Vol. 9, No. 4, 2016, 419-433
ISSN 1307-5543 – www.ejpam.com
Hutton Uniformity in the Context of Fuzzy Soft Sets
Vildan Çetkin
∗, Halis Aygün
Department of Mathematics, Kocaeli University, Umuttepe Campus, 41380, Kocaeli, TURKEY
Abstract. In this paper, we introduce the concept of fuzzy soft uniformity in Hutton’s sense. We de-fine topological fuzzy soft remote neighborhood system and use this for investigating the relationship between fuzzy soft cotopology and fuzzy soft (quasi-)uniformity. We show the existence of the initial structure of fuzzy soft uniformities and also we prove the category of fuzzy soft uniform spaces is a topological category overSET3.
2010 Mathematics Subject Classifications: 54A05,54A40,54E15
Key Words and Phrases: Fuzzy soft set, Fuzzy soft topology, Fuzzy soft remote neighborhood, Fuzzy soft uniformity
1. Introduction
In 1999, Molodtsov[12]proposed a completely new concept called soft set theory to model uncertainty, which associates a set with a set of parameters. Later, Majiet al. [11]introduced the concept of fuzzy soft set which combines fuzzy sets and soft sets. Soft set and fuzzy soft set theories have a rich potential for applications in several directions. Up till now there are many spectacular and creative works about the theories of soft set and fuzzy soft set in the literature (see [2, 3, 8, 9, 11, 13, 17]). Furthermore, Aygüno˘glu et al. [4] studied the topological structure of fuzzy soft sets based on the sense of Šostak[16].
It is well-known that uniformity is a very important concept close to topology and a con-venient tool for investigating topology. Fuzzy versions of (quasi-)uniformity theory were es-tablished by Hutton [7], Lowen [10], Höhle[6] and Shi[14, 15]. Fuzzy (quasi-)uniformity in Hutton’s sense has been accepted by many authors and has attracted wide attention in the literature, despite this.
In this paper, we give an approach to the concept of fuzzy soft uniformity in the sense of Hutton which is compatible with the fuzzy soft topology. The structure of this paper is orga-nized as follows. In Section 2, we give some preliminary concepts and properties. In Section 3, we give the definition of fuzzy soft remote neighborhood system and investigate relations
∗Corresponding author.
Email addresses:[email protected](V. Çetkin),[email protected](H. Aygün)
between fuzzy soft cotopological space and fuzzy soft remote neighborhood system. In Sec-tion 4, we define fuzzy soft uniformity in the sense of Hutton and we study the relaSec-tionship between fuzzy soft cotopology and fuzzy soft uniformity by using fuzzy soft remote neighbor-hood system. In the last section, we introduce and characterize the initial structure of fuzzy soft uniform spaces.
2. Preliminaries
Throughout this paper, L is a complete lattice, M is a completely distributive lattice and there is an order-reversing involution0on L. Leta,bbe elements in L. An elementain Lis said to be coprime if a ≤ b∨c implies thata ≤ b or a ≤ c. The set of all coprimes of L is denoted byc(L). We sayais way below (wedge below)b, in symbols,ab(aÃb) orba
(bÂa), if for every directed (arbitrary) subsetD⊆ L,∨D≥bimpliesa≤d for somed∈D.
Clearly if a∈ L is coprime, then a b if and only ifa à b. A complete lattice L is said to
be continuous (completely distributive) if every element in Lis the supremum of all elements way below (wedge below) it.
Proposition 1. [5]Let L be a complete lattice. The following conditions are equivalent: (i) L is completely distributive.
(ii) L is distributive continuous lattice with enough coprimes.
(iii) The operator∨:Low(L)→L sending every lower set to its supremum has a left adjointβ, and in this caseβ(a) ={b| bÃa}.
From (iii) in the above proposition it is easy to see that the wedge below relation has the interpolation property in a completely distributive lattice, this is to say,aà bimplies there is
somec∈Lsuch thataÃcà b.
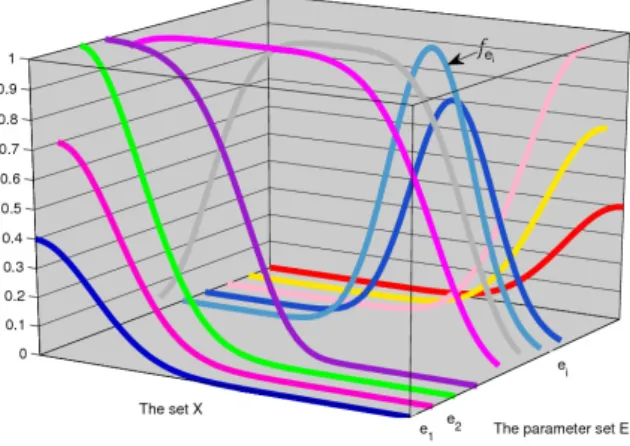
Let EandKbe arbitrary nonempty sets viewed on the sets of parameters. A fuzzy soft set
f on X, is a mapping from Einto LX, i.e., fe := f(e) is an L-fuzzy set onX, for each e∈E
(see Figure 1). The family of all L-fuzzy soft sets onX is denoted by(LX)E. By 0X and 1X, we denote respectively the null fuzzy soft set and absolute fuzzy soft set. The complement of an
L-fuzzy soft set f is denoted by f0, where fe0(x) = (fe(x))0. The set of all coprimes of(LX)E is denoted byc((LX)E).
Definition 1([1, 11]). (i) We say that f is a fuzzy soft subset of g and write f vg if fe≤ge, for each e∈E.
(ii) Union of f and g is the fuzzy soft set h= f tg, where he= fe∨ge, for each e∈E.
(iii) Intersection of f and g is the fuzzy soft set h= f ug, where he= fe∧ge, for each e∈E.
Figure 1: A fuzzy soft set f
Letϕ:X1−→X2andψ:E1−→E2be two functions, whereE1andE2 are parameter sets
for the crisp setsX1 andX2, respectively. DefineL-fuzzy soft mapping ϕψ→ : (LX1)E1 → (LX2)E2 and its L-fuzzy soft inverse mapping ϕ
ψ← : (LX2)E2 → (LX1)E1
by (ϕψ→(f))e2(y) = Wϕ(x)=yWψ(e1)=e
2 fe1(x), for all f ∈ (L
X1)E1, y ∈ X
2, e2 ∈ E2 and
(ϕψ←(g))
e1(x) =gψ(e1)(ϕ(x)), for alle1∈E1, x∈X1and g∈(L X2)E2.
We refer to[3, 4, 9, 11]for all the basic definitions and notations related to fuzzy soft sets and fuzzy soft mappings.
Definition 2([4]). A mappingτ:K→M(LX)E is called an(L,M)-fuzzy(E,K)-soft topology on X if it satisfies the following conditions for each k∈K,
(T1) τk(0X) =τk(1X) =1M.
(T2) τk(f ug)≥τk(f)∧τk(g)for each f,g∈(LX)E.
(T3) τk(Fi∈Λfi)≥Vi∈Λτk(fi)for each{fi}i∈Λ⊆(LX)E.
The pair(X,τ)is called an(L,M)-fuzzy(E,K)-soft topological space
Example 1. Let E be a parameter set, I = [0, 1], K = N be the set of natural numbers and
τ:K→I(IX)E be defined as follows: for all k∈K,
τk(f) =
¨
1, if f =0X, 1X,
1
k, otherwise.
(1)
It is easy to testify thatτis a fuzzy soft topology on X .
Definition 3([4]). A mappingT :K→M(LX)E is called an(L,M)-fuzzy(E,K)-soft cotopology on X if it satisfies the following conditions for each k∈K,
(C1) Tk(0X) =Tk(1X) =1M.
(C3) Tk(ui∈Λfi)≥
V
i∈ΛTk(fi)for all{fi}i∈Λ⊆(LX)E.
The pair(X,T)is called an(L,M)-fuzzy(E,K)-soft cotopological space.
Let (X1,T1) and (X2,T2) be an (L,M)-fuzzy (E1,K1)-soft cotopological space and an
(L,M)-fuzzy(E2,K2)-soft cotopological space, respectively. A fuzzy soft mapping
ϕψ,η:(X1,T1)→(X2,T2)is said to be continuous ifTk1(ϕ←ψ(g))≥ Tη2(k)(g) for each g∈(LX2)E2, k∈K
1, whereϕ :X1→X2,ψ:E1→ E2 andη:K1 →K2 are classical
functions.
Let FSCTOP(L,M) denote the category of(L,M)-fuzzy (E,K)-soft cotopological spaces and continuous mappings.
If T is an(L,M)-fuzzy (E,K)-soft cotopology onX, then τis an(L,M)-fuzzy(E,K)-soft topology onX, whereτ:K→M(LX)E is defined byτk(f) =Tk(f0), for eachk∈K.
Example 2. Let X = {x,y} be a classical set, E = {e1,e2}, K = {k1,k2} be parameter sets, L = M = I = [0, 1]. Define h∈(IX)E as follows: he1(x) = 0.6, he1(y) = 0.5, he2(x) = 0.8
and he2(y) =0.6. Then the mappingT :K →I
(IX)E which is defined as follows is a fuzzy soft
cotopology on X :
Tk(f) =
1, if f =0X, 1X,k∈K
0.7, if f =h,k=k1,
0, otherwise.
(2)
3. Fuzzy Soft Remote Neighborhood System
In this section, we define fuzzy soft remote neighborhood system and give the relationships between fuzzy soft remote neighborhood system and fuzzy soft cotopological space. If the parameter setsEandKare both one pointed, then we obtain the results given in the paper of
[18].
Definition 4. A topological fuzzy soft remote neighborhood system is a set
R={Rp|p∈c((LX)E)}of mappings Rp:K→M(LX)E such that for each k∈K: (RN1) Rpk(1X) =0M, Rpk(0X) =1M.
(RN2) Rpk(f)6=0M implies p6v f . (RN3) Rpk(f tg) =Rpk(f)∧Rpk(g).
(RN4) Rpk(f) =Wg∈p|f Vr6vgRrk(g).
(1) RT = {RpT | p∈c((LX)E)} is a topological fuzzy soft remote neighborhood system, where RpT is defined by for all k∈K, p∈c((LX)E)and f ∈(LX)E, as
(RpT)k(f) =
¨W
g∈p|f Tk(g), if p6v f;
0M, otherwise. (3)
(2) IfT andS are two(L,M)-fuzzy(E,K)-soft cotopologies which determine the same topolog-ical fuzzy soft remote neighborhood system, thenT =S.
Proof. By Definition 4, we need to show (RN4) in the following. First of all, (RN1)-(RN2) are trivial.
(RN3): Let k∈ K and f,g ∈(LX)E. From the definition of RTp, we have f v g implies
(RpT)k(f) ≥ (R p
T)k(g). This is to say (R p
T)k(f tg) ≤ (R p
T)k(f)∧(R p
T)k(g). Suppose that αÃ((RTp)k(f)∧(R
p
T)k(g)), whereα∈c(M). Then αÃ(R p
T)k(f)andαà (R p
T)k(g). Then there existu∈p| f andv∈p|gsuch thatα≤ Tk(u)andα≤ Tk(v). Therefore,
α≤ Tk(u)∧ Tk(v)≤ Tk(utv).
It is clear thatp6v(utv), f tgvutv. Hence by the definition ofRpT, we have α≤(RpT)k(f tg).
From the arbitrariness ofα, we get for eachk∈K,(RTp)k(f tg)≥(R p
T)k(f)∧(R p T)k(g). (RN4): For each g∈p| f andk∈K, we have
Tk(g)≤
^
p6vg
(RpT)k(g)≤(RpT)k(g)≤(RpT)k(f).
Therefore,(RpT)k(f) =
W
g∈p|f Tk(g)≤
W
g∈p|f
V
r6vg(RrT)k(g)≤(R p T)k(f). This means that for eachk∈K,(RpT)k(f) =
W
g∈p|f
V
r6vg(R r T)k(g).
(2) For the proof of the second claim of Lemma 1, it is sufficient to show the validity of the following equality;Tk(f) =Vp6vf(RpT)k(f)for all f ∈(LX)E andk∈K.
Obviously, Tk(f)≤V
p6vf(R p
T)k(f)for all f ∈(LX)E andk∈K. So it is enough to prove
Tk(f)≥
V
p6vf(R p
T)k(f). In fact, we have
^
p6vf
(RpT)k(f) = ^
p6vf
_
g∈p|f
Tk(g) =
_
A∈Πp6vfp|f
^
p6vf
Tk(A(p))≤
_
A∈Πp6vfp|f
Tk(up6vfA(p)) =Tk(f).
The last equality is due toup6vfA(p) = f for everyA∈Πp6vfp| f.
Lemma 2. LetR={Rp|p∈c((LX)E)}be a topological fuzzy soft remote neighborhood system andT :K→M(LX)E be defined by for all k∈K and f ∈(LX)E,
Tk(f) =
^
p6vf
Rpk(f).
Proof. By Definition 3, (C1) is trivial.
(C2) is proved by the following equations: for eachk∈K,
Tk(f tg) =
^
p6v(ftg)
Rpk(f tg)≥(^
p6vf
Rpk(f))∧(^
p6vg
Rpk(g)) =Tk(f)∧ Tk(g).
Finally, (C3) is shown by the following computation: for eachk∈K,
Tk(uj∈Jfj) =
^
p6vuj∈Jfj
Rpk(uj∈Jfj) =
^
j∈J
^
p6vfj
Rpk(uj∈Jfj)≥
^
j∈J
^
p6vfj
Rpk(fj) =
^
j∈J
Tk(fj).
This completes the proof.
Moreover, it is obvious that R = P if R andP are two topological fuzzy soft remote neighborhood systems which determine the same fuzzy soft cotopology.
Lemma 3. LetR ={Rp | p ∈c((LX)E)} be a set satisfying (RN1)-(RN3). Then the following statements are equivalent:
(RN4) Rpk(f) =Wg∈p|f Vr6vgRrk(g). (RN4*) Rpk(f) =Wg∈p|f(Rpk(g)∧V
r6vgRrk(f)).
Proof. Suppose (RN4*) holds, i.e.,Rpk(f) =Wg∈p|f(Rpk(g)∧V
r6vgR r
k(f)). Letα∈ c(M) such thatαÃRpk(f) =Wg∈p|f(Rpk(g)∧Vr6vgRrk(f)). Then there exists some g∈ p| f such
that
(1) αÃRpk(g);
(2) αÃRrk(f), for eachr6vg.
It is clear that the meet of fuzzy soft sets containing f and fulfilling (1) and (2) is still of such kind. So we can defineg∗to be the minimal fuzzy soft set containingf and fulfilling (1), (2), i.e.,αÃRpk(g∗)andαÃRrk(f)for allr6vg∗. Thus, for eachr6vg∗, it follows fromαÃRrk(f)
that there existshr∈r| f such that (3) Rrk(hr)Âα;
(4) Rrk(f)Âα, for eachg6vhr.
It is easy to check thatg∗ uhrsatisfies (1) and (2). Hence, by the minimality ofg∗, it follows that g∗ vg∗ uhr. Therefore, g∗ vhr. Then we get thatαÃRrk(hr)≤Rrk(g∗)for all r6v g∗.
Thus,α≤Vr6vg∗Rrk(g∗). Therefore,α≤Wg∈p|f Vr6vgRrk(g).
4. Fuzzy Soft Uniform Spaces
In this section, we introduce the concept of fuzzy soft uniformity as a parameterized family of Hutton uniformity in the spirit of fuzzy soft topology. Also, we consider the categorical relationship between the fuzzy soft remote neighborhood system and fuzzy soft uniform space.
LetH(X,E)denote the family of all mappingsλ:(LX)E→(LX)E such that: (1) f vλ(f)for all f ∈(LX)E.
(2) λ(F
j∈J fj) =
F
j∈Jλ(fj)for all{fj}j∈J⊆(LX)E.
λ∗ denotes the biggest element ofH(X,E), i.e., λ∗(f) =0
X when f = 0X and λ∗(f) =1X otherwise.
Forλ,µ∈ H(X,E), we have thatλ∆µ∈ H(X,E)andλ◦µ∈ H(X,E), where
λ∆µ(f) =u{λ(g)tµ(h)| f = gth}andλ◦µ(f) =λ(µ(f)). For eachλ∈ H(X,E), let λÃ(g) =u{h∈(LX)E|λ(h0)vg0}.
Proposition 2.
(i) λÃ∈ H(X,E). (ii) (λÃ)Ã=λ.
(iii) (λ◦µ)Ã=µÃ◦λÃ.
(iv) λ≤µimpliesλÃ≤µÃ.
(v) (λ∆µ)Ã=λÃ∆µÃ.
(vi) (Wi∈Γλi)Ã=W
i∈ΓλÃi .
(vii) Ifλ1≤λ2 andµ1≤µ2, thenλ1∆µ1≤λ2∆µ2.
Supposeϕψ:(LX)E→(LY)F be a fuzzy soft mapping andλ∈ H(Y,F), define ϕ⇐
ψ(λ):(LX)E→(LX)E byϕ⇐ψ(λ)(f) =ϕψ←◦λ◦ϕψ→(f)for all f ∈(LX)E.
Proposition 3.
(i) ϕψ⇐(λ)∈ H(X,E).
(ii) λ≤µimpliesϕ⇐ψ(λ)≤ϕψ⇐(µ). (iii) ϕψ⇐(λÃ) = (ϕ⇐
ψ(λ))Ã.
(iv) ϕψ⇐(λ◦µ)≤ϕψ⇐(λ)◦ϕψ⇐(µ).
Definition 5. An (L,M)-fuzzy (E,K)-soft quasi-uniformity is a mapping U : K → MH(X,E) which satisfies the following conditions: for each k∈K,
(U2) Uk(λ∆µ)≥ Uk(λ)∧ Uk(µ)for eachλ,µ∈ H(X,E). (U3) Ifλ≥µ, thenUk(λ)≥ Uk(µ).
(U4) Uk(λ)≤W{Uk(µ)|µ◦µ≤λ}for allλ∈ H(X,E).
The pair(X,U)is called an(L,M)-fuzzy(E,K)-soft quasi-uniform space. An(L,M)-fuzzy(E,K) -soft quasi-uniform space (X,U) is said to be an (L,M)-fuzzy (E,K)-soft uniform space if U
provides the condition:
(U) Uk(λ)≤
W
{Uk(µ)|µ≤λ/}for each k∈K,λ∈ H(X,E).
Given two U1 andU2 uniformities on X, we sayU1 is finer thanU2 (orU2 is coarser thanU1) iffUk1(λ)≥ Uk2(λ)for eachk∈Kandλ∈ H(X,E).
A fuzzy soft mappingϕψ,η:(X1,U1)→(X2,U2)is called (quasi-) uniformly continuous
if Uk1(ϕ⇐ψ(µ)) ≥ Uη2(k)(µ) for all µ ∈ H(X2,E2), k ∈ K1, where (X1,U1) and (X2,U2) is
an(L,M)-fuzzy (E1,K1)-soft uniform space and an(L,M)-fuzzy (E2,K2)-soft uniform space, respectively.
Theorem 1. Let(X1,U1),(X2,U2)and(X3,U3)be(L,M)-fuzzy(Ei,Ki)-soft uniform spaces,
respectively for i=1, 2, 3. Ifϕψ,η:(X1,U1)→(X2,U2)andϕ∗ψ∗,η∗ :(X2,U2)→(X3,U3)are uniformly continuous, then the composition is uniformly continuous.
The category of(L,M)-fuzzy(E,K)-soft quasi-uniform spaces and continuous mappings is denoted byHFSU(L,M).
Theorem 2. Let(X,U)be an(L,M)-fuzzy(E,K)-soft quasi-uniform space and RpU :K→M(LX)E be defined by for all f ∈(LX)E,
(RpU)k(f) =_
p6vh
_
λ(h0)vf0
Uk(λ).
ThenRU ={R p
U |p∈c((L X)E)
}is a topological fuzzy soft remote neighborhood system.
Proof. We need to check (RN1)-(RN4). (RN1), (RN2) and (RN3) are straightforward, what remains is to prove.
(RN4): From Lemma 3, we know that it is equivalent to check (RN4*). Since
(RpU)k(f)≥Wg∈p|f (RpU)k(g)∧Vr6vg(RrU)k(f), for allk∈K, is obvious. It is sufficient to show that(RpU)k(f)≤W
g∈p|f
(RpU)k(g)∧V
r6vg(RrU)k(f)
, for each
k∈K. Letk∈K andα∈c(M)such thatαÃ(RpU)k(f), that is, αÃ(RpU)k(f) =
_
p6vh
_
λ(h0)vf0
Uk(λ)≤
_
p6vh
_
λ(h0)vf0
_
µ◦µ≤λ
Uk(µ).
Then there existh∈(LX)E,λ∈ H(X,E)andµ∈ H(X,E)such that
andα≤ Uk(µ).
Let g= (µ(h0))0. Then g∈p| f. Furthermore, we have
(RpU)k(g) = _
p6vd
_
ν(d0)vg0
Uk(ν)≥
_
ν(h0)vg0
Uk(ν)≥ Uk(µ)≥α
and
^
r6vg
(RUr )k(f) = ^
r6vg
_
r6vd
_
ν(d0)vf0
Uk(ν)≥
^
r6vg
_
ν(g0)vf0
Uk(ν)≥
^
r6vg
Uk(µ)≥α.
Thenα≤(RpU)k(g)∧Vr6vg(RUr )k(f). Therefore,α≤Wg∈p|f (RUp )k(g)∧Vr6vg(RrU)k(f). From the arbitrariness of α, we have (RUp)k(f) ≤
W
g∈p|f
(RpU)k(g)∧V
r6vg(RrU)k(f)
.
Theorem 3. Let(X,U)be an(L,M)-fuzzy(E,K)-soft quasi-uniform space. Then,RUp can also be written as follows:
(i) (RUp)k(f) =Wp6vhWλ◦λ(h0)vf0Uk(λ).
(ii) (RUp)k(f) =
W
h∈(LX)E
W
p6vλ(h0)w(λ◦λ(h0))0wf Uk(λ).
(iii) (RUp)k(f) =
W
p6vλ/(f)Uk(λ).
Proof. (i) and (ii) are trivial. (iii) can be obtained by the definition ofλ/.
From Lemma 2, we know thatTU is an(L,M)-fuzzy(E,K)-soft cotopology onX and call it the generated(L,M)-fuzzy(E,K)-soft cotopology byU.
Theorem 4. Let (X,T) be an(L,M)-fuzzy(E,K)-soft cotopological space. Then there is one
(L,M)-fuzzy(E,K)-soft quasi uniformityUT on X such that the generated(L,M)-fuzzy(E,K) -soft cotopology byUT is justT, i.e.,T =TUT. This is to say that each(L,M)-fuzzy(E,K)-soft cotopological space is(L,M)-fuzzy(E,K)-soft quasi-uniformizable.
Proof. Let g∈(LX)E andλg:(LX)E →(LX)E be defined as follows:
λg(f) =
1X, if f 6vg;
g, if 0X 6= f v g; 0X, otherwise.
Thenλf ∈ H(X,E)andλf ◦λf =λf. DefineUT :K→MH(X,E)by
(UT)k(λ) =
_ {
n
^
i=1
Tk(gi)|λ≥∆in=1λg0i,n∈N}.
It is easy to verify thatUT is an(L,M)-fuzzy (E,K)-soft quasi uniformity on X. Now we prove thatT =TUT. Noting thatλ
/
g0
i(
f) = f, from the definition ofTUT, we have fork∈K
(TUT)k(f) =
^
p6vf
_
p6vλ/(f)
_ {
n
^
i=1
Tk(gi)|λ≥∆in=1λg0i,n∈N} ≥
^
p6vf
This is to sayTUT ≥ T. On the other hand, we have
(TUT)k(f) =
^
p6vf
_
p6vλ/(f)
_ {
n
^
i=1
Tk(gi)|λ≥∆in=1λg0i,n∈N}
≤^
p6vf
_
p6vλ/(f)
_ {
n
^
i=1
Tk(gi)|λ/≥∆in=1λ/gi0,n∈N}
≤^
p6vf
_
p6vλ/(f)
_ {
n
^
i=1
Tk(gi)|λ/(f)≥∆ni=1λg0i(f),n∈N}
≤^
p6vf
_
{Tk(umj=1gj)|p6v umj=1gjw f,m∈N}
≤^
p6vf
_
{Tk(g)|p6vgw f}=Tk(f).
This completes the proof.
Theorem 5. Ifϕψ,η:(X1,U1)→(X2,U2)is quasi uniformly continuous, then
ϕψ,η:(X1,TU1)→(X2,TU2)is fuzzy soft continuous. Proof. Let g∈(LX2)E2,k∈K
1 andαÃ(TU2)η(k)(g). Sinceϕψ,η:(X1,U1)→(X2,U2)is
quasi uniformly continuous, we haveUk1(ϕ⇐ψ(µ))≥ Uη2(k)(µ)for allµ∈ H(X2,E2), k∈K1.
Hence,
αÃ(TU2)η(k)(g) =
^
p6vg
_
p6vλ/(g)
Uη2(k)(λ)≤ ^
p6vg
_
p6vλ/(g)
Uk1(ϕ⇐
ψ(λ)).
Noting that ϕψ→(h)6v g whenh6v ϕψ←(g), we can find someλ(h) ∈ H(X2,E2)such that
ϕ→
ψ(h)6v λ(h)(g)andα ≤ Uk1(ϕψ⇐(λ(h))). Now letν(h)=ϕ⇐ψ(λ(h)). Thenν(h)∈ H(X1,E1)
andh6vν/(h)(ϕ←
ψ(g)). Hence,
α≤ ^
h6vϕ← ψ(g)
Uk1(ν(h))≤
^
h6vϕ← ψ(g)
_
h6vν/(ϕ← ψ(g))
Uk1(ν) = (TU1)k(ϕ←ψ(g)).
Therefore,(TU2)η(k)(g)≤(TU1)k(ϕ←ψ(g))from the arbitrariness ofα. So,
ϕψ,η:(X1,TU1)→(X2,TU2)is fuzzy soft continuous.
Theorem 6. Ifϕψ,η:(X1,T1)→(X2,T2)is fuzzy soft continuous, then
ϕψ,η:(X1,UT1)→(X2,UT2)is quasi uniformly continuous.
Proof. Letϕψ,η:(X1,T1)→(X2,T2)be continuous. From the definition ofUT1, we know
that for each k ∈K, (UT2)η(k)(λ) =
W {Vn
i=1Tη2(k)(gi)| λ≥ ∆ n
i=1λg0i, n∈N}. Moreover, if λ≥∆ni=1λg0i, then we have
ϕ⇐
ψ(λ)≥ϕψ⇐(∆ni=1λg0i) = n
^
i=1
(ϕ⇐
ψ(λ(g0i))) = n
^
i=1 λϕ←
Sinceϕψ,η:(X1,T1)→(X2,T2)is continuous, we haveVni=1Tη2(k)(gi)≤Vni=1Tk1(ϕψ←(gi)). Hence,(UT2)η(k)(λ)≥(UT1)k(ϕ⇐ψ(λ)).
Therefore,ϕψ,η:(X1,UT1)→(X2,UT2)is quasi uniformly continuous.
Theorem 7. Let G:FSCTOP(L,M)→HFSU(L,M)be defined by G((X,T)) = (X,UT). Then G is an embedding functor fromFSCTOP(L,M)toHFSU(L,M).
5. Category of Fuzzy Soft Uniform Spaces
In this section, we will show that the category HFSU(L,M) of (L,M)-fuzzy (E,K)-soft uniform spaces and continuous functions is a topological category overSET3.
Theorem 8. Let{(Xi,Ui)}
i∈Γbe a family of(L,M)-fuzzy(Ei,Ki)-soft uniform spaces, X be a
set, E,K be the parameter sets and for each i∈Γ,ϕi :X→Xi,ψi :E→Ei andηi :K→Ki be a function. We define the mappingU :K→MH(X,E)by:
Uk(λ) =
_ {
n
^
j=1
Uij
ηi j(k)(λij)|∆ n
j=1(ϕψ)⇐ij (λij)≤λ}, for each k∈K,
where∨is taken over the finite index set{i1, . . . ,in} ⊆Γ. Then the following items are satisfied.
(1) U is the coarsest(L,M)-fuzzy(E,K)-soft uniformity on X for which each(ϕψ,η)iis uniformly
continuous function.
(2) A functionϕψ,η:(Z,V)→(X,U)is uniformly continuous iff
(ϕψ,η)i◦ϕψ,η:(Z,V)→(Xi,Ui)is uniformly continuous for all i∈Γ.
Proof. (1) Firstly, we will prove thatU is an(L,M)-fuzzy(E,K)-soft uniformity onX. (U1) and (U3) are clear.
(U2): Suppose there existλ,µ∈ H(X,E)andk∈Ks.t. Uk(λ∆µ)6≥ Uk(λ)∧ Uk(µ). By the definition of U, there exist finite index sets{i1, . . . ,in},{j1, . . . ,jm} ⊆Γsuch that
Uk(λ∆µ)6≥
Vn
r=1U ir
ηir(k)(λir)
∧
Vm
s=1U js
ηjs(k)(µjs)
where∆nr=1(ϕψ)⇐i
r (λir)≤λand
∆m
s=1(ϕψ)⇐js(µjs)≤µ. Since(∆n
r=1(ϕψ)⇐ir (λir))∆(∆ m
s=1(ϕψ)⇐js(µjs))≤λ∆µ. By Proposition 2 (vii), we have
Uk(λ∆µ)≥
Vn
r=1U ir
ηir(k)(λir)
∧
Vm
s=1U js
ηjs(k)(µjs)
.
This is a contradiction. Hence for eachk∈Kandλ,µ∈ H(X,E), we obtain
Uk(λ∆µ)≥ Uk(λ)∧ Uk(µ).
(U4): Suppose there existk∈Kandλ∈ H(X,E)such that
Uk(λ)6≤
W
{Uk(µ)|µ◦µ≤λ}.
By the definition of Uk(λ), there exists a finite index set J = {i1, . . . ,in} ⊆ Γ such that
Vn
j=1U ij
ηi j(k)(λij)6≤
W
{Uk(µ)|µ◦µ≤λ}, where∆nj=1(ϕψ)⇐ij (λij)≤λ. Since(Xij,U
(L,M)-fuzzy(Ei
j,Kij)-soft uniformity for eachij∈ {i1, . . . ,in}, by Definition 5,
Uij
ηi j(k)(λij)≤
W {Uij
ηi j(k)(ν)|ν◦ν≤λij}.
For each ij ∈ {i1, . . . ,in}, there exists νij ∈ H(Xij,Eij) with νij ◦νij ≤ λij such that
Vn
j=1U ij
ηi j(k)(νij)6≤
W
{Uk(µ)| µ◦µ≤ λ}. Putν∗ = ∆nj=1(ϕψ)⇐ij (νij). For each ij ∈J, we haveν∗◦ν∗= (∆n
j=1(ϕψ)i⇐j (νij))◦(∆ n
j=1(ϕψ)⇐ij (νij)). Hence, ν∗◦ν∗≤∆n
j=1((ϕψ)⇐ij(νij)◦(ϕψ) ⇐
ij (νij))≤∆ n
j=1((ϕψ)⇐ij (νij◦νij))≤∆ n
j=1(ϕψ)⇐ij(λij)≤λ. Then we haveν∗◦ν∗≤λandU
k(ν∗)≥
Vn j=1U
ij
ηi j(k)(νij). This is a contradiction.
(U4): Let{(Xi,Ui)}i∈Γbe a family of (L,M)-fuzzy(Ei,Ki)-soft uniform spaces. Suppose there exists λ∈ H(X,E) andk ∈K such that Uk(λ) 6≤
W
{Uk(µ) | µ ≤ λ/}. By using the definition ofUk(λ), there exists a finite index setJ = {j1, . . . ,jn}ofΓsuch thatW{Uk(µ)| µ≤λ/} 6≥Vn
i=1U ji
ηji(k)(λji), where∆ n
i=1(ϕψ)⇐ji (λji)≤λ. SinceUji is an(L,M)-fuzzy(E
ji,Kji)-soft uniformity onXji, then
W {Uji
ηji(k)(ν) | ν ≤ λ
/
ji} ≥ U ji
ηji(k)(λji). For each ji ∈ J, there exists ν ∗
ji ∈ H(Xji,Eji) with ν∗
ji ≤λ
/
ji such that
W
{Uk(µ)|µ≤λ/} 6≥
Vn i=1U
ji
ηji(k)(ν∗ji). On the other hand, we have
∆n
i=1(ϕψ)⇐ji (ν ∗
ji)≤∆ n
i=1(ϕψ)⇐ji (λ
/
ji) = ∆ n
i=1((ϕψ)⇐ji (λji))
/= (∆n
i=1(ϕψ)⇐ji (λji))
/≤λ/.
Putν∗= ∆ni=1(ϕψ)⇐j i (ν
∗
ji). Then there existsν
∗∈ H(X,E)such thatν∗≤λ/and
Uk(ν∗)≥
Vn
i=1U ji
ηji(k)(ν ∗
ji). Thus n
^
i=1
Uji
ηji(k)(ν ∗
ji)≤ Uk(ν
∗)≤_
{Uk(µ)|µ≤λ/}.
This is a contradiction. Hence for eachk∈K andλ∈ H(X,E), we haveUk(λ)≤W
{Uk(µ)| µ≤λ/}.
Secondly by using the definition of U, we have Uk((ϕψ)⇐i (λi)) ≥ Uηii(k)(λi) for each
k∈K,i∈Γandλi∈ H(Xi,Ei). Hence(ϕψ,η)i is uniformly continuous function. Finally, if(ϕψ,η)i :(X,V)→(Xi,Ui)is uniformly continuous, i.e.,
Vk((ϕψ)⇐i (λi)) ≥ Uηi
i(k)(λi) for each k ∈ K,i∈Γ andλi ∈ H(Xi,Ei). Then for k∈ K, we have
Uk(f) =
_ {
n
^
j=1
Uij
ηi j(k)(λij)|∆ n
j=1(ϕψ)⇐ij(λij)≤λ}
≤_{
n
^
j=1
Vk((ϕψ)⇐ij (λij))|∆ n
j=1(ϕψ)⇐ij (λij)≤λ}
≤_{Vk(∆nj=1(ϕψ)⇐ij(λij))|∆ n
(2) Necessity of the composition condition is clear. Suppose that for(L,M)-fuzzy(E∗,K∗)
-soft uniform space(Z,V), ϕψ,η:(Z,V)→(X,U)is not uniformly continuous. Then there existk∗∈K∗andλ∈ H(X,E)such thatVk∗((ϕψ)⇐(λ))6≥ Uη(k∗)(λ). By the definition ofU,
there exists a finite index setJ={j1, . . . ,jn}ofΓsuch thatVk∗((ϕψ)⇐(λ))6≥
Vn i=1U
ji
ηji(η(k∗))(λji), where∆ni=1(ϕψ)⇐j
i (λji)≤λ.
On the other hand, since(ϕψ,η)j
i ◦ϕψ,ηis uniformly continuous, we have n
^
i=1
Uji
ηji(η(k∗))(λji)≤ n
^
i=1
Vk∗(ϕψ⇐,η◦(ϕψ,η)⇐j
i (λji))
≤Vk∗(∆ni=1ϕ⇐ψ,η((ϕψ,η)⇐ji (λji)))
=Vk∗(ϕψ⇐,η(∆ni=1(ϕψ,η)⇐ji (λji)))
≤Vk∗(ϕψ⇐,η(λ)).
This is a contradiction.
Definition 6. Let{(Xi,Ui)}i∈Γ be a family of (L,M)-fuzzy(Ei,Ki)-soft uniform spaces, X be a set, E,K be the parameter sets and ϕi : X → Xi, ψi : E → Ei and ηi : K → Ki be
func-tions for each i∈Γ. The initial (L,M)-fuzzy(E,K)-soft uniform structure on X with respect to
(X,(ϕψ,η)i,(Xi,Ui),Γ)is the coarsest(L,M)-fuzzy(E,K)-soft uniform structure on X for which all i∈Γ,(ϕψ,η)i are uniformly continuous.
From Theorem 8 and Definition 6, we have the following theorem:
Theorem 9. The categoryHFSU(L,M)of(L,M)-fuzzy(E,K)-soft uniform spaces and uniformly continuous functions is a topological category over the category SET3 with respect to the usual forgetful functor V :HFSU(L,M)→SET3 which is defined by V(X,U) = (X,E,K)and
V(ϕψ,η) = (ϕ,ψ,η).
Definition 7. Let X= Πi∈ΓXi, E= Πi∈ΓEiand K= Πi∈ΓKibe the product sets and{(Xi,Ui)}i∈Γ be a family of(L,M)-fuzzy(Ei,Ki)-soft uniform spaces, for each i∈Γ. The initial(L,M)-fuzzy
(E,K)-soft uniformity structureU on X with respect to the family{(pq,r)i:X →(Xi,Ui)}i∈Γof all projection functions is called the product of(L,M)-fuzzy(Ei,Ki)-soft uniformity{Ui}
i∈Γ. The pair(X,U)is called the product(L,M)-fuzzy(E,K)-soft uniform space.
6. Conclusion
References
[1] B. Ahmad and A. Kharal.On fuzzy soft sets, Advances in Fuzzy Systems, Article ID 586507, 2009.
[2] H. Akta¸s and N. Çaˇgman.Soft sets and soft groups, Information Sciences, 177(13), 2726-2735. 2007.
[3] A. Aygünoˇglu and H. Aygün.Introduction to fuzzy soft groups, Computers and Mathemat-ics with Applications, 58, 1279-1286. 2009.
[4] A. Aygünoˇglu, V. Çetkin, and H. Aygün.An Introduction to fuzzy soft topological spaces, Hacettepe Journal of Mathematics and Statistics, 43(2), 197-208. 2014.
[5] G. Gierz, K. H. Hofmann, K. Keimel, J. D. Lawson, M. Mislove and D. S. Scott. A com-pendium of continuous lattices, Springer, Berlin, Heidelberg, New York, 1980.
[6] U. Höhle.Probabilistic topologies induced by L-fuzzy uniformities, Manuscripta Mathemat-ica, 38(3), 289-323. 1982.
[7] B. Hutton.Uniformities on fuzzy topological spaces, Journal of Mathematical Analysis and Applications, 58, 559-571. 1977.
[8] Y. B. Jun.Soft BCK/BCI algebras, Computers and Mathematics with Applications, 56(5), 1408-1413. 2008.
[9] A. Kharal and B. Ahmad. Mappings on fuzzy soft classes, Advances in Fuzzy Systems, Article ID 407890, 2009.
[10] R. Lowen. Fuzzy uniform spaces, Journal of Mathematical Analysis and Applications, 82(2), 370-385. 1981.
[11] P.K. Maji, R. Biswas, and A.R. Roy.Fuzzy soft sets, Journal of Fuzzy Mathematics, 9(3), 589-602. 2001.
[12] D. Molodtsov.Soft set theory-First results, Computers and Mathematics with Applications, 37(4/5), 19-31. 1999.
[13] A.R. Roy and P.K. Maji. A fuzzy soft set theoretic approach to decision making problems, Journal of Computational and Applied Mathematics, 203, 412-418. 2007.
[14] F. G. Shi.Pointwise uniformities in fuzzy set theory, Fuzzy Sets and Systems, 98(1), 141-146. 1998.
[15] F. G. Shi, J. Zhang, and C. Y. Zheng. proximities and totally bounded pointwise L-uniformities, Fuzzy Sets and Systems, 133(3), 321-331. 2003.
[17] B. Tanay and M. B. Kandemir. Topological structures of fuzzy soft sets, Computers and Mathematics with Applications, 61, 412-418. 2011.