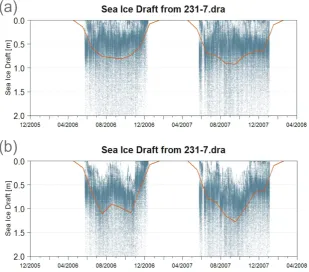
Sea ice draft in the Weddell Sea, measured by upward looking sonars
Full text
Figure
Related documents
The United States Supreme Court held that the admission, at ajoint trial, of an unavailable codefendant's confession implicating the other codefendant, violates the right
Principals support ongoing investigation and evaluation of diverse teacher education models and practical experience placements, including
In cases of severe thiamine deficiency, however, a broad enzymatic deficiency encompassing all three mitochondrial TPP- dependent enzymes would be expected to result in symptoms
For establishments that reported or imputed occupational employment totals but did not report an employment distribution across the wage intervals, a variation of mean imputation
see P ISANY -F ERRY , S APIR , V ERON & W OLFF , supra note 2, at 10, and ECB, Opinion of November 27, 2012 on the proposal for a Council Regulation entrusting the
While since then the SCADA data have been refined (i.e the measurements points have a lower uncertainty), and some of the models have been re-factored for offshore conditions, the
The proposed Center for Statistics and Application in Forensic Evidence (CSAFE) is a National Institute for Standards and Technology (NIST) sponsored national center of excellence
