images had been
processed. The resultingstatistical informationwas loggedtoafile.
In orderto gather useful statistical
information,
onlyoneparameterwas varied ata time. The test results for each of the variables are displayed in Section 4.1. The
importantvariables inthe
testing
were:- Distance Metric Selection
- The Normalization Method
- Number
ofImagesperSubject
-The NumberofEigenfacesto
Keep
- The
EffectivenessoftheFirst Eigenface
- TheEffectiveness
of
Masking
theImage- The
Effectiveness of Malevs. Female Eigenfaces
The number ofEigenfaces to
keep
was an important variable because while thefirstfew Eigenfaces arerelativelyclear, the last Eigenfaces are significantlydistorted
by
noise. Asaresult, it is importantto determinethepoint at whichanEigenface becomes
useless because it no longer contains any valuable data. In addition to
this,
theeffectiveness ofthe first Eigenface is called into question. Thefirst few
Eigenfaces,
it isgenerally
believed,
are relatedto the most prominent angles oflighting
in the image set[14].
Therefore,
it may be wise to remove these images since it is desired that theEigenspaceisunaffected
by
thelighting
conditions.Asecond importantvariable iswhether or nottomaskthecorners ofthe imageto
remove noise. While this is a pretty standard practice, once again the focus of the
Eigenfaces
being
developed is different and may require a different approach. Theprimary concern ofthe
Eigenfaces,
for this system, is to be able to characterize theprincipalcomponents ofthe face. To thisend, the imagewas croppedvery closelyabout
the face and contains very little ofthe noisy background scene. This makes it possible
that masking the imagewould remove importantportions ofthe image instead ofaiding
in removing noise from the image. The use of a mask could also add unexpected
Lastly,
anintriguing
question arose. The human visual system can easilyrecognize the
difference between
male and female faces. Would itbe useful todevelop
Eigenfaces which could be specificallymale or female? This would be possible in this
system, since user input is required to select the face that is desired for matching. It
would be a simple matter to force the user to input a gender with the desired face.
Despite theseemingly
intuitive
nature ofthis question, very little information seemed tobe available onthewisdomofsuchanapproach.
3.4.
Distance Measure Results & Selection
After some initial
testing
to ensure that the Eigenfacetesting
algorithm wasworking correctly,
testing
began to determine the most effective distance measurement.With so many variables,
taking
measurements with more than two different distancemetrics wouldsimplycreatetoo muchdataandbeginto causeconfusion.
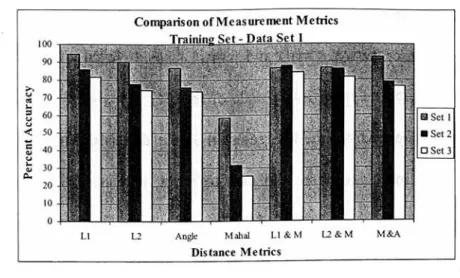
Inordertodrawa usefulconclusion, thealgorithmwasset up inamannersimilar
to what was found in other papers. The image size was set at 128 x 128 pixels, the
imageswere normalized withhistogramequalization, 200 images of unique subjects were
used to train the
Eigenfaces,
and 100 Eigenfaces were used in the distance calculations.100
90
-f-3 60J
u < 50
ComparisonofMeasurementMetrics
Training Set- QataSet 1
Angle Mahal Ll&M L2& M M&A Distance Metrics
Figure 6- Distance Metric
TestingResults
While the Ll distance metric scored the highest in the first data set, it was not
selectedbecause it did not appearto generalize wellacross thedifferent data sets. Since
theEigenspace is intended forareal-life, dynamic environment, themostweight was put
onthe accuracyofthe results in measuring Data Set 3. The Ll & Mahalanobis distance
metric scored the highest in Data Set 3 and had the highest average score. The tight
grouping of the scores and the average above 85% matching accuracy gave it the
definitive lead intheselectionofthedistance metric. The
Ll, L2, Mahalanobis,
Ll &M,
and L2 & M metrics are all
highly
correlated measurements. Since the Ll &Mahalanobis metric was the most successful ofthese
five,
the second metric to test wasselectedas theMahalanobis&Anglemeasurement. Thismeasurement scoredthesecond
highest forthefirstdataset and wasbetterthan the Anglemeasurement alone.
3.5.
Eigenfaces
Inorderto computetheEigenfaces foraparticular set ofdata
images,
theaverageinthedata setbefore processing begins. Theaverageface for Data Set 1 isshownbelow
in Figure 7.
Figure 7- Average Face
Almost all ofthe calculations in regards to
developing
the covariance matrix,Eigenvectors,
and the resulting Eigenfaces are done with 32 bitfloating
point precision.Inorder to maintain this level ofaccuracy, all Eigenfaces and information stored in the
database files for future use are also storedinthe 32 bit
floating
point format. Inordertoview the Eigenfaces
however,
it is necessaryto scale themto thestandard 8 bitgrayscaleversion suitable fora
bitmap
image.To this effect, whensaving or viewing anEigenface throughthe system, a linear
scaling is done whereby the lowest value is scaled to 0 and the highest to 255. This
scaling has been performed on the first five Eigenfaces and can be seen in Figure
8,
Figure 8- The First Five Eigenfaces
The first Eigenfaces arerelativelyclear as intended. The features seem to match
up quite welland adistinct set ofeyes, anose, and a mouth, are clearly visible ineachof
them. An important featureto noteis thegeneral lackofextremes andhow thecontours
on the Eigenfaces appear as one would expect. A good feature to note is the lack of
strange artifacts or noise in the corners ofthe images. The corners ofthe image contain
background image and are not important facial feature data. While it is generally very
difficult to determine what principal components each Eigenface characterizes, the
second and third Eigenface appearto be relatedto the horizontal and vertical
lighting
ofthe subject. This may be importantwhenmoving the algorithminto the real-timesystem
where
lighting
willby
no meansbeconstant.As the order of the Eigenfaces
increases,
and their respective Eigenvaluesdecrease,
theimagesbecome noisier. Thisprogressionisexpectedbecausethesize oftheEigenvalue determines the relevance ofthe corresponding Eigenface. Therefore as the
Eigenvalue
decreases,
the corresponding Eigenface should be capturing less significantFigure 9
-Eigenfaces50&51, 100 &101,and 150
The 50 and 51st
Eigenfaces are still relatively clear face
images,
but the clarityrapidlycontinuestodegrade untilthe 150thEigenface only hintsat facial features. While
the later Eigenfaces may appear to be worthless images containing
largely
noise, aChapter
4
Evaluation
ofPrincipal
Component
Analysis
Thedatapresented inthissection wasrecordedafterinitial
testing
confirmedthattheprincipal component analysis algorithm was working. Itwas also confirmed that the
testing
and statistical measurement aspect ofthe algorithm was working as well. Theinitial results will not be presented
however,
since the data does not reflect the finalimplementationofthealgorithm.
While it is often accepted practice to use square images to trainand producethe
Eigenfaces,
it seemed prudent to test the images in a more natural shape for a face aswell. To this end, the average length and width of the cropped face images were
measured and calculated. Itwas foundthat the croppedimageswereinthe ratio of1.38
to 1 forthe height with respect to the width.
Using
this ratio, several image sizes wereselected andsubsequentlytested.
In order to examine the effectiveness of the system, and how the algorithm
generalized across data sets, the system was trainedand testedwith both Data Set 1 and
DataSet 2. The results forthe two different
training
sets werethenexaminedtogethertohelp
determinethebestmethodfortiaining
thefinal Eigenfaces.4.1.
Data Gathered
In the
following
section, results were obtained to allow the PCA algorithmto beoptimized to produce Eigenfaces which would be effective in the real time
implementation. Datawas gathered foreach ofthe points ofinterest outlined in Section
4.1.1
Image Size
andNormalization
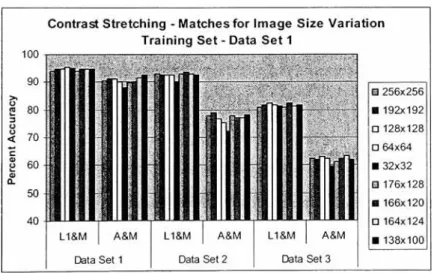
MethodInorderto examinetheeffects ofnormalizationonthe
images,
the firstthree testswere doneusing equalization, contraststretching, and nonormalization.
Equalization,
orhistogramequalization, is an imagetransformationwherebythe image is adjusted so that
each
intensity
level is representedby
an equal number of pixels in the image [27]. Inmost cases, this improves the contrast in the image.
Unfortunately,
it can also causeimperfections in the image to stand out. Contrast stretching attempts to adjust the code
values inthe image sothat alargerrange ofintensities is used. Thenew
intensity
ofthe(
255^
pixel canbe calculated
by IN
(x,
y)=(l(x,
y)
-Min)
for standard grayscale\Max-Min)
images. MaxandMinare themaximum and minimum
intensity
levels inthe image. Forexample, ifall ofthe pixels in an 8 bit image fall in the range of20 to
200,
applyingcontrast stretching
linearly
scales the pixel values to be in the range of0 to 255. Thisincreaseofseventy fivelevels ofimage
intensity
allows forabetterdefined image.The results for the normalizationtests are shownb