Copyright © 2013 IJECCE, All right reserved 1527
International Journal of Electronics Communication and Computer Engineering Volume 4, Issue 5, ISSN (Online): 2249–071X, ISSN (Print): 2278–4209
Reconfigurable Design of Adaptive Radius Sphere
Decoding for MIMO Systems
Abha Chauhan
ME Student, NITTTR Chandigarh, UT, India Email: [email protected]
Rajesh Mehra
Associate Professor, ECE Department, NITTTR Chandigarh, UT, India
Abstract – Multiple Input-Multiple Output (MIMO) systems uses multiple antennas at the transmitter and the receiver to achieve high spectral efficiency. Sphere decoder (SD) has been widely used as the decoding algorithm in MIMO systems which achieve near Maximum Likelihood (ML) performance with reduced complexity. The complexity of SD increases considerably with increase in system configuration or modulation order. In this paper an efficient early pruning technique has been proposed which eliminates the nodes that are unlikely to contribute to near ML solution which results in reduced complexity. The simulation shows a reduction of 41 % of complexity at 18 dB SNR. The proposed algorithm for uncoded 4X4 MIMO system with 16-QAM modulation is synthesized using Xilinx Virtex 5 XC5VLX50T FPGA. The FPGA resource utilization and timing summary shows a considerable improvement with the existing one.
Keywords – Sphere Decoder, Maximum Likelihood Detector, Multiple-Input Multiple-Output, Schnorr-Euchner Algorithm, Early Termination, Field Programmable Gate Array, Bit Error Rate.
I. I
NTRODUCTIONMIMO is one of the emerging technologies for all wireless communication because it can increase the capacity (coverage or link quality in other sense) at no cost in frequency spectrum [1].
ML decoder is an optimum decoder for MIMO systems but it has an exponential complexity making it difficult to implement for higher order systems. An alternative decoder that obtains near ML performance with reduced complexity is a Sphere Decoder (SD). While the SDA approach provides the ML solution, the run time (operations required) is highly dependent on the received signal-to-noise ratio (SNR), which results in variable throughput as reported in several implementations of the sphere decoder. These approaches can be effectively expressed as tree-searching class of algorithms while only visiting a subset of the tree [2]. The SDAs for MIMO system have two types of searching strategies: the Fincke-Phost (FP) method and the Schnorr-Euchner (SE) strategy. The second method has less computational complexity by re-ordering the constellation searching at each layer [3].
There are two main challenges in designing and implementing a SD based MIMO detection system firstly it is highly complex at low SNR regions and secondly the complexity varies with the configuration of antennas used and constellation size [4]. A statistical threshold-based improved SD algorithm is proposed to prune the inferior paths within the algorithm search region, reducing much computational cost without much affecting the final performance [5].
There has been enough research in the design of transmission and reception algorithms of the MIMO systems but the complexity of the implementation is still a topic of interest. The MIMO standards have changed immensely and thus the prototyping of these algorithms have gained a lot of attention. An FPGA is reconfigurable, that is, their internal structure is only partially fixed at fabrication, leaving the wiring of the internal logic to the application designer for the intended task thus it has become very popular hardware platform for design, prototyping and validation of these algorithms is Field Programmable Gate Arrays (FPGA). Theoretical performance analysis and simulations of a system confirm predictions under idealistic conditions, but to validate the performance in a practical environment, a testbed is essential as many imperfections of the real world are neglected in simulations [6].
In this paper, an early termination (ET) technique which adaptively changes the radius of search with the SNR and prunes the nodes those are unlikely to become ML solution when the tree searching reaches the final layer is proposed. The simulation results demonstrate that an ET-SD can achieve similar or better in some cases as the SE-SD with reduced complexity. Implementation is done on an FPGA platform, to further analyze the performance of the proposed decoder in terms of area utilized and the speed at which the design can run.
The rest of the paper is organized as follows: Section II reviews the SD for MIMO system, Section III introduces an Adaptive Radius SD and discusses how to derive the threshold. The Matlab based simulations followed by hardware implementation in Section IV and V respectively. Finally conclusions are drawn in Section VI.
II. MIMO S
YSTEMSIn a MIMO system with M transmit antennas and N receive antennas, the M-dimensional transmit signal vector s suffers multipath distortion and noise corruption v when propagating across the channel to the receiver. Hence, N-element received signal vector is given by:
= + (1)
Where s=[s1,s2,……sM]T is the transmitted symbol
vector in which each component is independently drawn from a complex constellation of the modulation scheme, y=[y1,y2,…..yN]T is the received symbol vector, and
Copyright © 2013 IJECCE, All right reserved Fig.1. Linear representation of MIMO System
There are various MIMO receive algorithms. Some of them are listed below:
1) Zero Forcing (ZF) Decoder:
This is one of the simplest algorithms available. It works as a standard equalizer where the inverse of the channel frequency response is applied to the received signal but is not suitable for high noise conditions.2) Minimum Mean Squared Error (MMSE) Detector:
The MMSE detector minimizes the overall error due to the noise and mutual interference between the signals from the different transmit antennas. Compare with ZF, the MMSE detector is less sensitive to noise at the cost of reduced signal separation quality. Although, it does not fully eliminate ISI like the ZF algorithm; it substantially reduces the total noise power experienced at the receiver.3) Ordered Successive Interference Cancellation
(OSIC) decoder:
The major impairment in MIMO systems is Co-Antenna Interference. This impairment is readily avoided using the OSIC algorithm. This algorithm recursively detects the incoming sub-streams i.e. layers. It would initially detect the strongest layer; i.e. sub-stream with the highest SNR, and then subtracts it from the original received signal to properly eliminate the Co-Antenna interference.4) Sphere decoder (SD):
it reduces the complexity ofthe MLD while still providing ML performance. The Sphere Decoding algorithm searches the closest lattice point to the received signal within a chosen sphere radius, where each codeword would be represented by a lattice point within a lattice field.
Sphere Decoding (SD) Algorithm:
The maximum likelihood (ML) lattice decoding algorithm tries to find the closest point to the received vector in the lattice structure. Schnorr-Euchner sphere decoding algorithm is a ML lattice decoding algorithms, which tries to enumerate the lattice points inside a sphere, and find the best lattice point with minimum distance to the received point. This decoding algorithm spreads out from a nearby lattice point of the received point and terminates, once the total distance is greater than the best distance and the search procedure reaches the bottom layer.The conventional SD approach to the problem of approaching the estimate is to find a candidate that minimizes the squared Euclidean distance (ED) within a
hypersphere of radius dr2around the received signal y [7]. The figure 2 shows the geometrical representation of the sphere decoder algorithm.
Fig.2. Geometrical representation of SD
The sphere decoder is a derivative of Maximum Likelihood detector.
(2)
Where Ω denotes the set containing all possible modulation points. After structuring the channel with QR decomposition equation (2) can be rewritten as:
(3)
H=QR where Q is a unitary orthogonal matrix and R is an upper triangular matrix whose diagonal possesses real valued positive entries. Equation (3) can be represented by a tree structure with m levels and each node in the tree containsΩchild nodes. The level m represents the highest level of the tree, the m-1 represent the next highest and so on. Thus, the ML solution can be achieved by finding the path with the smallest path metric in the tree construction. A tree search representation is shown in figure 3.
Fig.3. Tree representation of Sphere decoding system A SD instead of visiting the complete node visits only the subset of the tree which reduces the complexity of the algorithm. The search starts from the root down to the 1st level (leaf node), where at the nth level, and all possible (n−1) entries are found so that the symbol lies in the sphere. When the search reaches the leaf node, all the entries of the symbol are discovered. Therefore, each path through the tree corresponds to a possible symbol. As a result, SD can be viewed as a pruning algorithm on this tree from which, based on violation of the constraint given by D, a branch can be removed at any level.
Copyright © 2013 IJECCE, All right reserved Fig.1. Linear representation of MIMO System
There are various MIMO receive algorithms. Some of them are listed below:
1) Zero Forcing (ZF) Decoder:
This is one of the simplest algorithms available. It works as a standard equalizer where the inverse of the channel frequency response is applied to the received signal but is not suitable for high noise conditions.2) Minimum Mean Squared Error (MMSE) Detector:
The MMSE detector minimizes the overall error due to the noise and mutual interference between the signals from the different transmit antennas. Compare with ZF, the MMSE detector is less sensitive to noise at the cost of reduced signal separation quality. Although, it does not fully eliminate ISI like the ZF algorithm; it substantially reduces the total noise power experienced at the receiver.3) Ordered Successive Interference Cancellation
(OSIC) decoder:
The major impairment in MIMO systems is Co-Antenna Interference. This impairment is readily avoided using the OSIC algorithm. This algorithm recursively detects the incoming sub-streams i.e. layers. It would initially detect the strongest layer; i.e. sub-stream with the highest SNR, and then subtracts it from the original received signal to properly eliminate the Co-Antenna interference.4) Sphere decoder (SD):
it reduces the complexity ofthe MLD while still providing ML performance. The Sphere Decoding algorithm searches the closest lattice point to the received signal within a chosen sphere radius, where each codeword would be represented by a lattice point within a lattice field.
Sphere Decoding (SD) Algorithm:
The maximum likelihood (ML) lattice decoding algorithm tries to find the closest point to the received vector in the lattice structure. Schnorr-Euchner sphere decoding algorithm is a ML lattice decoding algorithms, which tries to enumerate the lattice points inside a sphere, and find the best lattice point with minimum distance to the received point. This decoding algorithm spreads out from a nearby lattice point of the received point and terminates, once the total distance is greater than the best distance and the search procedure reaches the bottom layer.The conventional SD approach to the problem of approaching the estimate is to find a candidate that minimizes the squared Euclidean distance (ED) within a
hypersphere of radius dr2around the received signal y [7]. The figure 2 shows the geometrical representation of the sphere decoder algorithm.
Fig.2. Geometrical representation of SD
The sphere decoder is a derivative of Maximum Likelihood detector.
(2)
Where Ω denotes the set containing all possible modulation points. After structuring the channel with QR decomposition equation (2) can be rewritten as:
(3)
H=QR where Q is a unitary orthogonal matrix and R is an upper triangular matrix whose diagonal possesses real valued positive entries. Equation (3) can be represented by a tree structure with m levels and each node in the tree containsΩchild nodes. The level m represents the highest level of the tree, the m-1 represent the next highest and so on. Thus, the ML solution can be achieved by finding the path with the smallest path metric in the tree construction. A tree search representation is shown in figure 3.
Fig.3. Tree representation of Sphere decoding system A SD instead of visiting the complete node visits only the subset of the tree which reduces the complexity of the algorithm. The search starts from the root down to the 1st level (leaf node), where at the nth level, and all possible (n−1) entries are found so that the symbol lies in the sphere. When the search reaches the leaf node, all the entries of the symbol are discovered. Therefore, each path through the tree corresponds to a possible symbol. As a result, SD can be viewed as a pruning algorithm on this tree from which, based on violation of the constraint given by D, a branch can be removed at any level.
Copyright © 2013 IJECCE, All right reserved Fig.1. Linear representation of MIMO System
There are various MIMO receive algorithms. Some of them are listed below:
1) Zero Forcing (ZF) Decoder:
This is one of the simplest algorithms available. It works as a standard equalizer where the inverse of the channel frequency response is applied to the received signal but is not suitable for high noise conditions.2) Minimum Mean Squared Error (MMSE) Detector:
The MMSE detector minimizes the overall error due to the noise and mutual interference between the signals from the different transmit antennas. Compare with ZF, the MMSE detector is less sensitive to noise at the cost of reduced signal separation quality. Although, it does not fully eliminate ISI like the ZF algorithm; it substantially reduces the total noise power experienced at the receiver.3) Ordered Successive Interference Cancellation
(OSIC) decoder:
The major impairment in MIMO systems is Co-Antenna Interference. This impairment is readily avoided using the OSIC algorithm. This algorithm recursively detects the incoming sub-streams i.e. layers. It would initially detect the strongest layer; i.e. sub-stream with the highest SNR, and then subtracts it from the original received signal to properly eliminate the Co-Antenna interference.4) Sphere decoder (SD):
it reduces the complexity ofthe MLD while still providing ML performance. The Sphere Decoding algorithm searches the closest lattice point to the received signal within a chosen sphere radius, where each codeword would be represented by a lattice point within a lattice field.
Sphere Decoding (SD) Algorithm:
The maximum likelihood (ML) lattice decoding algorithm tries to find the closest point to the received vector in the lattice structure. Schnorr-Euchner sphere decoding algorithm is a ML lattice decoding algorithms, which tries to enumerate the lattice points inside a sphere, and find the best lattice point with minimum distance to the received point. This decoding algorithm spreads out from a nearby lattice point of the received point and terminates, once the total distance is greater than the best distance and the search procedure reaches the bottom layer.The conventional SD approach to the problem of approaching the estimate is to find a candidate that minimizes the squared Euclidean distance (ED) within a
hypersphere of radius dr2around the received signal y [7]. The figure 2 shows the geometrical representation of the sphere decoder algorithm.
Fig.2. Geometrical representation of SD
The sphere decoder is a derivative of Maximum Likelihood detector.
(2)
Where Ω denotes the set containing all possible modulation points. After structuring the channel with QR decomposition equation (2) can be rewritten as:
(3)
H=QR where Q is a unitary orthogonal matrix and R is an upper triangular matrix whose diagonal possesses real valued positive entries. Equation (3) can be represented by a tree structure with m levels and each node in the tree containsΩchild nodes. The level m represents the highest level of the tree, the m-1 represent the next highest and so on. Thus, the ML solution can be achieved by finding the path with the smallest path metric in the tree construction. A tree search representation is shown in figure 3.
Copyright © 2013 IJECCE, All right reserved 1529
International Journal of Electronics Communication and Computer Engineering Volume 4, Issue 5, ISSN (Online): 2249–071X, ISSN (Print): 2278–4209
III. P
ROPOSEDSD A
LGORITHMThe basic principle of Schnorr- Euchner (SE-SD) was proposed in [8]. When the sphere decoder follows a tree search it examines each possible node in the constellation and calculates the Partial Euclidean Distance (PED). If a node does not follow the sphere constraint it will not contribute to the ML solution and thus can be prune.
The rules of defining the initial radius to provide appropriate sphere constraint can be mentioned as [9]:
Fixed Radius:
The radius dr could be fixed resulting in fixed radius SD. A fixed radius prunes the less aggressive nodes at an early stage. The value of dr can be determined through calculation as well as experiments.Normalized Radius:
The radius could be defined to be dependent on the cost of the Kth node at each level. This will correspond to reducing the probability of pruning the true solution by a constant ratio compared to the conventional SD. It is called normalized radius because the radius dr is updated in the search radiusAdaptive Radius:
This is an SNR dependent approach of radius selection. With this approach the radius decreases with the increase in SNR. The motivation of this threshold choice lies in the fact that the cumulative costs are larger in the low SNR region while they are smaller in the high SNR region. Therefore a larger dr is needed for low SNR regions and smaller dr is needed for high SNR regions.The complexity of the SD is calculated by the number of times it repeatedly searches the sub lattices. The repeated tree search can be Early Terminated (ET) as soon as the partial vector smaller than the pre-calculated radius is obtained. Thus, if SE-SD algorithm terminates as soon as it reaches the convergence radius, the huge amount of unnecessary computations are prevented. Early Termination is a potential mean for saving computational complexity in iterative algorithms like SD. Consequently, the complexity of the algorithm is reduced considerably.
In this paper an adaptive radius approach is used for designing the proposed ET-SD. The method of choosing radius based on scaled version of noise variance is used in the thesis can be defined as below:
= (4)
Where n = 2max(M,N), σ2is the noise variance and α is a variable parameter and chosen to ensure that at least a lattice point exists inside the sphere with a high probability. Thus α can be referred to as the ‘tuning factor’ The radius dr is small for high SNR values and it is high for small SNR values. This reduces the algorithm complexity by reducing the number of nodes visited by the algorithm.
IV. M
ATLABB
ASEDS
IMULATIONIn this part a comprehensive study of the performance, complexity using different modulation orders is conducted along with the SE-SD and the proposed SD. The simulation parameters for the proposed decoder are summarized in Table I.
Table I: Simulation Parameters Antenna Configuration
(Transmitting X Receiving Antennas)
4X4
SNR (dB) 0 to 30
Source Bernoulli Signal
generator Channel Characteristics AWGN Modulation and
Demodulation Type
M = 4, 8, 16, 32 Quadrature Amplitude Modulation (QAM)
A. Performance Evaluation:
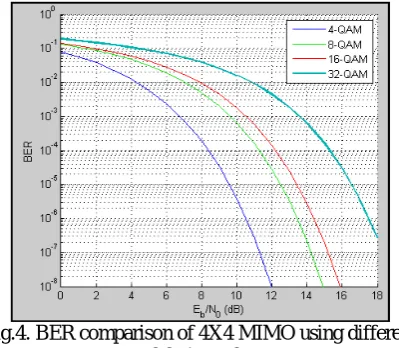
To evaluate the performance of the sphere decoder over an AWGN channel, simulations for QAM modulation with m=4, 8, 16, 32 have been performed. Each type of modulation performs differently in the presence of noise. In particular, higher order modulation schemes are able to carry higher data rates are not as robust in the presence of noise. Lower order modulation formats offer lower data rates but is more robust. The simulation results for the 4X4 MIMO are shown in Figure 4.
Fig.4. BER comparison of 4X4 MIMO using different modulation scheme
It is concluded from the simulations that due to the increase in the number of transmitted symbols by higher order modulation, higher value of SNR is required to maintain the BER ie the system complexity increases.
Copyright © 2013 IJECCE, All right reserved The simulation results of BER performance of the ML
detector, SE-SD and the proposed decoder using 16-QAM is shown in figure 5.
It is concluded from the figure that there is no considerable degradation in the performance at lower Eb/No and a suitable radius selection with optimum pre-processing could improve the BER performance at high Eb/No.
B. Complexity Comparison:
Figure 6 shows the complexity comparison of the conventional SE-SD and the proposed decoder using 16-QAM. The complexity is measured in terms of the number of nodes visited.Fig.6. Complexity comparison of SE-SD and the proposed decoder
It is verified from the simulation results that the proposed decoder searches a lower radius as compared to the conventional SE-SD, thus, there is a reduction in the complexity of the algorithm proposed. The reduction of complexity is about 41 % and 34 % at 18 and 24 dB SNR respectively.
V. I
MPLEMENTATIONR
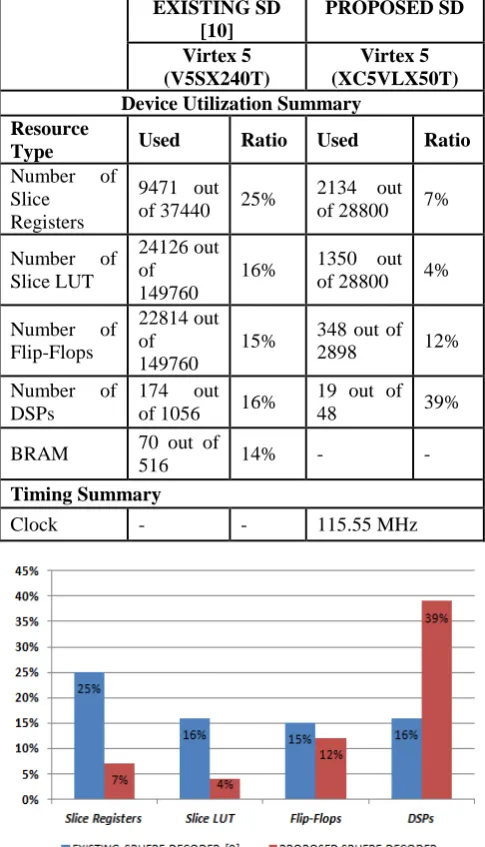
ESULTSFPGA-based rapid prototyping methodology is adopted in this work for performance investigation [10]. The decoder is synthesized targeting Xilinx Virtex 5 FPGA for performance calculation in terms of area utilization and maximum clock used. The resource utilization and timing summary of the proposed decoder compared to [10] is shown in table II.
Figure 7 shows the comparative graphs of the proposed decoder with [10]. The FPGA implementation result comparison shown in table II and graphs in figure 7 shows an overall improvement in the resource utilized (number of slice registers, number of slice LUT, number of flip-flops) that contributes most to the area utilization. The proposed decoder uses QR decomposition in the pre-processing stage. This decomposition has a simplest structure thus occupies lower resources. There is a considerable reduction in the number of slice registers, number of slice LUT, number of flip-flop.
Table II: Resource utilization and Timing summary of the proposed decoder
EXISTING SD [10]
PROPOSED SD
Virtex 5 (V5SX240T)
Virtex 5 (XC5VLX50T) Device Utilization Summary
Resource
Type Used Ratio Used Ratio
Number of Slice Registers
9471 out of 37440 25%
2134 out of 28800 7% Number of
Slice LUT
24126 out of 149760
16% 1350 out of 28800 4% Number of
Flip-Flops
22814 out of 149760
15% 348 out of
2898 12%
Number of DSPs
174 out
of 1056 16%
19 out of
48 39%
BRAM 70 out of
516 14% -
-Timing Summary
Clock - - 115.55 MHz
Copyright © 2013 IJECCE, All right reserved 1531
International Journal of Electronics Communication and Computer Engineering Volume 4, Issue 5, ISSN (Online): 2249–071X, ISSN (Print): 2278–4209
Fig.8. Proposed-Decoder Resource Utilization in different target platform
VI. C
ONCLUSIONThis paper presents a Sphere Decoder that has an optimized performance in terms of BER, complexity and FPGA resource utilization. The improvement in BER and FPGA resource utilization is because of the optimum pre-processing stage whereas the reduction in complexity is because of adaptive radius reduction technique. Further work can be done on reducing the complexity of complex higher order MIMO systems. MIMO provides high performance and spectral efficiency thus there is a demand for design platforms that evaluate new algorithms under realistic conditions. FPGA have simpler design cycle and are reconfigurable nature. The flexibility and the utilization of FPGA resources can be very efficient for embedded hardware implementations of future generations of wireless communications systems. The decoder can be used in various wireless networks with MIMO antenna processing and fast adaptive modulation, including 3G, 4G wireless system. More efficient MIMO systems can be designed by their VLSI implementation.
R
EFERENCES[1] Z. Guo and P. Nilsson, “Algorithm and implementation of the K -best sphere decoding for MIMO detection,” IEEE Journal on Selected Areas in Communication, Vol. 24, no. 3, pp. 491–503, March 2006.
[2] Chung-An Shen and Ahmed M. Eltawil, Member, IEEE, “A Radius Adaptive K-Best Decoder With Early Termination: Algorithm and VLSI Architecture”, IEEE Transactions On Circuits And Systems, Vol. 57, No. 9, pp. 2476-2486, September 2010.
[3] Qingwei Li, and Zhongfeng Wang, “Early-Pruning K-Best Sphere Decoder forMIMO Systems”,IEEE workshop on Signal Processing Systems, pp 40-44 , October 2007.
[4] Shuangshuang Han and Chintha Tellambura , “A Complexity -Efficient Sphere Decoder for MIMO Systems”, IEEE International conference on Communication, pp 1-5, June 2011 [5] Guanghui Liy, Xin Zhangz, Sheng Leix, Cong Xiong, and
Dacheng Yangz, “An Early Termination-based Improved Algorithm for Fixed-complexity Sphere Decoder”, IEEE Wireless Communications and Networking Conference, pp 624-629, April 2012.
[6] M. W. Numan, M. T. Islam, and N. Misran, “An Efficient FPGA-Based Hardware Implementation of MIMO Wireless Systems”, IEEE Conference on Network and Digital Signal Processing, 2010, pp 152-156.
[7] Xiang Wu, John S. Thompson,“FPGA Implementation of an Efficient High-Throughput Sphere Decoder for MIMO Systems Based on the Smallest Singular Value Threshold”, IEEE Conference on Adaptive Hardware and Systems, pp. 340-345, 2010
[8] Erik Agrell, Thomas Eriksson, Alexander Vardy and Kenneth Zeger. “Closest Point Search in Lattices”,IEEE Transaction on Information Theory, Vol. 48, No. 8, pp. 2201-2214, Aug. 2002. [9] Shuangshuang Han, Tao Cui, and Chintha Tellambura,
“Improved K-Best Sphere Detection for Uncoded and Coded MIMO Systems”, IEEE wireless Communication letters, Vol.1, issue-5,pp 472-475, October 2012.
[10] Xiang Wu and John S. Thompson, “A Fixed-Complexity Soft-MIMO Detector via Parallel Candidate Adding Scheme and its FPGA Implementation”, IEEE Communications Letters, Vol. 15, No. 2, pp. 241-243, February 2011.
Author’s Profile:
Abha Chauhan
Miss Abha Chauhan is pursuing her M.E. in Electronics and Communication Engineering from NITTTR, Chandigarh, India. She has done her B. Tech in Electronics and Communication Engineering from SDCET, U.P., India. Her areas of interest are Wireless Communication, Signal processing, embedded system design. Her current research is also based on Wireless Communication and Signal processing. Miss Abha is a member of ISTE.