© 2018, IRJET | Impact Factor value: 6.171 | ISO 9001:2008 Certified Journal | Page 4141
Vision Based Automatic Parking Slot Detection for ADAS
Santhosh D K
1, Honnaraju B
21
Mtech. Student, Department of Computer Science and Engineering, Maharaja Institute of Technology - Mysore,
Karnataka, India
2
Associate Professor
of Department for Computer Science and Engineering, Maharaja Institute of Technology -
Mysore, Karnataka, India
---***---ABSTRACT -
The fast increment of autos the need todiscover accessible parking spot in the most productive way, to dodge activity clog in a stopping territory, is turning into a need in auto stop administration. ADAS structure offers assistance to the driver and makes progress driving foundation. Current auto stop administration is subject to either human work force monitoring the accessible auto stop spaces or a sensor based framework the establishment and support cost of a sensor construct framework is reliant with respect to the quantity of sensors utilized as a part of an auto stop. The picture division calculation utilized with the expectation of complimentary space identification. Vision based framework that can distinguish and demonstrate the accessible parking spots by utilizing camera in vehicle.
Key Words: ADAS, Sensors, vision, Car Park, Parking
Space, Segmentation.
1. INTRODUCTION
Programmed stopping frameworks effectually affect Automatic Driver Assistance framework (ADAS) and have been broadly asked about. Regardless, most existing sensor-based customized parking spot disclosure methodologies can't procure the pined for results in light of assortment in light power or complex impediment conditions. Also, most past stopping framework acknowledgment strategies simply consider the target position controlled by vehicles yet slight the nearness of little inquiries, for instance, development cones and ceasing lock inside the halting stamping. With a particular ultimate objective to vanquish this deficiency, in this paper proposes a novel vision-based modified stopping opening revelation method to distinguish distinctive parking spot by involving four cameras around the vehicle. Stopping of autos in a stopping territory is turning into a troublesome assignment as the quantity of autos increments while the quantity of parking spots is limited. Therefore, individuals would invest a specific measure of energy searching for parking spot and in this way cause a circumstance where the activity would be backed off and cause clog. The situation of looking for parking space and traffic congestion in parking areas is due to the fact that the information of available parking spaces is not readily available to the people looking for parking spaces. As such different approaches have been used to develop a car park parking system such as wireless sensor network system [1] and a vision system [2].
1.1 EXISTING SYSTEM
On existing vision-based parking area frameworks that utilization just point of view cameras, Blumer et al. [3]
recognized empty parking spots by a solitary point of view camera utilizing edge and street shading data and developed the districts of the parking spots physically. Huang and Wang [4] distinguished empty parking spots by point of view cameras and utilized a three-layer Bayesian various leveled structure to handle the issues of luminance varieties, shadow impacts, impediments among vehicles, and so forth., after the 3-D models of the parking spots were built ahead of time. Ichihashi et al. [5] distinguished empty parking spots utilizing point of view cameras in light of fluffy c-implies grouping and molecule swarm advancement and denoted the locales of parking spots physically. Lixia and Dalin [6] decided the opening of a parking spot in view of picture division and neighborhood parallel examples, giving that the pixels of the parking spot are known ahead of time. In these techniques, the districts of the parking spots were divided out physically. Unexpectedly, the strategy proposed in this examination expects to lead this significant advance consequently to develop a simple to-set-up framework.
1.2 PROPOSED SYSTEM
The vision based framework recognizes the free parking spot by utilizing cameras around the vehicle and distinguishes the items in parking spot by ascertaining the profundity and separation of the question from the vehicle and divider edges. This data sends to the innovation that helped with ADAS framework.
2. RELATED WORK
The proposed system is an independent, camera based framework. It is intended to recognize through pictures around the vehicle.
SEGMENTATION
Picture division is the route toward isolating a photo into various parts. This is normally used to perceive objects or other critical information in automated pictures. There are different ways to deal with perform picture division, including: Thresholding techniques, for example, Otsu's strategy, Transform strategies, for example, watershed division, Texture strategies, for example, surface channels, Color-based Segmentation, for example, K-Means Clustering.
© 2018, IRJET | Impact Factor value: 6.171 | ISO 9001:2008 Certified Journal | Page 4142
demonstrates limits which were procured by thresholdingthe muscle fibers picture. Pixels with values less than 128 have been placed in one class, and the rest have been set in the other order. The points of confinement between close-by pixels in organize classes have been superimposed in white on the principal picture. It can be seen that the edge has viably separated the photo into the two overpowering fiber makes. In edge-based division, an edge channel is associated with the photo, pixels are named edge or non-edge dependent upon the channel yield, and pixels which are not confined by an edge are disseminated to a comparative grouping. Fig1 :( b) exhibits the cutoff points of related regions ensuing to applying Prewitt's channel (x3.4.2) and discarding all non-edge parts containing under 500 pixels. (More purposes of intrigue will be given in x4.2.) Finally, region based division estimations work iteratively by assembling pixels which are neighbors and have tantamount regards and part social affairs of pixels which are exceptional in regard. Fig 1(c) shows the cutoff points conveyed by one such estimation, in light of the possibility of watersheds, about which we will give more purposes of enthusiasm for x4.3. Note that none of the three systems appeared in Fig:1 has been absolutely compelling in separating the muscle fibers picture by setting a point of confinement between each close-by consolidate of strands. Each methodology has specific insufficiencies. For example, in Fig 1(a) limits are all around set, be that as it may others are truant. In Fig 1(c), in any case, more cutoff points are accessible, and they are smooth, yet they are not for the most part in unequivocally the right positions.
K -MEANS CLUSTERING
Image segmentation is the classification of an image into different groups. Many researches have been done in the area of image segmentation using clustering. K -means clustering algorithm is an unsupervised algorithm and it is used to segment the interest area from the background. The algorithm uses a similarity metric to assign all documents to one of k clusters. The clusters are represented as an average of all documents contained within the cluster.
Fig1: (a), (b) and (c): Segmentation
This normal can be thought of as the centroid of the group. K-implies calculation pick k focuses as starting bunching focuses, distinctive focuses may get diverse arrangements. With a specific end goal to reduce the affectability of starting point decision, we utilize a media, which is the most halfway found question in a group, to acquire better introductory focuses. The request of stochastic examining is normally inclination the example to almost speak to the first dataset, in other words, tests drawn from dataset can't cause mutilation and can reflect unique information's appropriation. So as to decrease the impact of test on picking beginning stages, following systems are utilized. In the first place, drawing numerous sub-tests (say J) from unique dataset (the span of each sub-test isn't more than the ability of the memory, and the whole for the measure of J sub-tests is as close as conceivable to the extent of unique dataset) . Second, utilize K-implies for each sub-test and delivering a gathering of strategies individually. At long last, contrasting J arrangements and picking one gathering having negligible estimation of square blunder work as the refined starting focuses. To abstain from isolating one major bunch into at least two ones for receiving square-mistake paradigm, we accept the quantity of grouping is K' (K > K, K' relies upon the adjust of bunching quality and time). When all is said in done, greater K' can extend seeking zone of arrangement space, and lessen the circumstance that there are no underlying qualities close to some outrageous. Along these lines, re-bunching the dataset through K implies with the picked beginning conditions would create K' medians, at that point blending K' groups (which are closest groups) until the quantity of bunches diminished to k.
FLOW CHART:
© 2018, IRJET | Impact Factor value: 6.171 | ISO 9001:2008 Certified Journal | Page 4143
Chart -1: Work FlowFig -1: Free Space Orientation
Fig -2: Detecting of vehicle
WALL CLASIFIACTION
(a)
[image:3.595.93.553.83.577.2](b)
Fig -3: (a) and (b) Separation of wall
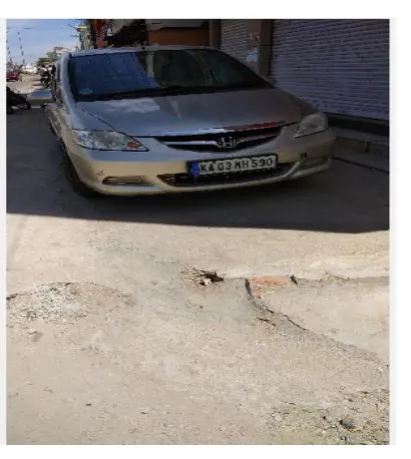
OBJECT IDENTIFICATION
The recognizable proof and following after items amid the stopping technique are being performed utilizing the Lucas-Kanade Optical calculation. For distinguishing the items, the framework tracks after extraordinary changes in the earth Fig:4(a) and (b) demonstrates the articles were recognized.
TOP VIEW
[image:3.595.289.559.95.524.2] [image:3.595.35.288.609.748.2]© 2018, IRJET | Impact Factor value: 6.171 | ISO 9001:2008 Certified Journal | Page 4144
Fig: 4(a)The principal pre-handling step that was performed in our procedure is the Homography change which has the goal to change the perspective of the information picture. Tests of got results can be appeared in Fig. 2. Another goal of this change is to lessen the impacts of the point of view mutilation caused by the long separations to the camera which can influence the nature of vision of the stopping spots, for example, the auto shapes or size. This change will likewise encourage the subsequent stage of stopping model extraction and endeavor to lessen the between places impediment issue, figure 5 Demonstrates the best view picture of the stopping framework.
[image:4.595.262.566.36.532.2]Fig: 4(b)
Fig -4: Decting objects (a) and (b).
Fig 5 -: Top View Orientation
Picture: Occupying parking space
[image:4.595.63.269.72.302.2] [image:4.595.42.568.468.764.2] [image:4.595.320.551.543.746.2]© 2018, IRJET | Impact Factor value: 6.171 | ISO 9001:2008 Certified Journal | Page 4145
3. CONCLUSIONS
Picture division calculation and the vision calculation to obstruction inside the stopping checking to enhance stopping opening perceive precision. Through contrasted and the Hough change, the proposed technique utilizing the edge discovery calculation is joined with picture to enhance the coherence and culmination of the protest location result and control the quantity of wrong discoveries.
The vision framework facilitates has real issue as the picture in dim and light powers may vary by camera, one of enhancing the nature of picture by utilizing top notch cameras that suits for the dull and different light forces. Which help in stopping at free space, subsequently better choices bring through the vision framework, it is a remote and simple to set up and utilize a dream framework that gives comes about in light of camera pictures.
REFERENCES
[1] V.W. S. Tang, Y. Zheng, and J. Cao, "An Intelligent Car Park Management System based on Wireless Sensor Networks," Proceedings of the 1st International Symposium on Pervasive Computing and Applications, pp. 65-70, Aug 2006.
[2] Sheng-Fuu Lin , Yung-Yao Chen , "A vision-based parking lot management system"., 2006 IEEE Conference on Systems, Man, and Cybernetics. Peter. C, pp. 2897-902, Oct. 2006.
[3] K. Blumer, H. R. Halaseh, M. U. Arsan, H. Dong, and N. Mavridis, “Cost-effective single-camera multi-car parking monitoring and vacancy detection towards real-world parking statistics and real-time reporting,” in Proc. Neural Inf. Process., 2012, pp. 506–515.
[4] C. C. Huang and S. J. Wang, “A hierarchical Bayesian generation framework for vacant parking space detection,” IEEE Trans. Circuits Syst. Video Technol., vol. 20, no. 12, pp. 1770–1785, Dec. 2010.
[5] H. Ichihashi, T. Katada, M. Fujiyoshi, A. Notsu, and K. Honda, “Improvement in the performance of camera based vehicle detector for parking lot,” in Proc. IEEE Int. Conf. Fuzzy Syst., 2010, pp. 1950–1956.
[6] W. Lixia and J. Dalin, “A method of parking space detection based on image segmentation and LBP,” in Proc. 4th IEEE Int. Conf. Multimedia Inf. Netw., 2012, pp. 229–232.
[7] Automatic Parking Identification and Vehicle Guidance with Road Awareness, 2016 ISCEE International Conference on the Science of Electrical Engineering
[8] Shen-En Shih, “A Convenient Vision-Based System for Automatic Detection of Parking Spaces in Indoor Parking Lots Using Wide-Angle Cameras”, IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 63, NO. 6, JULY 2014
[9] H. Al-Kharusi and I. Al-Bahadly. "Intelligent Parking Management System Based on Image Processing." World Journal of Engineering and Technology 2014 (2014).
[10] Wang, C., Zhang, H., Yang, M., Wang, X., Ye, L. and Guo, C. (2014). “Automatic Parking Based on a Bird's Eye View Vision System”, Advances in Mechanical Engineering, 6, 847406.
[11] Suhr, J. K., Bae, K., Kim, J., and Jung, H. G. (2007, May). Free Parking Space Detection Using Optical Flow-based Euclidean 3D Reconstruction. In MVA (pp. 563-566).
[12] Wahl, E., and Therburg, R. D. "Developing a motion-stereo parking assistant at bmw." MATLAB Digest 2008.
[13] Imen Masmoudi, Vision based System for Vacant Parking Lot Detection, University of Sfax.
[14] Nadav and E. Katz, “Off-road Path and Obstacle Detection using Monocular Camera”, Accepted to International Conference on the Science of Electrical Engineering (ICSEE), 2016 IEEE 29th Convention of, November 16 – 18 2016, Eilat, Israel.
[15] Lee S, Hyeon D, Park G, et al. “Directional-DBSCAN: Parking-slot detection using a clustering method in around-view monitoring system” IEEE Intelligent Vehicles Symposium , pp. 349-354 ,2016.
© 2018, IRJET | Impact Factor value: 6.171 | ISO 9001:2008 Certified Journal | Page 4146
BIOGRAPHIES
Santhosh D K is an Mtech. student of Maharaja Institute of Technology Mysore.