2017 International Conference on Computer, Electronics and Communication Engineering (CECE 2017) ISBN: 978-1-60595-476-9
A Direct Learning Digital Predistortion Algorithm to Accurately
Compensate for the Power Amplifier Nonlinearity
Zheng-jie LI
1, Qiang XU
2and Wan-zhi MA
2,*1Southwest China Research Institute of Electronic Equipment, No. 496 Ying Kang
West Road, Chengdu, 611731, China
2University of Electronic Science and Technology of China, No. 2006,
Xiyuan Ave., Chengdu 611731, China *Corresponding author
Keywords: Power amplifier, Direct learning, Digital predistortion, NMSE, ALCR.
Abstract. The conventional digital predistortion (DPD) algorithm based on model identification involves approximations, which introduce an ineligible calculation error, and hence cause performance degradation. In this paper, we present a novel direct learning predistortion algorithm which identifies the power amplifier (PA) model using the least square (LS) algorithm and accurately calculates the predistortion function by a new method. The method constructs a univariate polynomial and finds its roots to obtain the accurate value of the DPD function. Although the proposed algorithm will require additional calculations, it can compensate the PA nonlinearity more precisely. Simulation results demonstrate that the new algorithm outperforms the conventional algorithm in both the adjacent channel leakage ratio (ACLR) and normalized mean square error (NMSE) performance.
Introduction
The power amplifier (PA) is a key component of base station in the wireless communication systems, however, it can also bring system nonlinearity because of the limits of the electronic components. The system nonlinearity will lead to spectral regrowth, that is, spectral broadening, and hence adjacent channel interference, which would degrade the transmission performance. To solve problem, a variety of solutions have been proposed in [1]–[3], in which digital predistortion (DPD) is the most promising one. With the assistance of the DPD algorithm, the PA could work near the saturation point while maintain linearity thus obtain high efficiency.
Generally, the DPD structure could be categorized into two separate classes, that is, the indirect learning structure and the direct learning structure. Eun and Powers [4] proposed an indirect learning structure for DPD. In this structure, the output signal is used as the input of a postdistorter (after the PA) to extract the parameters of a predistorter (before the PA). However, there are two drawbacks in this structure [5]. First, the measurement of the output signal will be corrupted by channel noise, making the adaptive algorithm converge to biased values. Second, theoretically speaking, the predistorter and the postdistorter cannot be permuted because of the PA nonlinearity.
Kim and Konstantinou [6] proposed a direct learning structure based on the identification of the PA model, whose reverse function is the DPD function to be calculated. This algorithm models the PA as a memory polynomial with only odd terms, and then calculates the reverse function of the memory polynomial by means of a recursive algorithm. However, the recursive algorithm requires some approximations that bring in extra calculation error and thus degrades the overall system performance.
[6] and [7] to calculate the output of DPD function. Finally, we used a long term evolution (LTE)-advanced signal to validate our algorithm through MATLAB simulations. The simulation results reveal that the new algorithm can reduce the spectral regrowth more effectively and outperforms the conventional algorithm in both the normalized mean square error (NMSE) and adjacent channel leakage ratio (ACLR) performance.
Systematic Scheme
The direct learning DPD structure based on mode identification is shown in Figure 1, where all signals are presented in their discrete baseband form. Signal u n( ) is the input of the DPD function
( )
g ⋅ , whose output x n( ) is fed into the PA f( )⋅ at time n. The feedback path produces y n( ), which is
down converted, filtered and normalized from the output of the PA. x n( ) and y n( ) are analyzed to extract the characteristics of the PA, which will be used to derive the DPD function.
PA
( )
u n x n( )
( )
y n
( )
g
( )
f
( )
f
Digital Predistorter
Calculating DPD Function
DAC
ADC PA model
Identification
Figure 1. System model.
Derivation of the Algorithm
PA Model Identification
By relating the input and output signals, PA modeling provides a computationally efficient method to analyze a communication system without resorting to any physical PA device [8], [9]. In recent years, the Volterra series has been successfully applied to PA modeling, because it can accurately model both the nonlinearity and memory effect. However, when it comes to implementation, the Volterra series model is limited to low-order nonlinearity due to its high computational complexity. Therefore, many simplified models have been developed, such as memory polynomial (MP) model [1], [3], generalized memory polynomial (GMP) model [10], radial pruning Volterra (RPV) model [11] and simplified radial pruning Volterra (SRPV) model [11]. Among these models, MP model with even-order terms is quite promising and has been widely used for its simplicity and effectiveness [6]–[11]. To simplify the reverse solving process in our algorithm, the MP model is used here, which can be described as [11]
1 1
0 0 even
( ) K L ( ) | ( ) | , (k 3)
kl
k l
k
y n w x n l x n l K
(1) where K is the order of nonlinearity and L is the depth of memory effects.
Consideringx n k l( , , )=x n( -l x n) | ( -l) |k-1, (1) can be rewritten as
( ) T n
y n W X (2)
Where [ ( ,0,0), , ( , , ), , ( , 1, 1)]T n x n x n k l x n K L
X .
T
Y W X (3) where Y=[ (0), (1), (2), , (y y y y N -1)]Tand
0, 1, 2 1 [ , , N ]T
X X X X
X .
The solution to (3), that is, the parameter estimation, can be derived by applying the least square (LS) algorithm as [12]
1 ˆ ( H ) H
LS
W X X X Y (4)
in which, XH denotes the complex conjugate transpose of X . Derivation of the DPD Function
Unlike the others, our algorithm is simply based on deriving the solution to the reverse function of PA model f( ) and hence yielding the output of the DPD function for the PA model precisely. The characteristic parameters of the PA model ˆLS [ , ,0 1 2, , L]T
K
w w w w
W can be estimated by the LS algorithm mentioned earlier, and the PA is model by using memory polynomials as
1 1 1
0 0 0
even
( ) K L ( ) | ( ) |k L (| ( ) |) ( )
kl l
k l l
k
y n w x n l x n l x n l x n l
(5) where 1 0 even(| ( )|) ( ) K | ( ) |k ( 1)
l kl
k k
x n l x
x n l x n l w n
(6) Furthermore, from (5), x(n) can be expressed in terms of signal y n( ) ,
[ (x n 1), (x n 2, , (x n L 1)]T
= - - - +
V and | ( ) |x n as
1
0 ( ) ( ) ( ) ˆ ( ) ( ), , ( ) , ( ) L l l LS
y n x n l x n l x n g y n x n
x n
W V
(7) With the predistortion of an ideal DPD, the output of PA y n( ) is equal to the input of DPD u n( ) [6]. Therefore the output of DPD function can be described as
1 0 ( ) ( ) ( ) ( ) ( ) L l lu n x n l x n l x n x n
(8) Equation (8) reveals that x n( ) is a function of | ( ) |x n , u n( ) and x n( -l), given that the approximation of the PA characteristics WˆLS has already been estimated by the LS algorithm. However, the value of | ( ) |x n is unknown before x n( ) has been calculated. In this paper, a new algorithm is proposed which can calculate | ( ) |x n precisely to obtain an accurate solution to the reverse function.Taking the module of both sides in (8), we have
1 0 ( ) (| ( ) | ( ( ) | ( | ( ) | ) | ) L l l
1 1
0 0 0
1 even
1 1
0 0
1 1
even even
2 2
1 1
0 0
1 1
even even
) ( | ( ) | | ( ) | ) ( ) | ( | ( ) | (| ( ) | | ) ( ) | | | | ( ) K k k k k k k K K k k k k k k k k K K k k k k k k k k
a x n jb x n
a x n j b x n
a x n x n
x n b
(10) where ak0and bk0 are the real part and the imaginary part of wk0 respectively. Substituting this expanded denominator back in (9), a function of | ( ) |x n 2 can be derived as2 2 4 2 2
[image:4.612.94.368.67.221.2]0 1 2
(| ( ) | ) | ( ) | | ( ) | | ( ) | k | ( ) | K
k K
x n C C x n C x n C x n C x n
(11)
Where C0 v n( )2 ,
1 1
0 ( )0 0 ( )0
1 1
k k
k i k i i k i
i i
C a a b b
, and K ³3 . Replacing | ( ) |x n 2 by acommon variable z, we can obtain a general univariate polynomial of high degree as
2
0 1 2
( ) K,( 3)
K
z C C z C z C z K
(12) where | ( ) |x n 2 is the positive real root of this polynomial, which can be simply found by a Matlab
command roots( ). After finding the correct real root, | ( ) |x n is simply calculated by using a square
roots function sqrt( ). Finally, x n( ) can be accurately calculated by substituting | ( ) |x n back in (8).
Numerical and Simulation Results
In this section, we give some numerical simulation results to evaluate the performance of our DPD algorithm. In the simulations, a memory polynomial is used to represent the real PA [8], with nonlinearity order K =5 and memory depth L=3. The source we use is a LTE-advanced signal with 5 component carriers and a total bandwidth of 100MHz.
0 100 200 300 400 500 600 700 800 900 1000 Method in [6]
10-15 10-12 10-9 10-6 10-3 100 Samples Proposed method
Figure 2. Introduced calculation error by different methods, where the PA is modeled by a MP model with K = 5 and L = 3.
Simulations are carried out to make a comparison of the introduced calculation error by different methods. As indicated in Figure 2, the calculation error in amplitude introduced by our algorithm is about 1 10´ -13, which is significantly smaller than algorithms in [6] and [7]. And our algorithm can
Figure 3. Relationships between NMSE of different methods and behavior modeling error, where the PA is modeled by a MP model.
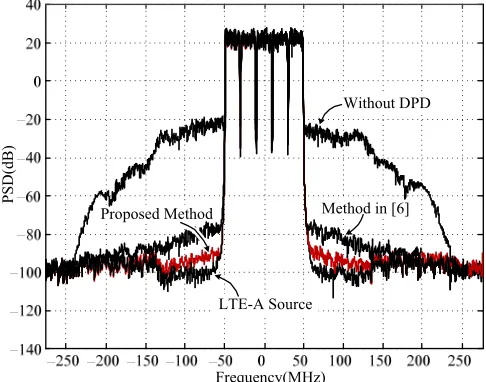
Simulations were also carried out to calculate the adjacent channel leakage ratio (ACLR), which indicates the nonlinear distortion of a PA. The ALCR of the PA with our new DPD algorithm was calculated and compared with the conventional direct learning algorithm [6]. It turns out that our DPD algorithm offers about 38dB reduction in ACLR performance which is 5.8dB better than algorithm in [6] at least. As shown in Figure 4, there is a significant reduction in spectral regrowth with our DPD algorithm, which can compensate for the nonlinearity of the PA more effectively.
Without DPD
LTE-A Source
Proposed Method Method in [6]
PSD
(dB)
Frequency(MHz)
Figure 4. Effectiveness of different predistortions in suppressing spectral regrowth, where the PA is modeled by a MP model with K = 5 and L = 3.
Summary
In this paper, we directly calculate the output of the DPD function accurately by constructing a univariate polynomial of high degree and finding its real roots, instead of trying to find an approximate output of the DPD function when calculating the reverse function of the PA model [6], [7], Although the proposed algorithm requires additional calculations, it can compensate for the nonlinearity of the PA more precisely, because it only brings in a relatively low calculation error compared with the PA modeling error. Simulation results demonstrate that the algorithm proposed in this paper can alleviate the PA nonlinearity more effectively and thus outperform the conventional algorithm in both the NMSE and ACLR performance.
Acknowledgement
[image:5.612.185.428.296.487.2]References
[1] L. Ding, G.T. Zhou, D. R. Morgan, Z. Ma, J.S. Kenney, J. Kim, and C.R. Giardina, A robust digital baseband predistorter constructed using memory polynomials, IEEE Trans. Commun. (2004) 159-165.
[2] P. Henna and M. Aarne, Comparison of direct learning and indirect learning predistortion architectures, 5th IEEE Intl. Symposium on Wireless Communication Systems (2008) 309-313. [3] L. Ding, Digital Predistortion of Power Amplifiers for Wireless Applications, a Thesis presented to the Academic Faculty, Mar. 2005.
[4] C. Eun and E.J. Powers, A new Volterra predistorter based on the indirect learning architecture,” IEEE Trans. Signal Process. (1997) 223-227.
[5] D. Zhou and V.E. DeBrunner, Novel adaptive nonlinear predistorters based on the direct learning algorithm, IEEE Trans. Signal Process. (2007) 120-133.
[6] J. Kim and K. Konstantinou, Digital predistortion of wideband signals based on power amplifier model with memory, Electron. Lett. (2001) 1417-1418.
[7] P. Varahram, S. Mohammady, M.N. Hamidon, R.M. Sidek and S. Khatun, Complex gain predistortion in WCDMA power amplifiers with memory effects, The International Arab Journal of Information Technology, (2010) 333-341.
[8] J.C. Pedro, S.A. Maas, A comparative overview of microwave and wireless power-amplifier behavioral modeling approaches, IEEE Trans. Microw. Theory Tech. (2005) 1150–1163.
[9] H. Ku and J.S. Kenney, Behavioral modeling of nonlinear RF power amplifiers considering memory effects, IEEE Trans. Microw. Theory Tech. (2003) 2495–2504.
[10] D. Morgan, Z. Ma, J. Kim, M. Zierdt, and J. Pastalan, Generalized memory polynomial model for digital predistortion of RF power amplifiers, IEEE Trans. Signal Process. (2006) 3852–3860. [11] C. Crespo-Cadenas, J. Reina-Tosina, M.J. Madero-Ayora, and J. Muñoz-Cruzado, A new approach to pruning Volterra models for power amplifiers, IEEE Trans. Signal Process. (2010) 2113–2120.