c
World Scientific Publishing Company
STABILITY OF OBSERVER-BASED CHAOTIC
COMMUNICATIONS FOR A CLASS OF
LUR’E SYSTEMS
JOSE ALVAREZ-RAMIREZ∗ and HECTOR PUEBLA
Division de Ciencias Basicas e Ingenieria, Universidad Autonoma Metropolitana-Iztapalapa, Apartado Postal 55-534, Mexico D.F., 09340 Mexico
ILSE CERVANTES†
Seccion de Estudios de Posgrado e Investigacion, ESIME-Culhuacan, Av. Santa Ana 1000 Col. San Francisco
Culhuacan, 04430, Mexico D.F., Mexico [email protected]
Received April 9, 2001; Revised August 17, 2001
In this paper, the stability of observer-based chaotic communications using Lur’e systems is presented. In this approach, the transmitter contains a chaotic oscillator with an input that is modulated by the information signal. The receiver is composed by a copy of the transmitter driven by a synchronization signal. Some effects of transmission noise on the demodulation procedure are discussed. Numerical simulations on Chua’s circuit are provided to illustrate our findings.
Keywords: Chaotic communications; observer-based; transmission noise; Chua’s circuit.
1. Introduction
Since Pecora and Carroll’s seminal paper [1990], synchronization of chaotic systems has found important applications in engineering. The under-lying idea is that a drive signal from a chaotic system could be used to synchronize a second chaotic system. Communication is one of the important applications of chaos synchronization (see e.g. [Cuomo & Oppenheim, 1993; Carroll & Pecora, 1993; Kocarev et al., 1992]). Chaos is sensitive to system parameters and has broadband frequency characteristics, so it is used for spread spectrum communication [Cuomo & Oppenheim, 1993; Carroll & Pecora, 1993].
Methods of chaos communication can be clas-sified into the following basic categories: (a) chaos masking (CMa) [Kocarev et al., 1992; Short, 1994] where the basic idea is to hide the original in-formation or the message inside a chaotic signal by direct addition; (b) chaos modulation (CMo) [Halle et al., 1993; Heidari-Bateni et al., 1992; Wu & Chua, 1994; Frey, 1993; Feldmann et al., 1996] where the information signal is injected into a chaotic system that acts as a nonlinear filter, and (c) chaos shift keying (CSK) [Ogorzalek, 1993; Parlitz et al., 1992; Parlitz & Ergezinger, 1994] where binary signals are mapped into two kinds of steady states of two chaotic systems coupled in
†Author for correspondence.
master-slave configuration. In all cases, the original information signal is recovered if the dynamics of the transmitter and receiver chaotic systems are synchronized by the transmitted (drive) signal. CMa and CMo approaches are used for analog com-munication and CSK for digital comcom-munication. In the sequel, we will focus on analog communication systems.
A drawback of CMa approaches is that they require that synchronization is not affected by the perturbation of the synchronizing drive sig-nal. Consequently, for CMa procedures, the syn-chronization alone is not always sufficient since the added information signal or message has the effects of a perturbation injected by the drive signal into the receiver (a detailed study of the influence of signal and message powers on the masking process is given in [Cuomo & Oppenheim, 1993]. This is a serious drawback of CMa procedures because the power of the original information signals is lim-ited [Cuomo & Oppenheim, 1993]. Moreover, it is well known that noise in the communication chan-nel may limit seriously the quality of the recovered signal [Corron & Hahs, 1997].
Due to the fact that CMa procedures cannot exactly recover the transmitted information signal, schemes based on CMo methods (see e.g. [Heidari-Bateni et al., 1992; Wu & Chua, 1994; Frey, 1993; Feldmann et al., 1996]) have been proposed. In CMo procedures, the information signal is stored in a bifurcation parameter of the chaotic dynamical system. By keeping the variation of this bifurca-tion parameter in the chaotic regime, the output wideband signal of the dynamical system may be used as the transmitted signal. In this way, the chaotic system can be interpreted as a nonlinear filter acting on the information signal. The CMo technique needs a receiver/demodulator which, in principle, can estimate the information signal ac-curately by inverting the chaotic (nonlinear filter) transmitter. Recently, several demodulation proce-dures have been proposed to approximate the exact inverse of the transmitter. Oksasoglu and Akgul [1997] proposed a linear inverse for a class of nonau-tonomous second-order chaotic systems. At the receiving end, the information signal is recovered through some simple signal processing operations including differentiation of the transmitted chaotic signal. It is well known that differentiation mag-nifies errors due to noise in the transmission chan-nel. Moreover, although the resulting demodulation procedure is linear, it may require the transmission
of more than one signal, thus resulting in a more ex-pensive more-than-one channel transmission. Itoh et al. [1997] proposed an approach based on Takens’ Theorem where, as in [Oksasoglu & Akgul, 1997], the idea is to recover the information signal via differentiations of the transmitted signal. Corron and Hahs [1997] proposed a nonlinear filter to over-come the use of differentiations. Recently, we have provided a rigorous analysis on the stability and performance of CMo methods for a class of chaotic systems [Alvarez-Ramirez et al., 2001].
Recent studies have proposed mixed analog chaotic communication approaches which combine features of CMa and CMo procedures [Morgul & Solak, 1996; Liao & Huang, 1999]. The recovering of the information signal at the receiver end uses ideas from state observers [Kailath, 1980, 1993] to synchronize the transmitter and the receiver sys-tems. Liao and Huang [1999] provided an analysis based on integral-inequalities (Bellman–Gronwall inequality) to construct an observer for a general class of nonlinear systems. Although their analy-sis ensures synchronization stability, it is not clear when synchronization can be achieved for a given nonlinearity and how to choose the so-called ob-server gain matrix. This is because the param-eters involving the underlying stability condition (see Eq. (7) in Liao and Huang’s paper) depend on the observer gain matrix in a complex manner. Given this difficulty, the authors proposed a trial-and-error procedure based on a Riccati inequal-ity. However, it is not clear how the parameters of the Riccati inequality affects the synchronization convergence rate.
We believe that these difficulties in observer-based (OB) approaches arise because the analysis is made for a rather general class of nonlinear chaotic systems. In principle, an analysis that focuses on particular classes of nonlinear systems could ex-ploit their specific properties and structures to gain insights to the mechanisms of information signal recovering in the presence of e.g. nonlinearities, transmission noise and parameter mismatch.
This paper, in the spirit of previous work [Morgul & Solak, 1996; Liao & Huang, 1999], stud-ies the stability of observer-based communication systems for a class of Lur’e chaotic systems. We exploit certain observability properties to provide an explicit and easy procedure to construct the ob-server gain matrix. By using Lyapunov function arguments, we show how the parameters of the ob-server gain matrix affects the convergence rate, and
show how the convergence rate can be assigned by tuning a single parameter. Our stability analysis also provides a framework to study the effects of transmission noise on the decodification procedure, and suggests a possible route to reduce its adverse effects. Numerical simulations on the Chua’s circuit are used to illustrate our findings.
With respect to existing results in the literature (see [Morgul & Solak, 1996; Liao & Huang, 1999]), our contribution in this paper can be summarized as follows:
• An explicit construction of the observer gain ma-trix is provided. While in [Morgul & Solak, 1996] no procedure to compute the observer gain matrix was given, in [Liao & Huang, 1999] such computation was given in terms of a trial-and-error procedure which does not ensure its existence.
• A prescribed synchronization error convergence rate can be assigned. This can be done easily by tuning a single parameter of the observer gain matrix.
• Transmission noise and conditions under which its adverse effects on the recovered information signal can be reduced, are studied. To the best of authors’ knowledge, this issue has not been pre-viously studied.
The paper is organized as follows. In Sec. 2, the class of Lur’e systems is established. In Sec. 3, the problem of chaotic system synchronization based on observers is analyzed. In Sec. 4, applications of re-sults in Sec. 3 to chaotic communication systems are given. In Sec. 5, some effects of transmission noise on the performance of the communication systems are studied. In Sec. 6, some numerical simulations to illustrate our findings are carried out, and finally in Sec. 7 some conclusions are presented.
Notation. In the sequel, we will use the
follow-ing notation. The symbol xT denotes the trans-pose of then-dimensional vector x, and kxk is its Euclidean norm. Moreover, kxk∞ = maxt≥0kx(t)k
is the∞-norm of then-dimensional signalx(t), and
kx(t)ka = limt→∞kx(t)k is the asymptotic limit of the signalkx(t)k. As usual,Inis then-dimensional identity matrix, and 0n= (0,0, . . . ,0)T ∈Rn.
2. A Class of Lur’e Systems
Consider the class of Lur’e systems described by
[Suykens et al., 1997] ˙
z=Az+Bϑ(DTz), z(0) =z0 (1)
wherez∈Rnis the state vector,A∈Rn×n,B ∈Rn,
D∈Rn are matrices and vectors of system param-eters, andϑ:R→Ris a nonlinearity. Lety∈Rbe a (measurable) system output, where
y=CTz (2)
and CT ∈ Rn. The Lur’e system (1) is a linear dynamical system, feedback interconnected to a single static nonlinearity ϑ : R→ R. We will take the following assumptions:
A.1 The nonlinear function ϑ(·) is globally Lipschitz.
A.2 The pair (A, CT) is observable in the sense that the range of the observability matrix
O= CT CTA : CTAn−1 ∈R n×n (3) is equal ton.
A.3 OB = (0, . . . ,0, bo)T, for a given constant
bo 6= 0. This condition implies a matching structure of the nonlinearityϑ(DTz) with re-spect to the observability matrix.
Remark 1. Assumptions A.2 and A.3 are met if there exists a vector C∈Rnsuch that
rank(O) =n (4)
and
CTAiB = 0, i= 0, . . . , n−2 (5)
Notices that (5) defines a system ofn−1 equations withn unknowns; namely, the entries of the vector
C ∈ Rn. Assumption A.2 implies that the system has one degree-of-freedom. Hence, vectors C ∈Rn
can be found by solving the rectangular system (5). Remark 2. It can be verified that several well-known chaotic circuits, including the Chua and Colpitts [Kennedy, 1994] circuits, can be inter-preted as Lur’e systems of the class described above. For instance, in the Chua circuit, ϑ(DTz) =α1z1+
1/2(α0 −α1)(|z1 +α2| − |z1 −α2|) is a
! # % ' ( ) * + ,- . 0 2 4 56 7 8 9 : < >@A B D E F GI KMN O PR S T V X Y Z [ \ ]_ ` a b d e f g h ij k l m no p q r s tuv w x y z{| }~ ¡ £ ¤ ¥¦ § ¨ © « ¬ ® ¯ ° ±²³ ´ µ¶ · ¸ ¹ º » ¼½ ¾ ¿ À
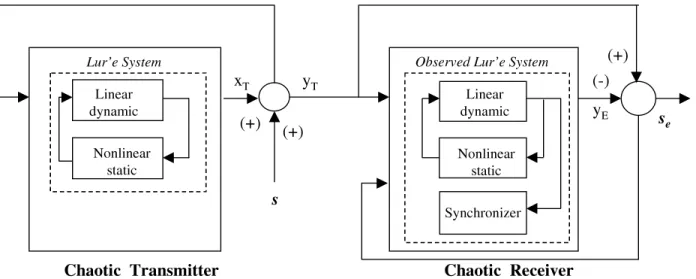
Fig. 1. Schematic diagram of the observer-based communication system.
and z1 is a capacitor voltage. Moreover, in a given
coordinates framework, A= 0 a1 0 1 −1 1 0 −a2 0 (6)
It can be shown that if CT = (0,0,1), then rank(O) = 3 and Assumption A.3 is met (see Sec. 5).
The system (1) will be used for secure commu-nications application, as shown in Fig. 1. Following the ideas in [Morgul & Solak, 1996], the transmitted signal is a sum of the information and the outputy
of the chaotic transmitter. In addition, the trans-mitted signal is also injected into the transmitter and, at the same time, transmitted to the receiver. A chaotic receiver is then derived to recover the in-formation signal via system synchronization.
3. Observer-Based System Synchronization
System synchronization plays a central role in the recovering process of the information signal. As a preliminary step to address the secure communica-tion problem for the class of Lur’e systems (1), the problem of observer-based synchronization of two identical Lur’e systems is studied in this section.
Consider the Lur’e system (1) and an identical copy of it:
˙
z=Az+Bϑ(DTz), z(0) =z0 (7)
In general, z0 6=z0, such that z(t;z0) 6= z(t;z0),
for almost all t > 0. Due to high sensitivity to initial conditions, the difference z(t;z0) 6=z(t;z0)
is more evident if the Lur’e systems evolve into a chaotic regimen. Then, one can expect that spon-taneous synchronization (i.e. z(t;z0) = z(t; z0))
of the Lur’e systems (1) and (7) is a rare, and even impossible event. The following definition is adapted from well-known observer concepts in sys-tems theory [Kailath, 1980].
Definition 1. It will be said that the function
φ(y, z) is an asymptotic (exponential) synchronizer for the Lur’e system (1) if the solutionz(t;φ, z0) to
the system ˙
z=Az+Bϑ(DTz) +φ(y, z), z(0) =z0 (8)
gives z(t;φ,z0) → z(t;z0) asymptotically
(respec-tively exponentially).
Notice that, for the sake of system synchroniza-tion, the system outputy∈Rndrives the dynamics of the Lur’e system’s copy (8). In the terminol-ogy of systems theory [Kailath, 1980], system (8) plays the role of a state observer for the Lur’e sys-tem (1). That is, given measurements of the syssys-tem outputy, the system (8) provides an asymptotically (respectively exponentially) convergent estimate of the unmeasured system states z∈Rn.
Although several strategies to design the synchronizer φ(y,z) have been proposed in the literature, the most common one is a Luenberger-type function [Kailath, 1980]:
where L ∈ Rn×n is a matrix to be determined later.
Proposition 2. Under the Assumptions A.1 to
A.3, there exists a matrix L ∈ Rn×n such that
z(t;φ, z0)→z(t;z0) exponentially. That is, system
(8) synchronizes exponentially with system (1). Proof. To construct the matrix L, consider the following linear change of coordinates:
x=Oz (10)
where O ∈ Rn×n is the observability matrix (3). By virtue of Assumption A.2, the matrix O is in-vertible. It is not hard to show that the coordinate change (10) leads to the following representation of the Lur’e system (1) (see e.g. [Kailath, 1980]):
˙ x= (Ao+E)x+Boϑ(DoTx), x(0) =x0 (11) with y=CoTx where Ao+E=OAO−1;Bo=OB; CT o =CTO−1;DoT =DTO−1 (12) In particular, the matrix Ao displays the following companion form: Ao= 0n−1 I(n−1)×(n−1) 01 0Tn−1 ! (13)
and the matrixE has the structure
E= 0(n−1)×n
GT
!
whereG∈Rnis a constant vector depending on the parameters ofA. On the other hand, the matrixCo becomes
CoT = (1,0, . . . ,0)
By virtue of Assumption A.3, system (11) can be rewritten as
˙
x=Aox+Boσ(x), x(0) =x0 (14)
whereσ(x)def= bo−1GTx+ϑ(DoTx).Notice that, since
ϑ(DoTx) is globally Lipschitz (Assumption A.1),
σ(x) is also globally Lipschitz (i.e.|σ(ξ1)−σ(ξ2)| ≤
kσ|ξ1−ξ2|, for all ξ1, ξ2 ∈ R). The corresponding
synchronization system is then given as ˙ x=Aox+Boσ(x) +Lo(y−y), x(0) =x0 (15) with y=CoTx where Lo=OL (16)
Consider the matrix Lo depending on a positive parameterθ: Lo(θ) = α1θ α2θ2 : αnθn (17)
where α1 to αn are chosen such that the polyno-mial pn(s) = sn+α1sn−1 +· · ·+αn is Hurwitz (i.e. all its roots are contained in the LHS of the complex plane). To prove that the matrix (17) pro-vides the desired convergence properties, introduce theθ-scaled synchronization error:
e= Θ(x−x) (18)
where
Θ = diag(θn−1, θn−2, . . . ,1) (19) Since θ >0 andO is an invertible matrix, e(t)→0 implies thatz(t)→z(t). Hence, it suffices to prove that e(t) → 0 exponentially. From (14), (15), (17) and (18), and recalling thaty−y=CoT(x−x), the
e-dynamics are governed by the following system: ˙
e=θMoe+ ΘBo[σ(x)−σ(x)] (20)
where
Mo=Ao−Lo(1)CoT (21)
and the characteristic polynomial of Mo ispn(s) =
sn+α1sn−1+· · ·+αn, which is Hurwitz by construc-tion. Hence, the matrixMois a stability matrix and the Lyapunov equation
has a unique matrix solution Po > 0. Consider the quadratic function V(e) = eTPoe. The time-derivative of V(e) along the trajectories of system (20) is
˙
V(20) =−θkek2+ 2eTPo(ΘBo[σ(x)−σ(x)])
≤ −θkek2+ 2keTPo(ΘBo[σ(x)−σ(x)])k By noticing that ΘBo = bo (Assumption A.3), the following inequalities hold forθ≥1:
keTPo(ΘBo[σ(x)−σ(x)])k
≤ kekkPokkΘBok|σ(x)−σ(x)|
≤kσλmax(Po)|bo|kx−xkkek (Assumptions A.1)
≤kσλmax(Po)|bo|kΘ−1kkek2 (Eq. (18))
≤kσλmax(Po)|bo|kek2 (Eq. (19))
whereλmax(Po) stands for the maximum eigenvalue of matrixPo. Consequently
˙
V(20) ≤ −(θ−kσλmax(Po)|bo|)kek2
which implies that ˙V(20) < 0, kek > 0, as long as
θ > θmin, where
θmin def
= max{1, kσλmax(Po)|bo|} (23) From standard Lyapunov arguments, we conclude thatz(t;z0)→z(t;z0) if the matrixL is chosen as
L(θ) =O−1Lo(θ), θ > θmin (24)
This concludes the proof.
The θ-parametrization of the matrix L(θ) provides a simple tuning procedure. In fact, since
V(t) ≤ V(0) exp[−(θ−kσλmax(Po)|bo|)], the larger the value of θ, the faster the convergence of the synchronization errorz(t)−z(t).
4. Chaotic Secure Communication
Based on the stability result described in Proposi-tion 2, a secure communicaProposi-tion scheme is proposed in this section. The transmitter is a slight modifi-cation of the chaotic Lur’e system represented by
˙
z=Az+Bϑ(DTz) +L(θ)s, z(0) =z0
yT =y+s
(25)
where yT is the transmitted signal, y = CTz, and
s ∈ R is the information signal. The transmit-ter combines chaotic masking (y+s) and chaotic modulation (L(θ)s). The receiver is constructed as follows:
˙
z=Az+Bϑ(DTz)+L(θ)(yT−y), z(0) =z0]
y=CTz (26)
where L(θ) is given as in Eq. (24). The recovered information signalsis given by
s=yT −y
=CT(z−z) +s
=CTO−1Θ−1e+s[from Eqs. (10) and (18)] (27) Then,s(t)→s(t) exponentially as long as e(t)→0 exponentially. From (25) and (26), we have that
˙
z−z˙= (A−L(θ)CT)(z−z)
+B[ϑ(DTz)−ϑ(DTz)] (28) As above, if the synchronization error ise= Θ(x− x) = ΘO(z−z) [see Eq. (10)], the e-dynamics are given by (20). By virtue of Proposition 2, e(t)→0 for all θ > θmin. This implies that the information
signals(t) can be recovered exponentially at the re-ceiver by means of the scheme (25).
Remark 3. Similar chaotic communication schemes as that described above have been studied pre-viously [Morgul & Solak, 1996; Liao & Huang, 1999]. A drawback of such schemes is that it is not apparent how one chooses the matrix L so that z(t)−z(t) → 0. Liao and Huang [1999] pro-posed a trial-and-error procedure based on a Riccati inequality. The procedure has to be solved numer-ically as a convex optimization problem. Besides, due to an unclear relationship between the system parameters, it is not simple to prescribe the con-vergence rate. Our procedure has no such draw-backs. In fact, the matrix L can be chosen just by an easy computation of the observability matrix
O and a selection of a single tuning parameter θ. Stability (i.e. z(t) −z(t) → 0) is guaranteed for sufficiently large values of θ, namely, θ > θmin.
On the other hand, a lower bound rmin > 0 of
the convergence rate can be prescribed by
choos-ing θ > rmin +βmax, where βmax is a worst-case
computed from the system parameters, andkσ can be computed from the single nonlinearity σ.
5. Effects of Transmission Noise
So far, it has been assumed that the transmitted sig-nalyT is equal to the received signalyR. In practice, certain noise level is present in transmission lines, which can be amplified by high gains and displayed as highly noised recovered information signals(t). To avoid this phenomenon, one could try to use low-pass filtering for the received signalyR(t). However, since the outputyT(t) of the transmission system is noise-like, in addition to transmission noise, low-pass filtering can remove chaotic oscillation modes as well. An excessive smoothing of the received signal, in turn, would lead to erroneous recovered signals.
Assume that the received signal is yR(t) =
yT(t) +ηT(t), where ηT(t) is an additive transmis-sion line noise with zero mean. Assume that no pre-filtering procedures are made on yR. In this case, the receiver is given by
˙
z=Az+Bϑ(DTz) +L(θ)(yT −y)
+L(θ)ηT, z(0) =z0 (29)
and the recovered information signal is given by [see Eq. (27)]
s=yT −y+ηT
=CTO−1Θ−1eη+ηT +s (30) where eη is the noisy synchronization error with
eη → enf as ηT → 0, where enf is the noise-free synchronization error. In fact, since L(θ)ηT is a noisy signal,z(t) and soeη are noisy signals. In this way,s is a noisy signal with two contributions: a direct contribution [ηT in Eq. (30)] and an indirect contribution from the propagation of ηT through the receiver system (29). The former contribution is fixed and depends only on the transmission con-ditions. The former contribution depends on the value of the parameterθ.
To analyze the effects of ηT in the receiver sys-tem, we proceed as follows. As above, define the noisy synchronization error aseη = Θ(x−x), such that its dynamics are governed by
˙
eη =θMoeη+ ΘBo[σ(x)−σ(x)]
−ΘOL(θ)ηT (31)
Since ηT is bounded and σ(z) is globally Lips-chitz, Proposition 2 and Lyapunov function argu-ments [Kailath, 1993] imply that eη(t) is uniformly bounded for all (finite) θ > θmin. From (30), it
seems to be natural to use the variable
εη =O−1Θ−1eη (32)
so that
s=CTεη+ηT +s (33)
Then, system (31) is rewritten as ˙
εη =θNoεη +O−1Bo[σ(x)−σ(x)]
−L(θ)ηT (34) where No = O−1Θ−1MoΘO and Mo are similar matrices. Because of the presence of the nonlin-earity σ, an exact analysis of the effects of ηT on
eT is complex and is beyond the aims of this paper. However, since information signal recovering is car-ried out for large values of θ and to gain insights to the propagation ofηT, we shall proceed to study system (31) for large values ofθ. Ifθis sufficiently large such the linear dynamics dominates over the nonlinearityσ(see the proof of Proposition 2), then system (31) can be approximated as
˙
εη ≈θNoεη−L(θ)ηT (35)
Notice that ΘBo =bo. In this way, ΘBois a function that does not increase withθ. As in the case ofeη,
εη(t) is uniformly bounded for all (finite) θ > θmin,
and εη(t)→ 0 as ηT → 0. That is, εη(t) converges exponentially to a neighborhood of the origin N0,
for all θ > θmin. Once the effects of initial
con-ditions εη(0) are less important because of expo-nential convergence ofεη(t) toN0, the transmission
noise becomes the more important dynamics on the information signal recovery. In this way, without loss of generality we can take εη(0) = 0. Then
εη(t)≈ −
Z t
0
exp(θNo(t−τ))L(θ)ηT(τ)dτ (36) such thatεη(t) is also a zero-mean noise [Papoulis, 1965]. Moreover, from (17) and (24) it can be con-cluded that|εη(t)|=o(θn). That is, the noiseηT(t) is amplified in the noisy synchronization errorεη(t) by a factor of the order of power θn: the larger the value ofθ, the larger the asymptotic (i.e. in the neighborhood N0) synchronization error εη(t). In
this way, |CTεη| |ηT| for large values of θ, so that
|s−s|=o(θn) (37) which means that the information recovery error
s−sgrows at the rate θn. However, since s−s=
CTεη+ηT, it is noted thats−sbehaves asymptoti-cally as a pure noise with zero-mean. An interesting problem is then posed as follows: under what con-ditions, the transmitted noise
η∗ =CTεη +ηT
can be removed from the recovered information signals so thats ≈ s? A general answer to this question is not easy. However, we proceed to pro-vide a solution for a particular case.
Let Ss(ω) and Sη(ω) be the power spectrum of the signals s(t) and ηT(t), respectively. From the Fundamental Theorem for power spectrum [Papoulis, 1965], for large values of θ we have the approximation Sη1(ω) ≈ |H(jω)|
2S
η(ω), where
η1 def
= CTεη and H(jω) is the transfer function
H(jω) =−CT(jωIn−θNo)−1L(θ) (38)
From (35), it can be verified thatH(jω) is strictly proper, so that |H(jω)| rolls down for large values ofω (i.e.|H(jω)| →0 as ω → ±∞). Besides, since
No is a Hurwitz matrix,
|H(0)|=θ|CTNo−1L(θ)|
< θn+1|CTNo−1L(1)|
<∞
for allθ > θmin. That is,|H(jω)|is bounded for all
ω∈R. Assume that the dynamics ofηT(t) are dom-inated by high-frequency modes, so thatSη(ω)≈0 for all|ω|< ωηc (i.e. ωcη is a cut-off frequency). We obtain that the dynamics of η1(t) are also
domi-nated by high-frequency modes in the sense that
Sη1(ω)≈0 for all |ω|< ω c
η. As a consequence,
Sη∗(ω)≈0 for all |ω|< ωcη (39) Notice that Sη∗(ω) = o(θ2n), which is in agree-ment with the discussion above. Let us assume that the dynamics of the information signal s(t) are dominated by low-frequency modes relative to the dynamics of the transmission noiseηT(t), i.e.
Ss(ω)≈0 for all|ω|> ωsc, ωsc < ωηc (40)
By virtue of (39), this means that Ss(ω) andSη(ω) do not overlap:
Ss(ω)∩Sη(ω)≈
Let F(jω;ωFc) be a low-pass filter with cut-off fre-quency ωFc. If ωsc < ωFc < ωηc, then the low-pass filter F(jω; ωcF) is able to remove the transmitted noise η∗(t) from the recovered information signal. That is, sinceF(jω; ωcF)η∗ ≈0, then
sF def= F(jω;ωFc)s
= F(jω;ωFc)[η∗+s] [from Eq. (33)]
≈ F(jω;ωFc)s(from basic properties of low-pass filtering)
≈ s (41)
That is, if the condition (40) is met, the effects of the transmission noise can be reduced by the appli-cation of a suitable low-pass filter on the outputs
of the receiver. Condition (40) is not so restrictive from a practical viewpoint since masked signals are commonly low-frequency with respect to transmis-sion line dynamics and transmitted chaotic signal. Although the analysis described above is only an approximation, we will illustrate in the following section the effectiveness of low-pass filtering of the recovered signals(t).
Remark 4. By noticing that the transmission noise
ηT(t) acts directly on the transmitted chaotic signal, it has been proposed to use noise-reduction tech-niques to “recover” the actual chaotic signal yT =
CTz + s [Farmer & Sidorowich, 1991; Lee & Williams, 1997; Jako & Kis, 2000]. This can be as a filtering at the input of the receiving sys-tem. The method is of model-based nature and involves an optimization problem with high com-putational burden. The cost function is composed of two parts: one containing information that rep-resents how close the enhanced signal is to the re-ceived signal and another composed of constraints that fit the system model. Although the method has been successful when tested in simple chaotic system (e.g. Ikeda and Henon maps), further in-vestigations have shown that, even if the SNR is improved, the corresponding BER of the communi-cation system under investigation is not necessarily improved [Kis & Jako, 2000]. Aimed to improve the BER of the communication system, whether
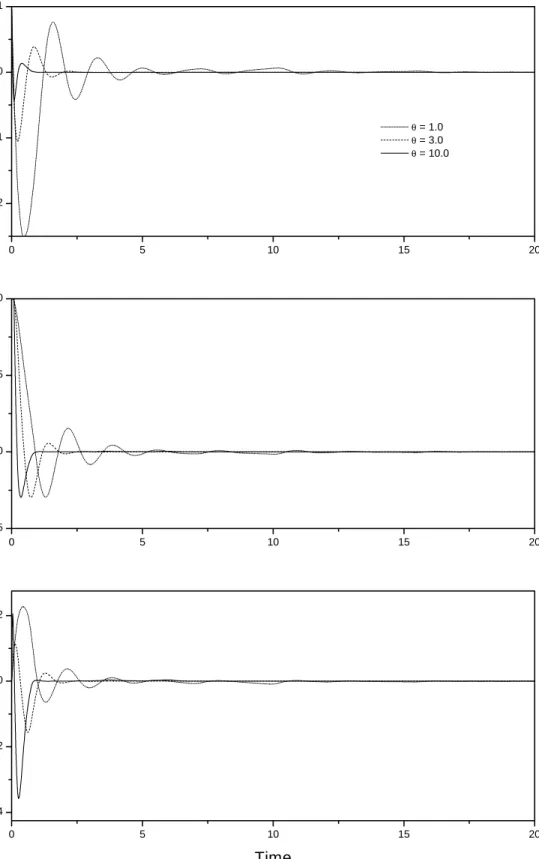
0 5 10 15 20 -0.4 -0.2 0.0 0.2 0 5 10 15 20 -0.05 0.00 0.05 0.10 0 5 10 15 20 -0.2 -0.1 0.0 0.1 Sy nchr oni z a ti on er ro r, e1 Time Sy nchr oni z a ti on er ro r, e2 Sy nchr oni z a ti on er ro r, e3 θ = 1.0 θ = 3.0 θ = 10.0
-3.0 -1.5 0.0 1.5 3.0 -0.6 -0.3 0.0 0.3 0.6 0 20 40 60 80 100 -4 -3 -2 -1 0 1 2 3 4 0 3 6 9 12 15 -0.2 -0.1 0.0 0.1 0.2 Z 2 Z 1 y T Time S e Time Information signal
-3.0 -1.5 0.0 1.5 3.0 -0.6 -0.3 0.0 0.3 0.6 0 20 40 60 80 100 -4 -3 -2 -1 0 1 2 3 4 0 3 6 9 12 15 -0.2 -0.1 0.0 0.1 0.2 Z 2 Z 1 y T Time S e Time Information signal
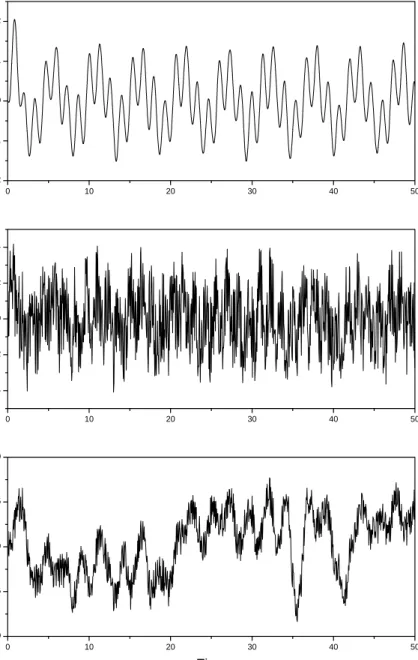
0 10 20 30 40 50 -5.0 -2.5 0.0 2.5 5.0 0 10 20 30 40 50 -0.4 -0.2 0.0 0.2 0.4 0 10 20 30 40 50 -0.2 -0.1 0.0 0.1 0.2 yT Time Se Sf
Fig. 5. Effect of high-frequency noise on the behavior of the communication system for a differentiable information signal.
to use prefiltering of the received chaotic signal and/or postfiltering of the noisy recovered informa-tion signal as described in this paper, is an issue that deserves further investigation.
6. Numerical Simulations
We have carried out some numerical simulations on Chua’s circuit to illustrate our findings. In such a case, A= 0 a1 0 1 −1 1 0 −a2 0 , a1, a2 6= 0 and ϑ(DTz) =α1z1+ 1 2(α0−α1)(|z1+α2| − |z1−α2|)
with B = (−a1,0,0)T. It can be verified that
ϑ(DTz) is globally Lipschitz (Assumption A.1). On the other hand, ifC = (0,0,1)T, we have that
rank(O) = rank 0 0 1 0 −a2 0 −a2 a2 −a2 = 3
and OB = 0 0 a1a2
so that Assumptions A.2 and A.3 are satisfied. If
Lo(θ) = (3θ,3θ2, θ3)T such that the eigenvalues of the matrixMo =Ao−Lo(1)CoT (which are the roots of the polynomialp3(s) =s3+ 3s2+ 3s+ 1) are all
located at−1, the observer gain vectorL(θ) is given by [see Eq. (24)] L(θ) =O−1Lo(θ) = 3a2+ 3θ+θ2 a2 ! θ 3 a2 θ2 −3θ The Chua circuit displays chaotic behavior for the following set of parameter values: a1 = 9, a2 =
14.286, α0 = −1/7, α1 = 2/7 and α2 = 1. For
this set of values, the Chua circuit exhibits a dou-ble scroll type chaotic behavior [Chua, 1994] (a) Synchronization error. To illustrate the fact
that an arbitrary convergence rate of the syn-chronization error can be prescribed, Fig. 2 presents the individual synchronization errors
zi−zi,i= 1,2,3, for three different values of the observer parameter θ. As expected, zi−zi con-verges exponentially to zero and the larger the value of θ, the faster the convergence. In this way, up to the point where undesirable high-frequency effects (e.g. noise, rippling, etc.), in-crements of θ enhance the performance of the chaos synchronizer system.
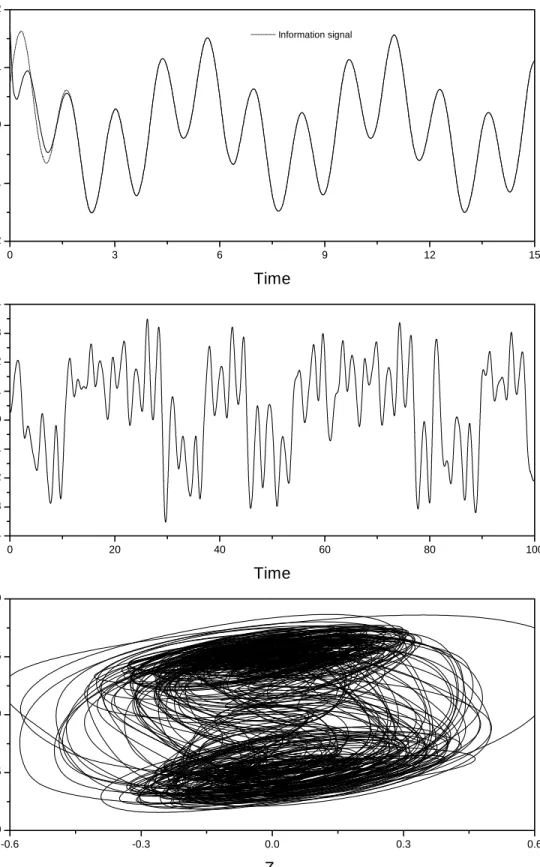
(b) Communication system. Figure 3 presents the behavior of the communication system de-scribed in Sec. 4 for θ = 3 and a continuously differentiable information signal. The informa-tion signal is recovered after three oscillainforma-tions of the chaotic transmitted signal. Figure 3 also presents the (z1, z2)-phase plane, which shows
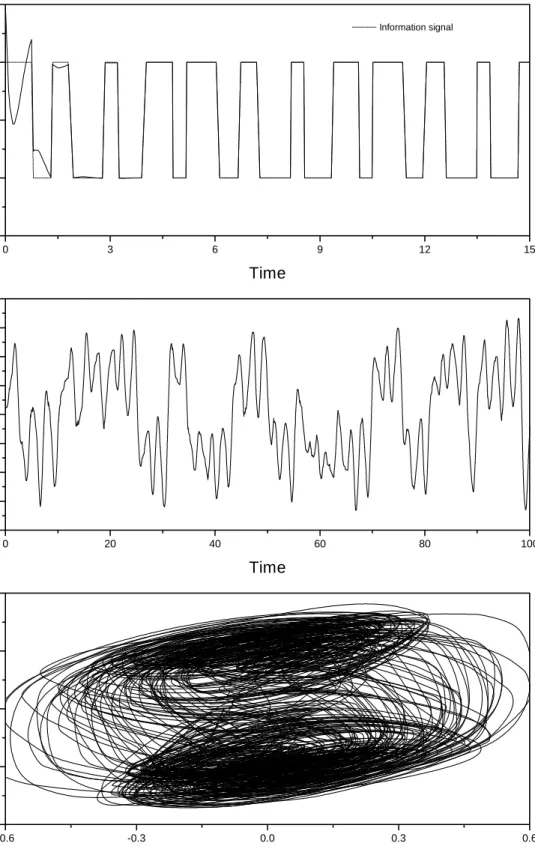
that chaotic nature of the transmitter dynam-ics. Figure 4 presents similar results for a bi-nary signal. Notice thats(t) displays peaking behavior at points where s(t) is noncontinuous. This is not a serious drawback since such signal peaking is of high-frequency nature and, as in the transmission noise case, can be removed by means of low-pass filtering.
(c) Transmission noise. Figure 5 presents the re-covered signals(t) when the received signal is contaminated with high-frequency noise nT(t) with zero mean and 10% of relative amplitude. The recovered signal s(t) appears as a high-amplitude noisy signal because nT(t) is ampli-fied O(θ3). As discussed in Sec. 5, for
suffi-ciently large values of θ the information signal can be recovered by low-filterings(t). Figure 5 also presents the filtered recovered signalsf(t) obtained by means of a second-order Butten-worth filter. Notice that the information signal is recovered with quite acceptable recovery error and NSR.
Remark 5. It should be stressed that, although we have illustrated our findings with Chua’s circuits, we have found similar results with the Colpitts circuit and the Lorenz chaotic oscillator. This demonstrates the wide applicability of our results in synchronization of chaotic system and chaotic com-munication systems.
7. Conclusions
The stability of observer-based communication systems with a class of Lur’e systems, was analyzed in this paper. Specifically, it has been character-ized as a class of Lur’e systems for which arbitrary convergence rate of the synchronization error can be prescribed. The conditions under the Lur’e sys-tems are not restrictive and are satisfied by sev-eral well-known chaotic systems including the Chua and Colpitts circuit. An explicit construction of the observer gain matrix was given in terms of a single parameter, which can be easily tuned to trade off between stability (convergence rate) and performance (noise amplification). Conditions un-der which the effects of transmission noise can be reduced by low-pass filtering of the receiver out-put, have been given. Numerical simulations on the Chua’s circuit were carried out to illustrate our findings.
References
Alvarez-Ramirez, J. J., Puebla, H. & Solis-Daun, J. [2001] “An inverse system approach for chaotic communications,” Int. J. Bifurcation and Chaos
11(5), 1411–1422.
Carroll, T. L. & Pecora, L. M. [1993] “Synchronizing nonautonomous chaotic circuits,” IEEE Trans. Cir-cuits Syst. I40, 645–650.
Chua, L. O. [1994] “Chua’s circuit 10 years later,” Int. J. Circuit Th. Appl. 22, 279–305.
Corron, N. J. & Hahs, D. W. [1997] “A new approach to communications using chaotic signals,” IEEE Trans. Circuits Syst. I 44, 373–382.
Cuomo, K. M. & Oppenheim, A. V. [1993] “Robustness and signal recovery in a synchronized chaotic system,”
Int. J. Bifurcation and Chaos 3, 1629–1638.
Farmer, J. D. & Sidorowich, J. J. [1991] “Optimal shad-owing and noise reduction,”PhysicaD47, 377–392. Feldmann, U., Hasler, M. & Schwarz, W. [1996]
“Com-munication by chaotic signals: The inverse system approach,” Int. J. Circuit Th. Appl.24, 551–579. Frey, D. R. [1993] “Chaotic digital encoding: An
ap-proach to secure communications,” IEEE Trans. Circuits Syst. II40, 660–666.
Halle, K. S., Wu, C. W., Itoh, M. & Chua, L. [1993] “Spread spectrum communications through modu-lation of chaos,” Int. J. Bifurcation and Chaos 3, 469–477.
Heidari-Bateni, G., McGillem, C. D. & Tenorio, M. F. [1992] “A novel multiple-address digital communi-cation system using chaotic systems,” Proc. Int. Commun. Conf., pp. 1232–1236.
Itoh, M., Wu, C. W. & Chua, L. O. [1997] “Communica-tion system via chaotic signals from a reconstruc“Communica-tion viewpoint,”Int. J. Bifurcation and Chaos7, 275–286. Jako, Z. & Kis, G. [2000] “Application of noise reduc-tion to chaotic communicareduc-tions: a case study,” IEEE Trans. Circuits Syst. I: Fundamental Th. Appl. 47, 1720–1725.
Kailath, T. [1980] Linear Systems (Prentice-Hall, Englewood-Cliffs, NJ).
Kailath, T. [1993] Nonlinear Systems Analysis, 2nd edition (Prentice-Hall, Englewood-Cliffs, NJ).
Kennedy, M. P. [1994] “Chaos in the colpitts oscillator,”
IEEE Trans. Circuits Syst. I41, 771–774.
Kis, G. & Jako, Z. [2000] “Noise reduction of DCSK mod-ulation schemes,” J. Sign. Process Special Section on Nonlin. Sign. Process4, 71–78.
Kocarev, L., Halle, K. S., Eckert, K., Chua, L. O. & Parlitz, U. [1992] “Experimental demonstration of secure communication via chaotic synchronization,”
Int. J. Bifurcation and Chaos 2, 709–713.
Lee, Ch. & Williams, D. B. [1997] “Generalized iterative methods for enhancing contaminated chaotic signals,”
IEEE Trans. Circuits Syst. I44, 501–512.
Liao, T.-L. & Huang, N.-S. [1999] “An observer-based approach for chaotic synchronization with applica-tions to secure communicaapplica-tions,” IEEE Trans. Cir-cuits Syst. I46, 1144–1150.
Morgul, O. & Solak, E. [1996] “Observed based syn-chronization of chaotic systems,” Phys. Rev. E54, 4803–4811.
Ogorzalek, M. J. [1993] “Taming chaos — Part I: Synchronization,” IEEE Trans. Circuits Syst. I 40, 693–699.
Oksasoglu, A. & Akgul, T. [1997] “A linear inverse system approach in the context of chaotic communi-cations,”IEEE Trans. Circuits Syst. I44, 75–79. Papoulis, A. [1965] Probability, Random Variables and
Stochastic Processes(McGraw-Hill, NY).
Parlitz, U., Chua, L., Kocarev, L. J., Halle, K. S. & Shang, A. [1992] “Transmission of digital signals by chaotic synchronization,” Int. J. Bifurcation and Chaos 2, 973–977.
Parlitz, U. & Ergezinger, S. [1994] “Robust communica-tion based chaotic spreading sequences,” Phys. Lett.
A188, 146–150.
Pecora, L. M. & Carroll, T. L. [1990] “Synchronization in chaotic systems,”Phys. Rev. Lett.64, 821–824. Suykens, J. A., Curran, P. F. & Chua, L. O. [1997]
“Robust synthesis for master-slave synchronization of Lur’e systems,” IEEE Trans. Circuits Syst. I 46, 841–850.
Wu, C. W. & Chua, L. O. [1994] “A unified framework for synchronization and control of dynamical systems,”