1551
A Fuzzy Based Trust And Priority Enabled AODV
Routing Scheme For Vehicular Network
C. Suganthi Evangeline, Vinoth Babu KumaraveluAbstract: Vehicular adhoc network (VANET) is the collection of vehicles which can communicate with each other and also with infrastructure. It is based on the standard IEEE 802.11p. With the development of Intelligent Transportation System (ITS), VANET is used to provide safety information in case of any collision, traffic congestion or accidents. To enable the efficient data dissemination method, many routing protocols are employed in VANET scenario. To find the appropriate route in VANET for sending messages is the challenging task due to frequent change in mobility pattern. In order to provide stability in route construction and to allocate priority for the emergency packets, fuzzy approach is employed in Adhoc On Demand Vector routing (AODV). The proposed Fuzzy based Trust and Priority Adhoc On demand Vector (FT-P-AODV) routing protocol is employed to the real time traffic generated using SUMO 0.25.0. The proposed work has been compared with conventional method and provides considerable improvement in the performance metrics such as end to end delay, throughput and packet delivery ratio (PDR). All simulations to support the performance are carried out using Network Simulator NS-2.35.
Index Terms— Ad hoc On Demand Vector routing (AODV), Data dissemination, Route Stability, Intelligent Transportation System (ITS), IEEE 802.11p
————————————————————
1 INTRODUCTION
VANET is a special kind of Mobile Ad hoc Networks (MANET) in which vehicles on road forms nodes of networks *1+. VANET is created by applying the principles of MANET. The vehicles obtain services from VANET like traffic monitoring, speed controlling, locating lost vehicle and environmental monitoring as it covers more regions etc. Communications in VANET are of three types, Vehicle to Vehicle (V2V), Vehicle to Infrastructure (V2I) and hybrid type. The vehicles moving on road can communicate with other vehicles is called pure V2V Communication. It does not rely on fixed infrastructure and it is mainly employed for safety, security and message dissemination services. The moving vehicles can communicate with road side unit (RSU) is called V2I Communication *2+. The main advantage for this type of communication is to access internet services. The hybrid type of communication involves both V2V and V2I. It can get connected with RSU either by single hop or multi hop fashion. In some cases they form as clusters with other vehicles to communicate among clusters or between two clusters *3+. In all scenarios many routing protocols are proposed to find their route to destination. The main aim of V2V communication is to enable the vehicles to transfer safety messages and send their own speed, direction, and position information to other vehicles. The driver can receive warning messages depending upon the communication technology used in the on board unit (OBU) of the vehicle *4+. The high dynamic nature along with varying mobility patterns and frequent topology changes in VANET paves the way to reformulate the issue of routing the messages in V2V communication. AODV is a routing protocol
designed for MANET and VANET. The route between source and destination vehicle is created as per the request of the source vehicle. AODV follows three important phases in routing of data,
i) Route Discovery phase ii) Route Establishment phase iii) Route Maintenance phase
In conventional AODV approach the best route towards the destination is calculated using hop count. The minimum value of hop count is taken as the option to build the path *5+. It does not consider other factors that may have effect on the quality of route, such as the received signal strength (RSS), mobility of nodes (vehicles) and residual energy of nodes. In vehicular communication the dissemination of safety messages are of two categories, i) Beacon messages ii) event driven safety messages. Beacon type message dissemination is unavoidable since it consists of vehicle’s geographical location, speed and direction of the vehicle. The event driven messages are resulting due to some unexpected event like accidents, crash, lane changing etc. This type of messages should undergo the process of dissemination with utmost less delay and with high priority. The messages are sent through control channel (CCH) in VANET *6+. In high traffic environment, the beacon messages are sent at high frequency so it will ultimately results in congested CCH, which will eventually degrade the network performance and increase the delay. To overcome all the shortcomings of implementing an on-demand routing protocol in VANET context, we propose a protocol for two network conditions, which is to construct trust based route and to prioritize safety messages. In the first phase of the proposed work, the fuzzy techniques are incorporated into conventional AODV routing protocol to build a trust based stable route. The inputs considered for fuzzy inference engine (FIE) are received signal strength, distance between vehicles and vehicle speed. They result in a trust value which is used to construct a reliable route and minimize the probability of route failure during data packet transmission. In the second
————————————————
C. Suganthi Evangeline is currently pursuing research degree program in School of Communication Engineering in Vellore institute of Technology and Working as Assistant Professor in Karunya Institute of Technology and Sciences, India, E-mail: [email protected]
phase of proposed work, the congested scenario is considered, the priority of the messages is evaluated and that message is traversed first in the route constructed based on trust which will ultimately result in message delivery rate to be higher and reduce latency.
2 RELATED WORKS
Routing protocol enables the two communication entity to exchange the information. It follows three main steps before sending the real payload data. It includes establishing a route, forwarding and maintaining. There are three categories of VANET routing protocols *7+.The topology based routing protocols includes both proactive and reactive type. The table-driven or proactive protocol used in VANET is Fisheye State Routing (FSR) *8+ .The reactive on demand protocols suitable for vehicular communication are AODV *9+, Temporally Ordered Routing Algorithm (TORA) *10+ and Dynamic Source Routing (DSR) *11+. The geographic routing protocols suitable for VANET are non-Disruption Tolerant Networking *12+,
Disruption Tolerant Networking (DTN) *13+ and hybrid type *14+.
The author in *15+ proposed an improved multicast AODV protocol for vehicular networks. In *16+ the authors discussed about an improved on demand multipath distance vector with speed as a metric S-Ad-hoc On-demand Multipath Distance Vector (AOMDV) which outperforms conventional AODV in hop count and other simulation results. The paper *17+ provides for an AODV with priority scheme suitable for multi hop Ad hoc networks, which incorporates artificial bee colony algorithm to calculate the contention window of the nodes. The authors in *18+ provide insights on new Particle Swarm Optimization (PSO) based routing protocols employed to take decisions of scheduling and thereby reducing the packet loss.
The authors in *9+ have analyzed an improvised AODV version of protocols used for VANETs. Optimization is carried out in route discovery and route selection process in order to decrease routing overhead and increase the routing performance. In *19+ a detailed analysis on fuzzy based time out depending upon the routing conditions and status of intermediate nodes is done. In *20+ findings are based on a
proposed a priority aware mechanism for Quality of Service (QoS) enhancement in MANET using DSR protocol. The on demand protocol will use single route towards destination. It won’t consider multiple alternate routes. In *21+ the authors presented the concept of backup routing (BR) in adhoc networks by employing mesh topology to provide multiple alternate routes to destination. The protocol was embedded in AODV and termed as AODV-BR for adhoc networks. The paper *22+ has comparative study on AODV, DSR, and Destination-Sequenced Distance-Vector Routing (DSDV) for urban environments in VANET.
The authors in *23+ have proposed an algorithm to
find optimal path using AODV by analyzing the route with high data rate and high security level. The alternate route is selected for backup in case of route failure. The authors in *5+ have discussed about fuzzy based AODV protocol to improve route stability. In paper *24+ a detailed analysis on AODV routing algorithm for MANET is mentioned. Different routing metrics such as length of Queue, residue node battery and signal strength are given as fuzzy inputs to select the route with minimum cost. In *25+ the authors proposed an energy aware routing algorithm with link stability. This algorithm considers the tradeoff between the stability of route and hop count to choose the best route. In *26+ the authors have done work on estimating trust on AODV for providing optimized routing in MANET. In this work trust is built based upon the energy, signal strength, time factor and packet ratio in order to overcome attacks in MANET. In paper *27+,a solution for upgrading routing feature in VANET by integrating a parameter called optimum value derived by performing Ant colony optimization (ACO) is provided. The movements of vehicles are considered in the route discovery process. In paper *28+ modified the existing AODV with the feature of new route discovery and selection and implemented for urban traffic and termed it as Urban-AODV. The authors of *29+ researched on fuzzy logic approach on routing protocol and proposed an improved version of AODV called as HS-AODV which outperforms the conventional one. In *30+ the authors have proposed a fuzzy based M-AODV for finding optimal path by considering remaining energy, delay and hop count.
3 CONVENTIONAL AODV PROTOCOL
Both multicast and unicast routing are supported by AODV. The protocol is designed in such a way that it undergoes three stages in route establishment. The process of conventional approach is depicted in Fig.1. In first stage, the source node starts the route discovery phase, whenever it has data packets to be sent. It floods the route request (RREQ) to all the neighbors within its transmission range. Each vehicle within the range receive RREQ, if itself is the destination or has a fresh route to the destination, reply with route reply (RREP) in unicast manner. The reply which comes with minimum hop count is considered to be the best route regardless of the nature of the node or any other parameter. In case of route failure, route error (RERR) message is passed back to the source node. The source vehicle on receiving the RERR finds another route to reach the destination via route discovery process *31+.
1553
throughput performance. If a link is in congestion, it can’t carry all control and data packets rather if priority is allotted; only higher priority packets are allowed to flow into the congestion link thereby eliminating the least priority packets.
Fig. 1 Conventional AODV in VANET
4 PROPOSED WORK
The proposed algorithm is designed for two network conditions. In condition 1, the traffic is in nominal rate without congestion. The trust value of the node is calculated using fuzzy. The inputs given to FIE are vehicle signal strength, vehicle speed and distance between the vehicles. In condition 2, there exists a congestion which ultimately leads to packet loss. In this scenario, the incoming packets are processed and checked for priority status. It then allows the packet with high priority to flow towards the trusted route and less priority packets are retained from using the resources such as queue and bandwidth. In vehicular context, the safety messages are given higher priority are allowed to reach the destination thereby limiting the lower priority messages.
4.1 Algorithms for Network condition 1 (i) Algorithm for route discovery process Input: Vehicles are in range of source vehicle
Ouput: Find Appropriate Route
Steps:
1.
Vehicle has data packet2.
send (RREQ)3.
if (neighbor vehicle != destination vehicle)4.
receive RREQ5.
update table and rebroadcast RREQ6.
else if (neighbor = destination)7.
execute algorithm 2 to find the trust value8.
Appropriate route is selected based on fuzzy based trust approach.(ii) Algorithm for calculating trust value of the node (Vehicle)
Input: Received signal strength, distance between vehicles, vehicle speed.
Output: Trust value of the node (low, medium, high)
Steps:
1.
For i=1:N2.
calculate RSS of the vehicle, distance between the vehicles, speed of the vehicle3.
determine trust using FIE.4.
if trust >0.55.
then send route reply.6.
else7.
find alternate route8.
endIn algorithm (i), the assumption was made like all vehicles are in range with source vehicle. If a source vehicle has some information to send to its destination vehicle, it first sends RREQ to all its neighbors. If the neighbor is the destination it will reply with RREP packet by executing algorithm (ii) by calculating the stable route using fuzzy, else it will update the routing table and forward the request. Hence by the combination of two algorithms, the stable route is established for VANET communication. The FIE has taken RSS, vehicle speed and distance between vehicles for evaluating the trust.
4.2 Fuzzy based trust computation
In our proposed work, trust of the route is calculated using fuzzy approach by analyzing the three inputs of FIE such as RSS of the vehicle, speed of the vehicle and distance between the vehicles as shown in Fig.2. The vehicle with high trust value is considered to have stable route to the destination vehicle. Each intermediate vehicle present between the source and destination vehicle will indulge in the process of calculating the trust whenever it receives RREQ packet. If intermediate vehicle receives more RREQ packet within the time duration, it selects the vehicle with high trust value and is followed by modifying the routing table. The specifications considered to calculate trust is mentioned in Table 1.
Fig. 2 FIE for proposed method
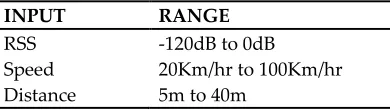
Table 1 Specifications of inputs to FIE
INPUT RANGE
RSS -120dB to 0dB
Speed 20Km/hr to 100Km/hr
Distance 5m to 40m
RSS (dB)
Vehicle Speed (Km/hr)
Distance between vehicles (m)
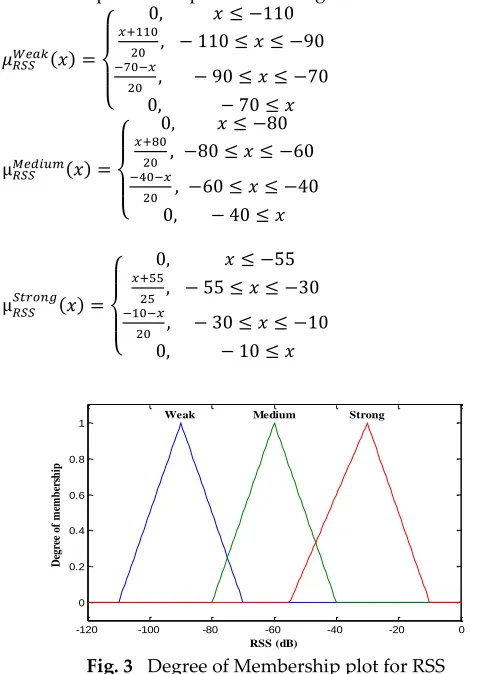
The first input to FIE is received signal strength. The received signal strength is the important metric to evaluate the capacity to extend the communication between the vehicles. Due to frequent changes in mobility pattern in VANET it is important to note the RSS variations before performing the routing process. The triangular membership function (MF) for RSS is given in Eq. 1, 2 and 3.The linguistic variables assigned are weak, medium and strong. The degree of membership of RSS is presented in Fig.3.
𝜇 (𝑥) =
{
0, 𝑥 ≤ −110
, − 110 ≤ 𝑥 ≤ −90
, − 90 ≤ 𝑥 ≤ −70 0, − 70 ≤ 𝑥
(1)
µ (𝑥) =
{
0, 𝑥 ≤ −80
, −80 ≤ 𝑥 ≤ −60
, −60 ≤ 𝑥 ≤ −40
0, − 40 ≤ 𝑥
(2)
µ (𝑥) =
{
0, 𝑥 ≤ −55
, − 55 ≤ 𝑥 ≤ −30
, − 30 ≤ 𝑥 ≤ −10
0, − 10 ≤ 𝑥
(3)
Fig. 3 Degree of Membership plot for RSS
The second input to FIE is speed of the vehicle. The speed of the vehicle is considered to be the judging criteria to calculate the route between the source and the destination vehicle. The main challenge to design a routing protocol for VANET is to cope up the frequent disconnection and route failures. An appropriate route re-establishment process has to be carried out in order to have better performance and also to provide end to end connectivity. The triangular MF for speed of the vehicle is given in Eq. 4, 5 and 6. The linguistic variable assigned is slow, medium and high. The degree of membership plot is presented in Fig.4.
µ (𝑦) =
{
0, 𝑦 ≤ 20
, 20 ≤ 𝑦 ≤ 40
, 40 ≤ 𝑦 ≤ 60 0, 60 ≤ 𝑦
(4)
µ (𝑦) =
{
0, 𝑦 ≤ 40
, 40 ≤ 𝑦 ≤ 60
, 60 ≤ 𝑦 ≤ 80 0, 80 ≤ 𝑦
(5)
µ (𝑦) =
{
0, 𝑦 ≤ 60
, 60 ≤ 𝑦 ≤ 80
, 80 ≤ 𝑦 ≤ 100 0, 100 ≤ 𝑦
(6)
Fig. 4 Degree of Membership plot for Vehicle Speed The third input to FIE is distance between the vehicles. The process to find neighbors during route establishment phase involves the including of distance between the vehicles. The triangular membership function is given in Eq. 7, 8 and 9. The linguistic variables assigned are
near, far and very far. The degree of membership plot is presented in Fig.5.
µ (𝑧) =
{
0, 𝑧 ≤ 5
, 5 ≤ 𝑧 ≤ 15
, 15 ≤ 𝑧 ≤ 20 0, 20 ≤ 𝑧
(7)
µ (𝑧) =
{
0, 𝑧 ≤ 15
, 15 ≤ 𝑧 ≤ 23
, 23 ≤ 𝑧 ≤ 30 0, 30 ≤ 𝑧
(8)
µ (𝑧) =
{
0, 𝑧 ≤ 25
, 25 ≤ 𝑧 ≤ 30
, 30 ≤ 𝑧 ≤ 40 0, 40 ≤ 𝑧
(9)
-120 -100 -80 -60 -40 -20 0 0 0.2 0.4 0.6 0.8 1 RSS (dB) D egr ee of m em b er sh ip
Weak Medium Strong
20 30 40 50 60 70 80 90 100
0 0.2 0.4 0.6 0.8 1
Vehicle Speed (Km/hr)
D egr ee of m em b er sh ip
1555
Fig. 5 Degree of Membership plot for Distance between vehicles
The output of FIE is trust. It is calculated using FIE by taking three inputs such as RSS, Speed of the vehicle and distance between the vehicles. The rules are framed and trust worthy nodes and its route is selected for sending RREP packets. It has given linguistic variable such as low, medium
and high. The MFs for low is Z shaped, medium is Gaussian and for high is S shaped. The equations governing the MF are given in (10), (11) and (12) and the equivalent plot is presented in Fig.6.
µ (𝛼) =
{
1, 𝛼 ≤ 0.04 1 − 2 ( . . ) , 0.04 ≤ 𝛼 ≤ 0.02
2 ( . . ) , 0.2 ≤ 𝛼 ≤ 0.36 0, 𝛼 ≥ 0.36
(10)
µ (𝛼) = 𝑒
( . )
.
(11)
µ (𝛼) =
{
0, 𝛼 ≤ 0.64 2 ( . . ) , 0.64 ≤ 𝛼 ≤ 0.96
1 − 2 ( . . ) , 0.8 ≤ 𝛼 ≤ 0.96 1, 𝛼 ≥ 0.96
(12)
Fig. 6 Degree of Membership plot for trust
4.2.1 Surface Plots
Fig. 7 Surface plot of Vehicle Speed – RSS against trust
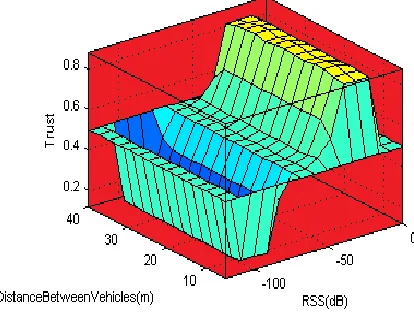
Fig. 8 Surface plot of Distance b/w vehicles – RSS against trust
Fig. 9 Surface plot of Distance b/w vehicles – Vehicle Speed against trust
Fig.7 depicts the variation of RSS and vehicle speed and its equivalent trust. The trust is calculated based on the inputs given to FIE. When the received signal strength is weak and vehicle speed is high, it means vehicle is far from the source node or any intermediate node which lowers the trust value. When the vehicle is moving with constant speed and received signal strength is strong it will results in high trust value. Fig.8 represents the trust value plotted against distance between vehicles and received signal strength. When the distance between the vehicles is near and received signal strength is
5 10 15 20 25 30 35 40
0 0.2 0.4 0.6 0.8 1
Distance between vehicles (m)
D
e
gr
e
e
of
m
e
m
b
e
r
sh
ip
Near Far Very Far
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.2 0.4 0.6 0.8 1
Trust
D
egr
ee
of
m
em
b
er
sh
ip
strong then the trust value is high. When the received signal strength is weak and distance between two vehicles is very far it will ultimately leads to low trust value. From Fig.9, it has proven that when vehicle speed is high and distance between the vehicles is very far, it will lessen the trust value. Similarly when the vehicle speed is slow and distance between the vehicles is near and it will results in high trust value. The IF-THEN rules given to FIE is given in Table 2.
Table 2 Rules designed for FIE to calculate trust
Inputs Output
RSS (dB)
Vehicle speed
(Km/hr)
Distance between vehicles
(m) Trust
Weak Slow Near Medium
Weak Slow Far Medium
Weak Slow Very Far Low
Weak Medium Near Low
Weak Medium Far Low
Weak Medium Very Far Low
Weak High Near Low
Weak High Far Low
Weak High Very Far Low
Medium Slow Near High
Medium Slow Far High
Medium Slow Very Far High
Medium Medium Near Medium
Medium Medium Far Medium
Medium Medium Very Far Medium
Medium High Near Medium
Medium High Far Low
Medium High Very Far Low
Strong Slow Near High
Strong Slow Far High
Strong Slow Very Far High
Strong Medium Near High
Strong Medium Far High
Strong Medium Very Far High
Strong High Near High
Strong High Far Medium
Strong High Very Far Medium
4.3 Algorithm for Network condition 2 Steps:
1. function processing incoming packet 2. while (Vehicle has packet to send) 3. dopkt = receive packet from vehicle 4. if (!=congestion)
5. then broadcastpkt
6. else if (priority == high) &&(priority == medium ) 7. then send pkt to trust route
8. else insert pkt into queue 9. end if
10. end if
11. end while
12. end function
Fig. 10 Priority Check
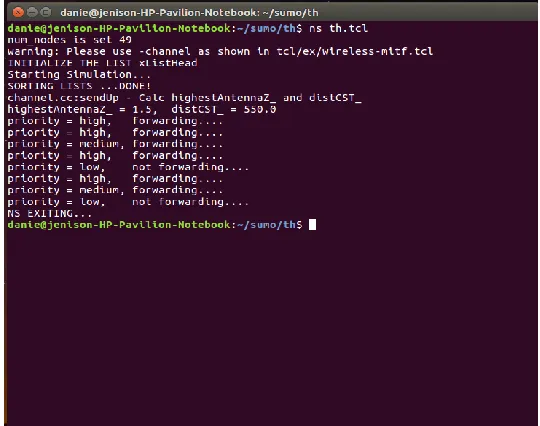
Fig.11 Trace file for proposed work
1557
are sending requests. By assigning priority to the packets having safety messages, the least priority messages can insert into buffer of queue so that they are retained in using the network resources. The available bandwidth is utilized by emergency messages. The priority analysis is done by evaluating the packets header information and decision is done. The priority levels are assigned for messages as per the work proposed in paper *34+. The message type and its level are presented in Table 4
Table 4 Message Priority Level (MPL)
Priority Level Messages
High priority Safety messages Accident detection
Medium priority Traffic report Intersection warning
Low priority
Weather information Tourist attraction point Toll collection Service announcement Movie download
The routing or storing decision is made by the protocol after analyzing the MPL and results are presented in Fig.10. The proposed FTPAODV trace file information is presented in Fig.11.
6 SIMULATION ENVIRONMENT
The simulations needed for evaluating the performance metrics of proposed method has been carried out using MATLAB vR2014a, NS-2.35, SUMO 0.25.0. The FIE and trust calculation are carried out using MATLAB vR2014a. The discrete event simulator NS-2.35 is used to create communication between the vehicles. The real time traffic generated for the proposed work is taken from Coimbatore – Race Course using open street map. From there the interested area is exported and viewed in SUMO 0.25.0. The road network generated via SUMO represents real world networks as graphs. The output of SUMO is used in Network Simulator for the analysis of QoS metrics. By running the .tcl script for the scenario generated from SUMO, will results in two formats of output. One as animation output as .nam file and other as .tr
as trace file. By analyzing the trace file, and by applying the formulae to evaluate the QoS metrics using .awk file will provide the results for the proposed fuzzy based routing protocol. The parameters used for simulation is presented in Table 3.
Table 3 Simulation settings for proposed method
Parameters Settings
Software Tool MATLAB vR2014a, NS-2.35, SUMO 0.25.0 Number of Nodes 37
Simulation Area 900m × 900m Mobility Model Manhattan Model Simulation Time 100s
Queue size 50
Channel bandwidth 2 Mbps IEEE 802.11p data rate 1Mbps
Size of Packet 512 bytes/packet Application Layer FTP
The simulation started with the process of selecting an appropriate area of interest to conduct experiment which is selected using Open Street Map *35+. The selected area from open street map is given in Fig.12. The exported map is given to SUMO to enable the user to visualize the real time traffic as provided in Fig.13.
Fig. 12 Open Street Map
The selected area can be converted to network animator and viewed in NS-2.35. It is presented in Fig.14.
Fig. 14 Equivalent NAM output for selected map
6.1 Integration of NS2, SUMO and Openstreet Map
The following steps are carried out in the process of extracting the real time traffic from open street map to tool command language (TCL) which results in trace file and animated output.
Step 1:
Open OSM webpage and search for the location and click Export (in task bar) https://www.openstreetmap.org/ to download map.
Step 2: Create a folder and copy the downloaded OSM file. Step 3: Convert OSM file to xml file using following comment. netconvert --osm-files filename.osm -o filename.net.xml
Step 4: Convert to following format
polyconvert --osm-files filename.osm --net-file filename.net.xml --type-file osmPolyconvert.typ.xml -o filename.poly.xml
Step 5: python /home/username/sumo0.25.0/tools/randomTrips.py -n file-name.-net.xml -r file-name.rou.xml -e 50 –l. save as filename.sumo.cfg
Step 6: The configuration steps as follows
<configuration> <input>
<net-file value="yours.net.xml"/> <route-files value="yours.rou.xml"/> <additional-files value="yours.poly.xml"/> </input>
<time>
<begin value="0"/> <end value="300"/> <step-length value="0.1"/>
</time>
</configuration>
Step 7: Run the following commands in terminal window
sumo-gui filename.sumo.cfg
sumo -c filename.sumo.cfg --fcd-output filename.sumo.xml
python
/home/username/sumo-0.25.0/tools/traceExporter.py --fcd-input
filename.sumo.xml ns2config-output filename.tcl --ns2mobility-output mobility.tcl --ns2activity-output activity.tcl
Step 8: Copy the code from simple-wireless.tcl and paste it in filename.tcl. Delete all existing mobility information and include new mobility data generated from above steps.
Step 9: Run the tcl script by ns command and get the animated output by nam command.
The proposed protocol is applied to the traffic scenario as shown in Fig.14 and its performance against the conventional protocol is evaluated and presented.
The performance metrics used in the work are expressed as follows,
𝑇𝑟𝑜𝑢𝑔𝑝𝑢𝑡 = (13)
𝑃𝐷𝑅 = × 100% (14)
𝐸𝑛𝑑 𝑡𝑜 𝐸𝑛𝑑 𝑑𝑒𝑙𝑎𝑦 =
*𝑇𝑖𝑚𝑒 𝑎𝑡 𝑤𝑖𝑐 𝑝𝑎𝑐𝑘𝑒𝑡 𝑟𝑒𝑐𝑒𝑖𝑣𝑒𝑑 𝑎𝑡 𝑑𝑒𝑠𝑡𝑖𝑛𝑎𝑡𝑖𝑜𝑛+ −
*𝑇𝑖𝑚𝑒 𝑎𝑡 𝑤𝑖𝑐 𝑠𝑎𝑚𝑒 𝑝𝑎𝑐𝑘𝑒𝑡 𝑠𝑒𝑛𝑡 𝑓𝑟𝑜𝑚 𝑠𝑜𝑢𝑟𝑐𝑒+ (15)
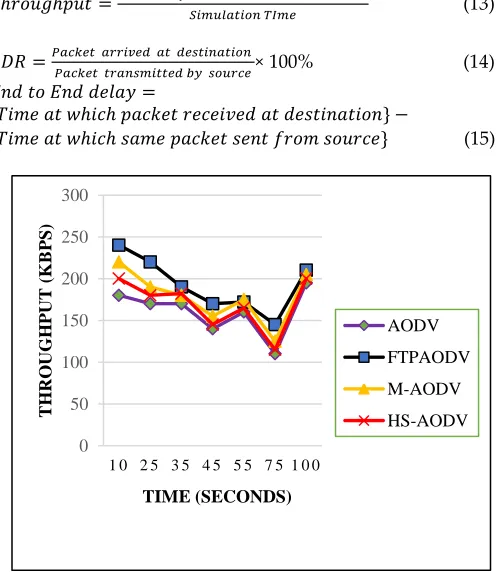
Fig. 15 Average Throughput performance of proposed work Fig.15 shows the throughput comparison of AODV and its variant with proposed protocol. It is clearly visible that number of packet received in the destination via proposed protocol outperforms the conventional approach. The proposed protocol offers 12.5% throughout more than the
0 50 100 150 200 250 300
1 0 2 5 3 5 4 5 5 5 7 5 1 0 0
TH
RO
UG
H
PUT
(K
B
PS
)
TIME (SECONDS)
AODV
FTPAODV
M-AODV
1559
conventional AODV approach at the time instant of 10 sec. At each time instant the throughput performance of FTPAODV is well ahead than classical AODV. The mobility model used in the proposed approach is Manhattan mobility model *36+. The vehicle moves in their lane with constant velocity 20km/hr. The link broken problem and packet loss are overcome in the proposed work because of trust and priority inclusion, thereby increasing the throughput performance.
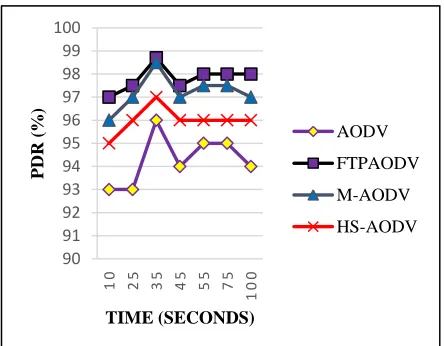
Fig. 16 PDR performance of proposed work
Fig.16 shows the PDR performance of proposed FTP-AODV with its variant. The RREP and data packets are sent through the route with high trust values. Hence the packets are successfully delivered to the destination and thereby exhibit the improved performance when compared to conventional AODV approach. In classical approach the route failures are more frequent which ultimately reduces the PDR. In proposed method, the route with high trust value is selected after considering the received signal strength, speed of the vehicle and distance between the vehicles. Hence the PDR curve shows better performance for FTPAODV.
Fig. 17 End to End Delay performance of proposed work Fig.17 depicts that FTP-AODV has lower end to end delay when compared to conventional AODV and its variant. Connectivity is the major issue in VANET. The vehicles should
be connected till the data transfer completes. In the proposed method, the fuzzy logic takes distance and speed of the vehicle into consideration to evaluate the trust. Hence it will provide end to end connectivity throughout the communication scenario and leads to less delay in receiving the data packets. Hence thereby evaluating the performance of FTP-AODV in terms of throughput, PDR and end to end delay, it out performs the conventional approach in routing. Instead of selecting only hop count as a metric to calculate the best route, the proposed method includes fuzzy based trust calculation and provides priority for the emergency messages during congestion.
4
CONCLUSION
In the proposed work, soft computing technique is used to improve the routing performance in VANET. Fuzzy logic is an efficient technique to provide solution for calculating the stability of the entire network. In the proposed work for normal condition of the network, fuzzy concept is incorporated into the routing strategy in order to find the stable route by analyzing the received signal strength, speed of the vehicle and distance between vehicles. In congested network condition, the concept of priority is embedded into the AODV routing and exhibit the way for safety message or high priority messages can be accommodate in the network. The proposed FTPAODV is designed by modifying the core AODV with the advancement feature, so that it is suitable for highly dynamic environment like VANET. This result in the improvement of performance compared to the conventional scheme. In future, various Multi Attribute Decision Making (MADM) approach can be included in networking protocol to enhance the route selection process.
ACKNOWLEDGMENT
The authors wish to thank Jenison.J, Deepak Infant Karnish, Anantha Santhosh Graceson and Allen A.k for their support in NS2 and SUMO integration.
R
EFERENCES[1] Fubler H, Torrent-Moreno M, Transier M, Kruger R, Hartenstein H, Effelsberg W, “Studying vehicle movements on highways and their impact on ad-hoc connectivity”, ACM SIGMOBILE Mobile Computing and Communications Review 10(4): 26-27,2006. [2] Chen W, Cai S, “Ad hoc peer-to-peer network
architecture for vehicle safety communications”, IEEE Commun Mag 43(4):100-107,2005
[3] Evangeline CS, Appu S , “An Efficient Data Transmission in VANET Using Clustering Method”, International Journal of Electronics and Telecommunications 63(3):309-313,2017.
[4] Rouse M., “Vehicle-to-vehicle communication (V2V communication)”, Internet of Things Agenda, 2014
90 91 92 93 94 95 96 97 98 99 100
10 25 35 45 55 75
100
PDR (%
)
TIME (SECONDS)
AODV
FTPAODV
M-AODV
HS-AODV
0 10 20 30 40 50 60 70 80 90 100
1 0 2 5 3 5 4 5 5 5 7 5 1 0 0
AV
ERA
G
E
END
TO
END
DELA
Y(M
S
)
TIME(MS)
AODV
FTPAODV
M-AODV
[5] Abbas NI, Ilkan M, Ozen E , “Fuzzy approach to improving route stability of the AODV routing protocol”, EURASIP J Wirel Commun and Netw (1):235, 2015.
[6] Bouassida MS, Shawky M , “A cooperative congestion control approach within VANETs: formal verification and performance evaluation”, EURASIP J Wirel Commun and Netw (1):712525, 2010.
[7] Cunha F, Villas L, Boukerche A, Maia G, Viana A, Mini RA, Loureiro AA, “Data communication in VANETs: Protocols, applications and challenges”, Ad Hoc Networks 44:90-103, 2016.
[8] Rajesh MV, Gireendranath TVS, Murthy JVR , “A Novel Energy Efficient Cluster Based Routing Protocol for Highly Dense MANET Architecture”, International Journal of Computational Intelligence Research 13(5):719-744, 2017.
[9] Ding B, Chen Z, Wang Y, Yu H (2011) An improved AODV routing protocol for VANETs. In: 2011
International Conference on Wireless
Communications and Signal Processing (WCSP,pp. 1-5, IEEE).
[10] Al-Doori MM, Al-Bayatti AH, Zedan H , “Context aware architecture for sending adaptive HELLO messages in VANET”, In: 4th ACM International Workshop on Context-Awareness for Self-Managing Systems, p. 10, 2010.
[11] Ferreiro-Lage JA, Gestoso CP, Rubinos O, Agelet FA, “Analysis of unicast routing protocols for VANETs”, In: Fifth International Conference on Networking and Services(ICNS'09, pp. 518-521, IEEE),2009
[12] Karimi R, Ithnin N, Razak SA, Najafzadeh S, “Non DTN geographic routing protocols for vehicular ad hoc networks”, International Journal of Computer Science Issues 8(5):86, 2011.
[13] Tornell SM, Cesariny CMTDA, Manzoni P ,”DTN protocols for vehicular networks: An application oriented overview”, IEEE Communications Surveys and Tutorials 17(2):868-887, 2015
[14] Paul B, Ibrahim M, Bikas M, Naser A, “VANET routing protocols: Pros and cons”, arXiv preprint arXiv:1204.1201,2012.
[15] Kaur M, Virk AK, “An improved multicast AODV routing protocol for VANETs”,. Int. J. Comput. Appl 21(6):14-23
[16] Chen Y, Xiang Z, Jian W, Jiang W,”An improved AOMDV routing protocol for V2V communication”, In: IEEE Intelligent Vehicles Symposium, IEEE, pp. 1115-1120, 2009.
[17] Lee ZJ, Chou ST, Lee CY, Peng BY ,”AODV with intelligent priority flow scheme for multi-hop ad hoc networks”, Vietnam Journal of Computer Science 3(4):259-265, 2016.
[18] Huang CJ, Chuang YT, Hu KW ,”Using particle swam optimization for QoS in ad-hoc multicast”, Engineering Applications of Artificial Intelligence 22(8):1188-1193,2009.
[19] Natsheh E, Khatun S, Jantan AB , “Adaptive Fuzzy Route Lifetime for Wireless Ad-hoc Networks”, Int. Arab J. Inf. Technol. 3(4): 283-290, 2006.
[20] Jayabarathan JK, Avaninathan SR, Savarimuthu R , “QoS enhancement in MANETs using priority aware mechanism in DSR protocol”, EURASIP J Wirel Commun and Netw (1):131, 2016.
[21] Lee SJ, Gerla M (2000), “AODV-BR: Backup routing in ad hoc networks”, In : IEEE Wireless Communications and Networking Conference.(Vol. 3, pp. 1311-1316, IEEE),2000.
[22] Mutalik P, Nagaraj S, Vedavyas J, Biradar RV, Patil VGC, “A comparative study on AODV, DSR and DSDV routing protocols for Intelligent Transportation System (ITS) in metro cities for road traffic safety using VANET route traffic analysis (VRTA)”, In : IEEE International Conference on Advances in Electronics, Communication and Computer Technology (ICAECCT, pp. 383-386), 2016.
[23] Manna S, Mondal AK, Sarcar P (2017), “Optimal path selection for AODV routing protocol in MANET”, In: Computer, Communication and Electrical Technology Proceedings of the International Conference on Advancement of Computer Communication and Electrical Technology, p. 121, CRC Press., 2017.
[24] Marwaha S, Srinivasan D, Tham CK, Vasilakos A, “Evolutionary fuzzy multi-objective routing for wireless mobile ad hoc networks”, In : Congress on Evolutionary Computation( CEC2004, pp. 1964-1971,IEEE), 2004
[25] Xu B, Li Y, “A novel link stability and energy aware routing with tradeoff strategy in mobile ad hoc networks”, J. Commun 9(9):706-713,2014.
[26] Gayathri D, Raman SJ, “Pltrust AODV: Physical logical factor estimated trust embedded AODV for optimised routing in Manets”, In : 4th International Conference on Advanced Computing and Communication Systems (ICACCS, pp. 1-5, IEEE),2017.
[27] Datta A, Chowdhury C, Neogy S, “Ant-AODV-VANET: a bio-inspired routing protocol for VANET”, In : International Conference on Emerging Research in Computing, Information, Communication and Applications (pp. 251-261). Springer, 2016.
[28] Mubarek FS, Aliesawi SA, Alheeti KM, Alfahad NM
,”Urban-AODV: an improved AODV protocol for
vehicular ad-hoc networks in urban
1561 [29] Yang X, Zhang H, Gao X, Hu Y, “Research of
HS-AODV routing protocol based on fuzzy control theory”, In 2015 Chinese Automation Congress (CAC). 1023-1028. IEEE, 2015.
[30] Sharma V, Alam B, Doja MN, “Fuzzy-Based
M-AODV Routing Protocol in MANETs”, In
Proceedings of the Second International Conference on Computer and Communication Technologies. pp. 773-779. Springer, New Delhi,2016.
[31] Das SR, Belding-Royer EM, Perkins CE (2003), “Ad hoc on-demand distance vector (AODV) routing”,
https://tools.ietf.org/html/rfc3561.Accessed July 2003. [32] Perkins CE, Royer EM, Das SR, Marina MK ,
“Performance comparison of two on-demand routing protocols for ad hoc networks”, IEEE Personal Communications 8(1): 16-28, 2001.
[33] Budke D, Farkas K, Plattner B, Wellnitz O, Wolf L, “Real-time multiplayer game support using QoS mechanisms in mobile ad hoc networks”, In: Third Annual Conference on Wireless On-demand Network Systems and Services (WONS, pp. 32-40),2006. [34] Abdou W, Darties B, Mbarek N, “Priority levels based
multi-hop broadcasting method for vehicular ad hoc networks”, Annals of telecommunications-annales des telecommunications 70:359-368,2015.
[35] Behrisch M, Bieker L, Erdmann J, Krajzewicz D, “Sumo–simulation of urban mobility”, In: Third International Conference on Advances in System Simulation (SIMUL 2011),2011.