Munich Personal RePEc Archive
A geometrical approach to structural
change modeling
Stijepic, Denis
Fernuniversität in Hagen
9 October 2013
Online at
https://mpra.ub.uni-muenchen.de/55010/
A GEOMETRICAL APPROACH TO STRUCTURAL
CHANGE MODELING
Stijepic, Denis*
University of Hagen
This version: April 2014
Abstract: We propose a model for studying the dynamics of economic
structures. The model is based on qualitative information regarding structural
dynamics, in particular, (a) the information on the geometrical properties of
trajectories (and their domains) which are studied in structural change theory
and (b) the empirical information from stylized facts of structural change. We
show that structural change is path-dependent in this model and use this fact to
restrict the number of future structural change scenarios significantly. We
focus on labour-allocation-dynamics in a tree-sector-economy. However, our
approach can be applied to other types of structural change (e.g.
income-distribution-dynamics).
Keywords: structure, dynamics, qualitative, geometrical, simplex, path-dependency.
JEL-codes: C61, C69, D30, O14, O41.
1. INTRODUCTION
Many economic theories study the structure of the economy, e.g. the structure
of: GDP (break-down by types of expenditure/income), employment (labour
allocation across sectors), wages (wage distribution across agents) and income
(income distribution across households). Most of these theories study the
dynamics of this structure, i.e. structural change. In this paper we provide a
qualitative approach for studying structural change. We focus on the dynamics
of employment structure, i.e. dynamics of labour reallocation across sectors.
However, our approach can be applied to other structural change theories; see
Stijepic (2014a,b) for examples.
Recently, the dynamics of employment structure (in three-sector models) have
been analysed in many theoretical papers1. While these models feature specific
mathematical and economic assumptions, our qualitative model is very general
in this respect. It combines the information from empirical evidence (stylized
facts) and the information on the geometrical properties of typical trajectories
studied in structural change theory.2 We show that structural change is
path-dependent in our model and use this fact to reduce the number of future
structural change scenarios significantly.
The toolkit of the modern economist contains different tools for dynamic
analysis, e.g. vector auto regression, simulation and phase-diagram analysis.
Most of these tools combine theoretical and empirical information on the
subject of analysis for deriving some predictions regarding future dynamics or
policy responses. We do exactly the same. However, in contrast to many
quantitative and/or predominantly theoretical approaches we do not use
specific economic assumptions and, thus, do not follow specific economic
doctrines, but use the mathematical assumptions which are common to most
1
For example, Kongsamut et al. (2001), Meckl (2002), Ngai and Pissarides (2007), Acemoglu and Guerrieri (2008), Foellmi and Zweimueller (2008) and Buera and Kaboski (2009). 2
economic models. This idea results in a qualitative yet very general model of
structural change.
We approach as follows. First, we show that the dynamics of a three-sector
economy (agriculture, manufacturing, services) can be modelled on a
2-simplex; i.e. the 2-simplex is the domain of the structural change trajectory.
Second, we provide an economic interpretation of points and trajectories on
the 2-simplex. Third, we collect some information from widely-accepted
stylized facts of structural change and translate this information into dynamics
on the 2-simplex. Fourth, the structural change trajectories which arise in
structural change theory have some specific geometrical properties. In
particular, we use the fact that they are continuous and do not intersect
themselves (on the 2-simplex). Fifth, by combining the information from the
previous steps we obtain a qualitative meta-model of structural change. This
model implies that today’s structural change depends on past structural
change. That is, there is some sort of path-dependency in structural change.
Sixth, the path-dependency restricts the set of feasible future structural change
scenarios significantly. (For a summary of these scenarios see Section 9.) This
fact can be used in structural change predictions.
The rest of the paper is set up as follows. We show in Section 2 that structural
change in the three-sector-model can be depicted on a 2-simplex. In Section 3
we show how to interpret the points and trajectories on the 2-simplex. In
Section 4 we discuss briefly the stylized facts of labour allocation dynamics.
In Section 5 we present our model of structural change. In Section 6 we derive
the scenarios of structural change and show “path-dependency”. Section 7 is
devoted to a discussion of model assumptions. In Section 8 we show that most
structural change models assume implicitly continuous and
2. STRUCTURAL DYNAMICS AND STANDARD SIMPLEXES
Most aspects of the structure of an economy can be described by a set of
shares of an aggregate construct. This fact is illustrated in the following
examples. For a general discussion see Stijepic (2014a).
Example 1: If we are interested in the distribution of income across
households j =1,2,...h, we may study the shares of households j in aggregate
income y. That is, we study the system yj /y, j=1,2,...h, where yj is the
income of household j.
Example 2: Labour allocation across sectors. Assume that E is some measure
of aggregate employment (e.g. the number of hours worked in the whole
economy). Furthermore, let Ei denote the employment in sector i (e.g. hours
worked in sector i). The literature on labour allocation (cited in Section 1)
studies the dynamics of the system i:= Ei/E, i=1,2,...n, where n is the
number of sectors and i is the employment share of sector i.
We focus on Example 2. There are two facts which allow us to model labour
allocation (Example 2) on a standard simplex: (I) Standard structural change
literature (see Section 1) assumes that 1+2+...n =1. That is, all labour available is employed in sectors i=1,2,...n or, equivalently, E is the aggregate
of sectors i=1,...n, i.e. E:=E1+E2 +...En. This definition is not crucial for any result, since, if E≠E1 +...En, we can always define an auxiliary variable
1 +
n
E such that E=E1+...En+En+1 and study the dynamics of the system
E Ei i:= /
, i=1,...n+1. (II) The definitions i:=Ei/E, i=1,...n, and
n E E
These facts reduce the set of all feasible i drastically: the i are located on a
standard simplex of dimension (n-1).3 Let ∆(n−1) denote this simplex; thus,
} 1 ... ;
,... 1 , 0 : ) ,... , {(
: 1 2 1 2
) 1
( = ∈ ≥ = + + =
∆ n− n n i i n n
R .
In the main part of the paper we will study a lower-dimensional case of
Example 2, as defined in the following assumption.
ASSUMPTION 1: a) We study an economy divided into three sectors:
agriculture (a), manufacturing (m) and services (s). b) i denotes the share of
labour devoted to sector i, i=a,m,s. c) The employment shares i satisfy the
following relations:
(1) a+m+s =1
(2) 0≤i ≤1 for i=a,m,s.
According to the discussion above, the employment shares of the economy
defined in Assumption 1 are located on a subset of a two-dimensional standard
simplex (∆2), where ∆2 is given by the following definition:
(3) : {( , , ) 3: 0, , , ; 1}
2 = ∈ ≥ = + + =
∆ a m s R i i a m s a m s
where (a,m,s) is a vector of Cartesian coordinates indicating the labour
allocation and R is the set of real numbers.
In the remaining part of this section we recapitulate some standard geometrical
concepts for the analysis of the system defined in Assumption 1.
The simplex ∆2 is a triangle. In Figure 1 we depict ∆2 in a three-dimensional
Cartesian coordinate system with the coordinates (a,m,s).
3
Figure 1: The simplex ∆2 in the Cartesian coordinate system (a,m,s).
The vertices (A, M, S)and the origin (O) of the coordinate system in Figure 1
can be expressed in Cartesian coordinates (a,m,s) as follows:
(4) A:=(1,0,0)
(5) M :=(0,1,0)
(6) S:=(0,0,1)
(7) O:=(0,0,0)
Since the depiction in Figure 1 is inconvenient and unnecessary, we depict,
henceforth, ∆2 in the plane, as shown in Figure 2.
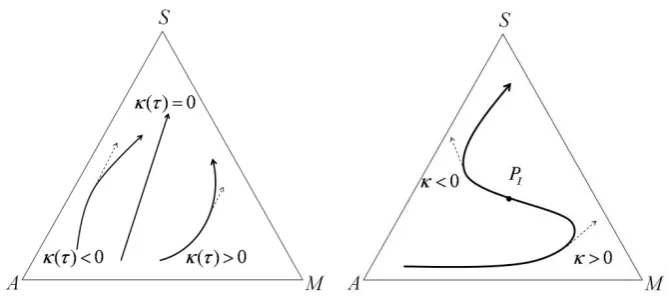
[image:7.595.113.268.586.720.2]Imagine a trajectory τ on ∆2 describing a movement from vertex A to vertex
S, cf. Figure 3. To abbreviate discussion, we define here the concept of
“signed curvature” (κ) of a trajectory in a very simple and somewhat
restrictive way; for a rigorous mathematical definition see any book on
introductory differential geometry. We say that the signed curvature of τ is
uniformly positive (κ(τ)>0), if the tangential vector is always on the
right-hand-side of τ ; i.e. τ describes a counter-clockwise movement. The signed
curvature of τ is uniformly negative (κ(τ)<0), if the tangential vector is
always on the left-hand-side of τ ; i.e. the movement described by τ is
clockwise. If the curvature of τ is uniformly zero (κ(τ)=0), then τ is an
oriented line-segment. These definitions imply that, if the curvature of τ is
[image:8.595.111.446.416.565.2]“uniform”, there are no inflection points on τ . See Figure 3.
Figure 3: Curvature of trajectories on ∆2 and an inflection pointPI .
3. INTERPRETATION OF POINTS AND TRAJECTORIES ON THE
2-SIMPLEX
In this section we elaborate the interpretation of points and vectors/trajectories
Remark 1: First, we turn to the interpretation of points on ∆2. (4)-(6) imply
that at the vertices A, M and S all labour is employed in agriculture,
manufacturing and services, respectively; cf. Figure 1. Thus, we define:
DEFINITION 1: a) An economy situated in vertex A of ∆2 is named “pure
agricultural economy”. b) An economy situated in vertex M of ∆2 is named
“pure manufacturing economy”. c) An economy situated in vertex S of ∆2 is
named “pure services economy”.
LEMMA 1: a) All points on the MS-edge of ∆2 feature a =0. b) All points
on the SA-edge of ∆2 feature m =0. c) All points on the AM -edge of ∆2
feature s =0. See also Figure 2.
PROOF: This property of the standard 2-simplex is well-known. For a proof
see APPENDIX A.
Remark 2: Thus, an economy situated on the MS-edge of ∆2 or moving
along this edge does not employ any labour in the agricultural sector.
Analogously, on the SA-edge labour is not employed in the manufacturing
sector and on the AM-edge labour is not employed in the services sector.
Remark 3: The following three lemmas show how a movement
(directional/tangential vector or trajectory) on ∆2 can be interpreted in terms
of sectoral employment share dynamics.
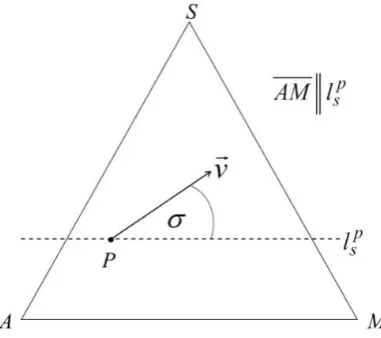
LEMMA 2: Assume that (I) P is an arbitrary point in the interior of ∆2, (II)
v is the directional vector associated with point P indicating the direction of
movement from point P along ∆2, (III) p s
parallel to the AM -edge of ∆2 and (V) σ is the angle between p s
l and v (in
point P); cf. Figure 4. Under these assumptions the following is true:
a) If 0°<σ <180°, the movement from P in direction indicated by v is
associated with an increase in s.
b) If 180°<σ <360°, the movement from P in direction indicated by v is
associated with a decrease in s.
c) If σ =180° or if σ =0°, the movement from P in direction indicated by v
is not associated with a change in s.
PROOF: This property of the standard simplex is well-known. For a proof see
[image:10.595.115.306.387.556.2]APPENDIX A.
Figure 4: A directional vector on ∆2 in relation to an AM-parallel ( p s l ).
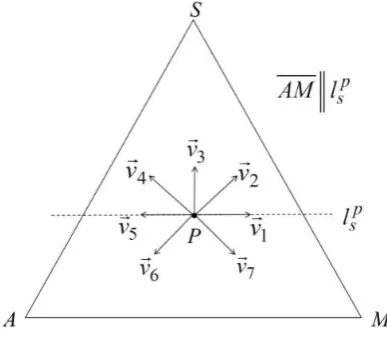
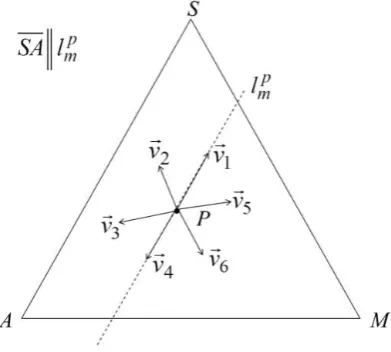
Remark 4: Figure 5 illustrates Lemma 2. The vectors v1 and v5 are parallel to
AM. Thus, a movement along these vectors is not associated with a change in
the service-share (s). Along vectors v2, v3 and v4 the service-share
increases. Along vectors v6 and v7 the service-share decreases. Overall, we
is associated with an increase/decrease in s: if all tangential vectors on this
segment have an angle between 0 and 180 degrees to the edge AM , we know
[image:11.595.113.307.232.401.2]that s increases steadily along this trajectory segment.
Figure 5: Representative vectors regarding s-changes.
LEMMA 3: Assume that (I) P is an arbitrary point in the interior of ∆2, (II)
v is the directional vector associated with point P indicating the direction of
movement from point P along ∆2, (III) p m
l is a line going through P, (IV) p m l is
parallel to the SA-edge of ∆2 and (V) µ is the angle between p m
l and v (in
point P); cf. Figure 6. Under these assumptions the following is true:
a) If 0°<µ <180°, the movement from P in direction indicated by v is
associated with a decrease in m.
b) If 180°<µ<360°, the movement from P in direction indicated by v is
associated with an increase in m.
c) If µ =180° or if µ =0°, the movement from P in direction indicated by v
is not associated with a change in m.
Figure 6: A directional vector on ∆2 in relation to a SA-parallel ( p m l ).
Remark 5: Figure 7 illustrates Lemma 3: movement along vectors v1 and v4
is not associated with a change in the manufacturing-share (m); m declines
along vectors v2 and v3; m increases along vectors v5 and v6.
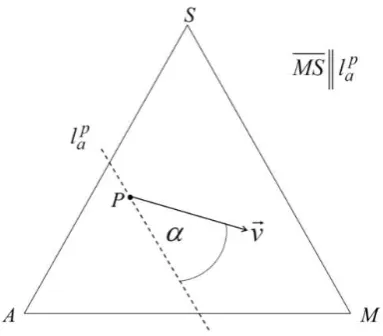
[image:12.595.115.311.487.663.2]LEMMA 4: Assume that (I) P is an arbitrary point in the interior of ∆2, (II)
v is the vector associated with point P indicating the direction of movement
from point P along ∆2, (III) p a
l is a line going through P, (IV) p a
l is parallel to
the MS-edge of ∆2 and (V) α is the angle between p a
l and v (in point P); cf.
Figure 8. Under these assumptions the following is true:
a) If 0°<α <180°, the movement from P in direction indicated by v is
associated with a decrease in a.
b) If 180°<α <360°, the movement from P in direction indicated by v is
associated with an increase in a.
c) If α =180° or if α =0°, the movement from P in direction indicated by v
is not associated with a change in a.
[image:13.595.113.305.432.600.2]PROOF: Analogous to the Proof of Lemma 2.
Figure 8: A directional vector on ∆2 in relation to a MS-parallel ( p a l ).
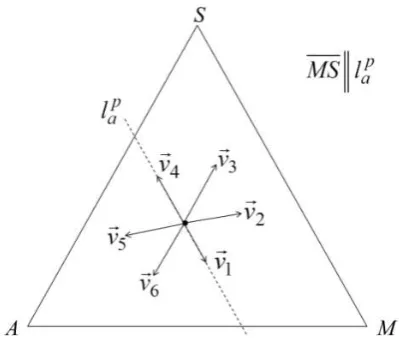
Remark 6: Figure 9 illustrates Lemma 4: movement along vectors v1 and v4
is not associated with a change in the agriculture-share (a); a declines
along vectors v2 and v3; a increases along vectors v5
Figure 9: Representative vectors regarding a-changes.
Remark 7: Lemmas 2-4 show how to interpret a movement (a directional
vector or trajectory) on ∆2. The angle set (α,µ,σ) associated with a
directional vector gives us all the necessary information about the structural
change associated with the movement along the vector.
Remark 8: The interpretation of directional vectors derived in this section
allows us to interpret trajectories on ∆2 directly, i.e. without analysis of
three-dimensional Cartesian coordinates of trajectories. That is, we can analyse
structural change as dynamics of a system on a bounded subset of the plane.
This allows us to benefit from the nice properties of such systems mentioned
in Section 1; cf., e.g., Guckenheimer and Holmes (1990), p.42f.
4. STYLIZED FACTS OF STRUCTURAL CHANGE
Theories of long-run labour reallocation across sectors have a long tradition in
economics. Some classical contributions are, for example: Clark (1940),
Baumol (1967) and Kuznets (1969). For a detailed review of structural change
Teixeira (2008). Most studies focus on a three-sector framework (agriculture,
manufacturing, services). Some newer empirical evidence on labour dynamics
in this framework is provided by Maddison (1989, 1995a,b, 2007), Kongsamut
et al. (2001) and Raiser et al. (2004). Some of this evidence is depicted in
APPENDIX F. Throughout the paper we will use the US-dynamics as an
[image:15.595.107.483.269.507.2]example (cf. Figure 10).
Figure 10: Past structural change dynamics in the USA (standard diagram).
Data source: Maddison, Angus (2007): Contours of the World Economy I-2030 AD, Essays in Macro-economic History, Oxford University-Press, New York, p.384
We use the following widely-accepted stylized facts in our model.
Stylized Fact 1: At early stages of development the economy is dominated by
agriculture (“agricultural economy”). This is one of the best known facts of
development economics. For evidence see any contribution on structural
change, e.g. Maddison (1989, 1995a,b, 2007), Kongsamut et al. (2001) and
Raiser et al. (2004). Figure 10 implies that 70% of labour has been employed
Stylized Fact 2: At later stages of development the economy is dominated by
services (“services economy”). “Later stages of development” refers here to
industrialized countries (e.g. OECD core-countries). For evidence on high
service-share in industrialized countries see e.g.: Schettkat and Yocarini
(2006), Maddison (1989, 1995a,b, 2007) and Raiser et al. (2004); see also the
figures in APPENDIX F. For example, Figure 10 implies that nearly 80% of
labour has been employed in the services sector in 2003 in the USA.
Stylized Fact 3 (Long-run trend): The employment share of agriculture
declines over the development process. See also Kongsamut et al. (2001). This
stylized fact is an implication of Stylized Facts 1 and 2. For evidence see e.g.:
the regression results presented by Kongsamut et al. (1997, 2001), the
evidence presented by Maddison (1989, 1995a,b, 2007), Figure 10 and the
figures in APPENDIX F.
Stylized Fact 4 (Long-run trend): The employment share of services grows
over the development process. See also Kongsamut et al. (2001). This stylized
fact is an implication of Stylized Facts 1 and 2. For evidence see e.g.: the
regression results presented by Kongsamut et al. (1997, 2001), the evidence
presented by Maddison (1989, 1995a,b, 2007), Figure 10 and the figures in
APPENDIX F.
These well-known and widely accepted stylized facts are necessary for our
results. For the sake of completeness, we add a further stylized fact, which is
not necessary for our results.
Stylized Fact 5 (optional): The employment share of manufacturing grows at
early stages of development (“industrialization”) and declines at later stages
of development (“tertiarisation”). This stylized fact implies that the curve
which describes the dynamics of manufacturing sector employment is
concave; cf. Figure 10. This result has been emphasized by Ngai and
Pissarides (2007). It may be questioned whether this stylized fact applies to all
countries. Furthermore, we are dealing here with long-run growth modelling;
could not find any trend in manufacturing employment share; therefore, they
postulate the following stylized fact:
Stylized Fact 5’ (optional): The manufacturing employment share is
“constant” over the development process.
Our model covers all these cases (Fact 5 and 5’): our results are consistent
with a inclining, declining, constant, concave or convex manufacturing-share
(curve).
Note that the dynamics depicted in the standard diagram (Figure 10) can be
translated into dynamics on ∆2 by using Lemmas 1-4; see also APPENDIX B.
5. A QUALITATIVE MODEL OF STRUCTURAL CHANGE
In this section we define a qualitative model which satisfies the stylized facts
postulated in Section 4. In the next section we use this model to elaborate
scenarios of future structural change.
ASSUMPTION 2: a) The dynamics of the sector structure (a,m,s) on ∆2
are described by the curve φ(t), t<t<t, t∈R, where: φ(t) is a coordinate
vector determining the position of the economy on ∆2 at time t; R is the set of
Real numbers. b) φ(t)∈∆2 for t<t <t . c) φ(t) is continuous (in t) on ∆2 for
t t t < < .
DEFINITION 2: a) φ(t0)=:P0 and φ(tT)=:PT, where t <t0 <tT <t .
b) τ :={φ(t)∈∆2 :t<t <t} is the trajectory on ∆2 describing the dynamics
of sector structure for t <t <t .
c) τ0T :={φ(t)∈∆2 :t0 ≤t ≤tT} is the segment of trajectory τ connecting the
points P and 0 PT.
e) τ0− :={φ(t)∈∆2 :t<t0} denotes the τ -segment preceding point P . 0
f)
T t t t T t ≤ ≤ = 0 ) ( : ]
[τ0 φ is the set of all points covered by trajectory-segment τ0T.
Remark 9: (i) Implicitly, we assume here some economic model which
generates a continuous trajectory (τ ) on ∆2, cf. Assumption 2 and Definition
2b. For discussion and examples of mathematical and economic models which
generate continuous trajectories of structural change see Section 8. (ii) We
partition the trajectory τ in segments, cf. Definition 2c-e. (iii) We assume the
existence of a continuous trajectory (cf. Assumption 2c), since we analyse
long-run structural change. It is hard to imagine that
sector-employment-shares jump (i.e. change non-marginally) at some point in time, since (a)
changes in sector-employment-shares require labour reallocation across
sectors and (b) significant numbers of workers cannot be reallocated instantly.
ASSUMPTION 3: Let the Cartesian coordinates of points P0 and PT (cf.
Definition 2a) be given as follows: P0 =(0a,0m,0s) and T ( )
T s T m T
a, ,
P = . The
trajectory segment τ0T satisfies the following qualitative requirements:
a) P is relatively close to vertex A, i.e. 0 0a >1/2; cf. Figure 2.
b) PT is relatively close to vertex S, i.e. T >1/2 s
; cf. Figure 2.
c) τ0T has uniform signed curvature (κ(τ0T)>0 or κ(τ0T)<0 or κ(τ0T)=0),
i.e. τ0T has no inflection points; cf. Section 2 and Figure 3.
d) The economy approaches PT monotonously along τ0T; i.e. all tangential
vectors on τ0T satisfy the following (vector-angle-)conditions: 0°≤σ ≤180°
Remark 10: Remember that Definition 2a/c implies that trajectory-segment
T
0
τ describes a movement from point P0 to point PT; the economy is in P0 at
time t0 and in PT at time tT. Thus, Assumption 3 can be explained as follows:
a) Assumption 3a is due to Stylized Fact 1. Stylized Fact 1 states that
agriculture is dominant at the beginning of the development process (t0); cf.
Section 4. Assumption 3a implies that more than 50% of labour is employed in
the agricultural sector at t0; thus, Stylized Fact 1 is satisfied. Note that Lemma
4b implies: the closer a point to vertex A, the greater the employment share of
agriculture (a); cf. Remark 6.
b) Assumption 3b is due to Stylized Fact 2. Stylized Fact 2 states that the
services sector is dominant at later stages of development (tT); cf. Section 4.
Assumption 3b implies that more than 50% of labour is employed in the
services sector at tT; thus, Stylized Fact 2 is satisfied. Note that Lemma 2a
implies: the closer a point to vertex S, the greater the employment share of
services (s); cf. Remark 4. We discuss Assumption 3b in Section 7.1 as well.
c) Assumption 3c follows from our growth-theoretical approach to structural
change; cf. Section 4. We are interested in long-run trends not fluctuations.
Thus, in general, the assumption of a linear trajectory (κ(τ0T)=0) is
sufficient for our analysis; for example, the stylized facts and the model
elaborated by Kongsamut et al. (2001) imply a linear trajectory of structural
change on ∆2. We allow for uniformly positive (κ(τ0T)>0) and uniformly
negative (κ(τ0T)<0) signed curvature of τ0T for reasons of generality. If τ0T
had one or many inflection points in reality, its trend could be approximated
by a trajectory with uniform signed curvature; see also the discussion of
Stylized Fact 5 in Section 4. Furthermore, our results remain valid, if there are
inflection points, provided that τ0T does not feature strong fluctuations; we
d) Assumption 3d is due to Stylized Facts 3 and 4. Stylized Facts 3 and 4 refer
to long-run trends and state that services employment share (s) increases
over the development process and agricultural employment share (a)
decreases over the development process. Assumption 3d (and Assumption
3a/b) implies that s increases monotonously over time (0°≤σ ≤180°, cf.
Lemma 2 and Figure 4) and a decreases monotonously over time
° ≤ ≤
° 180
0
( α , cf. Lemma 4 and Figure 8). The assumption of monotonous
dynamics is due to the fact that we analyse here long-run trends; cf. Remark
10c. In Section 7 we show that this assumption is not necessary for our results.
LEMMA 5: If Assumptions 1-3 are satisfied, the dynamics described by
trajectory-segment τ0T are consistent with Stylized Facts 1-4 (cf. Section 4).
PROOF: For a proof of Lemma 5, see Remark 10a/b/d.
ASSUMPTION 4: The trajectory τ does not intersect itself. In particular,
] [ ) (t τ0T
φ ∉ for t>tT (cf. Definition 2f).
Remark 11: Assumption 4 implies that the economy never returns to a state in
which it has been previously. This assumption is widespread in structural
change analysis and in mathematical literature. We discuss it in Section 8.
Remark 12: Assumption 4 does not allow for closed trajectories. A closed
trajectory (or: closed orbit) in the plane is a Jordan curve. For example, the
circle is a Jordan curve. The economy moving along such a closed trajectory
repeats the cycle (infinitely) many times. Thus, if an economy satisfies
Assumption 1-3 and moves along a closed trajectory, at some point in time
T t
t> the economy enters the set [τ0T] and moves along it (from point P0 to
also APPENDIX C and D. On closed trajectories, see any introductory book
on differential equation systems.
DEFINITION 3: a) An economy situated in point ( , , ps)
p m p a
P= at time
T D t
t > “has undergone a process of relative deindustrialization since t ”, if T
there exists a point T T
s T m T a T , ,
P0 =(0 0 0 )∈τ0 such that T s p s
0
= and
. 0T m p m
< b) An economy situated in point ( , , p)
s p m p a
P= at time tI >tT
“has undergone a process of relative industrialization since t ”, if there T
exists a point T T
s T m T a T , ,
P0 =(0 0 0 )∈τ0 such that T s p s
0
= and T
m p m
0
> .
Remark 13: a) If we want to know whether an economy at time tD >tT “has
undergone a process of relative deindustrialization since tT”, we have to do
the following. First, find data on services employment share ( p s
) at time
T D t
t > . Second, find a data-point (P0T) in the past – exactly speaking, in the
period [t0,tT] – which satisfies T s p s
0
= , i.e. the services share associated
with P0T is equal to the services share at tD. Third, compare the
manufacturing employment share associated with P0T to the manufacturing
employment share at tD. If 0T
m p m
< , then the economy “has undergone a
process of relative deindustrialization since tT”. b) Definition 3b implies that
the concept of “relative industrialization” is antipodal to the concept of
“relative deindustrialization”: while “relative deindustrialization” implies that
today’s manufacturing-share is relatively small, “relative industrialization”
implies that today’s manufacturing-share is relatively great. c) Remarks 13a/b
imply that the concept of “relative (de)industrialization” (Definition 3) is
based on comparing the today’s share to the
“comparable” to today’s situation if the service-share in the past situation is
equal to today’s service-share.
DEFINITION 4: Let the Cartesian coordinates of points P0 and PT (cf.
Definition 2a) be given as follows: P0 =(0a,0m,0s) and ( ) T s T m T a T , , P = .
Furthermore, let the Cartesian coordinates of a point P0T∈[τ0T] be given as
follows: 0 ( 0 0 0 ) T s T m T a T , ,
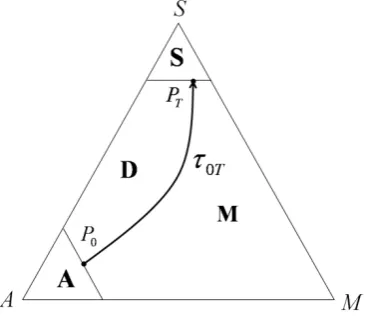
P = . We define the following partitions of ∆2 (cf.
Figure 11):
(8) A:={(a,m,s)∈∆2 :a ≥0a}
(9) : {( , , ) 2 : }
T s s s
m
a
∈∆ ≥
=
S
(10) D:=L∩(∆2\(A∪S))
(11) M:=∆2\(A∪S∪D∪[τ0T])
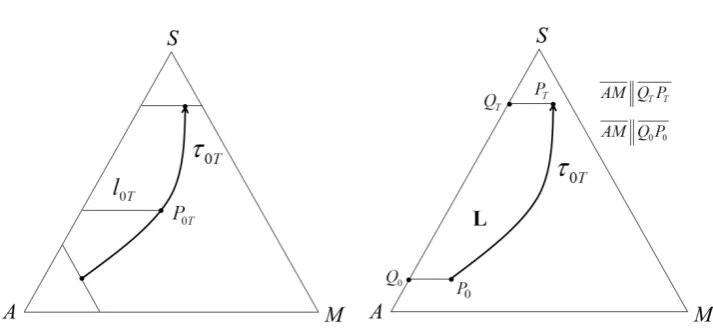
where L is given by 0 : {( , , ) 2 : 0 , 0 }
T m m T s s s m a T
l = ∈∆ = < and
]} [ :
{
: 0 0 0
p T T T P τ
l ∈
=
[image:22.595.115.299.489.648.2]L .
Figure 11: A partitioning of ∆2 according to Definition 4.
Remark 14: a) For an explanation of partitions A and S see (Proof of) Lemma
follow from Definition 4 and Lemmas 4 and 2. b) The explanation of partition
D is a little bit more complicated. Imagine an arbitrary point
) ( 0 0 0 0 T s T m T a T , ,
P = on the trajectory τ0T. The set of all points (a,m,s) on
2
∆ which satisfy T
s s
0
= and T
m m
0
< is given by {(a,m,s)∈∆2 :
T T m m T s
s , l0
0 0
}≡
<
=
. The basic knowledge of calculus implies that (cf.
Figure 12): l0T is a line-segment on ∆2; l0T is parallel to the AM -edge of
2
∆ (cf. Lemma 2c and Figures 4); l0T is bounded on the right-hand side by
the point P0T and on the left-hand side by the AS-edge of ∆2 (cf. Lemma
3a/c). Thus, l0T is the set of all points on ∆2 which are situated on the
left-hand side of point P0T; cf. Figure 12. If we do this procedure with every point
on τ0T and join all the line-segments l0T which are created by this procedure,
we obtain the set L:={l0T :P0T ∈[τ0T]}; cf. Figure 12. D is given by
2 ( :=L∩ ∆
D \(A∪S)), cf. Definition 4. For economic interpretation of
partition D see (Proof of) Lemma 6. c) The partition M is the part of ∆2 which
is not assigned to the other partitions (A, S, D, [τ0T]). It contains all the points
which are on the right-hand side of τ0T. The proof of this fact is analogous to
[image:23.595.113.470.556.721.2]the proof in Remark 14b.
DEFINITION 5: a) In an “agricultural economy” the greatest share of
labour is employed in the agricultural sector, i.e. a >1/2. b) In a
“manufacturing economy” the greatest share of labour is employed in the
manufacturing sector, i.e. m >1/2. c) In a “services economy” the greatest
share of labour is employed in the services sector, i.e. s >1/2.
LEMMA 6: a) An economy situated in partition A is an agricultural economy
(cf. Definition 5a). b) An economy situated in partition S is a “services
economy” (cf. Definition 5c). c) An economy situated in partition D “has
undergone a process of relative deindustrialization since tT” (cf. Definition
3a). d) Partition M contains all the points which satisfy Definition 3b
(“relative industrialization”).
PROOF: a) Definition 4 and Assumption 3a imply that all points in partition
A satisfy the following inequality: a ≥0a >1/2. This fact implies Lemma
6a; cf. Definition 5a. b) Definition 4 and Assumption 3b imply that all points
in S satisfy the following condition: T 1/2 s s ≥ >
. This fact implies Lemma
6b; cf. Definition 5c. c) The definition of l0T (cf. Definition 4) implies that all
points which belong to l0T satisfy Definition 3a, i.e. if an economy is situated
on l0T, then the economy “has undergone a process of relative
deindustrialization since tT”. (Note that l0T exists only for t>tT; cf.
Definition 4). Definition 4 implies that L consists of such line-segments, i.e.
line-segments which satisfy Definition 3a. Thus, L satisfies Definition 3a as
well. D is a subset of L. Thus, D satisfies Definition 3a. That is, an economy
situated in partition D “has undergone a process of relative deindustrialization
since tT”; cf. Definition 3a, which proves Lemma 6c. d) The proof of Lemma
6d is analogous to the proof of Lemma 6c. Note, however, that M does not
only contain points which satisfy Definition 3b but also points which do not
they are not “comparable” (cf. Remark 13c). We omit the discussion of this
fact, since it has no relevance for our results.
LEMMA 7: Assume an economy which satisfies Assumptions 1-4. Let this
economy be situated in partition S at time t , i.e. S φ(tS)∈S, where tT ≤tS <t .
If this economy leaves S, then it must enter D or M. That is: if φ(t)∉S for
x S t t
t < < , then either φ(t)∈D for tS <t<tD≤tx or φ(t)∈M for
x M S t t t
t < < ≤ , where tx >tS, tD >tS and tM >tS are points in time.
PROOF: Note that Definition 4 implies that S is a closed set; thus, (i) the
boundary between S and M belongs to S and (ii) the boundary between S and
D belongs to S; cf. Figure 11. The proof of Lemma 7 can be divided into the
following parts.
LEMMA 8: If φ(t)∉S, then φ(t)∈A∪M∪D∪int([τ0T]). PROOF:
Definition 4, which defines a partitioning of ∆2, and Assumption 2b imply
Lemma 8. See also Definition 2f. ◊
In the following we discuss which of the partitions (A, M, D, int([τ0T])) the
economy can enter at the instant at which it leaves S.
LEMMA 9: Let Z denote a partition of ∆2, i.e. Z∈{A,M,D,S,int([τ0T])}.
Assume that Z and S are separated. Then the following is true: if φ(ty)∈S
then φ(tz)∉Z for tz →ty, where tz >ty. PROOF: Two sets X⊂∆2 and Y
2
∆
⊂ are separated if X*∩Y=X∩Y*=∅, where X* is the closure of X and
Y* is the closure of Y; see e.g. Flegg (1974), p.163f. Thus, Lemma 9 is
implied by the fact that φ(t) is continuous (cf. Assumption 2c) and S and Z
are separated. The economy cannot “jump” from S to Z, since a “jump”
contradicts the continuity assumption. ◊
LEMMA 10: Partitions S and A are separated. PROOF: Lemma 9 is implied
by Definition 4 and Assumption 3a/b. In particular, the fact that Assumption
implies that partitions S and A are separated by a non-empty set
) ]) int([
(D∪ τ0T ∪M ; cf. Definition 4 and Figure 11. This vague statement
can be specified as follows. If 0a >1/2 and >1/2 T
s
(cf. Assumptions 3a/b)
S and A are separated, as shown in the following proof. If S and A are not
separated then there must exist a point P=(lap,lmp,lsp)∈∆2 which satisfies (i)
∈
P A* and P∈S or (ii) P∈A and P∈S*; cf. Proof of Lemma 9. (8) and (9)
imply that in the cases (i) and (ii) the following is true: 0
a p a l
l ≥ and T
s p s l l ≥ .
Thus, since we assume 0a >1/2 and >1/2 T
s
, the following is true: pa >1/2
and ps >1/2 and, thus, + >1 p s p a l
. This contradicts (1). Thus, S and A are
separated if 0a >1/2 and >1/2 T
s
. ◊
LEMMA 11: In general, (i) S and M are not separated and (ii) S and D are
not separated. PROOF: Lemma 11 is implied by Definition 4 and Assumption
3; cf. Figure 11. For the case where S is separated from M and D see the
discussion at the end of this proof. ◊
LEMMA 12: φ(t)∉int([τ0T]) for t >tS. PROOF: Lemma 12 is implied by the
fact that tS ≥tT (as assumed in Lemma 7) and by Assumption 4. ◊
LEMMA 13: Assume that S is not separated from M and/or D. Then the
following is true: if φ(tS)∈S and φ(tz)∉S then φ(tz)∈M or φ(tz)∈D for
S z t
t → , where tz >tS. PROOF: This lemma is implied by Lemmas 8-12. ◊
Lemma 13 completes the proof of Lemma 7. Note that, if S is separated from
M and D, the economy cannot leave S (due to Assumption 2c) and, thus, stays
in S. In this case the premise of Lemma 7 (“...if φ(t)∉S for tS <t<tx...”) is
not satisfied. That is, this case is not relevant for Lemma 7. Furthermore, note
that Lemma 7 would hold, even if we allowed that τ is a closed trajectory (cf.
6. MODELL-PREDICTIONS OF STRUCTURAL CHANGE
We will assume now that t0 corresponds to a point in time in the early history
of an industrialized country (e.g. the year 1820 in the history of the USA; cf.
Figure 10). Furthermore, we assume that tT corresponds to now. Thus, the
trajectory-segment τ0T corresponds to the past structural change (in the USA)
and the trajectory-segment τT+ corresponds to the future structural change (in
the USA). We translate now the properties of τT+ into structural change
scenarios. First, we show that there are three scenarios of future development.
Then, we discuss how these scenarios can be continued.
LEMMA 14: The economy which satisfies Assumptions 1-4 is situated in
partition S at time tT.
PROOF: Definition 2a implies that the economy is in point PT at time tT.
Definition 4 implies that the point PT is located in partition S.
THEOREM 1: Assume an economy which satisfies Assumptions 1-4. Let this
economy be situated in partition S at time t=tT, i.e. φ(tT)∈S (cf. Lemma
14). There are only three alternative scenarios regarding the development of
this economy in the future (t >tT):
Scenario I: The economy stays in S for t >tT, i.e.
φ
(t)∈S for t >tT; cf.Figure 13.
Scenario II: At some point in time tSD >tT the economy departs from S and
enters D. That is,
φ
(t)∈S for tT <t ≤tSD andφ
(t)∈D for tSD <t <tx,where tx >tSD is some point in time. See also Figure 14.
Scenario III: At some point in time tSM >tT the economy departs from S and
enters M. That is,
φ
(t)∈S for tT <t ≤tSM andφ
(t)∈M for tSM <t <ty,PROOF: The economy being in S can stay in S forever. This outcome is
possible if, for example, the economy converges to a fixed point in S. If the
economy does not stay in S, i.e. if the economy leaves S, the economy must
enter D or M; cf. Lemma 7. Note that Definition 4 implies that S is a closed
set; thus, (i) the boundary between S and M belongs to S and (ii) the boundary
between S and D belongs to S.
[image:28.595.109.300.282.679.2]Figure 13: Scenario I.
Figure 15: Scenario III.
Remark 15: Of course, when the economy is in D (Scenario II) or in M
(Scenario III), it can move further to A or go back to S. These “secondary
steps” (sub-scenarios) will be discussed later.
COROLLARY 1 (Economic Interpretation of Theorem 1): Assume an
economy which (a) satisfies Assumptions 1-4 and (b) is dominated by the
services sector today. Then, there are only three alternative scenarios
regarding future development of this economy. (I) The economy remains a
“services economy” forever (cf. Definition 5c). (II) At some future point in
time the economy starts a process of “relative deindustrialization” (cf.
Definition 3a). (III) At some future point in time the economy starts a process
of “relative industrialization” (cf. Definition 3b).
PROOF: a) Theorem 1 postulates that in Scenario I the economy stays in S
forever. Lemma 6b shows that the economy situated in S is a services
economy. b) Theorem 1 postulates that in Scenario II the economy enters D.
Lemma 6c implies that the economy situated in partition D “has undergone a
process of relative deindustrialization since tT” (cf. Definition 3a). c) Theorem
the economy situated in partition M “has undergone a process of relative
industrialization since tT” (cf. Definition 3b).
Remark 16: a) In Scenario I the service-share (s) does not fall below its
today’s level, i.e. s ≥Ts for t>tT. b) Scenario I implies that there is some
fixed point or limit cycle in S; cf. Stijepic (2014a), “Theorem 1”, on the
limit-properties of trajectories satisfying Assumptions 1-4. c) The structural change
models discussed in Section 1 predict Scenario I (fixed point).
Remark 17: Scenario II implies that at some future point in time the
service-share (s) starts shrinking (cf. Definition 4, Lemma 2b and Figure 14) while
the manufacturing sector remains below “comparable” past levels; cf.
Definition 3a and Remark 13c.
Remark 18: Scenario III implies that at some future point in time the
service-share (s) starts shrinking (cf. Definition 4, Lemma 2b and Figure 15) while
the manufacturing sector remains above “comparable” past levels; cf.
Definition 3b and Remark 13c.
Remark 19: Now we turn to the secondary steps (sub-scenarios), i.e. we
analyse what happens after the economy has entered partition D or M. Of
course, the economy can stay in one of these partitions (if there is a fixed point
or limit cycle). In this case, the economy remains relatively (de)industrialized
forever. In the following we discuss what happens if the economy departs
from partitions D and M.
THEOREM 2 (Continuation of Scenario II): Assume an economy which
satisfies Assumptions 1-4. Furthermore, let this economy be situated in
leaves D at time t , then it enters x A or S at t , where x tD<tx<t. That is: if
D
∈
) (t
φ for tD ≤t<tx and φ(tx)∉D, then either φ(tx)∈A or φ(tx)∈S.
PROOF: See Figure 11. Note that Definition 4 implies that S and A are closed
sets; thus, (i) the boundary between S and D belongs to S and (ii) the boundary
between A and D belongs to A. The proof of Theorem 2 is analogous to the
Proof of Lemma 7. The proof can be divided into following parts.
LEMMA 15: If φ(t)∉D, then φ(t)∈A∪M∪S∪int([τ0T]). PROOF:
Lemma 15 is implied by Definition 4, which defines a partitioning of ∆2, and
Assumption 2b. See Definition 2f. ◊
In the following we discuss which of the partitions (A, M, S, int([τ0T])) the
economy can enter at the instant at which it leaves D.
LEMMA 16: Partitions D and M are separated. In particular, D and M are
separated by [τ0T]. PROOF: Lemma 16 is implied by Definition 4. As
discussed in Remark 14b/c: D contains all the points on the left-hand side of
; 0T
τ M contains all the points on the right-hand side of τ0T. For a definition
of “separated”, see Proof of Lemma 9. ◊
LEMMA 17: If φ(t)∈D for tD ≤t<tx, then φ(tx)∉M. PROOF: Lemma 17
is implied by the fact that D and M are separated (cf. Lemma 16) and φ(t) is
continuous (cf. Assumption 2c). The “jump” from D to M violates the
continuity assumption of φ(t); cf. (Proof of) Lemma 9. ◊
LEMMA 18: In general, D is not separated from S and A. PROOF: Lemma 18
is implied by Definition 4 and Assumption 3. For a discussion of the case in
which D is separated from S and A, see the end of this proof.◊
LEMMA 19: If φ(t)∈D for tD ≤t<tx, then φ(tx)∉int([τ0T]). PROOF:
Lemma 19 is implied by the fact that tx >tD >tT (as assumed in Theorem 2)
and by Assumption 4. ◊
LEMMA 20: Assume that D is not separated from S and/or A. Then, the
A
∈
) (tx
φ or φ(tx)∈S. PROOF: This lemma is implied by Lemmas 15 and
17-19. ◊
Lemma 20 proves Theorem 2. Note that, if D is separated from S and A, the
economy must stay in D. Thus, the premise Theorem 2 (“...if… ( x)∉D
p t
φ ...”)
is not satisfied. That is, this case is not relevant for Theorem 2. Furthermore,
note that Theorem 2 would hold, even if we allowed that τ is a closed
trajectory (cf. Remark 12); see APPENDIX D for a proof.
COROLLARY 2 (Economic Interpretation of Theorem 2): Assume that an
economy is “relatively deindustrialized” (cf. Definition 3a) at time tD
(Scenario II), where tD >tT (cf. Definition 2a). A necessary condition among
others for entering a path of relative industrialization (cf. Definition 3b) and
becoming a (pure) manufacturing economy (cf. Definition 1b) at some point in
time tM >tD is that prior to that (i.e. at some point in time tx <tM) the
economy becomes an agricultural economy (cf. Definition 5a) or a services
economy (cf. Definition 5c) (where tx >tD).
PROOF: PART 1: Corollary 2 refers to an economy which is situated in
partition D; cf. Lemma 6c. Definition 4 and Assumption 3 imply that M
contains vertex M and some neighbourhood of vertex M; cf. Figure 11. In
particular, Assumption 3c ensures that τ0T does not contain vertex M; thus, M
contains the vertex M and some (eventually small) neighbourhood of vertex
M. Thus, if the economy cannot reach any point in M, it cannot reach M (and
some, potentially small, neighbourhood of M), and, thus, the economy cannot
become a (pure) manufacturing economy; cf. Definition 1b. Lemma 6a (6b)
implies that an economy situated in A (S) is a(n) agricultural economy
(services economy); cf. Definition 5a (5c). Furthermore, Lemma 6c implies
that an economy situated in M has entered a path of “relative industrialization”
PART 2: As Theorem 2 shows, the economy, which is situated in partition D,
cannot reach any point in M, unless the economy traverses S or A. Definition
4 implies that, in general, S and A are not separated from M; for a definition
of “separated”, see Proof of Lemma 9. Thus, in general, an economy which is
in S or A can enter M at the next instant.
PART 3: However, this is not always guaranteed; i.e. even if the economy
enters A or S, it may not always be possible that the economy can go from
there to M, as shown in the following example. Assume that the economy
which moves along τ satisfies Assumption 4. Furthermore, assume that τ0−
(cf. Definition 2e) touches the boundary of ∆2 somewhere in A. Under these
conditions, trajectory-segment τT+ ⊂τ cannot go from D to M via A, since
on this way it intersects the trajectory-segment τ0− ⊂τ . Assumption 4
prohibits self-intersections of τ . See also Figure 16.
PART 4: The following example demonstrates that an economy which is
situated in D may not be able to enter S or A. Assume that PT =S (cf. (6) and
Definition 2a); i.e. the trajectory-segment τ0T ends in vertex S. In this case
T T P S = ⊂τ0
=
S ; cf. Definition 4. Thus, the trajectory-segment τT+ cannot
enter S, since in this way it violates Assumption 4. A similar example can be
constructed to show that in some cases τT+ cannot enter A.
PART 5:For the reasons postulated in Parts 3 and 4 of this proof, Corollary 2
contains the formulation “…A necessary condition among others…”. That is,
when the economy is situated in D, traversing S or A is one necessary
conditions among many necessary conditions for entering M.
Figure 16: A case in which the way from D to M via A is not possible.
COROLLARY 3 (Economic Interpretation of Theorem 2): Assume that an
economy is “relatively deindustrialized” (cf. Definition 3a) at time tD
(Scenario II), where tD >tT (cf. Definition 2a). A necessary condition among
others for entering a path of “relative industrialization” (cf. Definition 3b)
and becoming a (pure) manufacturing economy (cf. Definition 1b) at some
point in time tM >tD is that prior to that (i.e. at some point in time tx <tM)
the agriculture-share a grows beyond 0
a
(cf. Definition 4) or the
service-share s grows beyond T s
(cf. Definition 4) (where tx >tD).
PROOF: The proof of Corollary 3 consists of the following parts.
LEMMA 21: If the economy moves along τT+ from D to M, then the economy
muss cross the interior of the line-segment AP , or vertex A, or the interior of 0
the line-segment PTS, or vertex S. PROOF: P0∈∆2, PT ∈∆2 and [τ0T]⊂∆2;
cf. Definition 2. P0 is closer to vertex A than PT is; PT is closer to vertex S
than P0 is; cf. Assumption 3a/b. P0 and PT are connected by the interior of
]
[τ0T ; cf. Definition 2a/c/f. These facts imply that vertex A and vertex S are
S. c∆ is a one-dimensional connected subset of ∆2. It separates ∆2 into two
disjoint parts: the left-hand side and the right-hand side. D is on the left-hand
side (of [τ0T]); M is on the right-hand side (of [τ0T]); cf. Definition 4 and
Remark 14 b/c. Thus, if the economy moves from D to M (along a continuous
trajectory) it must cross the curve c∆. τT+ is continuous on ∆2; cf.
Assumption 2c and Definition 2d. The economy which moves along τT+
cannot cross [τ0T]⊂c∆; cf. Assumption 4. Thus, the economy which moves
along τT+ from D to M must cross A∪int(AP0) or int(PTS)∪S. Remember
that [τ0T]=P0 ∪int([τ0T])∪PT; cf. Definition 2a/c/f. ◊
LEMMA 22: If the economy, which moves from D to M along τT+, crosses the
line-segment A∪int(AP0) at time ta, then 0
a a
> at time t . If the economy, a
which moves from D to M along τT+, crosses the line-segment int(PTS)∪S at
time t , then s
T s s
> at time t .s PROOF: If the economy moves from P0
towards vertex A, a grows; cf. Lemma 4. Thus, the economy situated in
) int(AP0
A∪ features a greater a than the economy situated in point P0. If
the economy moves from PT towards vertex S, s grows; cf. Lemma 2. Thus,
the economy situated in int(PTS)∪S features a greater s than the economy
situated in point PT. ( 0, 0 , 0) 0 a m s
P = and ( T)
s T
m T a T , ,
P = ; cf. Definition 4. ◊
As shown in the Proof of Corollary 1, M contains all the points which feature
“relative industrialization” and “pure manufacturing economy”. Corollary 3
refers to an economy which is situated in partition D at time tD; cf. Lemma
6c. Corollary 3 refers to an economy which moves along trajectory-segment
+
T
τ , since Corollary 3 refers to tD >tT; cf. Definition 2d. These facts and
THEOREM 3 (Continuation of Scenario III): Assume an economy which
satisfies Assumptions 1-4. Furthermore, let this economy be situated in
partition M at time tM, i.e. φ(tM)∈M, where tT <tM <t. If this economy
leaves M at time t , then it enters x A or S at t , where x tM <tx <t . That is: if
M
∈
) (t
φ for tM ≤t<tx and φ(tx)∉M, then either φ(tx)∈A or φ(tx)∈S.
PROOF: The proof is analogous to the proof of Theorem 2.
COROLLARY 4 (Economic Interpretation of Theorem 3): Assume that an
economy is “relatively industrialized” (cf. Definition 3b) at time tM (Scenario
III), where tM >tT. A necessary condition among others for entering a path of
relative deindustrialization (cf. Definition 3a) at some point in time tD >tM is
that prior to that (i.e. at some point in time tx <tD) the economy becomes an
agricultural economy (cf. Definition 5a) or a services economy (cf. Definition
5c) (where tM <tx).
PROOF: Note that this time the economy is situated in partition M and
Corollary 4 is about entering partition D. The rest of the proof is obvious,
since analogous to the proof of Corollary 2.
COROLLARY 5 (Economic Interpretation of Theorem 3): Assume that an
economy is “relatively industrialized” (cf. Definition 3b) at time tM (Scenario
III), where tM >tT. A necessary condition among others for entering a path of
relative deindustrialization (cf. Definition 3a) at some point in time tD >tM is
that prior to that (i.e. at some point in time tx <tD) the agriculture-share a
grows beyond 0
a
(cf. Definition 4) or the service-share s grows beyond T s
(cf. Definition 4) (where tx >tM).
PROOF: Note that this time the economy is situated in partition M and
Corollary 5 is about entering partition D. The rest of the proof is obvious,