P. Lang, A. Sarishvili, A. Wirsen
Blocked neural networks for
knowledge extraction in the
software development process
© Fraunhofer-Institut für Techno- und Wirtschaftsmathematik ITWM 2003 ISSN 1434-9973
Bericht 56 (2003)
Alle Rechte vorbehalten. Ohne ausdrückliche, schriftliche Gene h mi gung des Herausgebers ist es nicht gestattet, das Buch oder Teile daraus in irgendeiner Form durch Fotokopie, Mikrofi lm oder andere Verfahren zu reproduzieren oder in eine für Maschinen, insbesondere Daten ver ar be tungsanlagen, verwendbare Sprache zu übertragen. Dasselbe gilt für das Recht der öffentlichen Wiedergabe.
Warennamen werden ohne Gewährleistung der freien Verwendbarkeit benutzt.
Die Veröffentlichungen in der Berichtsreihe des Fraunhofer ITWM können bezogen werden über:
Fraunhofer-Institut für Techno- und Wirtschaftsmathematik ITWM Gottlieb-Daimler-Straße, Geb. 49 67663 Kaiserslautern Germany Telefon: +49 (0) 6 31/2 05-32 42 Telefax: +49 (0) 6 31/2 05-41 39
Vorwort
Das Tätigkeitsfeld des Fraunhofer Instituts für Techno- und Wirt schafts ma the ma tik
ITWM um fasst an wen dungs na he Grund la gen for schung, angewandte For schung
so wie Be ra tung und kun den spe zi fi sche Lö sun gen auf allen Gebieten, die für
no- und Wirt schafts ma the ma tik be deut sam sind.
In der Reihe »Berichte des Fraunhofer ITWM« soll die Arbeit des Instituts kon ti
nu ier lich ei ner interessierten Öf fent lich keit in Industrie, Wirtschaft und Wis sen
-schaft vor ge stellt werden. Durch die enge Verzahnung mit dem Fachbereich
the ma tik der Uni ver si tät Kaiserslautern sowie durch zahlreiche Kooperationen mit
in ter na ti o na len Institutionen und Hochschulen in den Bereichen Ausbildung und
For schung ist ein gro ßes Potenzial für Forschungsberichte vorhanden. In die
richt rei he sollen so wohl hervorragende Di plom und Projektarbeiten und Dis ser
-ta ti o nen als auch For schungs be rich te der Institutsmi-tarbeiter und In s ti tuts gäs te zu
ak tu el len Fragen der Techno- und Wirtschaftsmathematik auf ge nom men werden.
Darüberhinaus bietet die Reihe ein Forum für die Berichterstattung über die
rei chen Ko o pe ra ti ons pro jek te des Instituts mit Partnern aus Industrie und
schaft.
Berichterstattung heißt hier Dokumentation darüber, wie aktuelle Er geb nis se aus
mathematischer For schungs- und Entwicklungsarbeit in industrielle An wen dun gen
und Softwareprodukte transferiert wer den, und wie umgekehrt Probleme der
xis neue interessante mathematische Fragestellungen ge ne rie ren.
Prof. Dr. Dieter Prätzel-Wolters
Institutsleiter
Blocked neural networks for knowledge extraction
in the software development process
Patrick Lang, Alex Sarishvili, Andreas Wirsen
October 2003
Abstract
One of the main goals of an organization developing software is to
in-crease the quality of the software while at the same time to dein-crease the
costs and the duration of the development process. To achieve this,
vari-ous decisions effecting this goal before and during the development process
have to be made by the managers. One appropriate tool for decision
sup-port are simulation models of the software life cycle, which also help to
understand the dynamics of the software development process. Building
up a simulation model requires a mathematical description of the
inter-actions between different objects involved in the development process.
Based on experimental data, techniques from the field of knowledge
dis-covery can be used to quantify these interactions and to generate new
process knowledge based on the analysis of the determined relationships.
In this paper blocked neuronal networks and related relevance measures
will be presented as an appropriate tool for quantification and validation
of qualitatively known dependencies in the software development process.
Keywords:
Blocked Neural Networks, Nonlinear Regression,
Knowl-edge Extraction, Code Inspection
1
Introduction
During the last years various simulation tools focusing on different aspects in the
software development process were presented in the literature. They roughly can
be classified into continuous (system dynamics), discrete event or hybrid
simu-lation models. We especially are involved in developing a discrete event model,
which focuses mainly on the inspection process in the coding phase and the
test phase of the software life cycle (see [6],[7]). In comparison to a continuous
simulation model, choosing a discrete event approach allows a more detailed
representation of the organizational issues, products and resources. It is i.e.
possible to model programmers or inspectors with different skills or to consider
different types of software items with varying complexity and size.
Building up a simulation model requires the determination of input output
re-lationships at the different sub-processes of the software development process,
which are in case of considering a waterfall model the requirement, design,
cod-ing and test phase. In software engineercod-ing the software development process is
described by static qualitative models like control diagrams, flow diagrams and
cause-effect diagrams. Figure 1 shows as an example the control diagram, the
flow diagram and cause-effect diagram of an inspection process. These models
are in contrast to a simulation model not appropriate to study the dynamic
ef-fects occurring during the software development process. However, they provide
a general understanding concerning the chronology of tasks (control diagram),
the flow of the objects (flow diagram) and the qualitative dependencies of
ob-jects (cause-effect diagrams) and thus include the basic information needed for
building up a simulation model.
Figure 1: Qualitative models of the software inspection process. Top: Control
Diagram. Middle: Flow Diagram. Bottom: Cause-Effect Diagram
simula-tion model is explained. The model can be built by following step by step the
control and flow diagram (see figure 1). In this way activity blocks inside the
simulation model with their related inputs and outputs, i.e. items, stuff, etc.,
are determined. Inside an activity block the relationships between certain
vari-ables, qualitatively described by the corresponding cause-effect diagrams, then
have to be quantified by mathematical equations or logical rules. A cause-effect
diagram generally distinguishes between three types of variables:
•
process input variables, which do not depend on other variables,
•
process output variables, which do not effect other variables and
•
internal process variables, which are explaining other variables and are
also explained by other variables.
Based on the cause-effect diagram one step by step chooses each of the
internal and output variables as the explained variable and their corresponding
predecessors as explaining variables. The related input output relationships
then have to be determined as a logical rule or a mathematical function.
Possible methods for quantifying the qualitatively known input output
re-lationships are expert interviews, pragmatic models, stochastic analysis and
knowledge discovery techniques. The choice of the actual technique depends
of course on the data or information available, i.e. measurement data from
experiments, linguistic descriptions, etc..
In this paper we assume that sufficient measurement data is given such that
an application of knowledge discovery techniques is possible. In a first step these
methods will be used for the quantification of the input output relationships.
Then, based on the identified mappings, new insight and rules for parts of the
considered process will be generated. In the example at the end we investigate
mathematical descriptions determining the
number of major defects found in an
inspection process
depending on the
effort
, the
size of the products
and other
variables as can be seen in the related cause-effect diagram (see figure 1).
The simplest approach for the quantification of an input output relationship
in form of a mathematical equation is to consider a linear regression problem:
x
j=
d
i=1
Y
jia
i+
j
, j
= 1
, . . . , n,
where
x
j∈
R
contains the j-th measurement of the output variable,
Y
j∈
R
dare vectors containing the measurements of the related input variables,
a
i∈
R
denote the d unknown regression coefficients and
j
is the measurement error of
the j-th variable.
However, due to saturation effects the influence of some of the input
vari-ables, like
skills of programmers or inspectors
or other human and document
properties, obviously is nonlinear. Therefore it seems quite reasonable to use a
generalized regression model.
More especially, we will consider an additive nonlinear regression model (AN)
of the form
x
j=
i
a
im
i(
Y
ji) +
j
, j
= 1
, . . . , n,
where
m
i:
R
→
R
, i
= 1
, . . . , d
are nonlinear twice differentiable functions
depending on further regression coefficients and
a
i∈
R
are again regression
co-efficients. AN models are reasonable generalizations of classical linear models,
since they conserve the interpretability property of linear models and
simul-taneously are able to reproduce certain nonlinearities in the data. It also is
possible to calculate and interpret the partial derivatives of an AN model. The
importance of the partial derivatives lies in relevance and sensitivity analysis.
The additive nonlinear regression function can be approximated by different
methods. The most common of them are so called back fitting algorithms [8]
with various smoothing operators, like:
•
Univariate regression smoothers such as local polynomial regression.
•
Linear regression operators yielding polynomial or parametric spline fits.
•
More complex operators such as surface smoothers.
In this paper we consider specially structured (block-wise) neural networks
for the estimation of the AN model. In [4], [9] it was shown that fully
con-nected neural networks are able to approximate arbitrary continuous functions
with arbitrary accuracy, furthermore in [10] it was proven that neural networks
are able to approximate the derivatives of regression functions. This result was
assigned in [16] to block-wise neural networks as estimators for nonlinear
addi-tive twice continuously differentiable regression functions and their derivaaddi-tives.
The network function consists of input and output weights for each unit in the
hidden layer, which have to be estimated from given measurement data. This
is done by minimizing the mean squared error over a training set. The
perfor-mance of the network is measured by the prediction mean squared error, which
is estimated by cross validation [3].
The network function estimated by the neural network will be used when the
model is created, i.e. it will be implemented in the model at the considered node
of the cause-effect diagram to calculate the output for a given input during the
simulation is running. Here one has to mention, that the structure of the
net-work in general remains unchanged for the developed simulation model since it
is based on qualitative models while the weights of the network function might
change for different software development processes and thus the neural network
has to be retrained with respect to the considered process. In the simulation
model the values of input variables of the equations have to be provided in the
considered activity block.
Now it will be shown that relevance measures calculated on the identified
network function also are an important tool in the context of the software
de-velopment process. The problem, which often occurs especially in modelling
the software development process is, that not for all input variables
measure-ment data are available. The granularity of the model determines the minimal
amount of measurement data needed for rule generation since all input and
out-put variables of the underlying qualitative model should be used at this step.
In case of missing measurement data for one or more variables one has to make
further assumptions or skip these variables. Relevance measures in this case
help to determine the impact of each input variable with respect to the output
variable. By considering the validation results and the corresponding relevance
measure, one can easily verify whether the estimated functional dependencies
describe the input output relationship in a sufficient manner, if the impact of
a skipped variable is too large or if an explaining (input) variable is missing
in the underlying qualitative model. In the latter case, the missing variable
should be determined by analyzing the set of all measured variables e.g. by
a case-based-reasoning method (see [20]) and a new rule has to be generated
for by incorporating the identified missing input variables or by applying other
knowledge discovery techniques. If a variable has only small relevance over its
whole measurement range it is redundant, i.e. it does not explain the
consid-ered output and thus can be skipped. Thus, a relevance measure can also be
used to validate the qualitative description of the dependencies given in the
cause-effect diagrams since the inputs for a node in the diagram are assumed
to be not redundant. Also the size of the impact of every input variable for a
given data set is available and might give the manager a new insight into the
considered software development process. Thus, the relevance measure might
help to provide the manager a new rule of thumb.
Using the blocked neural network approach two aspects mentioned above
will be considered, which are
1. the quantification of the qualitative models
2. and analyzing of the determined mathematical equations in order to find
a more deep insight into the input output relationship by relevance or
sensitivity analysis.
Currently, we analyze data on historical software development processes coming
from a large company. Unfortunately, these data (which were not collected for
the purpose of fitting a simulation model) cover only some of the variables
re-quired for building the desired discrete event simulation model of the inspection
process. For instance, considering the cause-effect diagram of the inspection
process (see figure 1), information on the assignment of tasks to persons, skills
and individual working times is missing. However, our approaches from neural
networks describe an appropriate idea how the input output relationship could
be achieved and how to determine the impact of the input variables with respect
to the considered output based on the identified mapping.
2
Neural network modelling
Neural networks provide a convenient language game for nonlinear modelling.
They are typically used in pattern recognition, where a collection of features is
presented to the network, and the task is to assign the input to one or more
classes. In [13] it is shown that arbitrary complex decision regions, including
concave regions, can be formed using four-layer neural networks. In [11] the
abil-ity of three-layer networks to form several complex decision regions in pattern
recognition applications is demonstrated by simulations.
Another typical use for neural networks is the field of nonlinear regression
problems. In [2], [4], [9], [1], it is shown independently, that neural networks
with linear output and single hidden layer with sigmoid activation function can
approximate any continuous regression function uniformly on compact domains.
Neural networks typically exhibit two types of behavior. If no feedback loops
are present in the network connections, the signal produced by an external input
moves in only one direction and the output of the network is given by the output
of the last layer neurons. In this case a neural network behaves mathematically
like a static nonlinear mapping of the inputs. This feedforward type of networks
therefore is most often used for nonlinear function approximation. The second
kind of network behavior is observed when feedback loops are present. In this
case the network behaves like a dynamical system, and the outputs of the
neu-rons are functions of time. The neuron outputs can for example oscillate, or
converge into a steady state.
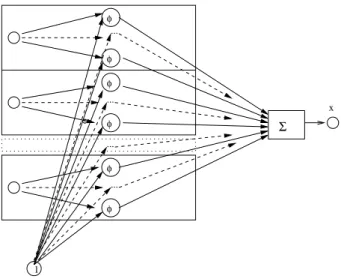
In this paper we consider feedforward neural networks with one hidden layer
to solve regression problems occurring during modelling the software life cycle.
The structure of such a neural network is depicted in figure 2.
w
11v
v
v
1 j dφ
φ
φ
Σ
1
1
v
0y
y
y
w
w
w
01 0jw
ij 1 j dw
x
dH 0HFigure 2: Feedforward neural network.
The output of the feedforward neural network is computed as:
f
nn(
Y, θ
) =
v
0+
H
h=1
v
hφ
Y
·
w
h,
(1)
where
θ
= (
w
1, ..., w
H, v
0, ..., v
H) is the vector of network weights, with
w
h=
(
w
0h, ..., w
dh) for
h
= 1
, ..., H
and
H
denotes the number of neurons in the
hidden layer. Moreover,
φ
is the activation function from each hidden unit
and
Y
= (1
, y
1, ..., y
d) denotes the vector of inputs. More about the special
architecture of the neural networks considered in this paper will be discussed in
the next sections.
Based on the given input output data the network parameters are estimated
via convenient learning algorithms. In the case of feed forward networks usually
a variant of the famous backpropagation algorithm is used.
2.1
Variable significance testing
If one not only is interested in obtaining a good input output approximation,
but one further wants to get more insight into the structure of the underlying
function, different postprocessing methods can be applied to the trained
net-work. In order to derive the significance of each neural network input variable
based on the derived function various statistical hypothesis tests can be used.
In general, this involves the following main steps:
•
the definition of a convenient relevance measure,
•
estimating the defined relevance of each input variable with respect to the
corresponding model output,
•
estimating the sampling variability of the selected relevance measure,
•
testing the null hypothesis of irrelevance.
In the next section we introduce some classical relevance measures that are
often used in the case of neural networks.
2.2
Classical relevance measures in the neural network
ap-proach
We consider the following regression problem:
x
i=
M
(
y
1i, ..., y
di) +
i
, i
∈
[1
, ..., N
]
,
where
i
is i.i.
N
(0
, σ
2) distributed noise, the function
M
:
R
d→
R
is Borel
measurable and twice differentiable at any
i
∈
[1
, ..., N
]. We now approximate
the true regression function
M
with a neural network approximator:
ˆ
x
i=
f
nn(
y
1i, ..., y
di,
θ
ˆ
) +
i
,
ˆ
θ
=
arg
min
Θ∈ΘHN i=1
(
x
i−
f
nn(
y
1i, ..., y
di,
Θ))
2,
The most common measure of relevance is the average derivative (AD), since
the average change in ˆ
x
for a very small perturbation
δy
j−→
0 in the
indepen-dent variables
y
jis simply given by:
AD
(
y
j) =
1
N
N i=1∂
ˆ
x
i∂y
ji,
(2)
where ˆ
x
is the vector of estimated regression outputs. Sometimes ˆ
x
is sensitive
to
y
jonly for a small percentage of input vectors
y
j. Such requirements give
rise to the following measure of relevance, that can be quite important in the
context of particular applications.
M axD
(
y
j) =
max
i=1,...,N∂
x
ˆ
i∂y
ji.
Another quantification of ˆ
x
’s sensitivity to
y
j, is the average percentage change
in ˆ
x
for a one percent change in
y
j, a measure that is commonly known as the
”Average Elasticity” of ˆ
x
to
y
j[15]:
AvE
(
y
j) =
1
N
N i=1∂
x
ˆ
i∂y
jiy
jiˆ
x
i,
x
ˆ
i= 0
∀
i
= 1
, ..., N.
(3)
Another measure describes the average contribution of the
y
j’s to the
mag-nitude of the gradient vector. Therefore a measure of sensitivity, namely the
”standard deviation” of the derivatives across the sample measuring the
disper-sion of the derivatives around their mean, is computed:
SD
(
y
j) =
1
N
N i=1∂y
∂
x
ˆ
jii−
N
1
N k=1∂
x
ˆ
k∂y
jk 2
1 2.
Normalizing
SD
(
y
j) by the mean, provides us with the coefficient of variation
that is the standard deviation per unit of sensitivity:
CV
(
y
j) =
SD
(
y
j)
1 N N k=1∂y∂ˆxjkk.
All the described relevance measures share the disadvantage that for
stan-dard (fully connected) feedforward networks, the partial derivatives in general
depend on all input variables. Therefore the interpretation in terms of the
rele-vance of a single input variable is difficult. One method to avoid this problem is
to set all variables except the considered variable
y
jto their mean values. This
however leads to a significant loss of information. Another method consists in
using blocked neural networks as universal function approximators, a method
that is described in the next sections.
At the end of this paper we will compare and discuss the results of a relevance
analysis for a software development process based on the measures
AD
and
AvE
.
2.3
Additive nonlinear(AN) regression models
As described before, we use ANs for understanding software development
pro-cesses profiting from the advantages of ANs, like interpretability and flexibility,
compared to other methods. In this section we define a general form AN model
and state main assumptions that should be fulfilled if ANs are chosen for
mod-elling.
Let
Y
∈
R
d×Nbe a design data matrix, where each column refers to a
sin-gle observation and each row to an attribute. In the following we describe an
additive nonlinear regression problem.
Assumption 2.1.
The function
M
:
R
d−→
R
that describes the true
relation-ship between the dependent variables
x
i∈
R
, i
= 1
, ..., N
, and the data design
matrix
Y
exists.
Assumption 2.2.
The conditional expectation function
M
:
R
d−→
R
,
M
(
Y
) =
E
{
x
|
(
y
1i, ..., y
di) =
Y
}
has an additive structure, i.e.
M
(
Y
) =
m
1(
y
1i) +
...
+
m
d(
y
di)
,
where
m
j:
R
−→
R
,
∀
j
= 1
, ..., d
.
Definition 2.3.
An Additive Nonlinear (AN(d)) model for any variable
x
i∈
R
, i
= 1
, ..., N
is defined by,
x
i=
m
1(
y
1i) +
...
+
m
d(
y
di) +
i
, i
= 1
, ..., N
(4)
where
i
is i.i.
N
(0
, σ
2)
distributed with finite variance.
In the course of this paper we estimate the function
M
by fitting feedforward
neural networks with block structure to the data.
The optimal network hereby is determined by minimizing the mean squared
prediction error.
2.4
AN model estimation with blocked neural networks
Taking into account the special structure of the composite function
M
, which
results from summing up
d
functions of mutually different real variables, a
feed-forward network with one hidden layer and without ”nonparallel” input to
hid-den layer connections seems to be convenient for its approximation. Figure 3
1 2 d φ
Σ
φ ... φ ... y y φ φ ... ... φ x y 1 ... φFigure 3: Blocked neural network.
shows such a blocked neural network with
d
inputs and one output. Especially,
each neuron in the hidden layer accepts only one variable as input apart from
the constant bias node.
The output of the blocked neural network is given as:
x
i=
f
nn(bl)(
y
1i, ..., y
di,
Θ)
=
H(1) i=1
v
iφ
(
y
1iw
i+
b
i) +
...
+
H(d) i=H(d−1)+1
v
iφ
(
y
diw
i+
b
i)
,
(5)
where the difference
H
(
j
)
−
H
(
j
−
1)
,
∀
j
= 2
, ..., d
is the number of neurons in
block
i
, and
H
(
d
) denotes the total number of neurons in the hidden layer. The
w
js are the weights from the input to the hidden layer, the
v
js are the weights
from the hidden to the output layer, the
b
js are the biases and Θ denotes
the vector of all neural network parameters together. The neuron activation
function is chosen to be of sigmoidal type, i.e.:
φ
(
x
) =
ex−e−xex+e−x
.
The neural network training consists of minimizing the mean squared error
over all training samples resulting in the optimal network parameters:
ˆ
θ
=
arg
min
Θ∈ΘH N i=1(
x
i−
f
nn(bl)(
y
1i, ..., y
di,
Θ))
2,
where Θ
His a compact subset of the parameter space. In the following the
supscripts of f are skipped.
The following theorem describes the approximation abilities of such a neural
network.
Theorem 2.4.
Let
φ
(
·
)
be a nonconstant, bounded and monotonic increasing
continuous function. Let
K
be a compact subset of
R
dand
k
≥
1
a fixed integer.
Then any continuous mapping
F
:
K
−→
R
with
F
(
y
1, ..., y
d) =
f
1(
y
1) +
...
+
f
d(
y
d)
, where
f
j:
R
−→
R
,
j
= 1
, ..., d
are continuous and
K
⊂
Domain
(
f
j)
,
can be approximated in the sense of uniform topology on K by blocked networks
with one hidden layer, where the hidden layer functions are chosen as
φ
(
·
)
and
the input and output layer are defined by arbitrary linear functions.
This theorem is identical to the general theorem presented by [4] except the
assumption that the function
F
is a sum of
d
continuous functions and therefore
continuous itself. Thus the proof is analogous to the proof in [4].
Note, that multilayer feedforward neural networks not only are capable of
arbitrary accurate approximations for unknown mappings, but further they also
can be used to estimate simultaneously the related derivatives, see [10].
2.4.1
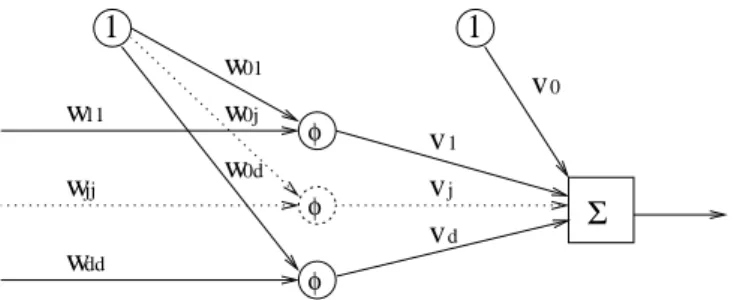
Derivatives in blocked neural networks.
In this section we derive the important property of blocked neural networks
consisting in the special relation between the expected partial derivatives of the
network function with respect to the input variables and the partial derivatives
with respect to the network weights. For simplification we consider a blocked
neural network with only one neuron in each block, see figure 4. All results
shown in this section are also transferable to arbitrary connected blocked neural
networks.
w
11w
w
dd jjv
v
v
1 j dφ
φ
φ
Σ
1
1
v
0y
y
y
w
w
w
01 0j 0d d j 1x
Figure 4: Blocked neural network with one neuron in each block.
The considered network function then has the form:
f
(
y, θ
) =
v
0+
d
j=1
where
y
jis the
j
-th coordinate of
y
. If
φ
is differentiable, as we always assume,
the derivatives w.r.t.
y
jand w.r.t. the parameter
w
jjare given as:
∂f
(
y, θ
)
∂y
j=
v
jφ
(
w
0j+
w
jjy
j)
w
jj∂f
(
y, θ
)
∂w
jj=
v
jφ
(
w
0j+
w
jjy
j)
y
j.
Based on these identities the following theorem can be proven.
Theorem 2.5.
For a blocked neural network with one neuron in each block, we
consider
C
j:=
E
∂f
(
y, θ
)
∂w
jj,
R
j,1:=
E
∂f
(
y, θ
)
∂y
j,
R
2j,2:=
E
∂f
(
y, θ
)
∂y
j 2.
a) If the
j
-th input variable is bounded with essential supremum
||
y
j||
∞, then
|
w
jj|
C
j≤ ||
y
j||
∞R
j1b) In general, we have
|
w
jj|
C
j≤
E
(
|
y
j|
2)
R
j2.
Proof
a)
C
j=
E
∂f
(
y, θ
)
∂w
jj=
|
v
j|
E
|
φ
(
w
0j+
w
jjy
j)
| · |
y
j|
≤ |
v
j| · ||
y
j||
∞E
|
φ
(
w
0j+
w
jjy
j)
|
=
||
y
j||
∞|
w
jj|
E
∂f
∂y
(
y, θ
j)
=
||
y
j||
∞|
w
jj|
R
j,1b)
C
j2=
E
∂f
(
y, θ
)
∂w
jj 2=
v
2jE
|
φ
(
w
0j+
w
jjy
j)
| · |
y
j|
2≤
v
2jE
(
|
φ
(
w
0j+
w
jjy
j)
|
2)
E
(
|
y
j|
2)
=
E
(
|
y
j|
2)
w
2jjE
∂f
(
y, θ
)
∂y
j 2=
E
(
|
y
j|
2)
w
2jjR
2 j,2,
where the inequality is derived using Bunjakowski-Schwarz.
The theorem tells us that
R
j,1and
R
j,2may be interpreted as relevance measures
of the
j
-th input variable with respect to the considered network output. If e.g.,
R
j,1is smaller than either
|
w
jj|
or the mean of
∂f∂w(y,θ) jjor if both expressions are
small, then the
j
-th hidden neuron, describing the dependency of the network
output on the variable
y
jis negligible.
For the sake of completeness, we state this qualitative property which is also
applied in other parts of neural network theory, as a lemma.
Lemma 2.6.
Under the conditions of Theorem 2.5, the
j
-th variable
y
jhas
little influence on the network output, if the derivative
∂f∂y(y,θ)j
is small in average
measured by either
R
j,1or
R
j,2.
Remark 1.
In the case of
φ
being the identity, the neural network function
reduces to
f
(
y, θ
) =
v
0+
d j=1v
jw
0j+
d j=1v
jw
jjy
j.
In that case,
R
j,1becomes
|
v
j·
w
jj|
. So
R
j,1is the coefficient of the input variable
y
j. Obviously, the influence of
y
jfor the output is small, whenever
R
j,1is small
2.4.2
Relevance measures and partial derivative plots
As already discussed in the previous sections relevance measures estimated from
regression functions can be used to determine the impact of every single input
variable with respect to the considered output.
In the linear case the partial derivatives coincide with the regression
coeffi-cients and thus are constants. In the case of a general nonlinear differentiable
regression model the computation of the relevance measures also is possible,
however in order to guarantee the interpretability of the results further
struc-tural properties have to be fulfilled. For AN models, like the considered blocked
neural networks, these properties hold (see section 2.4) and therefore the
im-pacts of the single input variables can be estimated.
In the following it will be explained, how a relevance measure and the partial
derivative plots are derived and how they are interpreted.
In order to compute the different relevance measures, the first partial
deriva-tives
∂f()∂yj
of the trained network function
f
(
·
,
Θ) with respect to each explaining
variable
y
j,
j
∈ {
1
, . . . , d
}
have to be determined. For the sigmoid neuron
acti-vation function of the network, the partial derivatives are calculated via:
∂f
(
y
1, . . . , y
d,
Θ)
∂y
j=
H
(j)
i=H(j−1)+1
v
i1
−
tanh
2(
b
i+
w
iy
j)
w
i, j
= 1
, . . . , d,
(6)
where
H
(
j
) is defined as in equation (5). Obviously, the partial derivative
explicitly only depends on the considered input itself, the influences of the other
variables is comprised in the network parameters Θ.
The partial derivative (PD) themselves already can be used to analyze the
impact of the input variables. Therefore, for each of the input variables a plot is
generated from the corresponding partial derivative, that is evaluated for each
given data pair. A large PD-value indicates that the influence of the related
input variable is strong for the considered output value, already small changes of
the input value will cause large changes on the output value. Vice versa a small
PD-value is an indicator for a weak dependency. Moreover, if the PD-values for
a certain input variable are small for all input values, then it is not considered
to be an explaining variable, i.e. it is redundant. If for a certain range of the
output all PD-values of all model input variables are small, then there is no
clear causal relationship between the inputs and the output at this range. One
reason for such an observation might be a missing input variable. Furthermore,
a positive PD-value indicates that an increase in the input value will lead to
an increase in the output value, whereas a negative PD-value indicates that an
increase in the input will lead to a decrease in the output. Although each of
the PD-values contains relevant information concerning the impact the related
input variable, due to outliers in the data set those interpretations could be
erroneous. Therefore one always should consider the PD-values of a complete
input interval, where one especially should focus on those ranges with a sufficient
number of data available.
Based on equation (6), the chosen relevance measure is computed by
eval-uating the corresponding equation for the given data set. In the following we
especially focus on the AD and AvE relevance measure.
The AD relevance measure estimates the mean influence of the input variable.
This number however should be interpreted with care, since i.e. a small
AD-value could be the result of the sum of large positive and large negative
PD-values. This measure also describes how changes in the output and the input
values are correlated in the mean. A positive AD-value indicates that in the
mean a positive change of the input value will increase the output value whereas
a negative AD-value indicates that the output value will decrease under such
input changes. The average elasticity (AvE) determines the average percentage
change in the output value assuming a one percent change in each of the input
values.
3
Quantification and analysis of an input
out-put relationship in the software development
process
In this section we apply the presented methods to an inspection process (coding
phase), being a part of the overall software development.
Figure 1 shows the qualitative models related to this process, i.e. the control
diagram, the flow diagram and the cause-effect diagram.
On the way to an implementation of the inspection process in terms of a
discrete event simulation model, one important step is the quantification of the
occurring input output relationships given as nodes in the related cause-effect
diagram (see figure 1). In the following we focus on one of those nodes with
Number of detected major defects in an inspection
being the explained variable
and
effort
,
size of the product (LOC)
and
inspected size of the product
being the
explaining variables. Further input variables, that according to the cause-effect
diagram also are influencing the chosen output, cannot be considered since no
measurement data is available.
A linear regression model and a blocked neural network with one neuron in
each block in the hidden layer were both trained based on the available data
set. The cross validation performance (leave one out) of both models is shown
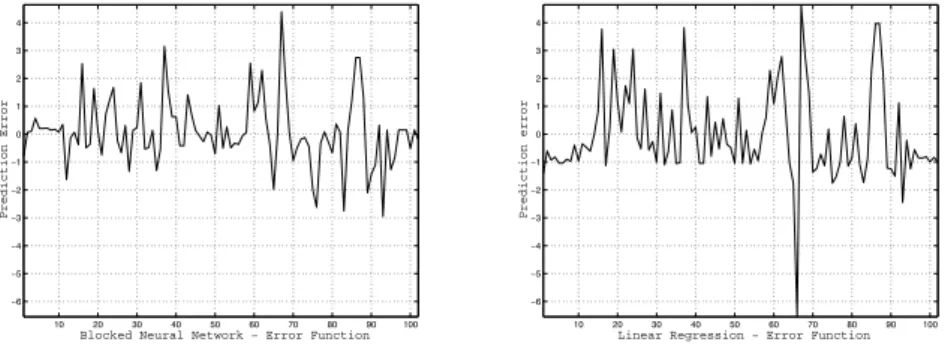
in figure 5 and figure 6. Especially by considering the error plots for each model
(see figure 6), one notices that the performance of the blocked neural network
is much better compared to the linear regression model. This observation is
confirmed by comparing the mean absolute errors, which is 0.8 for the blocked
neural network and 1.2 for the linear regression model. This means that the
neural network produces in the mean a prediction error of 0.8
major defects
per
document, compared to 1.2
major defects
for the linear regression model. Thus,
the nonlinear approach should be used to quantify the input output relationship
at the considered node. Based on the existing qualitative knowledge one would
expect that the performance of both models could be increased if the skipped
10 20 30 40 50 60 70 80 90 100 1 2 3 4 5 6 7 8 9 10
Blocked Neural Network − Cross Validation Performance 0.81143
No. of detected defects
10 20 30 40 50 60 70 80 90 100 1 2 3 4 5 6 7 8 9 10
Linear Regression − Cross Validation Performance 1.2316
No. of detected defects
Figure 5: Left: Performance of the blocked neural network. Right: Performance
of the linear regression model. Dashed line: Prediction. Solid line: Measurement
10 20 30 40 50 60 70 80 90 100 −6 −5 −4 −3 −2 −1 0 1 2 3 4
Blocked Neural Network − Error Function
Prediction Error 10 20 30 40 50 60 70 80 90 100 −6 −5 −4 −3 −2 −1 0 1 2 3 4
Linear Regression − Error Function
Prediction error
Figure 6: Left: Error between network prediction and measurement. Right:
Error between linear prediction and measurement.
variables like
human effects
,
complexity
or
familiarity with the product
were also
used as input variables of the models. The trained network function now can
be plugged into the simulation model and then can be used to determine the
number of detected major defects found in an inspection
during the simulation
runs.
Based on the trained blocked neural network we now compute and interpret
the partial derivatives and the relevance measures AD and AvE. The stability of
the calculated PDs for the considered neural network was proven by retraining
the neural network several times.
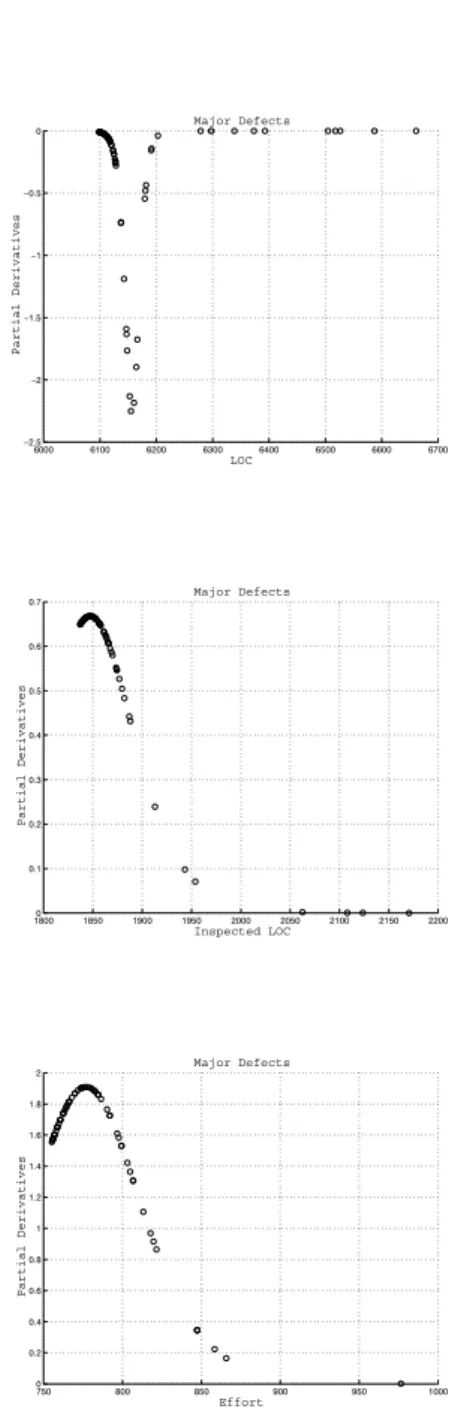
Figure 7 shows the plots of the partial derivatives of the variable
major
defects
with respect to all used input variables . One observes that the variables
whole range, while the variable
size of the product
only possesses negative
PD-values.
Considering the plot for the variable
effort
in more detail one notices that
for an actual effort in the range of 750 to 850 units increasing the effort while
leaving the remaining input variable unchanged leads to a significant increase
in the number of found defects. Obviously, the largest benefit for an increase
in the working effort in terms of additionally found major defects is obtained
around 775 units. An increase of the effort for documents with an actual value
already greater than 850 units only will lead to a slight increase in the number
of found defects, i.e. a saturation effect occurs. Thus, based on the PD-plot for
the variable effort and the known costs for each effort unit a software manager
approximately can determine the effort he would like to spend for the
inspec-tion. An analogous behavior of the partial derivatives can be observed for the
variable
inspected size of the product
. In contrast to the already considered
two input variables the explaining variable
size of the product
has negative or
zero partial derivatives. This means leaving the variable
effort
and
inspected
size of the product
unchanged and increasing the
size of the product
leads to a
smaller number of detected defects. One has to keep in mind that in this case
smaller percentage of the document will be inspected and that the effort and
the inspected lines of code are unchanged.
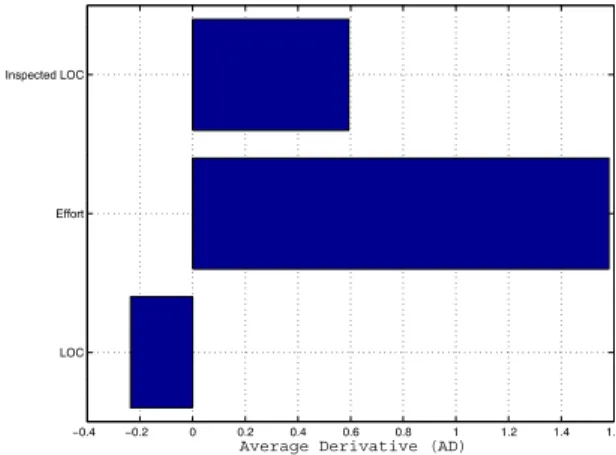
Figure 8 depicts of the AD-relevance measures (2) of the inputs, whereas
figure 9 displays the corresponding AvE-measures (see equation (3)). In both
figures one observes that the variable
effort
has the largest impact with respect
to the variable
detected major defects in the inspection
. As explained in the
last section the mean sign of correlation between the inputs and the output
can be determined by the AD-value, which is positive for the variables
effort
and
inspected size of the product
and negative for the variable
size of the product
.
All in all, the partial derivatives as well as the relevance measures contain
important quantitative information about the influence of the input variables
with respect to the considered output and thus provide the software manager
with a more detailed insight into the structure of the input output relation. He
especially gets able to estimate the impact of changes in the process.
In general the partial derivatives, the AD and AvE relevance measures also
can be used to validate a cause-effect diagram. Due to the lack of data this
aspect is not considered here in detail. In general the derived methodology
allows to check whether a variable is missing or redundant in the cause-effect
diagram, or if the signs indicating the direction of correlation between the input
and output are correct for the considered output node.
6000 6100 6200 6300 6400 6500 6600 6700 −2.5 −2 −1.5 −1 −0.5 0 Major Defects LOC Partial Derivatives 18000 1850 1900 1950 2000 2050 2100 2150 2200 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Major Defects Inspected LOC Partial Derivatives 750 800 850 900 950 1000 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 Major Defects Effort Partial Derivatives
Figure 7: Plot of partial derivatives for the variable
Number of detected defects
in an inspection
with respect to the variables
size of the product
(top),
inspected
−0.4 −0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 LOC
Effort Inspected LOC
Average Derivative (AD)
Figure 8: Plot of Average Derivative (AD)
0 5 10 15 20 25 30 35
LOC Effort Inspected LOC
Average Elasticity (AvE)