International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
215
Optimization of Hybrid PV/Wind/Battery system using
Adaptive Genetic Algorithm-PID Controller
Dr. S B Shivakumar
1, Sampathkumar.V. Patil
2 1Principal, Department of Electrical Engineering, PDIT, Hosapete
2Research Scholar, Department of Electrical Engineering, VTU, Belagavi
Abstract— This paper proposes the optimal design
methodology to optimize the configuration of hybrid energy system.Due to cost effectiveness and realibility we use hybrid systems.In these paper we are representing Wind-Turbine/PV as a Hybrid RES because of its several advantages. To enable quality power delivery and reliable power transmission enabling efficient charging and discharging of the battery system, also called Energy Management System (EMS) plays decisive role. Load side variation often causes power outage and even faults in overall grid network. To alleviate such issues, in this research paper a load sensitive adaptive-EMS control model is developed that considers both load side variations as well as non-linear generation patterns. Unlike traditional control measure, our proposed system uses enhanced Evolutionary Computing (EC) algorithms such as Adaptive Genetic Algorithm (AGA) to enable optimal PID tuning so as to enable dynamic charging and discharging control of the EMS in proposed Hybrid-RES system.
Keywords—Renewable Energy Sources, Wind-urbine,
Photovoltaic, Hybrid-RES, Load Sensitive EMS control, Evolutionary Algorithms, Adaptive Genetic Algorithm
I. INTRODUCTION
In present day scenario, undeniably the existence of a better human life by means of varied civil purposes, industries, scientific and defense system can‟t be imagined without electricity. The exponential rise in the demand of electricity has motivated academia-industries to explore and achieve sufficient amount of energy to fulfill the civil-industrial as well as scientific-defense related requirements. On the other hand, the depletion of traditional fossils fuels has also alarmed scientific society to obtain other eco-friendly energy solutions [1] [2]. To enable potential energy solution, Renewable Energy Sources (RESs) such as Wind-Turbine (WT), Photovoltaic (PV) cells, and hydro-electric power generation have emerged as the potential alternatives. To further exploit the efficacy of these power systems, in last few years hybrid generation systems have been suggested that employs multiple RESs (say, RESs interconnection) to generate sufficient electric energy [3] [4]. Wind Turbine RES often gets affected due to variations in wind speed, while in Photovoltaic power systems; change in radiation pattern over time influences Energy Conversion Ratio (ECR) of the RES system.
It states that the changing patterns of the RES power generators are dependent on the environmental conditions such as wind speed and solar radiation. Different generation patterns of the RES makes overall power generation and transmission higher complicate and tough task. Facilitating quality power generation and reliable transmission to the customers has always been a problem for power generation and transmission companies. It becomes tougher under non-linear generation and load variation conditions. On the other hand, load variations to increases the probability of power outage and fault proneness across power system. To alleviate such problems, deriving a novel power control strategy by considering both the load side variations as well as power generation non-linearity conditions might be of paramount significance. One potential approach can be the consideration of load variation and accordingly controlling EMSs charging and discharging process and generator side control. This strategy can significantly help in augmenting generation process by targeting Maximum Power Point (MPP) achievement, according to load changes. On the other hand, controlling charging and discharging of the battery systems can also make overall EMS efficient to meet power demands even under varying load conditions. As already stated, RESs are highly sporadic in nature. In different geographical places, the accessibility of such energy sources differs significantly in dissimilar environmental places. In the similar place, the quantity of production also varies on the basis of the time of day, season, and climate situations. A grid with elevated RE diffusion requires to construct enough energy storage, to make sure an continuous supply to end consumers and create the finest employ of produced energy [5][6]. The different categories of energy storages are namely, super- capacitors, flywheels, chemical batteries, pumped hydro, hydrogen, and compressed air [7-12].
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
216
This is done through the Evolutionary Computing Algorithm approach,in which Adaptive Genetic Algorithm(AGA) is used for the tuning of PID parameters,through which charging and discharging of EMS is controlled,which is turn generation side and load side balance may opt.II. OUR CONTRIBUTION
Taking into consideration of the inevitable need of a robust load sensitive EMS control model for Hybrid-RES systems, in this research paper emphasis is made on enabling swift and efficient control decision by considering both non-linear power generation pattern as well as load side variations. Our proposed model, as Hybrid-RES encompasses WECS and Photovoltaic cells as power generators, while Nickel-Cadmium batteries are considered as power storage device. Considering control mechanism to assist reliable power generation and transmission (say, delivery) to the customers, we emphasize on enabling efficient charging and discharging control of the EMS system where realizing power-system dynamics both the generation pattern as well as load side variations are taken into consideration. Unlike major existing approaches where either PI or PID controllers are used to control generator side parameters such as WT speed control or pitch angle control, or even EMS charging-discharging control, we have enhanced PID parameters using EC approaches. Non-deniably, the classical approaches with static PID parameters (i.e., gain parameters) can‟t be optimal for control functions, particularly under dynamic load or generation conditions. Realizing such limitations of the existing approaches and taking it as motivation, in our research enhanced EC schemes such as AGA is applied to perform on-line PID parameter tuning to assist swift EMS control and stabilization. Unlike classical Genetic Algorithm (GA), our proposed AGA algorithm applies adaptive GA parameter assignment such as adaptive probability of crossover and mutation. It enables swift convergence that in practice alleviates the issue of local minima and convergence. Some of the key contributions of this research paper are:
1.Hybrid-RES based Power system
2.Consideration of both the non-linear power generation patterns as well as dynamic load variations to control EMS functions
3.Enhanced EC algorithms (AGA) based PID
parameter tuning to assist online EMS control.
III. SYSTEM MODEL
This section primarily discusses the key components of the proposed Hybrid-RES systems and algorithmic optimization to achieve optimal non-linear generation and load sensitive EMS control.
3.1 System modeling
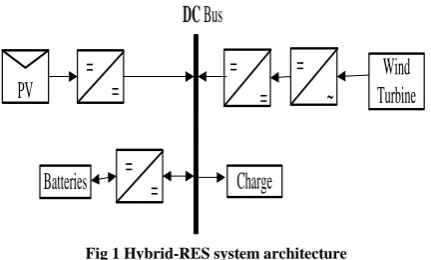
Typically, the hybrid system is considered to maintain a load power to be lower. In our proposed design WECS contains wind-turbine of 3kW power capacity. Similarly, the considered PV module is a single diode design having power generation capacity of 1kW. The difference between the power generated by RESs and the power required by the load over a period of time can be minimized by means of sizing. In our hybrid-RES design a stand alone or public network connected with multi RESs are considered. Hybrid-RES structure applied in this research work operates autonomously and supplies power to the DC bus in series with the RESs. In addition, it can supply power to the batteries, directly [42]. An illustration of hybrid-RES system containing WECS and PV modules is given in Fig.1. The considered simple structure, supplies power to the load continuously and facilitates a good charging and discharging control
PV
=
=
Wind
Turbine
Batteries
Charge
=
~
=
=
DC
Bus
[image:2.595.323.539.426.556.2]=
=
Fig 1 Hybrid-RES system architecture
The following sub-sections briefs about different components used in our proposed Hybrid RES systems and their functional characteristics.
3.2 The DC bus
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
217
ChargePV System
Storage System
Wind System
[image:3.595.48.278.141.281.2]Continuous bus
Fig 2 Coupling of the different components, PV, WECS and Battery units
(1)
3.3 Energy Management in Hybrid-RES Power Systems
In practice, the energy management of the different sources is one of the most intricate tasks in Hybrid-RES system. This is because of the non-linear generation pattern, voltage degradation in grid network and dynamic load variation. The overall proposed EMS system intends to optimize or augment the usage of the energy generated through the different RESs. Some of the key objectives are given as follows:
- To fulfill dynamic energy demands from load side;
- To perform load sensitive adaptive charging-discharging control;
- To minimize charging and discharging cycles of the battery;
- To limit the excessive charging and discharging of the battery;
- To limit the discharging or loading of the battery above its maximum charge or discharge.
To accomplish above mentioned objective in this research work enhanced EC algorithms such as AGA is developed which assists PID controller‟s parameter tunning that eventually lead optimal and swift control of the battery charging and discharging. Our proposed algorithm generates the degree of involvement of the distinct RESs to meet the demands from load side in terms of power. Retrieving dynamic knowledge about the required bus voltage, it becomes easy to achieve the current references for controlling individual RES. Further, the DC/DC converters assure the control of the currents of different RESs to the reference currents by maintaining the DC bus voltage fixed.
3.3.1 EMS Control systems
Undeniably, controlling EMS charging and discharging is a highly intricate but inevitable task. Here, these functions operate on the basis of certain conditions and system states such as generation patterns and the load side demands.
To perform it, certain rules are required to be incorporated based on which the instant system state can be obtained and accordingly charging-discharging control could be performed. For illustration, in WECS a functional speed control unit employs the data of the knowledge about the speed of the motor shaft and compares it with the reference data based on which it executes rules to increase or decrease the power of the motor. Similarly, in charging-discharging control of the EMS system exploring load information plays decisive role. Unlike traditional approaches where merely the load variation is taken as input to decide charging-discharging control, in our model both power generation pattern as well as load dynamics are taken as input to perform scheduling of the charging and discharging. To achieve it, we have applied PID controller due to its ability to perform swift control decision in real-time environment. A snippet of PID controller is given as follows:
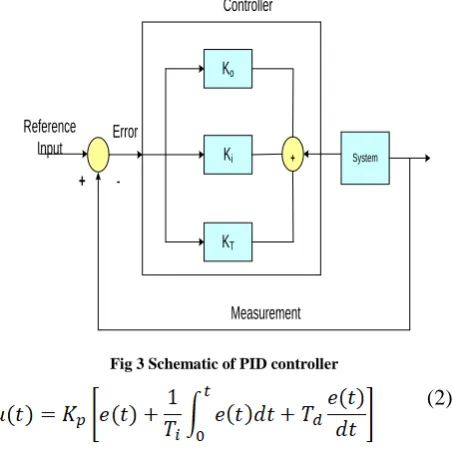
3.3.2 Proportional-integral-derivative (PID) controller
In present day industrial applications, PID controllers are the most commonly applied controllers, particularly for electrical or electronic system control. A simple schematic of the PID controller is given in Fig. 4. PID controller employs the continuous time and the transfer function to perform control functions [49]. In our proposed EMS control model PI controller with EC based parameter tuning is applied.
Ki
Ko
KT
+ System
Reference Input
+
-Error
Controller
Measurement
Fig 3 Schematic of PID controller
[image:3.595.319.546.472.707.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
218
(3)
This is the matter of fact that the robustness of PID controller enables it to be one of the prominent alternatives for EMS control; however the static or fixed gain parameter of the classical PID confines its suitability, particularly under those conditions like exceedingly dynamic non-linear generation and load variation. To deal with these limitations, optimal PID parameter selection and tuning can be of paramount significance. With this motivation, in this research work we have applied enhanced EC algorithms such as AGA to perform PID parameter running in real-time environment.
Being evolutionary computing algorithm, requires an objective function to perform PID parameter tuning. Evolutionary algorithms intend to maximize objective function iteratively to achieve optimal or near-optimal solution. In our proposed model, Integral Time Absolute Error (ITAE) is applied as objective function to optimize the PID tuning parameters. A brief of the ITAE objective function is given as follows:
3.3.3 Objective function (OF)
Generally, there are numerous indices applied to assess PID controller performance. Some of these indices are; Integral Square Error (ISE), Integral Absolute Error (IAE), ITAE, and Mean Square Error (MSE). In this paper, we have applied ITAE reduction as the objective function to perform PID parameter tuning, where AGA tries to reduce ITAE iteratively to achieve optimal PID parameters so as to enable swift and efficient EMS control. The efficiency or capability of ITAE to avoid long duration transient makes ITAE suitable for our study. Mathematically, ITAE is given in equation (16), which is obtained as the difference between the load power and the generated power.
(4)
Noticeably, once achieving the minimum objective function , the respective PID parameters are selected and based on which the charging and discharging control is performed using PID controller. In addition to the above mentioned, ITAE based PID parameter tuning, in our model as supplementary enhancement, we have applied EC-PID scheme (i.e., enhanced EC based PID controller) for Wind-Turbine speed control.
[image:4.595.316.547.277.522.2]In this case equation (16) characterizes the objective function as the error between the reference speed and the actual speed of the PMSG WECS. Now, applying above mentioned objective functions, we have performed PID (tuning) parameter optimization using AGA algorithm. A brief of the EC schemes applied in this research work is given in the following sub-sections. In this paper, the emphasis is made on applying EC schemes mainly for EMS control optimization to avoid any outage probability and to facilitate quality power to the customers.
Fig. 5 Evolutionary Computing assisted PID controller for EMS
3.4 Evolutionary Computing Algorithms
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
219
Exploring in depth it can be found that the classical EC algorithms such as generic GA suffers from the local minima or convergence that confines suitability of these algorithms for real time applications. The classical GA algorithm usually suffers from the issues like local minima and convergence and undeniably imposes computational overheads due to iterative population generation and (iterative) addition. It leads saturation of the model. To alleviate these issues in this research our proposed AGA enables adaptive crossover and mutation probability estimation to yield optimal solution. A brief of the EC algorithms is given as follows:3.4.1 Adaptive Genetic Algorithm (AGA):
In GA, a population of strings, also called chromosomes encode an individual solution for optimizing the result, evolves toward certain more efficient solutions. Noticeably, solutions are signified in binary form as the strings of zeros and ones. In GA process the evolution is started from a population where the individuals are generated randomly and the generation continues till stopping criteria. Here, in all iteration the fitness value of each population is obtained based on which the individuals with higher fitness are selected to provide solution. Further, the selected populations are altered by performing reproduction and mutation to generate a new generation having better fitness and proximity to the optimal solution. The newly obtained population is then processed in the next iteration to achieve better solution than the previous once and this process continues till the stopping criterion is obtained. It might continue iterating till the error ITAE error becomes minimal by maintaining generation and load demands equal. In our proposed AGA scheme, each PID tuning parameters (i.e., P and I gain parameters) are taken as population, where the size of population signifies the total number of individuals in each generation. In our model, the initial population is defined as a binary string and thus in EMS control design each gain parameter is considered to be the population which are represented in binary form 0‟s or 1‟s. These binary strings are applied to perform AGA based PID parameter tuning. These strings (0's and 1's) have been transferred to the two gain parameters to meet objective function. In
our optimization model ITAE is considered as the objective function that signifies how efficient the charging and discharging is taking place to meet dynamic load demands, while avoiding any generation side fault (by controlling WT speed). In addition to the fixed stopping criteria such as 100 number of generation, we have applied additional criteria that estimate the total number of populations having similar fitness value.
In our model, once 95% of the populations are having the same fitness value, optimization program terminates and the obtained gain parameters are assigned to the PID controller to perform control decision.
A brief of the key functions of AGA is given as follows:
a. Selection
In AGA, the fitness function is calculated based on the OF, which is decided to be the ITAE error parameter (15). Obtaining the fitness value, each member in the population is ranked using AGA selection function. Here, the parent individuals with higher fitness values retain its place for reproduction to form next generation. Here, we have applied Roulette wheel selection technique. In summary, the individual with higher fitness value would have higher probability to be selected for “reproduction”.
b. Reproduction
Reproduction process signifies the phenomenon of defining how AGA generates each solution in each generation of the evolution. This process encompasses two steps, crossover and mutation, where in crossover, two parent individuals are combined to constitute a new individual. Mutation simulates the affect of errors that take place with low probability during replication. The optimal selection of the two GA parameters, crossover and mutation probability play vital role. The optimal selection of the GA parameters and can enable preserving the diversity of GA to avoid local minima. Excessively higher value of these GA parameters can make the approach a primitive random search model. Classical GA applies static of fixed value of and that result into problems like convergence and local minima. Additionally, it introduces significantly high computational time and cost.
(5)
In , signifies the present crossover probability in kth generation, while signifies the mutation probability at kth generation. and present the non-zero positive constants. We have used
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
220
Here, PID parameter tuning or optimization continues till the stopping criterion, i.e., total number of epoch or till 95% of the chromosomes obtains the equal fitness value. Exceeding stopping criteria might lead system saturation. Fig. 10 presents the overall process of the AGA based PID tunning for EMS control.Start
Initialization
Generate Initial population
Stopping Critera?
Evaluate Objectuve/ Fitness function
Initialize loop for finding current best
i=i+1
i < popsize
Is the current fitness value better than pBest value
Assign current fitness value to
pBest
End
Generate new population on the basis of current best
value
Start two individuals Parent 1 : parent 2
Crossover Select one
offspring Mutation Assign Fitness
Is crossover finished? Is mutation
finished? Generate new
population
No
Yes
No
Yes
No
Yes No
Yes Yes
No
[image:6.595.65.264.213.434.2]
Fig. 6. AGA based optimization
Thus, applying above discussed EC-AGA algorithm, PID parameter tuning has been performed to achieve optimal EMS control. In this paper, in addition to the AGA based PID tuning, we have applied other evolutionary computing approach to perform PID tuning.
IV. RESULTS AND DISCUSSION
Considering the significance of a robust EMS control model for Hybrid-RES system, in this work the emphasis was made on exploiting both load variations and non-uniform generation pattern to perform optimal charging and discharging control. Here, unlike traditional PID based control, EC based PID control was developed, where different EC algorithm such as AGA is applied to enhance PID gain parameters so as to perform swift or transient decision for EMS control. At first, to derive a Hybrid-RES power system, we modeled Wind-Turbine Energy Conversion system (WECS) and Photovoltaic (PV) cells, where WECS was developed for the specification of 3kW generation power, 50 Hz frequency and 440 V supply. Noticeably, here we used PMSG wind turbine of 3kW power. Similarly, PV cell of 1 kV was used to derive PV power system, with traditional Perturb and Observe (PO) Maximum Power Point Tracking (MPPT) facility.
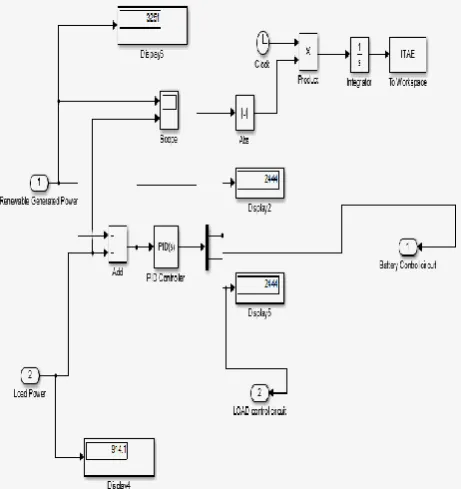
[image:6.595.326.533.346.521.2]In addition to the power generation units other key components, such as DC/DC Buck converter, DC-DC Bidirectional converter, and Nickel-Cadmium Battery Storage System (BSS), two circuit breakers (for charging and discharging control), PID controller (for EMS control as well as speed control of WECS), and AGA algorithm. The overall models were developed using MATLAB 2015a/SIMULINK tool. As depicted we used DC/DC converter to connect PV cells with DC bus, while bidirectional converters were used in wind-turbine interface to the DC bus. To examine the efficacy of the proposed EC based EMS control, we simulated proposed Hybrid-RES system in three distinct simulation cases; first EMS control using classical PID control with predefined gains (P=1, I=1), second, using AGA tuned PID based EMS control for EMS control under dynamic load and generation patterns.
Fig 7 Developed Hybrid-RES system comprising Wind-Turbine and Photovoltaic Cells
Considering rotor side controllability to assist reliable power generation, initially PID was used. The simulation with different control mechanisms and respective outcomes are discussed as follows:
A. Classical PID Based EMS Control
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
[image:7.595.52.313.126.727.2]221
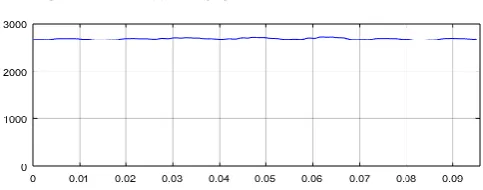
As stated the WECS under consideration has the maximum generation power of 3kW, initial power generation is found to be approximate 2700 Watts.. Here, the continuous 440 Volt power is generated . Similarly, the generation pattern of the PV cells also depicts power generation in the range of 460 Watts to 680 Watts, while the maximum generation capacity is 1kW. [image:7.595.316.543.153.611.2]Fig 8 WECS generated power (W) with classical PID control
Fig 9 PV cell generated power (W) with classical PID
[image:7.595.72.266.225.296.2]Fig 10 PV cell generated current (A) with classical PID
Fig 11 PV cell generated (above) and current (below) (W) with PID
[image:7.595.319.541.253.462.2]Fig 12 Hybrid-RES generated power (W) with classical PID control
Fig 13 Load side power (W) demand variation
Fig 14 Speed control (r/s) with reference to PID
Fig 15 Charging and Discharging control with reference to PID based EMS control
B. AGA- PID Based EMS Control
[image:7.595.55.274.440.704.2] [image:7.595.314.556.622.717.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
222
Fig 17 WECS generated current (A) with AGA-PID controller [image:8.595.314.556.124.353.2]Fig 18 WECS Generated Voltage with AGA-PID Controller
Fig 19 PV Power/voltage/current (from top to bottom) performance
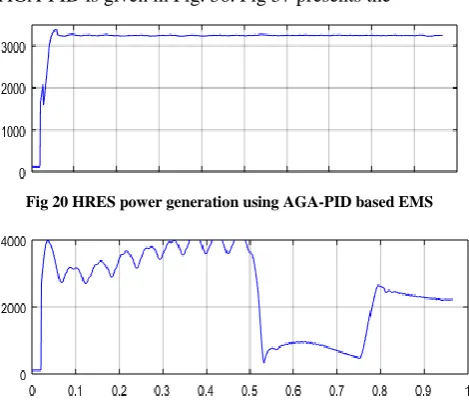
[image:8.595.56.274.138.472.2]The overall power generated by HRES model with AGA-PID is given in Fig. 36. Fig 37 presents the
Fig 20 HRES power generation using AGA-PID based EMS
[image:8.595.318.558.257.346.2]Fig 21 HRES load side power demand’s variaiotn using AGA-PID
Fig 22 WT speed control with AGA-PID assisted EMS for Hybrid-RES system
Fig 23 Charging and discharging control with AGA-PID assisted EMS for Hybrid-RES system
Fig. 22 presented WT speed control with AGA-PID assisted EMS for Hybrid-RES system, while EMS charging and discharging performance using our proposed AGA-PID controller is given in Fig. 23. As depicted in above, it can be found that AGA based PID controller enables significant augmentation in speed control of the hybrid-RES that as a result makes combined power generation stable. On the other hand, the outcomes (below graphs) signify that the use of AGA-PID makes power delivery more stable than the generic PID based controller. The augmented power supply signifies the efficacy of the proposed charging and discharging control. It states the efficiency of the proposed AGA-PID controller to achieve efficient energy management
V. CONCLUSION
[image:8.595.49.284.504.708.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 7, Issue 10, October 2017)
223
Realizing significance of Proportional-Integral-Derivative (PID) controller for real time industrial purposes, in this paper it has been applied to control both EMS as well as wind-turbine speed. However, to alleviate the issue of online PID parameter tuning for efficient charging and discharging control of the EMS, evolutionary computing algorithm named Adaptive Genetic Algorithm (AGA) have been applied. The PID parameter tuning (or optimization) makes overall control decision swift and efficient that eventually alleviates the probability of the power outage and faults. Simulation results affirm that the proposed AGA based PID controller provides more stable and efficient (quality) power delivery irrespective of generator side fluctuation and dynamic load demands. In future, more efficient evolutionary computing approaches could be explored for their efficacy to perform EMS control along with generator side control to assist reliable and quality power supply.REFERENCES
[1] G. Shafiullah, M. Amanullah, A. ShawkatAli, P. Wolfs P. (February 2013), Smart Grid for a Sustainable Future, Smart Grid and Renewable Energy, Scientfic Research, pp. 23-34.
[2] S. Collier, “Ten steps to a smarter grid,” IEEE Ind. Appl. Mag., vol.
16, no. 2, pp. 62–68, 2010.
[3] J. A. Turner, “A realizable renewable energy future,” Sci., vol. 285, no. 5428, pp. 687–689, 1999.
[4] T.Wiedmann and J. Minx, A Definition of „Carbon Footprint‟.
Hauppauge, NY, USA: Nova Science, 2008.
[5] J. Carrasco, L. Franquelo, J. Bialasiewicz, E. Galvan, R. Guisado, M.
Prats, J. Leon, and N. Moreno-Alfonso, “Power-electronic systems for the grid integration of renewable energy sources: A survey,” IEEE Trans. Ind. Electron., vol. 53, no. 4, pp. 1002–1016, 2006.
[6] H. Ibrahim, A. Ilinca, and J. Perron, “Energy storage systems – characteristics and comparisons,” Renewable Sustainable Energy Rev., vol. 12, no. 5, pp. 1221–1250, 2008.
[7] J. Garcia-Gonzalez, R. de la Muela, L. Santos, and A. Gonzalez, “Stochastic joint optimization of wind generation and pumped-storage units in an electricity market,” IEEE Trans. Power Syst., vol. 23, no. 2, pp. 460–468, 2008.
[8] T. D. Nguyen,K.-J. Tseng, S. Zhang, and T. D. Nguyen, “On the modeling and control of a novel flywheel energy storage system,” in Proc. IEEE ISIE, 2010, pp. 1395–1401.
[9] H. Zhou, T. Bhattacharya, D. Tran, T. Siew, and A. Khambadkone, “Composite energy storage system involving battery and ultracapacitor with dynamic energy management in microgrid applications,” IEEE Trans. Power Electron., vol. 26, no. 3, pp. 923– 930, 2011.
[10] S. G. Chalk and J. F. Miller, “Key challenges and recent progress in
batteries, fuel cells, and hydrogen storage for clean energy systems,” J. Power Sources, vol. 159, no. 1, pp. 73–80, 2006.
[11] J. Barton and D. Infield, “Energy storage and its use with intermittent renewable energy,” IEEE Trans. Energy Conversion, vol. 19, no. 2, pp. 441–448, 2004.
[12] K. G. Vosburgh, “Compressed air energy storage,” J. Energy, vol. 2,
no. 2, pp. 106–112, 1978.
[13]
[14] C. Abbey and G. Joos, “Supercapacitor energy storage for wind
energy applications,” IEEE Trans. Ind. Appl., vol. 43, no. 3, pp. 769– 776, 2007.
[15] P. Brown, J. P. Lopes, andM.Matos, “Optimization of pumped storage
capacity in an isolated power system with large renewable penetration,” IEEE Trans. Power Syst., vol. 23, no. 2, pp. 523–531, 2008.
[16] C. Abbey and G. Joos, “A stochastic optimization approach to rating
of energy storage systems in wind-diesel isolated grids,” IEEE Trans. Power Syst., vol. 24, no. 1, pp. 418–426, 2009.
[17] Y. Zhang, N. Gatsis, and G. Giannakis, “Robust energy management
for microgrids with high-penetration renewables,” IEEE Trans. Sustainable Energy, vol. PP, no. 99, pp. 1–10, 2013.
[18] OnurOzdal MENGI, Ismail HakkıALTAS,“Fuzzy logic control for a
wind/battery renewable energy production system” Turk J ElecEng& Comp Sci, Vol.20, No.2, 2012.
[19] T. Lu, Z. Wang, Q. Ai and W. J. Lee, "Interactive Model for Energy Management of Clustered Microgrids," in IEEE Transactions on Industry Applications, vol. 53, no. 3, pp. 1739-1750, May-June 2017.
[20] T. A. Nguyen and M. L. Crow, "Optimization in energy and power management for renewable-diesel microgrids using Dynamic Programming algorithm," 2012 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Bangkok, 2012, pp. 11-16.
[21] S. Sikkabut et al., "Control strategy of solar/wind energy power plant with supercapacitor energy storage for smart DC microgrid," 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, 2013, pp. 1213-1218.
[22] Bouharchouche, E. M. Berkouk and T. Ghennam, "Control and energy
management of a grid connected hybrid energy system PV-wind with battery energy storage for residential applications," 2013 Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, 2013, pp. 1-11.
[23] M. Trifkovic, M. Sheikhzadeh, K. Nigim and P. Daoutidis,
"Hierarchical control of a renewable hybrid energy system," 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, 2012, pp. 6376-6381.
[24] S. Kumaravel and S. Ashok, "Adapted multilayer feedforward ANN based power management control of solar photovoltaic and wind integrated power system," ISGT2011-India, Kollam, Kerala, 2011, pp. 223-228.
[25] N. Varghese and Reji P., "Battery charge controller for hybrid stand alone system using adaptive neuro fuzzy inference system," 2016 International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, 2016, pp. 171-175.
[26] Küçüker, T. Kamal, S. Z. Hassan, H. Li, G. MaazMufti and M.
Waseem, "Design and control of photovoltaic/wind/battery based microgrid system," 2017 International Conference on Electrical Engineering (ICEE), Lahore, 2017, pp. 1-6.
[27] Wei Deng, Xisheng Tang and Zhiping Qi, "Research on dynamic stability of hybrid wind/PV system based on Micro-Grid," 2008 International Conference on Electrical Machines and Systems, Wuhan, 2008, pp. 2627-2632.
[28] Yuanrui Chen and Jie Wu, "Agent-based energy management and control of a grid-connected wind/solar hybrid power system," 2008 International Conference on Electrical Machines and Systems, Wuhan, 2008, pp. 2362-2365.