International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)274
Using The Genetic Algorithm, Security Enhancement of
Aircraft Landing Control System
Abstract— This paper presents a new approach for enhancing the security on the aircraft system during landing phase. There are some dangerous conditions like gusts and downbursts which may occur rarely in service life of aircraft, though, aircraft must be tested for these dangerous conditions. This flight control system is capable of providing the failure identification and detection during landing. In this research a trajectory optimization has being undertaken using Genetic Algorithm.
Keywords— aircraft landing controller, airplane forced landing, Flight control system, Genetic algorithm, intelligent control.
I. INTRODUCTION
The study of safe landing of an aircraft is a very important issue in the aviation field and is considered by pilot as the most demanding task in every flight[6]. In order to achieve the safe landing, an aircraft can be so controlled in such a way that their wheels touch the ground comfortably within the paved surface of runway. The stability and controllability are major considerations during the landing operations so that an aircraft should touch the ground gently[1].
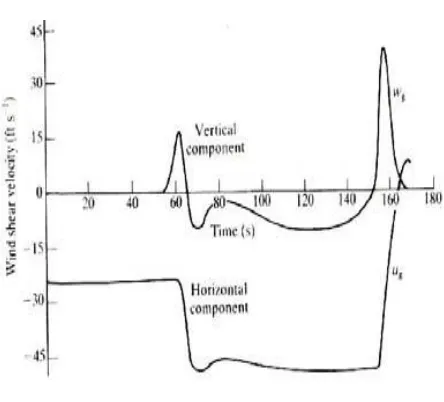
[image:1.595.321.543.274.475.2]On 24June, 1975 in John F. Kennedy Airport a Boeing-727 aircraft had a hard crash, during its Landing phase, due to a strong downburst gust fig. 1 and its 112 out of 124 passengers died[5] . That was one of thousands of such crashes which have been occurred in the landing phase of the aircraft such as due to human error, scheduling problems between various flights, due to engine failure, wind disturbance, aircrafts traffic and so on these all conditions will be overcome if only a more optimal landing maneuver was carried out[5].
Fig. 1: JFK Airport Downburst
When an engine failure occurs in an aircraft and no additional power is available, the pilot must select a suitable location to land safely with the limited amount of energy available from the engine failure position.
II.SAFE LANDING CONTROL THEORY
During the landing phase, pilot descent from cruising altitude to an altitude of approximately 1200 ft above the ground. The pilot then positions the aircraft on a heading towards the centreline of the runway. The outer airport marker, which is approximately 4 nautical miles from the runway, the glide path signal is intercepted, as illustrated in figure 2. When the aircraft descends along the glide path to flare path, then its pitch, attitude, and speed must be controlled[1].
.
Parul Dewangan
1, Somesh Kumar Dewangan
21M. Tech. (IS) IV Semester Department of Computer Science and Engg, DIMAT Raipur (C.G.)
2
Asst. Professor Department of Computer Science and Engg.DIMAT Raipur (C.G.)
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)275
Figure2. Aircraft descend from glide to flare path
A. Landing Approaches:-
The forces acting on an aircraft during flying are lift L), drag (D), thrust (T), and weight (W) of aircraft. The approach and landing exercise deals with landing of the aircraft from the turn on to downwind position to the completion of the landing run. A good landing follows a steady approach. The final landing approach begins when the flight path is aligned with the runway in preparation for straight ahead descent and landing and ends when aircraft contacts the landing surface. Thus the final approach may be considered to have five distinct phases listed below and also in figure.3.[4].
Figure3. Phases of final approach
Before the final approach is begun, the pilot performs a landing checklist to ensure that critical items such as fuel flow, landing gear down, and carburetor heat on are not forgotten. Flaps are used for most landings because they permit a lower- approach speed and a steeper angle of descent. This gives the pilot a better view of the landing area.
III.PROBLEM DESCRIPTION
During the complex maneuvers, such as landing the problem can become even more complex, while gusts and other natural climatic conditions are present. There are two types of modes, first is glide-slope holds and intercept and the other are flare and touchdown. The following issues are discussed, during landing phase of a flight:
1. For the initialization of glide mode, a suitable altitude must be selected.
2. At the height of about 15 meters, the flare maneuver is started, the pilot allowing the main gear to touch the ground firstly and smoothly by lifting the nose of aircraft and reducing the vertical speed of the aircraft.
3. By continuous decrease in the aircraft altitude, the ground effect starts to play a major role and the aircraft dynamics becomes affected accordingly.
4. Gust and downburst, which have an unavoidable effect on the aircraft dynamics, do not follow a well-known pattern.
Based on these situations, the controller performance will be evaluated[5].
A. Failures in Flight Dynamic system:---
1. E m e r g e n c y L a n d i n g s- Cancelling the flight makes the premiere example of a safe emergency landing. The next best is a precautionary landing made while you still have visibility, fuel, and an engine. This precautionary landing at least gives you choices that might otherwise be unavailable.
2.
M e c h a n i c a l E n g i n e F a i l u r e - A rapid and total loss of engine oil in flight is indicated by a loss of oil pressure without an increase in oil temperature since there will be no oil in the vicinityof the oil temperature probe
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)276
3.
Lack of air is most common due to induction or carburetor icing. Proper fuel management most easily avoids the most common cause of engine failure. Fuel starvation is when fuel is available but not getting to the engine. Fuel exhaustion is when you are out of fuel.4. F i r e - Most encounters with fire in aircraft end as non-events. Even the non-events would not happen if the pilot makes a no-go decision because of empty holes in the panel. Flying with a known deficiency is just looking for trouble. Preparing for an in-flight smoke/fire occasion should begin with carrying a handheld radio that will give you communications with the electrical system off. Having a small halogen extinguisher is additional insurance.
5. D i t c h i n g- An over water flight is any flight at which your altitude will not allow gliding distance to land. Don't involve yourself in an over water flight without at least a life vest. Wear your life vest because you won't have time to put it on in an emergency.
6. C o n t r o l F a i l u r e- Unless situation is critical it is best to do nothing in the event of control failure. Elevators can jam due to external object. This is just as likely to occur in the cockpit, as it is in the control itself. Should rudder fail you can still turn with obvious yaw. Doors can act as rudders. Broken throttle should result in some power. Remaining power can be controlled with mixture, magnetos.
7. B i r d s- the Bay Area is in the western migratory bird flyway. Spring and fall seasons are the high strike probability periods. Over 50% of strikes are sea gulls. 70% of strikes are in daylight. 90% of these are below 3000' and near an airport. Avoid game refuge areas.
IV. GENETIC ALGORITHM
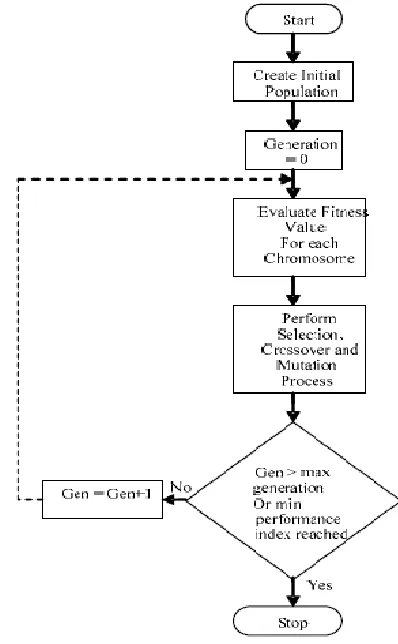
Genetic Algorithms is a stochastic global optimization search technique based on the mechanisms of natural selection and generation. Recently, GA has been recognized as a technique for solving optimization problems, efficiently and effectively. GA starts with an initial population containing a number of chromosomes where each one represents a solution of the problem which performance is evaluated by a fitness function[11].
[image:3.595.329.528.360.682.2]Basically, GA consists of three main stages: Selection, crossover and mutation. These three basic operations help to create new individuals which may be better than their original parents. The algorithm is repeated for many generations and finally stops when get an optimal response. The architecture of GA is illustrated in figure 4.[2]
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)277
The steps involved in creating and implementing a genetic algorithm [7][9][11]:
1. Generate an initial, random population of individuals for a fixed size.
2. Evaluate their fitness.
3. Select the fittest members of the population. 4. Reproduce using a probabilistic method (e.g.,
roulette wheel).
5. Implement crossover operation on the
reproduced chromosomes (choosing
probabilistically both the crossover site and the .mates.).
6. Execute mutation operation with low probability.
7. Repeat step 2 until a predefined convergence criterion is met.
These operations of GA will be explained in the following section.
A. Population Size:-
Determining the number of population is the One of the important steps in GA. From my reading of various papers, it suggested that the safe population size is from 30 to 100.
B. Reproduction:-
During the reproduction phase the fitness value of each chromosome is assessed. Just like in natural evolution, a fit chromosome has a higher probability of being selected for reproduction multiple copies of the same string may be selected for reproduction and the fitter strings should begin to dominate.
C. Crossover:-
Once the selection process is completed, the crossover algorithm is initiated. The crossover operation swaps certain parts of the two selected strings in a bid to capture the good parts of old chromosomes and create better new ones. A probability of 0% means that the .offspring will be exact replicas of their parents and a probability of 100% means that each generation will be composed of entirely new offspring. There are different types of crossover:-
1. Single Point Crossover- The simplest crossover
technique is the Single Point Crossover. If the strings 10000 and 01110 are selected for crossover and the value of k is randomly set to 3 then the newly created strings will be 10010 and 01100 as shown in Figure 5.
100 00 10010 011 10 01100
Figure5. Illustration of Crossover.
2. Multipoint Crossover: - If the string 11111 and 00000 were selected for crossover and the multipoint crossover positions were selected to be 2 and 4 then the newly created strings will be 11001 and 00110 as shown in Figure 6.
1111 1 11001 0000 0 00110
Figure6. Illustration of Multipoint Crossover.
3. Uniform Crossover: - In uniform crossover, a random mask of ones and zeros of the same length as the parent strings is used. If the string 10101 and 01010 were selected for crossover with the mask 10101 then newly created strings would be 11111 and 00000 as shown in Figure 7.
10101 11111 10101
01010 00000
Figure7. Illustration of a Uniform Crossover.
D. Mutation:-
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)278
If the GA chooses bit position 4 for mutation in the binary string 10000; the resulting string is 10010 as the fourth bit in the string is flipped as shown in Figure 8.[4]
.
10000 10010
Figure8. Illustration of Mutation Operation
V. CONCLUSION
This paper analyzes the stability of an intelligent aircraft landing control system using Genetic Algorithm. The results from various GA search have confirmed GA’s effectiveness to explore the solution domain as well as its capability to successfully identify the most promising trajectory paths to a forced landing maneuvers.
References
[1] Jih-Gau Juang, Member, IEEE, Li-Hsiang Chien, and Felix Lin “Automatic Landing Control system Design Using Adaptive Neural Network and Its Hardware Realization” IEEE SYSTEMS JOURNAL, VOL. 5, NO. 2, JUNE 2011.
[2] Neenu Thomas, Dr. P. Poongodi “Position Control of DC Motor Using Genetic Algorithm Based PID Controller” Proceedings of the World Congress on Engineering 2009 Vol II WCE 2009, July 1 - 3, 2009, London, U.K.
[3] S.M. Giriraj Kumar,1 R. Jain,1 N. Anantharaman,3 V. Dharmalingam2 and K.M.M. Sheriffa Begum3 “Genetic Algorithm Based PID Controller Tuning for a Model Bioreactor” INDIAN CHEMICAL ENGINEER Copyright © 2008 Indian Institute of Chemical Engineers Vol. 50 No. 3 July-September 2008, pp. 214-226.
[4] D. K. Chaturvedi Dr.” Applications of Generalised Neural Network for Aircraft Landing Control System”, soft computing, September 2004.
[5] S. M. B. Malaek1, Nasser Sadati2, Hojjat Izadi3, Mehrdad Pakmehr4 “Intelligent Autolanding Controller Design using Neural Networks and Fuzzy Logic”,2004.
[6] Peter Tong*, Cees Bil George Galanis “Genetic Algorithm Applied to a Forced Landing Maneuver” RMIT University, Defense science and Technology Organization Australia, 2004.
[7] Q.Wang, P.Spronck & R.Tracht, “An Overview of Genetic
Algorithms Applied To Control Engineering Problems”
Proceedings of the SecondConference on Machine Learning and Cybernetics, 2003.
[8] J. Shen, E. K. Park, R. E. Bach, "Comprehensive Analysis of Two
Downburst-Related Aircraft Accidents", Journal ofAircraft, Vol. 33, No. 5, PP. 924-930, 1996.
[9] Salami, M. and Cain, G., “An Adaptive PID Controller Based on Genetic Algorithm Processor”, Genetic Algorithms in Engineering Systems: Innovations and Applications, 12-14 September, Conference Publication No. 414, IEE (1995).
[10] K. Krishnakumar and D. E. Goldberg, .Control System
Optimization Using Genetic Algorithms., Journal of Guidance, Control and Dynamics,Vol. 15, No. 3, pp. 735-740, 1992. [11] K Ogata, “Modern Control Systems”, University of Minnesota,
Prentice Hall, 1987.
[12] Grefenstette, “Optimization of control parameters for Genetic algorithms”. IEEE Trans on SMC, 1986, 16(1):122-128.
[13] Ziegler, J.G. and Nichols, N.B., “Optimum Settings for Automatic Controllers”, Trans. Amer. Soc. Mech. Eng., Vol. 64, pp. 759-768 (1942).