MURDOCH RESEARCH REPOSITORY
http://dx.doi.org/10.1109/ANZIIS.1995.705720
Li, W. and Attikiouzel, Y. (1995) Initialization of clustering
algorithms for unsupervised segmentation of multi-echo MR
images. In: Proceedings of the Third Australian and New
Zealand Conference on Intelligent Information Systems,
ANZIIS-95, 27 November, Perth, Western Australia, pp. 88-92.
http://researchrepository.murdoch.edu.au/19522/
Copyright © 1995 IEEE
Personal use of this material is permitted. However, permission to reprint/republish
this material for advertising or promotional purposes or for creating new collective
Wanqing
Li
Yianni Attikiouzel
Centre for Intelligent Information Processing SystemsThe University of Western Australia [email protected], [email protected]
ABSTRACT
Unsupervised segmentation is a key step towards automatic analysis and understanding of MR images. A number of techniques based on multi-dimensional d a t a classification have been applied t o this problem. Since most unsupervised classification approaches suffer from local traps, the segmentation often depends on the initialization of the classification algorithm used. In this paper,
a
method,,to deal with the initialization, especial the class centres, is addressed. The method consists of two steps, finding class centre candidates through analyzing the one- and multi-dimensional histograms of the MR images and secondly selecting the required number of most possible class centres from these candidates under a certain criteria. Results obtained using actual dual-echo MR images, both the class centre candidates and segmentat ion of the images, have shown t h a t the proposed method is able t o find suitable class centres for classification algorithms and hence consistent segmentation can be obtained.1.
Introduction
Magnetic Resonance Imaging [14] is a non-invasive technique to detect the magnetic properties of atomic nuclei, like hydrogen or proton, contained in biological tissues. The contrast in the images mainly depends on the intrinsic tissue parame- ters: proton density ( P D ) , the spin-lattice relax- ation time
(Tl)
and the spin-spin relaxation time (T2) and the extrinsic pulse sequence parameters: repetition time (TR) and echo time (TE) under a certain kind of imaging radio frequency sequences, for example spin echo(SE).
With a tailored pulse sequence with a given T R , multi-echo MR images can be obtained for different echo times. Each echo has its specific weighted magnetic properties, such as P D weighted ( P D W ) , T l weighted ( T l W ) or T 2 weighted (T2W), and hence provides specific distin- guishable features for the various tissues. From the sequence of echoes, both structural and functional information about the tissues can be obtained for medical diagnosis or other purposes.Recent progress in M R I techniques in term of resolution and scanning speed makes the manual analysis of MR images by radiologists obsolete. Therefore, there is a growing interest in the auto- matic or semi-automatic analysis by utilizing com- puters and computational intelligence. T h e main bottle-neck of automatic analysis is the segmenta- tion of the images, which is a process t h a t automat- ically groups together pixels belonging t o the same
tissue and labels them for further understanding or inference.
The techniques for segmenting multi-echo MR images can be classified into supervised and unsu- pervised [1, 11, 12, 61. Most of these are based on multi-dimensional d a t a classification theory. In su- pervised methods, a set of labeled training patterns has to be collected for each tissue type by an expert t o train the classifier and a special interactive envi- ronment must be developed for immediate correc- tion of any unreasonable results that arise from the inappropriate choice of training samples. Repre- sentative methods are feedforward neural networks
[l, 12, 61, the probability neural network [1, 111,
statistical mixture models [ l , 111, and the I<-nearest neighbour rule [l].
In contrast to supervised methods, unsuper- vised ones try to cluster patterns into classes under some criteria without any prior knowledge. Pat- terns in the same class have quite similar proper- ties and patterns from different classes have dis- tinctly unlike properties. Representative methods are Finite Gaussian Mixture Model (FGMM) with Expectation Maximization (EM) algorithm [1, 81,
fuzzy C-means (FCM)
[6,
21, K-means [1, 31, LVQand Kohonen network [i', 131.
problem space in order t o minimize the clustering error. This inevitably leads to local minimaor max- ima. In consequence, the initial values with which the algorithm starts are crucial to the performance
[9, 101.
In this paper, a method is presented for finding appropriate initial values for automatic segmenta- tion of multi-echo
MR
images using clustering al- gorithms. Section 2 describes a general framework of unsupervised segmentation based on clustering algorithms and the associated problem with initial- ization. In section3
a solution t o this problem is outlined. Section4
gives the results for a pairof actual dual-echo
MR
images and the concluding remarks.2. The Problem
of
Unsupervised Seg-
mentation Based on Clustering Al-
gorithms
Considering a pixel x in multi-echo
MR
images as a pattern, it can be represented by a vectorx
= ( x l , x 2 ,. . . , x p ) ,
wherexi
is the density of the pixel on thei’th
echo. The automatic segmentation of images based on a multi-dimensional d a t a clus- tering algorithm consists of two main steps. The first, which is also the most crucial, is t o cluster pixel patterns into classes and then form a coarse segmentation of the images. The second step is to correct mis-clustered pixels by incorporating spa- tial constrains or domain knowledge. It is obvious that the performance of the clustering algorithms is essential for the accuracy and reproduction of the segments.The general framework for unsupervised clus- tering algorithms can be described as follows.
Step 0 Initialize the algorithm, which includes the number of classes, starting centre of every class and terminating condition for the algo- rithm.
Step 1 Exclusively assign one class to every pat- tern according to the similarities between the class centres and the pattern.
Step 2 Check whether the classification of pat- terns has reached the terminating condition. If it does, then the most current class assign- ment of the patterns is the final clustering.
0 t herwise, continue.
Step 3 Update the class centres using optimiza- tion techniques, such as the gradient scheme in K-means or
LVQ,
maximum likelihood in FGMM. G o t o Step 1 .Because of the possible local minima or max- ima in the optimization in Step 3, the initial values are crucial for the final classification of patterns. ~
Observations [9, 3, 21 have shown that the class centres are the most important among the initial values. Starting with different initial class centres, the classification of patterns can be entirely differ- ent. Therefore, the problem here is how to find appropriate initial centres to ensure that the results are consistent and reproducible.
3. Finding Initial Class Centres
Motivation to use multi-echo images in medical di- agnosis [16] is that the density contrasts among tissues in one echo depends on the imaging pa- rameters. Because of the great variation in their magnetic properties of tissues, such as their
PD,
T1 andT2
values, it is impossible to recognize orseparate all tissues in only one echo. With multi- echo techniques, different tissues can be separated from others in different echoes. For example, in PDW echo, the contrast between G W and CSF is too low to distinguish them from each other; but in T2W echo, the separation of GW from CSF is obvious.
This observation implies that it is possible to find the possible tissue distinguishability of all echos by considering it separately and independently in each echo, and hence t o form class centre candi- dates.
3.1. Class Centre Candidates
The basic idea of our method for finding class centre candidates is similar to that of selecting thresholds from
1D
histogram for segmentation[15,
51.
It, is as- sumed that if a tissue is distinguishable in one echo, its density distribution must form a peak in the1D histogram of that echo. By detecting peaks of each echo’s histogram first, and then searching the densities of other echoes in the multi-dimensional histogram, a set of possible class centre candidates can be obtained. The method consists of two steps, one is peak-finding and the other is searching the multi-hastogram.
Peakfinding Given the histogram function hi
(x)
of the
ith
echo, where z is the density variable and the quantity ofhi(x)
is the number of pixels in the echo whose densities are z, it is first iteratively smoothed.
Then the peaks of hi(.) a t xi!, for 1 = 1 , 2 , . . . , L , c a n bedetected ifecho, to find the corresponding density in the j t h echo, the multi-dimensional histogram is projected to the feature space formed by the ith and j t h
echo density. This is denoted as h v ( z , y), where
J:, y denotes the density of the ith and j t h echo
respectively, the quantity of h,j(z, y) is the number
of pixels whose densities in the i t h and j t h echo are
J: and y respectively.
N o w , the highest peak of the curve h i j ( ~ : ; l , y ) ,
1 = 1,2,.
.
' ,
L , is chosen as the density of j t h echo with respect to z;l. Repeating the projections andfinding the corresponding highest peak for all j
#
i,j = 1 , 2 , . . .
,
p , a candidate class centre vector can be ohtrained which is associated with the z,l. Sincethere are totally p echoes, these peak-finding and searching procedures are applied to all echoes inde- pendently. The results forms a set of possible class cent, re candidates.
Because each echo is treated independently, there may be more than one candidate centres for
one tissue if it is distinguishable in more than one echoes. 'Therefore, class centres have to be select,ed according to a certain criteria so as to avoid two or
more ceittres that, ate actually from one tissue.
3.2. Seloction of Initial Class Centres
'I'hr? criteria for selecting g class centres frorn the candidates are on the observation that the cen- t.res shonld be located a t the peaks of the multi- dimensional histogram and should be separated as
far as possible. This approach guarantees that the candidates are around the peaks. Hence, the selec- tion of class centres can be conducted on the basis of the distance arnong them.
Suppose that there are
Ii'
candidates x k , k = I, 2 , . . .,
I ( , the procedures for selecting g,
g5
K ,class centres frorii them are
STEP 1 Set u p two sets M and C , where M , initialized as empty, is the selected centres; C , initialized as all candidates, contains the current, candidates for selection.
STEP 2 Move one candidate x, from C to M. Normilly the one with small densities of all echoes is chosen first. as it is most prolmbly the background.
STEP 3 Compute the weighted Fhclidean dis- tance from each candidate x k in C k) each selected class centre xm i n M , dkm.
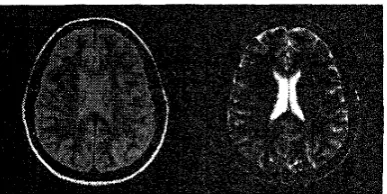
Fig. 1 : A typical dual-echo M l i brain slice: the left o n e IS
PDW and the right one is T 2 W .
where, h(x) is the value of the m u l t i - histogram a t x.
STEP 4 Choose the candidate x k , as the next
class centre, if
Add x k ! bo M and remove i t from C .
to S'I'EP 3 ; othrwise, s h p .
STEP 5 If the nuniber of centres is less t.tiaii g, g o
4.
Results and Conclusion
4.1. R.esiilts
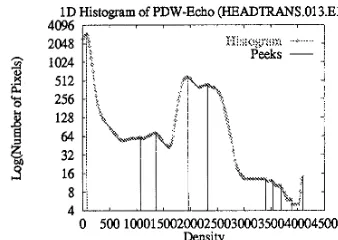
The methods were implemented and applied to ail actual dual-echo MRI slice, as shown i n Figure I , one echo was PDW and the ot.her was '1'2W. Fig- lire 2 is the smoothed histograni of the I'WII actio and the peaks are shown on it. Figure 3 is the
smoot,hed histogram of the 'Y2W ec:ho ant1 peaks detected on it. Through correlating t,hese peaks mi t,he 2D histograni, there are totally 20 class c'eii-
tre candidates found. Some of t,tiern represenl the
same tissue. 'I'tie selection procedure ( m i avoicl (,lie repeated choice of class centres 1)elorigirig to it sariie class. Figure 4 is the 21) histlograni and the six tiiosi.
possible class centre carid idat,es.
With the first six class cerilre cantlictates, the
automatic segmentation results of' t,tie dual-ec:Iio MR images with FGMM and FCM algoritlitns are shown i n Figure 5 and 6 respectively.
I t should point. oiit thai, the cliiss (xIIL~~: V ~ I I I P S selected by o u r method are quite close to those chosen rriaiiiially and the segnienbation resulk are
1D Histogram of PDW-Echo (HEADTRANS.013.El) 4096, , , , ' I 7 I
h
3
Y c2048
bi
1024 512 256 128
64 32
16
8
A
-
0 500 10001500200025003000350040004500
Density
Fig. 2: One dimensional histogram of the PDW echo and its peaks.
Fig. 5: Segmentation of the slice by FGMM with initial class centres selected by our method.
1D Histogram of T2W-Echo (HEADTRANS.013.E2) 4 0 9 6 ) , , , I , , I
0 50010001500200025003000350040004500 Density
Fig. 3: One dimensional histograms of the T2W echo and its peaks.
2D Histogram of Dual-Echo MR Images (HEADTRANS.013) 4500, , , I , , I
4000 3500 3000
8
25005 2000 1000
500 n
0 500 10001500200025003000350040004500 Density of Echo 1
Fig. 6: Segmentation of the slice by FCM with initial class centres selected by our method.
Fig. 4: The two dimensional histogram of the slice shown in Figure 1 and the six initial class centres selected by our
a method was presented t o find and choose initial class centres for the clustering based segmentation of MR images. Although it is proposed for multi- echo MR images, it is also feasible t o deal with the problem of choosing effective class centres for most multi-dimensional d a t a classification problems.
ACKNOWLEDGMENT
Wanqing Li is supported by the Overseas Postgrad- uate Research Scholarship (OPRS) of Australia and the University Research Studentship (URS) of The University of Western Australia
References
[l]
J . C . Bezdek, L.O. Hall, and L.P. Clarke. Re- view of MR image segmentation techniques using pattern recognition. Am. Assoc. Phys. Med., 20(4):1033-48, Jul/Aug 1993.Puttern Recognition with Fuzzy Objective Function Algorithms. Ad-
vanced Applications in Pattern Recognition. Plenum Press, New York, 1981.
[3] Richard
0.
Duda and Peter E. Hart. Pattern Classa’cution und Scene Analysis. John Wiley and Sons, New York, 1973.[4] Guido Gerig, John Martin, Ron Kikinis, and et .al. Unsupervised tissue type segmentation of 3d dual-echo mr head data. Image und Vision Computing, 10(6):349-60, Jul/Aug 1992. [5] C.A. Glasbey. An analysis of histogram-based
thresholding algorithms. CVGIP:Gruphicul Models and Image Processing, 55(6):532-537, Nov. 1993.
[6] Lawrence
0.
Hall, Amine M. Bensaid, and LaurenceP.
Clarke.A
comparison of neu- ral network and fuzzy clustering techniques in segmenting magnetic resonance images of the brain. I E E E Truns. Neural Networks, 3 (5) :672-82,
Sept 1992.[7] Teuvo Kohonen. Self-Orgunizcation and Asso- ciutive Memory. Springer-Verlag, Berlin Hei- delberg, second edition, 1988.
[8] Z Linag, R.J. Jaszczak, and R.E. Coleman. Parameter estimation of finite mixture using the em algorithm and information criteria with application t o medical image processing. I E E E Truns Nucleur Science, 39(4):1126-33, 1992. [9] Geoffrey J . McLachlan and Kaye E. Basford.
Mixture Mode1s:Inference und Applicutions to Clustering. Marcel Dekker, Inc. New York, 1988.
[2] Bezdek James
C.
[ll] M Morrison and Y Attikiouzel. An introduc- tion t o the segmentation of megnetic resonance medical images. The Australzun Computer Journal, 26(3):90-98, Aug 1994.
[12] Mehmed Ozkan, Benoid M. Dawant, and Robert
J.
Maciunas. Neural-netwrok-based segmentation of multi-modal medical images:A
comparative and prospective study. IEEE Trans. Medzcul Imugang, 12(3) 534-44, Sept 1993.[13] Nikhil R Pal, James
C
Bezdek, and EricC.-K.
Tsao. Generalized clustering networks and ko- honen’s self-organizing scheme. IEEE Trunsuc- tzons on Neural Networks, 4(4):549-557, July 1993.[14] Peter A . Rinck. An Zntroductzon to Mugnetzc Resonunce an Medacane. Georg Thieme Verlag, Thieme Medical Publishers, Inc., 1990. [15] P.K.Sahoo,
S.
Soltani,A.K.C. Wong,andY.C.Chen. A survey of thresholding techniques. Computer Vasaon, Graphzcs und Image Pro- cesszng, 41:233-260, 1988.