SUPERCONVERGENCE OF NUMERICAL SOLUTIONS
TO
SECOND KIND INTEGRAL EQUATIONS
by
G
.
A. Chandler
A thesis submitted to the Australian National University for the degree of Doctor of Philosophy
PREFACE
This thesis has benefited greatly from discussion with others. The existence of the singularities in the solutions of weakly singular equations was explained to me by Ivan Graham, and I thank him for the references [30] and [34] . The use of the adaptive method in chapter 5 for
pt-
00 was suggested by Mark Lukas. My attention was drawn to the duality argument of the finite element literature by Mike Osborne.Otherwise, the results of the thesis are my
(ii)
ACKNOWLEDGEMENTS
The majority of the research for this thesis was undertaken in the
disgraceful circumstances created by the Australian National University's dismemberment of the research activity of the former Computer Centre. It is a considerable tribute to the quality of the staff and students of the resulting Computing Research Group that a suitable academic environment was created under such duress. I wish also to thank the Department of Pure Mathematics and the heads of the department (Professor N.S. Trudinger and Dr N.F. Smythe) for providing such suitable resettlement.
I wish to express my very great debt to my supervisor, Bob Anderssen. His enthusiasm for such a broad range of computational applied mathematics has been invaluable. His concern with, and attention to, the needs of his
students has resulted in supervision of an extremely high order. I am deeply grateful for all that he has done for me.
I acknowledge also the very close contact I have had with two fellow students; Ivan Graham from the University of New South Wales and Mark Lukas from A.N.U. In particular Ivan has generously expounded his unpublished ideas on the subject matter of chapters 4 and 5.
Many people had volunteered to help with the proof-reading; but only a few could be chosen. I thank Max Cohen , who utilized what she intended to be a purely social weekend, and Carolyn Lukas and Jacki Hickman.
ABSTRACT
This thesis examines certain numerical methods for the solution of second kind Fredholm integral equations of the form
( 1) X E [0,1]
where K is the operator defined by
--
fo
1(Ku) (x) k(x,~)u(~)d~
Let u be the Galerkin solution to (1) using an n-dimensional space n
of piecewise polynomials of degree r as the basis space . It is known that //u -uo/1
~
O(n-r-1)n oo Chapter 2 shows that if u n is used to calculate the iterated Galerkin solution, u
*
=
f+
Ku then (under suitable regularityn n
conditions on k and f) the order of convergence is doubled to That is , u
*
is globall y superconvergent.n If k
fails to satisfy the regularity conditions because of a discontinuity along the diagonal X
=
~'
then u*
n still exhibits this
- 2r-2
O(n )
super-convergence at the grid points, but not globally. Chapter 3 shows for smooth k and f that global superconvergence is preserved when the integrations required to form the Galerkin equations are performed numerically. The proofs of chapters 2 and 3 use the duality argument from the finite element
literature .
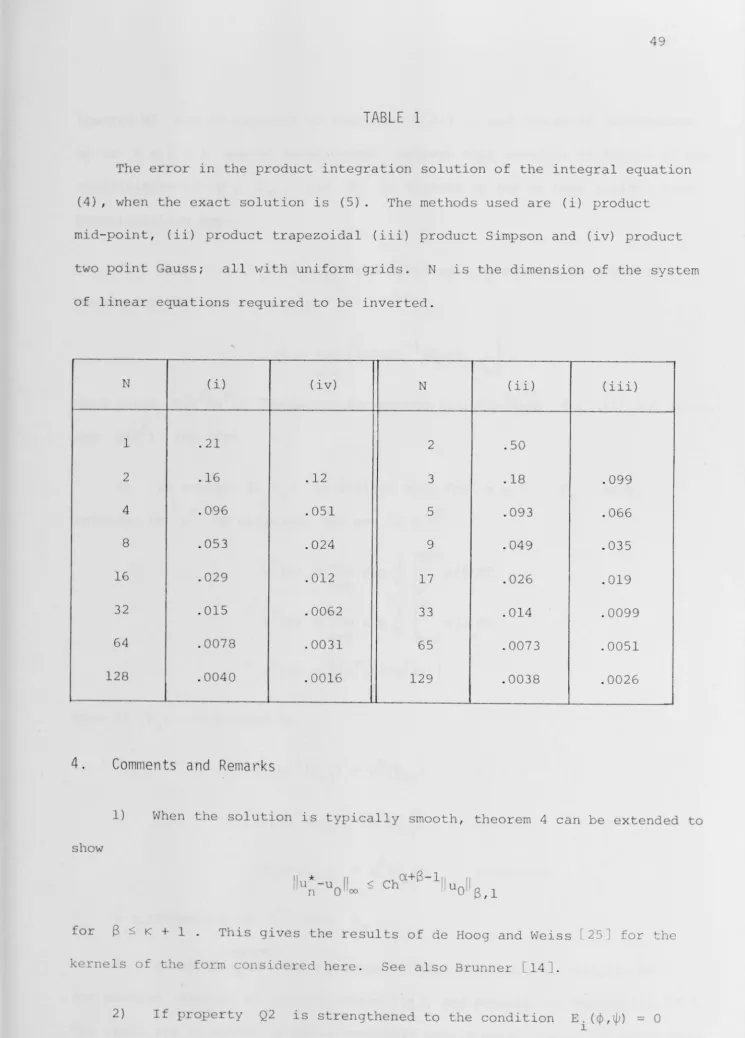
In practice the kernel function k is rarely smooth. Chapters 4 and 5 consider product integration solutions to (1) when the kernel is of
convolution type with a weak singularity. The high rates of convergence observed for the product integration solution when u
0 is smooth have been explained previously. However the singularity in the kernel introduces certain typical singularities into u
(iv)
Chapter 4 uses a modified duality argument and a characterization of the
singularity of the solution in terms of Nikol 'skii s9aces to prove these reduced orders of convergence.
Chapter 5 reports numerical experiments which indicate that the order
of convergence can be restored 'by using an appropriate non-uniform grid.
Such grids may be generated automatically by an adaptive method. This method uses the characterisation of the product integration solution as an
PREFACE
ACKNOWLEDGEMENTS ABSTRACT
INDEX OF NOTATIONS
CHAPTER 1: PROLOGUE
TABLE OF CONTENTS
( i)
(ii) ( iii)
(vii )
1. Introduction 1
CHAPTER 2:
CHAPTER 3:
CHAPTER 4:
2. Smoothness of Solutions of Second Kind Equations 7
3. Notes and Remarks 16
GALERKIN METHODS 1. Introduction
2. Global Superconvergence 3. Local Superconvergence
4. Comments and Remarks
DISCRETE GALERKIN METHODS 1. Introduction
2. Quadrature Estimates
3. Error Estimates for Discrete Methods 4. Notes and Remarks
PRODUCT INTEGRATION FOR WEAKLY SINGULAR KERNELS 1. Introduction
2. Estimates for Product Integration 3. Solution of Weakly Singular Equations 4. Comments and Remarks
18 20
23
28
30
32 37
41
42 43
CHAPTER 5: NON-UNIFORM MESHES
1. Introduction
2. A priori Mesh Distributions
3. Adaptive Meshes
4. Notes and Remarks
APPENDIX: NIKOL'SKII SPACES
1. Introduction
2. Spline Approximation in Nikol ' skii Spaces
3. Notes and Remarks
BIBLIOGRAPHY
(vi)
52 53
55
58
67
70
78
INDEX
OF
NOTATIONS
This index lists some notations which are used throughout the thesis. It does not include some of the temporary notation used from time to time.
Operators
I
K
p n
'
pn
F
u
nc
t
i
ons
u
n
*
u n
( k) u
The identity operator.
See equation (1.1) .
A projection operator. See p . l for its use in chapter l , p .19 for its use 1n chapters 2 and 3, and p .43 for its use 1n chapter 4 .
p
=
I - pn n
The kernel function, solution and right hand side of the integral equation (1.2) .
The projection solution (p.l, p . 20); but see also p.50 for its use in section 5. 3.
The iterated projection solution (p.2, p.20), and 1n chapter the product integration solution (p.47).
Function
Spaces
and Norms
II
•
II
L p (St)
' ll· llp,s-2
ck (St) , 11 • 11
,k,oo,[2
CCL (St)
' ll· IICL,oo,s-2
*
wk (St)
' II· llw,k,p,s-2 p
CL
N l (St) ' II · IICL,1,s-2
\) Sp6
(C
,JP r)s
nMiscellaneous
C
Uf;2
In chapter 1 denotes II • 11 . 00
p .8.
p .8.
p .8.
p .70.
p .
7
0
,
p .18.
P.19.
p .8.
The generic constant, p.9, p.19.
The difference operator, p .18.
{xEs-2:x+sESt} , p .8.
A quadrature rule p .34 .
(viii)
Theorem c .n denotes theorem number n of chapter c , theorem n
denotes theorem number n of the current chapter. Similarly with equation
CHAPTER 1
PROLOGUE
1.
Introduction
This thesis analyses certain methods for the numerical solution of linear Fredholm integral equations of the second kind on a finite interval. We suppose that we are given an integral operator K defined by
(1) (Ku) (x) =
1
k (x,~)u(~)d~ • X E I= [O,l] •I
and we wish to approximate the unique function u
0 satisfying the equation
( 2 ) (I-K)u
0
=
fwhere f is a known function and I denotes the identity operator. For the subsequent mathematical analysis we wish to regard (2) as an operator
(X)
equation on L Hence various conditions are placed on · k to ensure that
(X)
K is a compact operator on L But we assume without further explicit
(X) (X)
mention that (2) is
well posed
on L that is for every f EL there(X)
exists a unique u
0 EL such that (2) holds.
(X)
Let S be an n dimensional subspace of L (the
basis
space
)
and n(X)
let P be a projection of L
n onto S n
(2) is a function U E S
n n satisfying
( 3 ) (I-P K)u = P f
n n n
Then a
projection
solution
toSuch approximate solutions have been extensively studied, and their existence,
uniqueness,and rates of convergence are well understood (Krasnosel'skii
et al. [28] , Ikebe [26] and the references given there) . However, following
the suggestion of Sloan et al.
(
[3
7
]
,
[
37
] [39] [
41
]
and [42]) , let us applythe
natural iteration
,
u ~ f +Ku, to u2
u is viewed as an intermediate step in the final calculation of the
n
iterated
p
rojection
solution
( 4) u
*
=
f + Kun n
Although u*
n has been observed to have a higher rate of convergence than u this is not well reflected in the existing error estimates.
n
It is clear that the natural iteration will not damage the order of
convergence obtained; for
( 5) u* - u
n 0
shows
for some constant depending only on K . Further, using (5) and the
compactness of K , Sloan [38] has shown under fairly general conditions that
( 6) jju*-u
II
n 0
Hence the order of convergence of u*
n is greater than that of u n
But i t is well known that (6) is by no means an optimal estimate. It
is easy to see that
( 7 )
u*
n satisfies the equation
( I -KP ) u
*
=
f . n nUnder mild conditions on K and P i t can be shown that KP is a
n n
00
sequence of consistent (K u~Ku for all UEL ) , collectively compact operators n
approximating K. Thus i t follows (Anselone [ 2 ] , Atkinson [ 3 ] )
is uniquely defined by (7) and
( 8)
for some constant C depending only on K.
Now consider the particular example in which
s
lS the set ofn
piecewise polynomials of degree r on a uniform grid and p lS the
n
interpolatory projection defined so that p u interpolates u at the r + l
n
Gauss-Legendre points on each subinterval . Then u is the collocation
n
solution to (2) and u*
n is the product integration solution. It is known
that while i t follows from the results of de Hoag and
Weiss [25] applied to (8) that llu*-u
JI
n 0
assume that k and are smooth. )
-2r-2
=
O (n ) . (Both these estimatesThus the order of convergence of
u* is twice that of u
n n showing that the error bound (6) may be
significantly improved in certain situations.
The higher rate of convergence of u*
n is to some extent surprising.
The O(n -r-1 ) convergence of is optimal in the sense that
is also O(n - r - 1 ) Thus i t is unexpected that
u
n could
be used to generate such a higher order solution. Such faster than optimal
convergence is called
superconver
gence
.
Besides product integration, the best known projection method is the
Galerkin method. Given an appropriate
s
n p n is chosen to be the
orthogonal projection in the L2 sense ("least squares" projection). In
this case there are no existing superconvergence results analogous to those
for product int gration. This obvious gap is filled in chapter 2. When
piecewise polynomials (i.e . splines) of degree r are used as basis functions
i t is shown that
ll
u~-u
-2r-20
JI
=
O(n ) when thekernel and the solution have r+lth derivatives. Moreover, if the kernel
4
diagonal x
=
~ (for example Green 's functions of ordinary differential equations) , then u* will be superconvergent at the knot points, but notn
globally. The basic step in the proof of these results is the application of the Aubin-Nitsche duality argument of the finite element literature
(Strang and Fix [ 43]) .
An essential limitation on Galerkin methods is the necessity to perform the required inner products analytically. In all but the simplest cases this is impossible , and quadrature must be used. The solutions obtained in this
fashion will be called the discrete Galerkin solution and the discrete
iterated Galerkin solution. Chapter 3 gives an error analysis of these two
methods. The main result is that if f and k have 2r+2th
derivatives and if composite quadrature rules of sufficiently high degree
are used, then the discrete iterated Galerkin method has the same
super-convergent behaviour as the (exact) iterated Galerkin method. Such results
are common in the numerical solution of differential equations , but are rare for integral equations.
When discontinuous splines are used the discrete iterated Galerkin method reduces to a Nystrom method, and the results of chapter 3 give the expected orders of convergence under much the same conditions as the standard analysis
(Atkinson [ 3 ]) . However when splines of high continuity are used, the
discrete iterated Galerkin methods are a new class of methods whose convergence has not previously been examined.
Although integral equations with smooth kernels occur in p4actice, they do so infrequently. Thus the final two chapters of the thesis consider product
is that the singularity in the kernel prevents the iterated solution
achieving the full order of superconvergence. Thus, for example, when the
kernel is
(9)
the order of convergence of the collocation solution, O(n -r-1 ) , increases
by only O (n -~)
3
to O ( n - r-
12 )
for product integration (i.e. iteratedcollocation); rather than to O(n -2r-2 ) when the kernel is smooth (de Hoag
and Weiss t25]) . The second and more serious difficulty is that the
singularity of the kernel introduces singularities into the solution at the
endpoints. Thus even if f is smooth, the solution to (2) with kernel (9)
will be of the form
+ "smoother terms"
where and b
0 will in general be nonzero (Richter [34]) . This has
serious consequences for numerical solutions . The order of convergence of
_1.,
the collocation solution on a uniform grid is now O(n 2)
The product integration solution increases this to O(n-1)
has not been proved in existing results.
which is optimal.
however this
In chapter 4 the observed rate of convergence for product integration
is proved. It follows from the results in chapter 4 that if
( 10)
where m is smooth and o(x- ~)
=
lx-~ja-l (O<a<l) then the product· · · h O (n-2a)
6
The prerequisite for proving the results in chapter 4 is an adequate characterization of the smoothness of the solution. This is provided in section 2 of chapter 1. We prove there general results which show that for
the kernel (10) belongs to a particular Nikol'skii space This
means simply that the derivative of the solution satisfies a certain generalized Holder continuity condition. (The appendix gives a self contained exposition of the results we need about Nikol 'skii spaces.)
The main step taken in chapter 4 is a modification of the duality
argument to make i t applicable to product integration. This is essentially an abstraction of the classical proof of the convergence of composite
Gaussian quadrature formulae . The required convergence result for product
integration methods follows by using an approximation theoretic property of l+a.
N
1 in the duality argument to produce the bounds required by the theory of collectively compact operators.
From a practical perspective these results are not encouraging. The convergence for the kernel function (9) is only modest. The final chapter of the thesis, chapter 5, reports some successful numerical
experimentation with ways of increasing the order of convergence by using an appropriate non-uniform mesh.
We consider the second kind equation with kernel (9) and solution
~ ~
=
X+ (
1-x)(which has the typical singularities expected of the solution) . Use of product integration with the mesh points "clustered" around the end points
increases the order of convergence to that expected when the solution is 31..
O(n- ")
set of experiments is with an adaptive method of generating such meshes.
This makes essential use of the fact that product integration is iterated
collocation (for a general kernel (10) with m11 the iteration is not
precisely the natural iteration, but the extension to cover this case is
minor) . Because (5) shows that the error of product integration depends
only on the error of the intermediate collocation solution, we hypothesise
that a grid giving an accurate collocation solution will also give an
accurate product integration solution. A grid for the collocation solution
is generated by successively refining those subintervals on which the
collocation solution has the largest error. But since the actual solution
is unknown the error must be estimated. This is done by comparing the
collocation solution with the more accurate product integration solution.
When the product integration solution is calculated from the collocation
solution on the adaptively generated grid, the order of convergence i s again
that expected with a smooth solution.
2
.
Smoothne
s
s of s
ol
ut
io
n
s
o
f se
cond kind equat
i
ons
The numerical methods discussed in this thesis are based on finding a
good spline approximation to the solution. The existence of such an
approximation cannot be guaranteed unless the solution is sufficiently smooth.
Since the solution is unknown such smoothness has to be deduced from the
behaviour of the right hand side and the kernel. Results of this type are
collected in this section for use in subsequent chapters . Theorems 1 and 2
are straight-forward theorems of this nature; and they are sufficient for
the needs of chapters 2 and 3. The remainder of the section proves the more
involved theorems needed in the study of weakly singular kernels of
convolution type in chapter 4.
8
example Gilbarg and Trudinger [21] ). Note that if the weak derivative is continuous then the function is continuously differentiable (more strictly,
equal a .e . to a continuously differentiable function) and the weak derivative coincides with the usual (strong) derivative.
For any non-trivial compact subinterval n C IR the LP(n) norm lS
written ll · llp,n ; or if n is understood we write LP and ll · llp .
(n may be similarly omitted from all other spaces and norms.) For any
· t k
o
Ck(n)in eger ~ , H denotes the Banach space of functions with k
continuous derivatives under the norm
A number of times we use the fact that
II
·
II
is equi· valent to the normC,k,co
(1) (k)
max{ llull , llu
11
,
...
, ljuII}
.
co co co (CO will also be abbreviated to
C
.
)
For any non-negative real number a , we write a= [a] + a
0 , where
[a] is an integer and O < a
0 $ 1 . Then the space of a-Holder continuous
functions, Ca (n)
*
functions for which
where
and
is the set of all [a] continuously differentiable
l
u
l
a ,co}
< co(6. u) (x) = u(x+E:) - u(x)
E:
Again is equival ent to the norm max { II u II , 11 u ( 1) 11 , · · · , 11 u ([ a
J
)
I ,I
uI }
·
The spaces C k and
C
a
may be generalized to domainsSt
c JR.n , n > 2*
(Kufner et al. [29]). In this case
where
sup sup
s>O e.
l
( 6 . u) ( x)
=
u ( x +s e . ) - u ( x)l,E l
and {e
1, .. ,en} is the canonical basis of JR.n
Throughout this thesis C denotes a generic constant, no two
occurrences of which are necessarily the same. In this section C depends on K and the order of the differences and derivatives involved. However C is independent of u
0 and f and any other functions appearing in the statement of the theorem.
For any function of two variables v(x,~) v (~) = v(x,~)
X
v denotes the function X
Since we are almost exclusively concerned with functions defined on the
unit interval we shall suppress I in writing norms and spaces. With the one specific exception mentioned below 11 • llp ,
Ck
etc . are to be understoodas
II II
• p ,I andCk
(I) etc.THEOREM
l:
Suppo
s
e
o
r
each
X E I .,k
E L 1and
ll
k
)l
l
~ Cuniformly
X
wi
th
r
e
s
pe
ct t
o
X •In
addition assume
f
o
r
some intege
r
Q,
~ 1,
k
(i -1, 0) E L 1and that
f
or
all
E > 0and
'
X E I Ef
Jk(l',-l,O) (x+E,i;) - k(l',-l,O) (x,i;) Jdi; <; CEI
un1., ormly 1.,n
x .Then
K1.,s a bounded operator
L00
~
CQ, (and therefore
10
00
compact on
LJ
•
Hen
e
implies
Proof:
An application of Fubini' s theorem and the definition of weak00
derivative shows that for any u E L Ku is (£-1)-differentiable and (Ku) (Q.-l) (x)
=
f
k (Q.-l,O) (x,I;) u(i;) di; . Furthershows with
Finally as u
0
=
f+
Ku0 ,00
because K is compact implies (I-K) has a bounded inverse on L
00
(Recall (I-K) is well posed on L) .
/Ill
We turn now to a more special class of kernels in which k has the form
( 11)
k(x,~)
=
k1 (x,~)
=
k2 (x,~) ~ ? X
and where for two integers £ and m
- 1 $ m $ £ 0 $ £
'
k E Cm(IXI) and£
kl E C ({(x,~)EIXI:~$x})
(12)
£
k2 E C ({(x,~)EIXI :~?x})
(When m
=
-1 k lS allowed to be discontinuous'
at X=
~)
.
Two obvious examples of such kernels are Green's functions for ordinary
THEOREM
2:
Suppose
khas the form
(11)
with the
conditions
(12)
holding
.
Then
( i)
( ii)
( iii)
Hence if
Proof
:
Then
a bounded operator
1 -+ Cand
compact
1K
i-s
Lon
LCX)
cm
when
m ~ 1 Ki-s a bounded operator
L -+and
'
.,
for
p < ,Q, - 1.,
Ki-s
.
a bounded
operator
cP-+ cp+1f E c£
'
u0 E ci.
The proof of (i) follows by writing
(Ku)
(x)
=
Ix
k1 (x,()u(()d( +
Il
k2(x,()u(()d(0 X
(K
1 u) (x+E) - (K1 u) (x)
=
J,x (k1(x+E,() - k1 (x,())u(()d(0
+
l
x+E
k(x+E,~)u(~)d~
X
I
x+E:~ csl!ull1 + c
lu
(
~
)
la~
.
X
Thus
I
(K1u) (x+E) - (K1u) (x) I-+ 0 as E:-+ 0 . Hence K1u is continuous,
and an elementary argument shows l!K
1 u1!00 < c l!ull 1 . A similar argument shows
K
2 and hence K is bounded L 1
-+
C.
Further as
(1)
rox
(1,0) Jl (1,0)(Ku) (x)
=
Ji
k1 (x,~)u(~)d~ + k2 (x,~)u(~)d~
X
we have that Ku E
w
11 and
+ ~
1 (x,x) - k2 (x,x)Ju(x)
12
embedded in L1 (an immediate corollary of theorem A.7) part (i) follows.
Part (ii) is standard.
If u E Cp then
(
0
x
(1
(Ku) (p+l) (x)
~
J,
kip+l,O) (x,i:;)u(i:;)di:;+
J
k~p+l,O) (x,i:;)u(i:;)di:;X
where
Thus part (iii) follows.
Finally as
uo = f + Ku0 =
we deduce u
0 E ci and
llu(.Q,) 11 ~ 0 00
+
p
l
(b.u)p-i(x)l
i=m+l
k (i,0) ( )
2 x,x
i-m
(I+K+ . . . +K )f + K .Q,-m+ 1 u 0
c llf /1.Q, ,oo + c lluo/100 < Cl/f /1.Q, 00
'
(as (I-K) has a bounded inverse).
Ill/
The remainder of this section studies operators of convolution type.
That is we suppose the kernel function k is of the form
( 13) where
Al : for some a , with O < a ~ 1 , o E Na
1 and
A2: m E C 2 (
rxr)
.
(Since O is required to be defined on [ -1,1] we take the expressions a
o E N
1 to refer to [ -1,1] as the domain.) A typical example
sufficient to ensure that K is compact L ~
C
(see Zabreyko et al. [47]p .91 and Graham and Sloan [23]) .
Finally, before proving the main regularity result, theorem 6 , and its
preceding lemmas, i t is convenient to introduce the operator L defined by
(Lu) (x) -
J
O(x-~)u(~)d~ .- I
Notice that K may be alternatively defined by
LEMMA
3:
Proof
:
(Ku) (x)
=
(2:: (m u)) (x) .X
Under assumption Al is a bounded operator
For any
s
> 0 and x EIs
( 6 o) ( x-~) u ( ~) d~ ,
s
and hence by Young's inequality
Thus
Another application of Young' s inequality gives
and hence
1
L
as required. ////
LEMMA
4:
Under assumptions Al and A2 K is bounded.s(x)
=
fx
CT(~)d~ .0 1
Then for any u E
w
1
(Ku) (x)
=
{L{mu)){x) X=
-s(x-~)m (~)u(~)~=l
~=O X
+
f
I
( 1)
s (x-~) (m u) (~) d~ . X
Thus Ku is weakly differentiable with
Further
shows
(14)
( 1)
(Ku) (x)
=
- O(x-~)m (~)u(~) X~=l
~=O
~-1
( 1, 0)
- s(x-~)m (~)u(~)
x ~=0
f
s(x-~)m(l,l) (~)u(~)d~I X
~=l
f
~=O I
+
f
I
o (x-~)u(~)m(l,O) (~)d~ X
(Ku) ( l) (x)
=
~=l
O(x-~)u(~)m (~) X
~=O
+ (Z::(m u(l)) (x) + (Z::(m(l,O)u)) (x)
X X
14
Now to prove K is bounded it is required to show that for each of the terms, T. '
11
6
T.II
S 1 l,Is
But for the first term this follows by using theorem A.4 and Leibnitz's
formula for differences to show
The second term is bounded by observing
(15)
+
I(
L ( ( m -m ) u ( 1) ) ) (x)J
.
L
x+s xNow applying lenuna 3 to the first terms of (6) (that m of lenuna 3 has
X
been replaced by x + s is irrelevant here), leaves only the second terms. But then an application of Fubini's theorem shows
JO
(
x-~)J J
m ( ~) -m ( ~)J
ax]
J
u ( l) ( ~)I
d~
x+S X
which gives the required estimate. The third and fourth terms of (5) are bounded similarly.
THEOREM 5:
Under
•
a
s
umption
Aland
A2.,l+a.
on
N1 .
Proo
:
From theorem A.7Therefore, as lenuna 4 shows compact.
the inclusion l+a.
1
K ~s
a compact ope
r
ator
is compact. is bounded, is also
16
The assumption that m E C 2 ( IXI) can be slightly relaxed. It suffices to assume that there is a bounded subset of containing, for any
~ . (1,0)( )
choice of x and s , the functions m x,• m (0,1) ( X, • )
m(l,O) (•
,
F;,
)
and m(O,l) (•,F;,). The above proofs carry through with onlyminor modifications.
THEOREM
6
:
Suppose
Ksatisfies
Aland
A2.and
Then
f
E N1 +ex1
implies
1 +ex
u0 E Nl
Proof
:
If 1 is not an eigenvalue of K considered as an operator onC
i t is not an eigenvalue of K considered as an operator on N 1 +ex (because
1 1 +ex
Nl
CC)
.
Therefore by theorem 5 and the Fredholm alternative, there is a unique such that (I-K)u0
=
f and1 +ex
if f E Nl
II u O 111 +ex , 1
~
c
11 f 111 +ex , 1 andC
must coincide.Again since Nl 1 +ex
CC
'
the solutions inIll/
Consider application of theorem 6 to the particular kernel function (9). Assumptions Al and A2 are satisfied with ex=
12
.
Thus by theorem 6,3
for f sufficiently smooth, u
0 E
N{
2
• But this is precisely the result
expected from the expansion for uo obtained from Richter [34] ; for the function X 1/2 E N 3/2 but 1/2 ~ NB when B > 3/2 Thus theorem 6 is the
1 ' X 1
.
best possible result in the sense that no matter how smooth f 1 +ex
'
u0 E Nlbut B> l + e x .
3.
Notes and Remarks
1) The introduction of the natural iteration for general projection
methods is due to Sloan. However i t had been previously used implicitly in
the product integration method, and is similar to the natural interpolation
2) The methods of theorems 4-6 can be modified to prove more general results when the integral equation is not well posed . Following theorem 4, i t can be proved under Al and A2 that for
B
~ 1 , U E implies2
116
Kui!1 I€ ' 2E
< a+BI I
CE u B, l .
Then provided a+B ~ 1 , the reiteration theorem (Butzer and Berens
l
161p .259, and making suitable modifications to the unit interval I , instead of IR) shows Ku E Nl a+B
.
Hence when a lS irrational , we have the chainimplications, Ll ~ Ku a =} 2 2a m ma
of u E E Nl K u E Nl I • • • K u E Nl I where m
lS the smallest integer with ma > 1 ( If the a of Al lS rational,
choose a ' irrational s . t . ma > 1 implies ma' > 1 and use the above a ' instead of
.
) Thus ma 1 we haveargument on a as Nl C
w
1 I
(m+l) (l+a)
if (I-K)u
=
l+a implies l+aK u
0 E Nl Thus f I f E Nl uo E Nl
0
whether or not uo lS a unique solution of the integral equation. For
example, this argument shows the eigenvalues of K belong to The reiteration theorem however is not elementary.
3) The regularity of the solutions of convolution type integral
equations have also been studied in Richter [34] , MacCamy [30], Schneider [ 36]
and Graham [22] . See also the discussion of Mayers [32] and Baker [6].
4) A comparison of the convergence of projection, iterated projection
and other classes of methods for eigenvalue problems in an abstract setting
is contained in Chatelin (18] and the references given there. However explicit
orders of convergence are not derived. The natural iteration is discussed from
more general perspectives in the reviews of Noble [ 33] and Sloan [40] . A
sununary of various superconvergence phenomena for collocation solutions to
various classes of integral and integro-differential equations is contained
18
CHAPTER 2
GALERKIN METHODS
1.
Introduction
In addition to the assumption that the second kind integral equation is
well-posed, we assume that
Hl: for all X E I ,
JJk)i 1 ::; C and
k
X
1
E L
co
and uniformly with respect to X '
Hypothesis Hl ensures that K L ~
C
is compact (Zabreyko [47 ] , Graham and Sloan [ 23]) , but still admits a large class of kernels. In order to prove the superconvergence results of this chapter much stronger conditionsmust be imposed . Thus we will further assume
H2 : there exists a positive integer £ such that for each
X E I , kx E w£
1 and JJk)lw,£,l is bounded uniformly with
respect to x .
Let 6 be a partition, 0
=
x0 < x1 < ... < xn
=
1 , of t he uni t interval. Let I. = [x.1,x.
J
and h. = x .-
x . 1.
Let h = max (h. ) andl i - l l l i - l
let a = max (h.) / min (h.) . For any integers r and \) such that r > 0
n l l
and -1 $ \) $ r let Sp6
(C
\) ,JP r) denote the set of functions ¢ such t hat( i)
( ii)
for each l ' E JP r
degree ::; r) and
if v ~ 0 then
¢
EC
\).
(where JP
If V
=
-1 then a function is possibly discontinuous at X. land difficulties arise in the definition of ¢(x.)
l Any sensible convention
will do, but for definiteness it is assumed that ¢ is continuous from the right and continuous from the left at 1 .
The set Sp6
(C
\) ,JP r) will be called thecontinuity
v
.
For simplicity we shall writesplines of degree
s
n for
r
and
when no
confusion can occur. The points x.
l will be cal led
knot points
.
Throughoutchapters 2 and 3 P denotes the orthogonal projection of L2 onto S
n n
Finally we assume in this chapter and the next that the partitions 6
are quasi-uniform: that is for some value of
o
~ 1 which remains fixed,o
~o
for all partitions 6n The generic constant C introduced in
chapter 1 is now allowed to depend on r , V., and
o
,
but is otherwise independent of the partition.The required approximation theoretic properties of
the following lemma.
LEMMA 1
:
( i) For all( ii) For all
r+l
U E Wl
U E cr+l
*
II u-¢ 1100 <
there exists ¢ E S
n
r+l,l
there exists ¢ E
s
n
r+1
I I
Ch u r+l,oo
( iii) For 1 ~ p ~ CX) p lS a bounded map
LP
n
where C lS independent of p and 6
.
s
n are stated in
such that
such that
+
LP
with !IP nII
< C,Proo
:
Parts (i) and (ii) follow from de Boor and Fix [10] , part (iii) fromSince P' (P' denotes (I-P )) is bounded on LP , and since
n n n
P' cp
=
0n for any cp E S n
1/P 'ul/
=
1/P' (u-cp) II $ IIP' II llu-¢11 ·n p n n p
Thus the estimates in (i) and (ii) hold for cp
=
p u n2.
Global
Superconvergence
20
The
Galerkin
solution
to the second kind equation (1.2) is defined by( 1) U E S
n n
The proof of the convergence of which are required in section 3.
u
n
(I-P K) u
=
P fn n n
is well known; and we state results
THEOREM
2
:
Suppose
Hlholds and
u0 E c:+l
Then for
hsufficiently
small
the
Galerkin solution
is uniquely defined
by
(1)and
r+1
I I
llu n -uoll oo :s; Ch uO r+ 1 ,oo .
Proof
:
The proof follows from Krasnosel'skii et al.[28] p.210 and theirlemma 15.4 p .212; using lemma 1 to verify the appropriate conditions. ////
Recall from the introduction that the
iterated
Galerkin
solution~
is defined by( 2)
It may be readily verified that
( 3)
u*
=
f+
Kun n
u* satisfies
n
( I -KP ) u *
=
f .n n
The following lemma shows that (2) and (3) are equivalent definitions of u*
n '
3
:
Equation (1) has a unique solution for every f iff (3)has a unique solution for every f .
Proof
:
If u is a solution of (1) then f+
Ku is a solution of (3)n n
and if u* is a solution of (3) then Pu* is a solution of (1). Thus (1)
n n n
has a solution for every f if and only if (3) does. But I - p K lS a n
linear operator on the finite dimensional space
s
'
n and (3) is equivalent to the linear equation
( I -KP ) v
=
KP f n n n 'on the finite dimensional space KS n
U
=
f + Vn n '
Thus for both (1) and (3) the
condition that there exists a solution for every value of the right hand side is equivalent to the condition that there exists a unique solution for every
value of the right hand side.
Ill/
Given the equivalence of (2) and (3) , either equation may be used as the basis of an error analysis . In this section we use (3).
THEOREM 4
:
Asswne
Hland that
H2holds for some
positive
i
,
V < £ ~ r+
1 .Then
for
hsufficiently small
u*is
uniquely
n
defined by
(
3).,and if
uC
r+l0 E
*
then
00 00
Proof
:
The operators KP 'n L -+- L converge in norm.
00
u E L
For if
(4) ( KP I u) ( X)
=
(
k , p I u)= (
p I k p I u )= (
p I k , u)n x n n x' n n x
and thus by lemma 1 and H2 ,
22
Hence it is standard to show from (3) that
But again by (4) and lemma 1 ,
II KP I uo 11 ~ C II p I k 111 II p I u O II
n
00n
x
n
oor+1+i 1
I
~ Ch
u
0 l .r+ ,oo
/Ill
The crucial step in theorem 4 is (4). This is the Aubin-Nitsche duality
argument from the finite element literature.
C
r+l .To apply theorem 4 i t is necessary to verify the hypothesis u
0 E
*
This is most easily done if for some constant C independent of x ,
(5)
(
I
k ( r ' O) ( x+E , ~) - k ( r 'O) ( x, ~)I
d~~
CEJI
Theorem 1.1 then shows u
C
r+l .0 E * Thus we have the following theorem:
THEOREM 5:
A
ss
ume
Hl ., (5) .,and
t
hat
H2holds
f
o
r
Q,=
r
+
1Then
J
l
u*-u
II
< Ch 2r+2 J fI
.
n
O
00 r+l,00/Ill
Alternatively the smoothness of u
0 may be inferred if k has the special structure (1.11) . Thus suppose k i s the Green's function defined by
k(x, E)
=
(e~-1) (ex-l_l) (1-e- 1)e~( 6)
C
r+l cr+l . Then theorem 1.2 shows that f E * implies u0 E * Whence as
kx E W~ , a direct application of theorem 4 with £
=
1 showsll
u*-uII
~
Chr+2 If In O 00 r+l,00 '
provided the continuity of the splines is selected so that V
=
-1 or V=
0 . In fact more is true. A direct argument shows there existsV
¢
E sp6
(C
,IPr) for V=
- 1 , or V=
0 and r ~ 1 , such that2
< Ch .
Use of this estimate in the proof of theorem 4 shows
( 7) 1/u*-u
II
~
Chr+3 lfl1 . n O 00 r+ ,oo
3.
Local Superconvergence
Section 2 gave an order of convergence result for the. iterated Galerkin method using equation (3). This section uses equations (1) and (2) instead, and makes estimates directly from the relation (see equation (1.5))
u*-u n 0
This analysis yields better error bounds for the iterated Galerkin solution at the knot points when the kernel has the discontinuities typified by (6).
1ve assume (as in (1.11) and (1.12)) t hat
( 8)
24
-1 $ m $ !l
'
0 $ !l'
k E Cm(IXI)'
Q,
E;, x})
( 9) kl E
C ({
(x,E;,) E I X I $ andQ,
E;, x})
k
2 E C ({(x,E;,) E I X I ~
Define the adjoint operator K* by
-- J,l
K*u(x) k(f;,,x)u(E;,)df;, .
0
LEMMA 6:
I - K* is well posed on L 00Proof
:
Under the conditions (9) K maps L1~
C and K is compact on L100
and L
posed on
00
u E L
(theorem 1. 2) . Hence, as K
1
L (If u E L 1 satisfied
00
is well-posed on L K is well
(I-K)u
=
0 , u=
Ku implies and thus u=
0). Therefore, as the integral operator K* is also the Banach space adjoint operator of K on (L1)*=
L00 the Fredholm alternative (Yosida [46]) shows that K* is well posed on L 00/Ill
Lemma 6 shows that for each x E I there exists a unique function g E L
X
00
such that
(I-K*)g
=
kX X
The structure of is given in the following lemma.
used to denote the function
E;,l
=
E;,l+
=
0 E;, < 0 .The notation E;,l
+ lS
LEMMA 7:
Let k be a kernel of the form (8) with conditions (9) holding.Then for each x EI there exist constants am+l(x) , ... ,aQ,(x)
function
¢
defined byX
<P (~)
=
X
has the properties
(10) Q,
l
i=m+l and la.(x)(~-x)
l
+
for some constant C independent of x .
Proo
f:
Letµ
= max{m,O} . Theng
=
k + K*gX X X
Q-1µ = (I+K*+ ... +(K*) " )k
X
As theorem 1.2 shows (K*)Q,-1µ+lg
X
Q,
E C ,
+ (K*) Q,-1µ+lg X
II (g - (I+K*+ ... + (K*) Q,-1µ) k ) (Q,) II
~
c llgxlloo < CX X oo
(by lemma 6 and the Fredholm alternative, I - K* has a bounded inverse on
00
L and Ilg II
~
ll (I-K*)-111 Ilk II~
C).X oo X oo Since k X and K* are known, there
is now no difficulty in principle in writing down the form of the
discontinuities in (i.e. of (I+K*+ ... +(K*)
t-w
)k ) . Xmanipulations are outlined briefly.
( 11)
where
Define \l' by
X
Q,
\l' (~) =
X
l
i=m+l
l
b. (x) (~-x)
l +
b. (x) = .1, (k
2(0,i) (x,x)
l l .
Then k - \l' E CQ, and theorem 1.2 shows
X X
(12) g - (I+K*+ ... +(K*) Q,-1µ)\l' E C Q, •
X X
Now define an operator R by
( 13) ( Ru) ( ~) =
J
\l' (~)u (T) dT .I T
26
Then as k
T
Q,
\PT EC ' (K*-R) is a bounded map
00 Q,
L -+
C
.
Thus writingK* = (K*-R) + Rq J.n ( 12) and using theorem 1. 2 to neglect terms of the form
shows
(14) g - (I+R+ ... +R
£-µ
)\¥ EC !l .X X
Now lemma 8 below shows that for any i < £
Q, .
l
R((•-x)) -
l
c .. (x)(•-x)J E C Q, •+
. . 2 lJ +J=m+i+
Thus by the definition of \¥
X in ( 11)
i=2m+3
dl. (x) (~-x) l E
C,Q,
l +
where
i-m-2
dli (x) =
I
j=m+l
c .. (x)b.(x)
Jl J
Using RP= R(Rp-l) and proceeding inductively gives
( 15)
where
Q,
l
i= (p+l)(m+l)-1
i-m-2
l
d .(x)( •-x)
pl +
d . ( x)
=
l
c .. ( x) d1. ( x)
pi i=p(m+l)-1 Jl p- J
The required expression for
cp
X is obtained by substituting (15) in
(14) and collecting terms. The bound (10) follows from an inspection of the
terms in which were successively neglected in the above proof.
/Ill
To complete the proof of lemma 7 we prove the promised lemma.
LEMMA
8:
Let R be defined by (13) and (11), and suppose the conditions oflemma 7 hold. Then for all i , 0 ~ i ~ Q, , there exist constants
c. .
2 ( x) , ... c. 0 ( x) such that
Proof
:
Q,
l
R( (•-x) ) -
l
+
j=m+i+2 C , . lJ (x) (•-x)+J E CQ, •A direct computation shows
Q,
l
j=m+l
9,,-i-l
=
l
j=m+l
b. (T) (t,;-T) J (T-x) 1dT
J
.
.
I J
+
+
c- i+j+l
( s-x)
+
J
b.(x+(E,:-x)T) (1-T)JT1
dT
I J
Since b. E
C
£
-i
, the Taylor expansion of b.l about x shows that the
l
function
J
I b. (x+(E,:-x)T) J (1-T) JT1dT!l-(i+j+l) b~k)
l
(E,:-x)k _J~k=O k !
(1 . . k
J
(1-T)JTl+ dT0
lS at
t,;
=
X . Thus collecting powers of (E,:-x)+gives lemma 8 with
C . . ( X)
=
l ]
j-i-m-2 b(k)
I
j-i-k-1k!
k=O
j-i-k-1 i+k
( 1-T) T dT
If the point x of lemma 7 happens to be a knot point X. I l
Thus applying lemma 1 to shows that
IIP'g 11
1
~
Ch!l+l . This is not true for an arbitrary point x .n xi
then
i n ( 16)
Ill/
Given the structure of the proof of the local superconvergence
result follows by the duality argument and theorem 2 .
THEOREM 9:
Suppo
s
e the ke
r
nel
k ~o the
f
orm
(8)with condition
s
(9)hold
i
ng
o
r
v
s
m
s i s
r+
1po
int
x . .,l
where the constant
Proof
:
SinceI
u * ( X. ) - uo ( X. )I
n l i
C bS
independent
of
X. • l=
K (u -u0) (x.)
n ~ = (k X, ,u -uo) n l
=
(g , (I-K) (u -u0))
xi n
lu*(x.) - u (x.)
I
n l O l = !(P'g n x. ,Pn '(I-K)(u n -u0))! l
28
Theorem 9 now follows from theorem 2 and the remarks given after
lemma 8.
Ill/
Because of the special form of k , there is no difficulty in
verifying the requisite smoothness of Thus, if f E . cr+l and condition
(9) holds for £ = r + l , then by theorem 1.2. In particular
for the kernel (6), the iterated Galerkin solution exhibits the full
O(h 2r+2) superconvergence at the knots, whereas globally i t is only O(hr+3).
For example , if cubic splines (i .e . sp 6 (c
0
,JP
3)) are used, O(h
8
) convergence
occurs at the knot points, as opposed to the O(h6) proved globally.
4.
Comments
and Remarks
1) If the kernel function satisfies H2 , i t is a simple matter to show
£ gx E
w
1 . An alternative proof of theorem 4 can be given using the methods
of section 3.
2) Chapter
a
depends heavily on the non-trivial theorem that00
p
n is
equation in L2 , then this result is not needed. The inner product
(P'k ,P'u) in the proof of theorem 4 may be bounded by
n x n 0
However this approach leads to an inferior rate of convergence for the kernel
( 6) rather than On the other hand if we choose a
basis space for which a result analogous to lemma l(iii) is not known, then
the L2 approach must be used.
3) The duality argument of this chapter has also been used by
Richter [35] to prove O(hr+2) superconvergence of u
n at the
Gauss-Legendre points on each subinterval when splines of low continuity are
used.
4) If
can be constructed directly from
** cr+l
then a high order spline un E sp
6 ( ,JP2r+l)
u
n by the process of superinterpolation
without using the natural iteration. If u
0 E
C
2r+2, then liu** - u
01i
=
O(h 2r+2)
* n oo
30
CHAPTER 3
DISCRETE
GALERKIN METHODS
1.
Introduction
In the actual computation of the Galerkin solution, the first step is to
choose a basis (¢.) for S
i n Then u n is found as the solution of the
matrix equation
( 1) (A-B)n
=
awhere
A .. = (¢. ,¢ .)
lJ J l B l ] . .
=
(
K¢ J . , ¢ l . )a.
= (
f, ¢. ) and u=
'
n .
¢. .i i n
l
i il
However i t may be impossible or undesirable to perform analytically the
integrations required to evaluate B . .
l ] and a. l exactly . . Quadrature
formulae wil l then be needed; firstly to evaluate the two dimensional
integrals
and secondly the one dimensional integrals
f ( ~) ¢ . ( ~) d~ . l
The function u given by (1) when the coefficients are calculated in this n
fashion will be called the
di
r
ete
Galerkin °olution
.
Given the discr et eGalerkin solution, further quadrature wi l l be needed to calculate t he natural
iteration. The result of this calculati on will be called the
discrete
The choice of appropriate quadrature methods will depend on the
smoothness of k . When k is smooth, a simple quadrature formula of the form
( 2) B . .
:-
~
I
w k ( X ' E;, ) cp . ( E;, ) cp . ( X )l ] ~ V V V J V l V
V
can be used satisfactorily. Such a procedure can be applied automatically for all sufficiently smooth kernels , and no preliminary analytic integration will be necessary if k is changed. However, for the case in which k is not sufficiently smooth, such an automatic procedure will be more difficult to obtain. Some preliminary analysis will usually be necessary for different kernel s .
This chapter considers only the automatic means of integration using composite quadrature formulae of the form (2) (and their one dimensional analogues) : for example composite Gauss-Legendre rules . The required
regularity for k will be imposed by assuming that for some integer £ ~ 1 ,
( 3)
We further assume that
(4)
By theorem 1.1 this implies and
32
the orders of convergence of the discrete and exact methods coincide. Thus,
in the terminology of Herbold, Schultz and Varga [24] , we need to determine
I
which quadrature rules are
consistent
with the error estimates of section 2 of chapter 2.In section 3 i t is shown that quadrature formulae of sufficiently high degree are consistent for the iterated Galerkin solution. Section 2 describes precisely the quadrature rules used and proves some preliminary results.
2
.
Q
u
adrat
ur
e E
sti
ma
t
es
Throughout this chapter i t is necessary to bound the coefficients of polynomial spl ines. This is most conveniently done by bounding the higher derivatives of the splines , except that the spline or its derivatives are generally discontinuous at the knots. Thus we introduce the modified Sobolev norms defined for ¢ES by
n
n
I
i=l and
t
lSince ¢ E S
n the Nikol 'skii semi-norm J¢ lk,l,I. and the Sobolev
semi-i
norm l¢lw k
1 I· are equivalent, and no confusion is caused by writing
, , , l
l ~I ~ k ,1,6 instead of J~I ~ W,k,1,6 . Analogously for the supremum norm define
We use this notation in stating some stronger properties of spline
approximation than were used in chapter 2.
LEMMA 1
:
(i) If p=
1 or p=
00 then for all and j ::; r ,( i i) For all
( iii) If U E and satisfies
II
r+11I
u-¢ 1100 ::; Ch u r+ l ,oo
then for all J ::; r ,
In particular
IIP
'
ull.
A ::;clluJ
J
1 · n J ,00,u r+ ,oo
Proo
:
On the linear space of polynomials on 10,1] the norm Jl · llp isequivalent to the norm 11 · 11* defined by
where
cp
(
x)In addition the semi- norms \ • \ and
~,7, j , p
are equivalent. Therefore
(5)
::;
c
I¢ I .
*
<c
Jj¢JI
*
Thus, for a polynomial,
cp
'
on I. ,l
34
transform to the polynomial cp(x)
=
cp(x.1+h.x) on I . Applying (5) to
cp
and transforming back to i - lI. gives
l
< Ch~J
//cpl!
l p,I.
l
Summing over i for p
=
1 , gives (i) . Part (ii) follows by the samemethod, and (iii) follows simply from (i) .
/Ill
To calculate the two dimensional integrals required by the Galerkin
equations , select a finite set {t}
\) of distinct points in I x I ,
Choose a corresponding set of weights
quadrature formula
(
u -
I
w
U(t)jI xI \) \) \)
{w}
such that the \)is exact for polynomials of degree a . Then for any subregion
I.
XI. CI XI
'
l J let t l J \ ) . .
= (
X l. - l , X . J - l)+
(h . t l \) l .>h.,.t
2).
J \) Define
the composite quadrature rule of degree a on the partition X 6, of I X I , by
Let E .. (U) l ]
=
n
l
i ' j=l
t
.XI. Ul J
I~.(U)
l ]
n
I .. (
U)l ]
I
nbe the error in on I. x I . .
l J
Q,
I~.
(U)=
l
l ]
\)
h.h.w U(t .. )
l J \) l J \ )
It is well known that if
u
E C ( I . XI . )*
l Jthen there exists a two variable polynomial of degree
Q, - 1 , ¢ E JPQ,-l , such that
II
U-
cp
1100, I. XI . l JQ,
< Ch
I
u
I
Q, 00 • I(See, for example , the remarks at the end of section 1 of the appendix.) If
( 6)
IE ..
(U)I
lJ
= jE .. (U-lJ
¢)j.Q,+2
I
I
~ Ch U .Q,,oo,I .XI . .
l J
This inequality is the basis of our subsequent error estimates . ((6) is
merely a particular case of the Bramble-Hilbert lemma. See Bramble and
Hilbert [ 12] .)
Define a discrete operator
u E
C)
to be the element ofs
n
K :
C
-+s
n n by setting K u n
satisfying, for all
q>
E S ,n
(for any
( 7) (Ku,¢) = In(ku¢)
n
(In (7), and subsequently, the notation ku¢ will be used for the function
(x, ~)-+ k(x,~)u(~)¢(x) . This abuse simplifies subsequent formulae and
causes little confusion.) That Ku is uniquely defined follows by writing
n
Ku=
la.¢.
,
where the vectorn . i i
l
whose coefficient matrix is the
considered as an operator on
s
n
(a .) satisfies a system of linear equations
l
(invertible) Gram matrix [.(¢. ,¢. ) ] . When
J l
K - PK will be denoted by (K -PK)
I
n n n n n
LEMMA 2
:
If k c c C.Q, (IXI) , wi 'th N n ~a + 1 , then for allW
,
¢ES n*
( i) j((K -K) W,¢)1
n and
If in addition a + 1 > .Q, ~ 2r + 1 , then
where 11 • II denotes the norm of an operator on the space
s
n
the supremum norm.