INTELLIGENT BIPED ROBOT
SANDEEP BALBHIMRAO PAWAR
Vidya Pratishthan’s College of Engineering Baramati, Pune University, Vidyanagri Bhigwan Road Baramati, Pune, 413133, India
Balasaheb Deokate
Vidya Pratishthan’s College of Engineering Baramati, Pune University, Vidyanagri Bhigwan Road Baramati, Pune, 413133, India
Abstract:
In this paper we show that the intelligent biped robot to improving energy efficiency of a active robot or Making passive robot to do complex maneuvers.
Keywords: Ground Reaction Force control (GRFC); Landing Position Control (LPC); Zero Moment Point (ZMP).
1. Introduction
The need of robot to assist human activities in daily environment, such as office, home and hospital, is growing rapidly. Such robot must communicate with humans and accomplish tasks in the human’s daily environment. Our daily environments are constructed so as to accommodate human bodies. There for, a humanoid with the anthropoid shape (two arm and two legs) is a unequally appropriate form.
In general, a bipedal locomotion system consists of several members are interconnected with actuated joints. In essence, a man-made walking robot is nothing more than a robotic manipulator with a detachable and moving base. Design of bipedal robots has been largely induced by the most sophisticated and versatile biped known to man, the man himself.
Therefore, most of the models/machines developed bear a strong resemblance to the human body. Almost an -y model or machine can be characterized as having two lower limbs that are connected through a central member. Although the complexity of the system depends on the number of degrees of freedom, the existence of feet structures, upper limbs, etc., it is widely known that even extremely simple unnatural systems can generate ambulatory motion.
A bipedal locomotion system can have a very simple structure with three point masses connected with mass less links or very complex structure that mimics the hum- and body. Foot–ground impact remains one of the main difficulties one has to face in the design of robust control laws for walking robots.
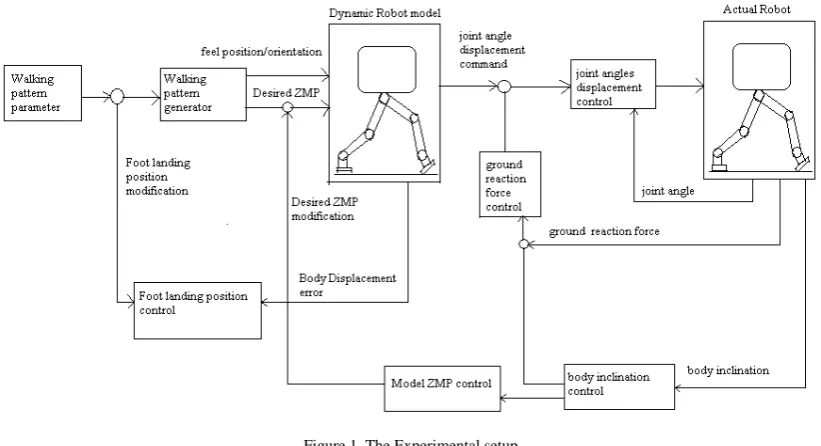
2. Experimental Set up
Figure 1. The Experimental setup
To avoid tipping over, a walking or standing human will first push down hard on the ground with a part of the sole of the foot. Then, when the tipping force can no longer be resisted, a change in the body position may be required to recover the correct, or balanced, posture.
The combination of the ideal walking pattern's inertia force and gravity force is called the 'desired total inertia force'. The point on the ground at which the moment of the desired total inertia force becomes zero, is called the 'Desired Zero Moment Point' or 'Desired ZMP'.
A ground reaction force acts on both feet of the robot. The combination of these forces is referred to as the 'Actual Total Ground Reaction Force'. The point on the ground where the moment of the Actual Total Ground Reaction Force becomes zero is called the 'Center of Actual Total Ground Reaction Force'. If the robot is walking in ideal conditions, the desired ZMP and the Center of Actual Total Ground Reaction Force will be at the same point. In reality, however, terrain is often irregular. In this case, the line of action of the and Actual Total Ground Reaction Force that of the desired total inertia force separate. As a result, the force couple prod-used, referred to as the 'tipping moment', acts on the robot, and its posture will tend to rotate. The control to operate C-ATGRF is called 'Ground Reaction Force control’.
If the body position of the model changes in conjunction with the Model ZMP, the spatial configuration of the body and feet will differ from the ideal state. In order to gradually bring this back to the ideal state, the landing position of the feet is changed. This is called 'Landing Position Control'.
3. Torque Simulation Result
Simulation Procedure:
Step 1: The Model of robot was realized on Solid works. Step 2: Each link was exported as a .wrl file
Step 3: The links were reassembled in a VRML world.
Step 4: The world was dynamically animated using MATLAB.
3.1 Simulation Results:
The whole walking phenomena can be divided into many phases.
Phase I: This is a double limb support phase. Motor 1 and motor 12 are used to move the Centre of mass of biped above the supporting leg.
Phase II: Single Limb support phase. Active leg is swung in this phase. Motor 8 is used to Swing the active leg. Motor 1 and motor 2 handle the balancing.
Phase III: Ground Active leg. This is again single limb support phase
Phase IV and Phase V: Change Active Leg. This is Double limb Support phase. The weight is shifted from the one leg to the other.
Phase VI: Lift New Active Leg. This is Single Limb Support phase.
Phase VII: Swing Active New Leg. The MATLAB code of simulation can be found in the Appendix
.
Figure 3. Double balance
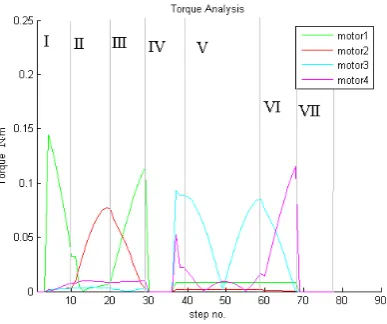
3.1.2 Torque Simulation Results
Figure 4. Torque simulation result.
Phase I: Lifting Active Leg Phase II: Swinging Active Leg Phase III: Grounding Active Leg
Phase IV: Changing Active Leg(Double Limb Support Phase) and Lifting New Active leg Phase V: Swinging New Active leg
Phase VI: Grounding Active Leg Phase VII: Double Leg Support Phase
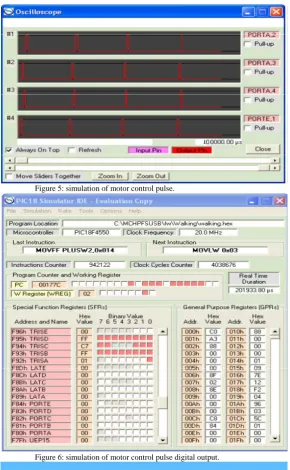
3.1.3 Motor Control Pulse Simulation (On a third party simulator)
Figure 5: simulation of motor control pulse.
Figure 6: simulation of motor control pulse digital output.
4. Conclusion
This experiment provides experimental verification that the use of a Intelligent biped robot can increases energy efficiency up to 30% of conventional biped robot.
References
[1] Mitobe K.; Capi G. ; Nasu Y.( 2004) :A new control method for walking robots based on angular momentum. Mechatronics, vol. 14, pp. 163–174.
[2] Silva, F.M.; Machado, J.A.T (1998): Towards Efficient Biped Robots. IEEE, vol.1, pp. 394 – 399.
[3] Hardt M.; Kreutz K. –Delgado & Helton J. and Stryk O.V.: Obtaining minimum energy biped walking gaits with symbolic models and numerical optimal control. Workshop – Biomechanics Meets Robotics, Modelling and Simulation of Motion, HeidelBerg, Germany, pp. 1–19, 1999.
[4] Jin’ichiYamaguchi;Soga E., Inoue Sadatoshiand Takanishi Atsuo(1999): Development of a Bipedal Humanoid Robot- Control Method of Whole Body Cooperative Dynamic Biped Walking. IEEE, pp. 368-374.