Multiscale Numerical Simulation of Fluid-Solid Interaction
Yohei Inoue
1;2, Junji Tanaka
1;2;*, Ryo Kobayashi
1;2, Shuji Ogata
1;2and Toshiyuki Gotoh
1;21Department of Scientific and Engineering Simulation, Graduate School of Engineering, Nagoya Institute of Technology, Nagoya 466-8555, Japan
2
JST-CREST, Japan Science and Technology Agency, Kawaguchi 332-0012, Japan
A new multiscale numerical method is developed to simulate the fluid-solid interaction. The solid motion is described by coarse grained particles which are generated by consolidation of harmonically interacting atoms, and the fluid motion is by the lattice Boltzmann method. Since the characteristic time of the fluid motion is much longer than that of the coarse grained particles, the momentum change due to the rapid collision of the coarse grained particles at the interface is accumulated over a certain time duration and then passed the fluid motion. The method is applied to an elastic rod fixed on the wall in the two dimensional Poiseuille flow. The oscillation and stress within the rod as well as the velocity and vorticity of the fluid are examined with respect to the vortex shedding at the top of the rod. Also the method is applied to the problem of fluid transfer by multiple elastic rods. It is found that the results are quite reasonable and that the present method is effective in dealing with the fluid-solid interactions. [doi:10.2320/matertrans.MB200814]
(Received May 7, 2008; Accepted August 1, 2008; Published October 3, 2008)
Keywords: coarse grained particle, lattice Boltzmann method, fluid-solid interaction
1. Introduction
Problem of interaction between fluid and solid structure composed of soft and/or hard materials has been attracting a great deal of attention in many areas of engineering and bio/ chemical sciences. MEMS and NEMS (Micro (or
Nano)-Electro Mechanical System)1)such as micro or nano scale
fluid pump or flow meter are rapidly growing areas in micro scale engineering. Since characteristic spatial and time scales in these devices are very small, the surface phenomena including chemical reaction, thermal noise, and even the molecular structure of the solid and fluid become important factors in designing and fabricating those devices. In some devices the mass transfer by fluid is quite common and key process. Therefore it is very important to analyze the interaction between fluid and solid, but the conventional continuum approaches using macroscopic parameters such as elasticity, heat conductivity, and so on, become sometimes insufficient to accurately describe the behavior of solid (and even fluid) and the interaction between the two phases. For example, a single wall carbon nano tube (SWCNT) has a diameter 20 to 50 [nm] and about 100 times the diameter in length, and anisotropy in various material characteristics is expected. Also SWCNT is so easily bent that it can be used to make a nano scale flow meter, but neither precise response to the external forces nor the macroscopic elastic constants are known. This motivates us to numerically simulate the interaction from the microscopic view point, although there is a huge gap in scales between fluid motion and atoms in the solid.
The aim of present study is to develop a multiscale numerical method which can bridge over the huge gap in scales of the above problems and to explore its computational feasibility by applying to a few test problems. Our strategy is first to develop a fast efficient method to extract a coarse grained equation of motion of atoms up to a length scale at which matching to the fluid motion is reasonably possible.
This is achieved by the recursive coarse grained particle method, which is described in Sec. 2. The second step is to describe the fluid motion. There are two ways, one is to use the conventional Navier Stokes equation for the viscous fluid and the other is to use the lattice Boltzmann method which is very simple and has advantage in parallel computation and described in Secs. 3 and 4. The third step is to develop a method which connects both dynamics at the interface and must include a process to mediate the gap in time scales between two dynamics. This is explained in Sec. 5. The numerical computation is made for the rod(s) composed of the coarse grained particles which is fixed in the 2-dimen-sional Poiseuille flow. Although the results are qualitative rather than quantitative and limited to 2-dimensions, they are satisfactory enough to encourage us to proceed further development of the method in 3-dimensions where more quantitative assessment is possible.
2. Coarse Grained Particle Method
In molecular dynamics (MD), degrees of freedom under the consideration are those of particles representing atoms or molecules with prescribed characteristics which are derived by the quantum mechanical computation or modeled by phenomenological potential with a few number of parame-ters. In order to connect the motion of atoms to that of fluid we introduce the coarse grained particle method (CGP method) for solid which has been invented by Rudd and Broughton2,3)and developed also by Ogataet al.4,5)Key idea
is a consolidation of the harmonically interacting atoms under the thermal equilibrium. Here we briefly sketch the method, and its details and numerical performance can be seen in Ogataet al.4–7)
In the CGP method for the solid material, the Hamiltonian of atoms under the phonon approximation is written as
Hatom¼
XN
p2
2m
þX
N
;
1
2uCu; ð1Þ
where m, u, and p are mass, displacement vector, and
momentum of the atom, respectively, andCis the elastic
*Graduate Student, Nagoya Institute of Technology, Present address: AISIN AW Co. Ltd., Anjo 444-1192, Japan
matrix between the atomsand. Reduction of the degrees of freedom of atoms is achieved through the ensemble average over the thermal equilibrium
HCG¼
1
Z
YN
Z Z
dudp
!
Hatomexp
Hatom
kBT
ð2Þ
under the constraint
¼Y
NCG
i
Ui
XN
i;u
! UU_i
XN
i;
_ p
p
m
! ; ð3Þ
where HCG is the Hamiltonian of coarse grained particle
(CGP) system, NCG the number of CGPs, ðxÞ the delta
function,Zthe partition function,kBthe Boltzmann constant,
and T is the temperature. The weight function i; which
relates Ui to u corresponds to the inverse of the shape
function in the finite element method, and can easily be
constructed in terms of the shape function. HCG can be
computed analytically as
HCG¼Hintþ
1 2
XNCG
i6¼j
ðUU_iMijUU_jþUiKijUjÞ; ð4Þ
Hint3ðNNCGÞkBT; ð5Þ
where UU_ ¼dU=dt, Kij¼P;ði;C1j;tÞ1 is the
stiffness matrix for the CGP system, and Mij¼
P
;ði;m1j;tÞ1 is the mass matrix andm¼m.
It should be noted that the renormalized matricesMandKdo not depend on the temperature because of the phonon approximation.
The CGP method described above needs to compute
C1
, which requiresOðN
3Þoperations. Therefore, a
straight-forward application of the CGP method to a system of the large number of atoms at one time requires large computa-tional resources. One way to reduce the computacomputa-tional work is to apply the CGP method to a system with a relatively small number of atoms and to enlarge the resulting object by expanding periodically, and to recursively apply the CGP method to thus generated system until the system size becomes a desired large scale. A measure of the coarse graining in space is then given by the ratio¼xCG=xMD,
wherexCG andxMD are the grid distances of the CGPs
and atoms, respectively. This scheme is in essence very similar to the idea of the renormalization group and called
recursive CGP method (RCGP method).6)
Characteristics of the CGP method are
(1) The CGP method introduces a weight function under the phonon approximation, therefore the accuracy is controllable and error is expected to be small.
(2) Degree of coarse graining can be tuned at any order. When it is small, the CGP reduces to the original atom, thus the CGP method is transparent and suitable to develop a hybrid approach bridging over the different scales of motion.
(3) Recursive use of the CGP method (RCGP method) makes it possible to connect the dynamics of atoms to that of the fluid motion with reasonable computa-tional cost.
As a preliminary test of the RCGP method, we have computed a motion of a 2-dimensional rod fixed on a rigid wall as shown in Fig. 1. The rod is composed of 500
(Nx¼10,Ny¼50) CGPs, each of which is a consolidation
of the argon atoms with the coarse graining ratio¼1024. All the quantities in the CGP computation are expressed in the Hartree atomic unit, in which the fundamental quantities
mAU;lAU;tAU;uAUare
mAU¼9:1091031 [kg];
lAU¼5:2921011 [m];
tAU¼2:4181017 [s];
uAU¼2:189106 [m/s];
respectively. Initially, momentumPx¼105is applied to the
[image:2.595.360.489.74.216.2]CGPs at positions higher than the 8th layer from the bottom. The equations of motion of the CGPs are integrated by using the velocity Verlet method.
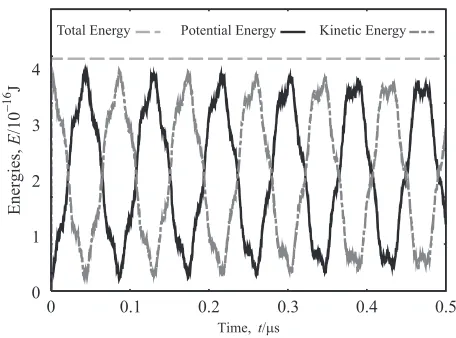
Figure 2 shows that the kinetic and potential energy of the CGPs are oscillating and interchanging alternatively while the total energy is conserved. The period of main oscillation is about 90 [ns]. Figure 3 shows deformation and stress distribution within the rod. The diagonal elements of the stress tensorxx andyy represent local stretch or
compres-sion, while off diagonal components are the shear stresses. It is seen that stretch and compression in y-direction are strongest near the surface in the lower half of the rod. The results are qualitatively reasonable. A more quantitative comparison of the CGP method in 3-dimensions was made
Ny
Nx
Px
Fig. 1 An elastic rod of the CGPs is fixed on the wall and initially the momentumPx¼105is given to all the CGPs at position higher than 8th
layer.
[image:2.595.46.292.108.186.2] [image:2.595.312.540.271.440.2]for the elastic constants. Using the Lennard-Jones potential, we computed the elastic constantsC11,C44, andC12with the
coarse grained ratio ¼1024. When compared with those
computed in terms of the MD computation, the relative error of those constants were found to be within 5, 20 and 10%, respectively, in both 2 and 3 dimensions.
3. Lattice Boltzmann Method
Motion of an incompressible fluid is assumed to be described by the lattice Boltzmann method (LBM), which has recently been developed and found to be very effective for computation of the various complex fluid motion. Advantage of the LBM over the conventional fluid mechanics is that (1) the computational algorithm is so simple that actual implementation on the computer is easy, (2) all of the operation is local in physical space so that parallelization of computation is very efficient.8,9)
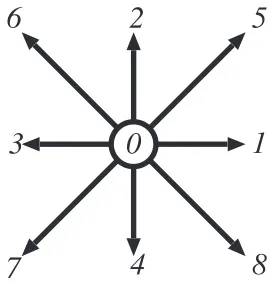
In the LBM, the degrees of freedom of the fluid are represented by ensemble of fluid particles which are assumed to exist only on grid points and allowed to move along
the lines with small number of discrete directions ¼
0;1; ;N and travel to the next grid point in a unit time tLB with prescribed velocity c (see Fig. 4).8,9) In what
follows the length and velocity are nondimensionalized in terms of the grid spacing ~xxLB and the velocity cc~, so that
~
c
ctt~LB¼xx~LB.
Let fðx;tÞ be a distribution function for fluid particles
traveling in the -th direction. Then the density and
momentum are given by
ðx;tÞ ¼X
N
¼0
fðx;tÞ; ð6Þ
ðx;tÞvðx;tÞ ¼X
N
¼0
cfðx;tÞ: ð7Þ
The distribution function with q directions in d spatial
dimensions is referred to as dDqV model. In this study we chose 2D9V model. The evolution of the distribution function is given by
fðxþctLB;tþtLBÞ fðx;tÞ ¼ ½fðx;tÞ
¼ 1
ðfðx;tÞ f
eq
ðx;tÞÞ; ð8Þ
where the left hand side describes the translation and is the collision operator and the so-called BGK
(Bhatnagar-Gross-Krook10)) approximation from the Boltzmann kinetics is
introduced in the second line.is a relaxation parameter and
feq is the local thermal equilibrium distribution function given by
feq¼E 1þ3cvþ
9
2ðcvÞ
23
2vv
; ð9Þ
E0¼
4
9; E¼ 1
9 for ¼1;2;3;4;
E¼
1
36 for¼5;6;7;8 ð10Þ
for 2D9V model which is obtained by expanding the Maxwell Boltzmann distribution function up to the second
order in the fluid velocity. The relaxation parameter is
related to the kinetic viscosity of the fluid as
¼1
3
1 2
: ð11Þ
The equation of motion of the fluid, i.e. the Navier-Stokes equation, can be derived by using the Chapman Enskog expansion, and the reader may consult the references for the detail.8,9) It is well known that the spatial accuracy of the
LBM is the second order in the grid size.
4. Immersed Boundary Method
The macroscopic boundary condition for the fluid phase is assumed to be vðxB;tÞ ¼UB on the boundary whereUB is
the velocity vector of the boundary, and is mesoscopically implemented by imposing the conditions on the distribution function as
fðxB;tþtLBÞ ¼ fðxB;tÞ 2E
cUB
c2
s
; ð12Þ
whereis an index satisfyingc¼ c andEis given by
(10) andcsis the sound velocityc2s ¼c2=3for 2D9V model.
When UB¼0, the above equation means the bounce back
of fluid particle on the rest wall.
When boundary shape of a body is of complex geometry and changes in time, implementation of the above boundary condition and momentum exchange are made in terms of the immersed boundary method (IBM) in this study.11–13)In the IBM, the solid body is regarded as an object which has a distributed force density on its surface so as to match the -200
-150 -100 -50
0 50 100 150 200
σ
xxσ
xyσ
yxσ
yyFig. 3 Stress distribution map inside the rod att¼24:0[ns].
2
6
5
1
8
4
7
3
0
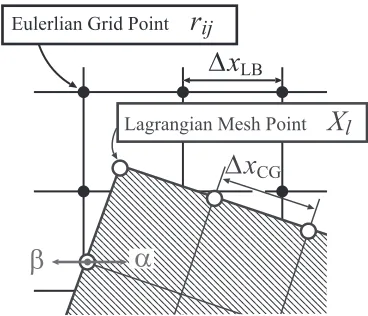
[image:3.595.48.289.71.216.2] [image:3.595.100.237.252.394.2]boundary condition at the body surface. Suppose that the solid surface is described by points which are smoothly
connected each other. Let Xl be a position of the surface
point which is not necessarily on the fluid grid point (see Fig. 5). Then fðXl;tÞis computed from fat the fluid grid
points by using the Lagrangian interpolation
fðXl;tÞ ¼
X
i;j
ðXl;rijÞfðrij;tÞ; ð13Þ
where is the Lagrangian interpolation function andrij is
the position vector of the fluid grid point nearXl.
Assuming that the fluid particles undergo the elastic collision at the solid surface and the density of the body is much larger than that of the fluid particles, we apply the boundary condition (12) atXl. The change of the distribution
function atXlattþtLBis given by
fðXl;tþtLBÞ ¼ fðXl;tþtLBÞ fðXl;tÞ: ð14Þ
Then the momentum change that fluid receives is
gðXl;tþtLBÞ ¼
X
cfðXl;tþtLBÞsl; ð15Þ
where sl is the surface element. The force acting on the
surface is given by g. Since the force density gðXl;tÞ is distributed on the body surface according to eq. (15), the force must be redistributed on the fluid grid points by the linear rule
gðrij;tþtLBÞ
¼X
l
cfðXl;tþtLBÞDijðrijXlÞsl; ð16Þ
whereDijis
DijðrijXlÞ ¼
1
h2h
xijXl
h
h
yijYl
h
; ð17Þ
hðaÞ ¼ 1
4 1þcos a
2
jaj 2
0 otherwise
8 <
: ð18Þ
in 2-dimensions andhis the grid spacing.
When the external force is applied to the fluid, its effect is to appear as change of the velocity of the fluid as
vðx;tþtLBÞ ¼vðx;tÞ þ
tLBF
ð19Þ
which appears in the velocity field in feq
.
In order to examine the accuracy of LBM for fluid motion and IBM for boundary condition, we applied the methods to 2-dimensional flow around a fixed circular cylinder, computed the drag and lift force acting on it, and compared with the results obtained by the finite difference method
(FDM).14)The Reynolds numberRe¼UD=is 20 and 40,
whereis the kinematic viscosity of the fluid,D¼20is the diameter of the cylinder, andU¼0:1. The drag forceFxand
lift force Fy acting on the cylinder are nondimensionalized
and expressed as the drag and lift coefficients:
CD¼
Fx
ðU2DÞ=2; CL¼
Fy
ðU2DÞ=2:
Table 1 shows comparison ofCDcomputed by the present
method with that of the FDM. The values of CD by the
present method tend to be larger around 5% than those of the FDM. One reason for the difference is due to the use of the smoothed kernel function Dij which effectively results in a
hydrodynamic radius slightly larger than the actual radius of the cylinder. It is interesting to note xLB=D0:05,
meaning an increase of 5% in the Reynolds number and a slightly smaller value ofCD, closer to the experimental value.
We would expect that when tends to zero the difference
vanishes. As forCLit is well known that no lift force acts on
the cylinder at these Reynolds numbers, because the flow past cylinder is symmetric about the horizontal line through the cylinder center.
Next we consider two cases at Reynolds number 100; one
is a cylinder fixed in a steady uniform flowU(Case A) and
the other is a moving cylinder with the constant velocityU
in a quiescent flow (Case B). Both cases are physically identical to each other through the Galilean transformation, but the latter is computationally more difficult and is suitable to assess the validity of LBM and IBM. It was found thatCD
was about 1.86 for both cases, which is consistent with the
experimental value. The CL oscillates in time at this
Reynolds number, reflecting the alternative vortex shedding from the cylinder surface (Ka´rma´n’s vortex shedding). The nondimensionalized frequency of the oscillationSt¼fD=U
(Strouhal number), where f is the oscillation frequency,
was found to be about 0.2, again in agreement with the experimental value 0.21. These observations encourage us to use LBM and IBM to study the interaction between solid and fluid from microscopic view point.
5. Coupling between Fluid and Solid
5.1 Characteristic length, time and force in LBM and CGP dynamics
When the fluid motion computed by the LBM and the
[image:4.595.76.260.71.229.2]Fig. 5 Eulerian fluid grid points for the LBM and Lagrangian points for the solid body in the IBM.
Table 1 Comparison of the drag coefficient (CD).
Re Finite Difference Present Relative error (%)
20 2.045 2.139 4.5
[image:4.595.306.550.85.126.2] [image:4.595.51.292.615.750.2]motion of the solid computed by the CGP method are independent of each other, they are numerically integrated in their own length and time scales. However, when they inter-act each other through exchange of momenta at the interface, a physically relevant treatment of the momentum exchange with a mediation of the large gap in space and time scales between the two phases is indispensable. In order to argue those length and time scales, here we consider those quan-tities in the dimensional form which are expressed with (~).
Consider first the fluid motion. In the LBM, the character-istic length and velocity are usually taken to be grid distance xx~LB and the velocitycc~¼
ffiffiffi 3 p
~
c
csfor 2D9V model. Then the
characteristic time is
tt~LB¼ ~xxLB
ffiffiffi 3 p ~ c cs
: ð20Þ
In order eq. (20) to be meaningful, either ~ttLB or xx~LB
must be related to the actual length or time under the consideration. This is achieved by matchingxx~LBto the grid
distance between two adjacent CGPs at the solid surface. Now consider the solid body. The length and time scale of the CG particles are estimated from those of the atoms. Rememberxx~CG¼xx~MD, whereis the coarse graining
factor in one spatial direction. Then characteristic frequency of the CGP can be estimated as!!~CG ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffikKk=kMk
p
where k kdenotes the norm. SincekMk /d andkKk /d2,
where d is the space dimension, so that !!~CG /1.
Therefore the time increment used in the CGP dynamics can easily be estimated as
tt~CG tt~MD/; ð21Þ
where~ttMDis the time increment used in the MD. The time
scale ratio between the atoms and the CGPs is independent of
the spatial dimensiondand scales asin the same way as
the length. This is a very important result in the numerical matching between the two dynamics.
Now we require the following conditions
~xxLB ¼AL~xxCG; ð22Þ
tt~LB¼ATtt~CG; ð23Þ
for the numerical computation, where AL and AT are the
scaling factors of the space and time increment, respective-ly. The larger AL is, the smoother the solid boundary is. In
other words, the coarse graining factor in the CGP must
be chosen so as for xx~CG to be comparable to xx~LB. We
have chosen a value within the range of 0:8AL1. By
eq. (22), the length scalexx~LB in the LBM is fixed by that
of the CG grid distance. The ratioAT is given by
AT ¼
~ttLB
tt~CG
¼ ffiffiffiALxx~CG 3 p
~
c
cstt~MD
¼ ALffiffiffi 3 p vv~CG
~
c cs
ð24Þ
¼ AffiffiffiLxx~MD 3 p
~
c cstt~MD
¼ ALffiffiffi 3 p vv~MD
~
c cs
; ð25Þ
where we usedxx~CG¼~xxMDandvv~MD¼xx~MD=tt~MD.AT
is governed by the ratio of the characteristic velocity of the oscillation of the atom around the equilibrium position to the
sound speed in the fluid. Typical values used in the MD are ~ttMD¼100tAU¼2:41015[s] for the time step width, xx~MD¼1:91010[m] for the argon atom and vv~MD¼ 0:79105[ms1], while for the aircc~
s¼3:3102[ms1],
we obtain the ratio as
AT138AL: ð26Þ
SinceAL¼Oð1Þ, the time scale ratio is about a hundred and
that the CGP dynamics part must be integrated about AT
times per one LBM cycle.
In the fluid domain, the characteristic force in the LBM unit is
FLB¼
0cc~ðxx~LBÞd ~ttLB
¼0cc~2ð~xxLBÞd1
¼n0mLB
ffiffiffi 3 p ~ c cs 2
ð~xxLBÞd1; ð27Þ
where0is the fluid density,n0 the number density of fluid molecule andmLBthe mass of fluid molecule. Then the ratio
ofFLB to the Hartree force unitFCG is given by
BF¼
FLB
FCG
¼n0mLB ffiffiffi 3 p ~ c cs 2
ðxx~LBÞd1
mAU l AU tAU 2 1 lAU
¼n0
mLB
mAU
pffiffiffi3
~ c cs uAU !2 lAU
xx~LB
ð~xxLBÞd: ð28Þ
Typical values for the air are mLB¼4:8511026[kg],
n0¼2:6871019[cmd], so that forAL¼1we have
BF¼0:1963: ð29Þ
The CGP velocity in the atomic unit is transformed to the one in the LB unit by
vLB¼BVvCG; BV¼
uAU ffiffiffi 3 p ~ c cs
ð30Þ
andBV3:85103for the air.
[image:5.595.107.232.665.748.2]5.2 Coupling
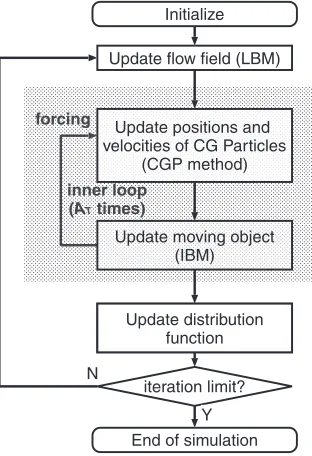
Figure 6 shows the flow chart of the numerical
computa-tion. The CGP process must be iterated AT times for one
LBM cycle. The boundary condition is given by eq. (12) evaluated at thekth CGP positionXk on the solid surface as
fðXkðsÞ;tþtLBÞ
¼ fðXkðsÞ;tÞ 2E
BVcVk
c2
s
; ð31Þ
wheresis a time withint<s<tþtLB andVkis thekth
CGP velocity in the atomic unit. However, since the CGP dynamics is advancedATtimes per one LBM cycle, it is also
necessary to introduce a process of coarse graining of the CGP dynamics in the time domain.
A straightforward way is to assume that the kth CGP on
the surface has the averaged position and velocity
XkðtÞ ¼
1 tLB
ZtþtLB
t
XkðsÞds; ð32Þ
UkðtÞ ¼
1 tLB
ZtþtLB
t
during the integration of the CGPs. However, this leads to the instability of the CGP dynamics because the momentum exchange between the CGPs and the fluid is not conserved at each time step of the CGP dynamics. In other words, this is equivalent to bring the slow variables into the degrees of freedom with the smaller time scale. Rather, the coarse grained variables should appear in the slower variables, the fluid motion, which is done as follows.
At each time step of the CGP dynamics, the distribution
function at the kth CGP position on the surface is
com-puted as
fðXkðsÞ;sÞ ¼X
i;j
ðXkðsÞ;rijÞfðrij;tÞ; ð34Þ
fðXkðsÞ;sþtCGÞ
¼ fðXkðsÞ;sÞ 2E
BVcVkðsÞ
c2
s
ð35Þ
for tstþtLB. Note that the time argument of the
distribution function in the right hand side of eq. (34) is t. It is important also to note that the distribution functions
fðXkðsÞ;sÞ and fðXkðsÞ;sþtCGÞ are those evaluated as
if they were computed at each time step of the LBM cycle. Therefore the change in the distribution function per one CGP cycle is1=AT times the difference, and given by
fðXkðsÞ;sþtCGÞ
¼ 1
AT
fðXkðsÞ;sþtCGÞ fðXkðsÞ;sÞ ð36Þ
and thus the force acting on the kth CG particle on the
surface per one CG cycle is computed as
gCGðXkðsÞ;sþtCGÞ
¼ BF
X
cfðXkðsÞ;sþtCGÞsk: ð37Þ
On the other hand, the reaction to the fluid is given by
gLB¼ gCGðXkðsÞ;sþtCGÞ, so that the corresponding
change in the distribution function at the fluid grid point
rijper one CG cycle becomes
fðrij;sþtCGÞ
¼X
k
fðXk;sþtCGÞDijðrijXkÞsk: ð38Þ
The change in the distribution function per one LBM cycle is given by integrating the above change over the time duration oftLB as
fðrij;tþtLBÞ ¼
ZtþtLB
t
fðrij;sÞds ð39Þ
which is added to fðrij;tþtLBÞas the interaction effects
after the usual LBM process.
The momentum exchange between the fluid and the CGP is done as if the fluid responded to each step of the CGP dynamics. And then the force acting on the fluid is accumulated over the time duration of one LBM cycle. In other words, the dynamics of the fast variables is exactly solved and statistically projected on the slow variables through the time integration of the fast variables. It follows that the above procedure conserves the momentum at the boundary at each time step of the CGP dynamics.
6. Numerical Simulation of Fluid-Solid Interaction
6.1 An elastic rod in 2-dimensional Poiseuille flow
We consider first numerical simulation of an elastic rod in the Poiseuille flow in 2-dimensions. An incompressible viscous fluid flows between two parallel flat plates and the elastic rod composed of the CGPs is fixed on the bottom plate (see Fig. 7). The origin is at the left corner of the bottom plate andx-axis is taken along the bottom plate and
y-axis in the direction perpendicular to the plates. When
uniform pressure gradient in the positive x-direction is
applied to the fluid, the resulting velocity field in the absence of the rod is parallel to the plates and the horizontal
velocity is a quadratic function of y with the maximum
speed on the center line (Poiseuille flow).15)
The number of fluid grid points areL¼600andH¼200
inxandydirections, respectively. The boundary condition of the fluid velocity is v¼ ðvx;vyÞ ¼0 on the plates,
ð4Vmyð1yÞ;0Þ at the inlet, and @vi=@x¼0 for i¼x;y at
the right boundary. On the rod surface vfluid¼Urod is
required. The maximum velocityVmis given byVm¼0:1or
determined from the Reynolds number which is described below. The rod is fixed at 100 units downstream from the
origin, and is composed of NxNy¼1050 CGPs in x
Update distribution function Initialize
Update flow field (LBM)
iteration limit?
End of simulation
inner loop (AT times) forcing
Y N
Update moving object (IBM) Update positions and velocities of CG Particles
(CGP method)
Fig. 6 Flow chart of the numerical computation.
y
x
L
H
Nx
Ny
[image:6.595.90.246.73.301.2] [image:6.595.349.502.653.763.2]andydirections, respectively. Again the CGPs are generated from the argon atoms with the spatial coarse graining ratio ¼1024.
We choose as AL ¼1 and AT ¼100. The Reynolds
numbers is defined by R¼VmNy=, which is a
nondimen-sional flow parameter representing the ratio of the convection to the viscous effect, and chosen asR¼25and 250. For the
present level of coarse graining ¼1024, typical values
with dimensions are Ly¼Ny~xxLB ¼17[mm] and air¼ 1:5105[m2s1], so thatR¼25impliesVm¼22[ms1]
which is unrealistically large. Instead, if we chooseVmmuch
smaller value, then the degree of the coarse graining must be increased unrealistically. The above choice of the Reynolds number is very hard for the numerical computation, but here our purpose is to examine whether our computational scheme works even in such tough condition. For more realistic range of parameters, we describes it later on.
The time variation of the x component of the
displace-ment of the CGP at the top left corner of the rod is shown
for R¼25 and R¼250 in Fig. 8, in which the
displace-mentxis in the grid unit and the time is normalized in terms of the wash out time L=Vm as t¼ ðVm=LÞNLBt tLB, where
NLBt is the number of time steps in the LBM. For R¼25, the variation decays in time, but the oscillation period is almost constant and about 0.45 (81 [ns]) which is very close to the period of 0.50 (90 [ns]) for the eigen mode of the rod alone as we have seen in Sec. 2. This means
that in the initial phase the rod undergoes the impact from the fluid motion and oscillates nearly with its eigen frequency and the motion decays at latter time due to the fluid drag, so that the flow becomes steady and thus the interaction is static at large time. On the other hand, when
R¼250, the motion of the rod does not decay in time and oscillates chaotically although the eigen mode remains predominant. The interaction between the fluid and solid is strong and unpredictable.
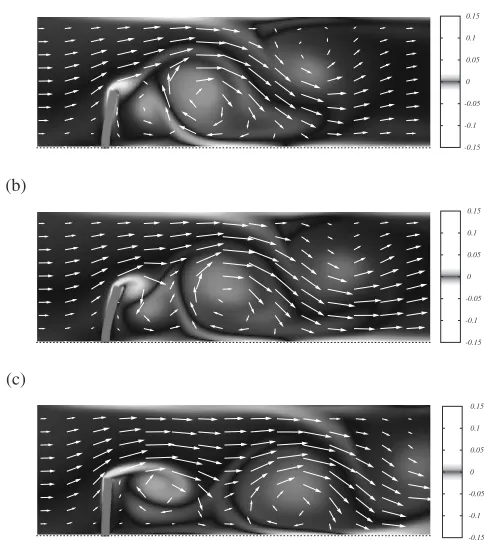
Figure 9 shows the velocity vector and vorticity
distribu-tion for R¼250 at the nondimensional time t¼0:83;
1:00;1:25, respectively. At t¼1:00 a strong negative vorticity is generated near the top left corner of the rod
which is bent due to the fluid motion, and at t¼1:08 the
eddy is about to be shed into the fluid while the bending of the rod becomes almost maximum. When the eddy is separated and convected downstream, the rod returns to be straight, and similar motion continues. Correspondingly, when the bending of the rod becomes maximum the stretch (compression) of the lower left (right) corner of the rod iny
direction becomes maximum (figures not shown).
6.2 Flow induced by a collective motion of an array of elastic rods
We now consider more realistic problem of fluid transfer by a kind of MEMS (NEMS) (Micro(Nano)-Electro-Mechanical System) device. It has been known that an elastic surface wave (Rayleigh wave) can convey a body in a direction opposite to the traveling wave. It is very interesting and useful for the future development of micro(or nano) scale fluid devices to examine whether the fluid can be transferred by using similar technique.
(a)
(b)
Fig. 8 Variation of thexcomponent of the displacement of the CGP at top left corner of the plate.R¼25(a) and 250 (b). The displacementxis in the grid unit and the time is normalized in terms of the wash out timeL=Vmas t¼ ðVm=LÞNLBt tLB.
-0.15 -0.1 -0.05 0 0.05 0.1 0.15
(a)
-0.15 -0.1 -0.05 0 0.05 0.1 0.15
(b)
-0.15 -0.1 -0.05
0 0.05 0.1 0.15
(c)
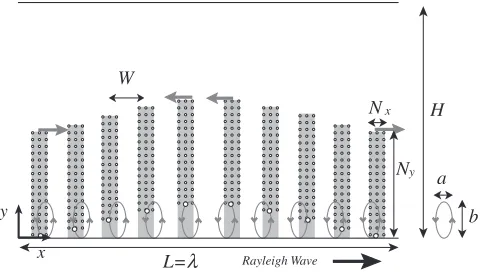
[image:7.595.77.261.70.387.2] [image:7.595.304.546.83.353.2]Consider an array of elastic rods which are fixed on the horizontal plate above which an incompressible fluid fills the space. We assume that the Rayleigh wave is traveling on the surface in the positive xdirection and the array of the elastic rods undergoes a collective motion in response to the Rayleigh wave (see Fig. 10). With this set up we consider how the fluid motion is induced and how much amount of the fluid is transferred. The number of the fluid grids is 500 (Case A) or 1000 (Case B) in the horizontal direction and 100 in the vertical direction, respectively, and the boundary conditions for the fluid is the periodic condition at x¼0 and L, while v¼Urods on the rods, and the slip condition
(the tangential viscous stress is zero) is applied aty¼Hin order to mimic the free surface of the fluid. Each rod is the same as that used in the previous section, and 10 rods are
placed with separation distance W ¼50xLB for Case A
and W ¼100xLB for Case B. In order to examine the
effect of the microscopic elastic matrix of the rod on the
fluid-solid interaction, we have changed C of eq. (1) by
multiplying a factor ¼1:0;0:5;0:2for which computation is referred to as Run I, Run II, and Run III. This change leads to the variation of the macro scopic stiffness of the rod and the characteristic magnitude is, for example,CCG
11
21;10:5;4:2[GPa]. The ratios AL and AT are 1 and 100,
respectively.
We assume that instead of solving the equation of the Rayleigh wave the motion of the horizontal plate due to the Rayleigh wave propagation is kinematically described as
x¼x
a
2sinðkx!tÞ; y¼
b
2cosðkx!tÞ; ð40Þ
for the position vector ðx; yÞof the surface element of the
horizontal plate, wherekand!are the wavenumber and the
angular frequency of the Rayleigh wave. The amplitudesa
and b are linearly dependent each other and fixed by the
Poisson ratio of the bottom plate, but here we take the ratio
a=b to be an arbitrary parameter. The wavelength of the
Rayleigh wave is assumed to be500xLB(¼100[mm]) and
its amplitude is a¼0:5xLB (¼100[nm]) and b¼xLB
(¼200[nm]) in x and y directions, respectively. The
frequency ff~of the Rayleigh wave is chosen to be 1 [MHz] so that the typical velocity of the oscillation of a point
on the horizontal bottom plate is about URay¼!Raya
(0:6[ms1]). The Reynolds number is chosen to be
R¼URayNy=¼0:15 with Ny¼50 which is the height
[image:8.595.49.290.73.209.2]of the rod.
Figure 11 shows the velocity and vorticity distributions at the nondimensional time tt~ff~¼32:3 for the Runs I and III withW¼50xLB (Case A), whereTT~¼1=ff~is the time for
the Rayleigh wave to travel the fundamental domainL. The vorticity concentrates near the tops of the rods. It is also found that the spatial coherency of the vorticity distribution for Run III prevails over the region wider than that for Run I. Figure 12 compares the evolution of the time accumulated total volume flux (in the LBM unit) defined byQðxÞ ¼R0tR0Hvxðx;y;sÞdydsatx¼0for the Cases A and
B. The curve for ‘‘Rigid’’ is the results of the rigid rod in which the grid spacing of the CGP is fixed. The average horizontal velocity in the dimensional form is given by
~
V V V
V ccQ~ =ðHtÞand found to be about 9 [mms1] for Run III
of Case A and about 7 [mms1] for Run III of Case B,
respectively. It follows that general trend is (1) the fluid is transferred in the opposite direction to the Rayleigh wave, (2) the fluid transfer is enhanced by softer (smaller stiffness) and thicker rods, which resembles the flagellum.
Instead of using the elastic rod array, we have also studied the case of a continuous layer of the CGPs over the horizontal plate and the Rayleigh wave travels within the layer. The thicker the layer of the CGPs becomes, the more the fluid is transferred in the opposite direction to the Rayleigh wave, although the time accumulated total volume fluxQis smaller than in the case of the rod array. The average horizontal velocity is about 3 [mms1] for the case of layer of 10 CGPs. Therefore it is suggested that in order to transfer the fluid by using the Rayleigh wave a flagella like structure is more effective.
7. Summary and Conclusions
We have studied the interaction between the fluid and the elastic body from the mesoscopic view point for the fluid and the microscopic view point for the solid. The CGP system was constructed from the atoms by using the RCGP method under the assumption of the local thermal equi-librium and the phonon approximation, and the system was integrated in the same way as in the MD but with different time step width. As for the fluid motion the LBM method was used. In the LBM, the distribution function of the ensemble of fluid particles is introduced and evolved according to the shift and collision processes, thus the approach is mesoscopic. Any specific character of the fluid molecules and of the length and time scales do not enter the LBM dynamics, and the fluid motion emerges as collective motion in the long wavelength limit.
Both dynamics are coupled through the momentum exchange on the surface of the solid body, where the length and time scales in the LBM are fixed. The important point is that the coarse graining process should be made not only in constructing the CGP system but also in this momentum exchange process where two physical processes with widely different spatial and time scales meet at the small spatial domain. The coarse grained quantities obtained by the statistical averaging of the fast variables should appear only in the dynamics of the slow variables.
Rayleigh Wave
x y
W
N x H
Ny a
b
L=
Our method was applied to the cases of single or multiple elastic rods which are composed of the CGPs in the two dimensional Poiseuille flow. It was found that the method was successful and useful to describe the interaction between
fluid and solid with scale disparity. The results presented in this study are, however, qualitative rather than quantitative because our computation was limited to 2-dimensions and some parameters were not those of the actual system. Further quantitative verification is necessary for the future development, which includes quantitative comparison of the oscillation period, of the solid body, drag and lift acting on it, and so on, and 3-dimensional computation is very important. These are challenges to the computation for the multiscale physics, and the work is in progress and will be reported somewhere.
Acknowledgments
The authors thank the Information Technology Center of Nagoya University for his providing computational support.
REFERENCES
1) C. M. Ho and Y. C. Tai: Ann. Rev. Fluid Mech.30(1998) 579. 2) R. E. Rudd and J. Q. Broughton: Phys. Rev. B58(1998) 5893. 3) R. E. Rudd and J. Q. Broughton: Phys. Rev. B72(2005) No. 144104. 4) S. Ogata, E. Lidorikis, F. Shimojo, A. Nakano, P. Vashishta and R. K.
Kalia: Comput. Phys. Commun.138(2001) 143.
5) S. Ogata, F. Shimojo, R. K. Kalia, A. Nakano and P. Vashishta: Comput. Phys. Commun.149(2002) 30.
6) R. Kobayashi, S. Ogata, Y. Inoue, J. Tanaka and T. Gotoh: Proc. APCOM07 in conjunction with EPMESC XI, MS9-1-3. December 3–6, 2007, Kyoto, JAPAN.
7) R. Kobayashi, T. Nakamura and S. Ogata: Mater. Trans.49(2008) doi: 10.2320/matertrans.MB200813.
8) S. Chen and G. D. Doolen: Ann. Rev. Fluid Mech.30(1998) 329. 9) S. Succi:The Lattice Boltzmann Equation for Fluid Dynamics and
Beyond, (Oxford University Press, 2001).
10) P. Bhatnagar, E. Gross and M. Krook: Phys. Rev.94(1954) 511. 11) C. S. Peskin: J. Compu. Phys.25(1977) 220.
12) Z. G. Feng and E. E. Michaelides: J. Compu. Phys.195(2004) 602. 13) X. D. Niu, C. Shu, Y. T. Chew and Y. Peng: Phys. Lett. A354(2006)
173.
14) S. C. R. Dennis and J. G. Z. Chang: J. Fluid Mech.42(1970) 471. 15) G. K. Batchelor:An introduction to Fluid Dynamics, (Cambridge Univ.
Press, 1967).
(a)
(b)
−150 −100 −50 0
0 2 4 6 8 10
V
olume Flux,
Q
x=0
Timesteps, t/104 Rigid
Run I Run II Run III
−150 −100 −50 0
0 2 4 6 8 10
Volume Flux,
Q
x=0
Timesteps, t/10 Rigid
Run I Run II Run III
[image:9.595.97.498.83.269.2]4
Fig. 12 Comparison of the time accumulated total volume fluxQx¼0 at
x¼0 for three values of the stiffness, Runs I, II, and III Case A: W¼50xLB(a) and Case B:W¼100xLB(b).
(a)
(b)
-0.0006 -0.0004 -0.0002
0 0.0002 0.0004 0.0006
-0.0006 -0.0004 -0.0002
[image:9.595.52.291.318.665.2]0 0.0002 0.0004 0.0006