BIROn - Birkbeck Institutional Research Online
Razgon, Igor (2014) No small nondeterministic read-once branching
programs for CNFs of bounded treewidth. In: Cygan, M. and Heggernes,
P. (eds.)
Parameterized and Exact Computation.
Lecture Notes in
Computer Science 8894. New York, U.S.: Springer, pp. 319-331. ISBN
9783319135236.
Downloaded from:
Usage Guidelines:
Please refer to usage guidelines at
or alternatively
No small nondeterministic read-once branching
programs for CNFs of bounded treewidth
Igor Razgon
Department of Computer Science and Information Systems, Birkbeck, University of London [email protected]
Abstract. In this paper, given a parameterk, we demonstrate an infinite class of
CNFs of treewidth at mostkof their primal graphs such that equivalent nonde-terministic read-once branching programs (NROBPs) are of size at leastnck
for some universal constantc. Thus we rule out the possibility of fixed-parameter tractable space complexity ofNROBPs parameterized by the smallest treewidth of equivalentCNFs.
1
Introduction
Read-once Branching Programs (ROBPs) is a well known representation of Boolean functions. ObliviousROBPs, better known as Ordered Binary Decision Diagrams (OBDDs), is a subclass ofROBPs, very well known because of its applications in the area of verifi-cation [2]. An important procedure in these appliverifi-cations is transformation of aCNFinto an equivalentOBDD. The resulting OBDDcan be exponentially larger than the initial CNF, however a space efficient transformation is possible for special classes of func-tions. For example, it has been shown in [3] that a CNFof treewidthk of its primal graph can be transformed into an OBDD of size O(nk). A natural question is if the
upper bound can be made fixed-parameter tractable i.e. of the formf(k)nc for some
constantc. In [8] we showed that it is impossible by demonstrating that for each suffi-ciently largekthere is an infinite class ofCNFs of treewidth at mostkwhose smallest OBDDis of size at leastnk/5.
In this paper we report a follow up result showing that essentially the same lower bound holds for Non-deterministicROBPs (NROBPs). In particular we show that there is a constant0 < c <1such that for each sufficiently largekthere is an infinite class ofCNFs of treewidth at mostk(of their primal graphs) for which the space complexity of equivalentNROBPs is at leastnck. Note thatNROBPs are strictly more powerful than ROBPs in the sense that there is an infinite class of functions having a poly-sizeNROBP representation and exponentialROBPspace complexity [4]. In the same sense,ROBPs are strictly more powerful than OBDDs, hence the result proposed in this paper is a significant enhancement of the result of [8].
the space complexity of readc-times branching programs [1] (for an arbitrary constant cindependent onk) w.r.t. the same class of functions.
To prove the proposed result, we use monotone2-CNFs (their clauses are of form
(x1 ∨x2) wherex1 andx2 are 2 distinct variables). These CNFs are in one-to-one
correspondence with graphs having no isolated vertices: variables correspond to vertices and two variables occur in the same clause if and only if the corresponding vertices are adjacent. This correspondence allows us to use theseCNFs and graphs interchangeably. We introduce the notion of Matching Width (MW) of a graphGand prove two theorems. One of them states that a monotone 2-CNF, whose corresponding graphGhasMWat leastt, cannot be computed by aNROBPof size smaller than2t/a, whereais a constant
dependent on the max-degree ofG. The second theorem states that for each sufficiently largek there is an infinite family of graphs of treewidthk and max-degree5 whose MWis at leastb∗logn∗kfor some constantbindependent ofk. The main theorem immediately follows from replacement oftin the former lower bound by the latter one. The strategy outlined above is similar to that we used in [8]. However, there are two essential differences. First, due to a much more ‘elusive’ nature ofNORBPs compared to that ofOBDDs, the counting argument is more sophisticated and more restrictive: it applies only toCNFs whose graphs are of constant degree. Due to this latter aspect, the target set ofCNFinstances requires a more delicate construction and reasoning.
Due to the space constraints, some proofs are either omitted or replaced by sketches.
2
Preliminaries
In this paper by aset of literalswe mean one that does not contain both an occurrence of a variable and its negation. For a setS of literals we denote byV ar(S)the set of variables whose literals occur inS. IfFis a Boolean function or its representation by a specified structure, we denote byV ar(F)the set of variables ofF. A truth assignment toV ar(F)on whichFis true is called asatisfying assignmentofF. A setSof literals represents the truth assignment toV ar(S)where variables occurring positively inS (i.e. whose literals inSare positive) are assigned withtrueand the variables occurring negatively are assigned withf alse. For example, the assignment{x1 ← true, x2 ←
true, x3←f alse}to variablesx1, x2, x3is represented as{x1, x2,¬x3}.
We define a Non-deterministic Read Once Branching Program (NROBP) as a con-nected acyclic read-onceswitching-and-rectifier network[4]. That is, aNROBP Y im-plementing (realizing) a functionF is a directed acyclic graph (with possible multiple edges) with one leaf, one root, and with some edges labelled by literals of the variables ofF in a way that there is no directed path having two edges labelled with literals of the same variable. We denote byA(P)the set of literals labelling edges of a directed pathPofY.
The connection betweenY andFis defined as follows. LetPbe a path from the root to the leaf ofY. Then any extension ofA(P)to the truth assignment of all the variables ofFis a satisfying assignment ofF. Conversely, letAbe a satisfying assignment ofF. Then there is a pathPfrom the root to the leaf ofY such thatA(P)⊆A.
(for any function that is not constantf alse): remove from the former all the nodes from which thetrueleaf is not reachable and relabel each edge with the appropriate literal of the variable labelling its tail (if the original label on the edge is1then the literal is positive, otherwise, if the original label is0, the literal is negative).
We say that aNROBPY isuniformif the following is true. Letabe a node ofY and letP1andP2be2paths from the root ofY toa. ThenV ar(A(P1)) =V ar((A(P2)).
That is, these paths are labelled by literals of the same set of variables. Also, ifP is a path from the root to the leaf ofY thenV ar(A(P)) =V ar(F). Thus there is a one-to-one correspondence between the sets of literals labelling paths from the root to the leaf ofY and the satisfying assignments ofF.
All theNROBPs considered in Sections 3-5 of this paper are uniform.This as-sumption does not affect our main result because, using the construction described in the proof sketch of Proposition 2.1 of [6], an arbitraryNROBPcan be transformed into a uniform one at the price of O(n)times increase of the number of edges. For the technical details, see the appendix of [7].
Given a graphG, itstree decompositionis a pair(T,B)whereT is a tree andBis a set of bagsB(t)corresponding to the verticestofT. EachB(t)is a subset ofV(G)and the bags obey the rules ofunion(that is,S
t∈V(T)B(t) =V(G)),containment(that is,
for each{u, v} ∈E(G)there ist∈V(t)such that{u, v} ⊆B(t)), andconnectedness (that is for eachu∈V(G), the set of alltsuch thatu∈B(t)induces a subtree ofT). Thewidthof(T,B)is the size of the largest bag minus one. The treewidth ofGis the smallest width of a tree decomposition ofG.
Given aCNFφ, its primal graphhas the set of vertices corresponding to the vari-ables ofφ. Two vertices are adjacent if and only if there is a clause of φwhere the corresponding variables both occur.
3
The main result
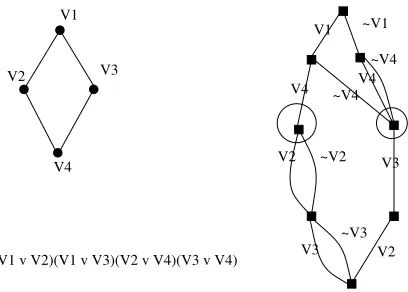
A monotone 2-CNFs has clauses of the form (x∨y) where x and y are two dis-tinct variables. SuchCNFs can be put in one-to-one correspondence with graphs that do not have isolated vertices. In particular, let G be such a graph. Then G corre-sponds to a 2CNF φ(G)whose variables are the vertices ofGand the set of clauses is{(u∨v)|{u, v} ∈ E(G)}. These notions, connected to the correspondingNROBP, are illustrated on Figure 1.1 It is not hard to see thatGis the primal graph ofφ(G), hence we can refer to the treewidth ofGas the primal graph treewidth ofφ(G).
The following theorem is the main result of this paper.
Theorem 1. There is a constantcsuch that for eachk≥50there is an infinite classG
of graphs each of treewidth of at mostksuch that for eachG∈G, the smallestNROBP
equivalent toφ(G)is of size at leastnk/c, wherenis the number of variables ofφ(G).
In order to prove Theorem 1, we introduce the notion ofmatching width(MW) of a graph and state two theorems proved in the subsequent two sections. One claims that if
1
V1 ~V1
V4 ~V4
V2 ~V2
V3 V1
V4
V2 V3
~V3
(V1 v V2)(V1 v V3)(V2 v V4)(V3 v V4)
V4 ~V4
V3
[image:5.612.139.343.113.259.2]V2
Fig. 1.A graph, the correspondingCNFand aNROBPof theCNF
the max-degree ofGis bounded then the size of aNROBPrealizingφ(G)is exponential in theMWofG. The other theorem claims that for each sufficiently largekthere is an infinite class of graphs of bounded degree and of treewidth at mostkwhoseMWis at leastb∗logn∗kfor some universal constantb. Theorem 1 will follow as an immediate corollary of these two theorems.
Definition 1. Matching width.
Let SV be apermutation ofV(G) and letS1 be aprefix ofSV (i.e. all vertices of
SV \S1 are ordered afterS1). The matching width ofS1 is the size of the largest
matching consisting of the edges betweenS1andV(G)\S1.2Thematching widthof
SV is the largestmatching widthof a prefix ofSV. Thematching widthofG, denoted bymw(G), is the smallest matching width of a permutation ofV(G).
Remark. The above definition of matching width is a special case of the notion of maximum matching widthas defined in [9].
To illustrate the above notions recall thatCn andKn respectively denote a cycle
and a complete graph ofnvertices. Then, for a sufficiently largen,mw(Cn) = 2. On
the other handmw(Kn) =bn/2c.
Theorem 2. For each integerithere is a constantaisuch that for any graphGthe size
ofNROBPrealizingφ(G)is at least2mw(G)/axwherexis the max-degree ofG.
Theorem 3. There is a constantbsuch that for eachk≥50there is an infinite class
Gof graphs of degree at most5such that the treewidth of all the graphs ofGis at most kand for eachG∈Gthe matching width is at least(logn∗k)/bwheren=|V(G)|.
Now we are ready to prove Theorem 1.
Proof of Theorem 1.LetGbe the class whose existence is claimed by Theorem 3. By Theorem 2, for eachG ∈ Gthe size of a NROBPrealizing φ(G)is of size at least2mw(G)/a5. Further on, by Theorem 3,wm(G)≥(logn∗k)/b, for some constant
b. Substituting the inequality formw(G)into the lower bound2mw(G)/a5 supplied by
Theorem 2, we get that the size of aNROBP is at least2logn∗k/c wherec = a5∗b.
Replacing2lognbyngives us the desired lower bound.
From now on, the proof is split into two independent parts: Section 4 proves Theo-rem 2 and Section 5 proves TheoTheo-rem 3.
4
Proof of Theorem 2
Recall that the vertices of graph Gserve as variables in φ(G). That is, in the truth assignments toV ar(φ(G)), the vertices are treated as literals and may occur positively or negatively. Similarly for a pathP of aNROBPZ implementingφ(G), we say that a vertexv∈V(G)occursonPif eithervand¬vlabels an edge ofP. In the former case this is apositive occurrence, in the latter case anegativeone.
Recall that a Vertex Cover (VC) of GisV0 ⊆ V(G)incident to all the edges of E(G).
Observation 1 S is a satisfying assignment ofφ(G)if and only if the vertices ofG occurring positively inS form aVC ofG. Equivalently,V0 ⊆ V(G)is the set of all vertices ofGoccurring positively on a root-leaf path ofZ if and only ifV0 is aVCof G.
In light of Observation 1, we denote the set of all vertices occurring positively on a root-leaf pathPofZbyV C(P).
The proof of Theorem 2 requires two intermediate statements. For the first state-ment, letabe a node of aNROBPZ. For an integert > 0, we callaat-node if there is a setS(a)of size at leasttsuch that for each root-leaf pathP passing througha, S(a)⊆V C(P).
Lemma 1. Suppose that the matching width ofGis at leastt. Thent-nodes ofZ form a root-leaf cut.
Proof.We need to show that each root-leaf pathP passes through at-node. Due to the uniformity ofZ, (the vertices ofGcorresponding to) the labels ofPbeing explored from the root to the leaf form a permutationSV ofV(G). LetSV0 be a prefix of the permutation witnessing the matching width at leastt. In other words, there is a matching M ={{u1, v1}, . . . ,{ut, vt}}ofGsuch that all ofu1, . . . , utbelong toSV0, while all
ofv1, . . . , vtbelog toSV\SV0. Letube the last vertex ofSV0and letabe the head of
the edge ofPwhose label is a literal ofu. We claim thatais at-node with a witnessing setS(a) ={x1, . . . , xt}such thatxi∈ {ui, vi}for eachxi.
Indeed, observe that for each{ui, vi}there isxi∈ {ui, vi}such thatxi∈V C(P)
for each root-leaf pathPpassing througha. Clearly for any root-leaf pathQofZ, either ui∈V C(Q)orvi ∈V C(Q)for otherwiseV C(Q)is not a VC ofGin contradiction
to Observation 1. Thus if suchxi does not exist then there are two pathsQ1 andQ2
meetingasuch thatV C(Q1)∩ {ui, vi}={ui}andV C(Q2)∩ {ui, vi}={vi}.
For a root-leaf pathQpassing throughadenote byQathe prefix ofQending with
andQ2
a. Indeed, assume w.l.o.g. thatui does not occur inQ1a. Then, by uniformity of
Z,ui occurs in¬Q1a. ThenPa+¬Q1a (we denote this way the concatenation of two
paths) is a root-leaf path with a double occurrence ofui, a contradiction toZ being
read-once. Similarly we establish thatvi occurs in both¬Q1a and¬Q2a. It remains to
observe that, by definition,uioccurs negatively inQ2aandvioccurs negatively in¬Q1a.
HenceQ∗ = Q2
a+¬Q1a is a root-leaf path ofZ such thatV C(Q∗)is disjoint with
{ui, vi}, a contradiction to Observation 1, confirming the existence of the desiredxi.
Suppose that there is a root-leaf pathP0 ofZ passing throughasuch thatS(a)*
V C(P0). This means that there isxi ∈/ V C(P0)contradicting the previous two
para-graphs. Thus beingaat-node has been established and the lemma follows.
For the second statement, letAandBbe two families of subsets of a universeU. We say thatA coversBif for each S ∈ B there is S0 ∈ A such thatS0 ⊆ S. If each element ofAis of size at leasttthen we say thatAis at-coverofB. Denote by
VC(G)the set of all VCs ofG.
Theorem 4. There is a functionfsuch that the following is true. LetHbe a graph. Let
Abe at-cover ofVC(H). The|A| ≥2t/f(x)wherexis the max-degree ofH.
The proof of Theorem 4 is provided in Subsection 4.1. Now we are ready to prove Theorem 2.
Proof of Theorem 2.LetNbe the set of allt-nodes ofZ. For eacha∈N, specify oneS(a)of size at leasttsuch that for all pathsP ofZ passing througha,S(a) ⊆
V C(P). LetS={S1, . . . , Sq}be the set of all suchS(a). Then we can specifydistinct
a1, . . . , aqsuch thatSi=S(ai)for alli∈ {1, . . . , q}.
Observe thatSis coversVC(G). Indeed, letV0∈VC(G). By Observation 1, there is a root-leaf pathP withV0 =V C(P). By Lemma 1,P passes through somea∈N and hence S(a) ⊆ V C(P). By definition,S(a) = Si fori ∈ {1, . . . , q}and hence
Si⊆V0. ThusSis at-cover ofVC(G).
It follows from Theorem 4 thatq =|S| ≥2t/f(x)wherexis a max-degree ofG
andf is a universal function independent onGort. It follows thatZ contains at least
2t/f(x)distinct nodes namelya
1, . . . , aq.
4.1 Proof of Theorem 4
We are going to define a probability distribution of VC(G)and to show that for a graphGof constant degree the probability of an element ofVC(G)to be a superset of a specific subset of size at leasttis exponentially small int. We then conclude that the number of such subsets covering all the elements ofVC(G)must be exponentially large int. In the technical details that follow, we do not use the probabilites explicitly but rather present the proof in terms of weighted counting.
(V0, E0, F00), where(V0, E0)are as above andF00=F∪NG(v), whereNG(v)is the
set of neighbours ofvin(V, E).
LetSV be a permutation of V. Now we are going to define a decision tree of
VC(G)w.r.t.SV, denoting it by T = TG,SV. It is a rooted binary tree with edges
directed from the parent to a child. If a nodeaofT has two children, we distinguish theleft childlchT(a)and theright childrchT(a)(the subscript can be omitted if clear
from the context). Ifa is a unary node, its only child is considered the leftone and the right child is not defined. We denote byTathe subtree ofT rooted bya. With this
notation in mind we defineT recursively as follows.
IfGis an empty graph thenTG,SV consists of a single node. Otherwise, letvf be
the first vertex ofSV,SV0 =SV \vf(the suffix ofSV0resulting from the removal of vf), andrtbe the root ofTG,SV. Ifvf ∈F(G)thenrtis a unary node, otherwisert
is a binary node. The edge(rt, lch(rt))is labelled withvf andTlch(rt)isTG\vf,SV0.
Ifrtis a binary node (the right child ofrtis defined) then(rt, lch(rt))is labelled with
¬vf andTrch(rt)=TG/vf,SV0.
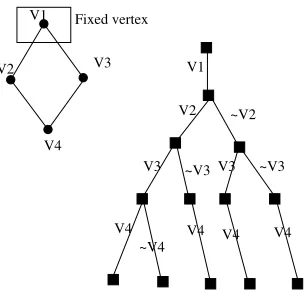
An example of a decision tree as defined above is provided in Figure 2.
V1
V2 ~V2
V3 ~V3 V3 ~V3
V4 V4 V4 V4
~V4 V1
V2 V3
V4
[image:8.612.137.290.325.475.2]Fixed vertex
Fig. 2. A tree TC,SV C where C is the graph on the left with F(C) = {v1}and SV C = (v1, v2, v3, v4). All the edges ofTS,SV C are directed to the bottom, hence the arrows on the
edges are not shown.
For a root-leaf pathP ofT, denote byV C(P)the set of vertices occurring posi-tively as labels of the edges ofP and letPT be the set of all root-leaf paths ofT.
Observation 2 The set{V C(P)|P∈P}T is preciselyVC(G).
LetS ⊆ V. Denote byPT ,S the set if all root-leaf paths P of T such thatS ⊆
V C(P). Let(a, b)be an edge ofT and letPbe a set of paths ofP, all starting from b. Then(a, b) +P={(a, b) +P|P ∈P}((a, b) +P denotes the concatenation of a single edge path(a, b)andP).
Lemma 2. Suppose thatGis not empty and letvf be the first vertex ofSV. Assume thatS is a DISdisjoint withF(G). Then the following statements are true regarding
PT ,S.
1. Ifvf ∈SthenPT ,S = (rt, lch(rt)) +PTlch(rt),S\{vf}.
2. Ifrtis a binary node andvf is a neighbour ofS then[PT ,S = (rt, lch(rt)) +
PTlch(rt),S]∪[(rt, rch(rt)) +PTrch(rt),S\{vn}]wherevnis the only neighbour of
vfinS(due toSbeing aDIS).
3. In all other casesPT ,S = (rt, lch(rt)) +PTlch(rt),Swhereverrtis a unary node
andPT ,S = [(rt, lch(rt)) +PTlch(rt),S]∪[(rt, rch(rt)) +PTrch(rt),S]wherever
rthas two children.
Proof.Assume thatvf ∈Sand letP ∈PT ,S. By our assumption aboutvf, it can
occur only as a label on the first edge. Sincevf ∈S, this occurrence must be positive. Consequently, the first edge is(rt, lch(rt)). Furthermore, the rest of the labels must be supplied by the suffix ofP starting atlch(rt). Hence we conclude that this suffix belongs toPTlch(rt),S\{vf}and henceP ∈(rt, lch(rt)) +PTlch(rt),S\{vf}. Conversely,
letP ∈(rt, lch(rt)) +PTlch(rt),S\{vf}. Thenvfoccurs positively on the first edge and
the rest of vertices ofS occur positively in the subsequent suffix. ThusS ⊆ V C(P)
and henceP ∈PT ,S.
It is straightforward to observe that ifvf /∈Sthen the third statement holds simply owing to the fact the the occurrences of the vertices ofSare not contributed by the first edges of paths ofPT. However, ifvf is a neighbour ofvn∈S, it can be noticed that
PTrch(rt),S=PTrch(rt)S\{vn}thus confirming the second statement. Indeed, sinceS⊆
V C(P)impliesS\ {vn} ∈V C(P)for anyP ∈PT,PTrch(rt),S⊆PTrch(rt),S\{vn}.
For the opposite direction, recall thatTrch(rt)=TG/vf,SV0 andvn∈F(G/vf). This
means that vn ∈ V C(P)for any path P ∈ PTrch(rt). Consequently, S\ {vn} ⊆
V C(P)implies thatS⊆V C(P)and hencePTrch(rt),S\{vn}⊆PTrch(rt),S.
Let as assign weights to the edges ofTG,SV as follows. For a binary node assign
weight0.5to both its outgoing edges. For a unary node assign weight1to its only out-going edge. Denote the weight of an edgeebyw(e). For a pathP, the weightw(P)of P is a product of weights of its edges, considering the weight of a single vertex path to be1, and for a setPof paths, its weightw(P) =P
P∈Pw(P).
Observation 3 Letabe a node ofTG,SV. Then the following statements hold.
– w(PTa) = 1.
– Let(a, b)be an edge ofTG,SV and letPbe a set of paths ofTG,SV all starting
fromb. Thenw((a, b) +P) =w((a, b))∗w(P). Forv ∈ V(G), denote1−2−(dG(v)+1) byp
G(v). The following are simple facts
regardingpG(v).
Observation 4 The following statements hold regardingpG(v).
– Letu∈V(G)\ {v}. ThenpG\u(v)≤pG(v).
– 0.5≤pG(v).
The following is the central statement towards the proof of Theorem 4.
Lemma 3. LetS be a DIS ofGsuch that S∩F(G) = ∅, let SV be an arbitrary permutation ofV(G)and letT =TG,SV. Thenw(PT ,S)≤Qv∈SpG(v). (We assume
the right-hand part of the inequality to equal1ifS=∅).
Proof.By induction on |V(G)|. If |S| = 0 then the theorem clearly holds be-causew(PT ,S)≤w(PT) = 1by Observation 3. So, assume that|S| >0and hence
|V(G)|>0. Letrtbe the root ofTand letvfbe the first vertex ofSV.
Supposertis a unary node (this means that vf ∈ F(G) and hence vf /∈ S). It follows from Lemma 2 and Observation 4 that w(PT ,S) = w(PTlch(rt),S). Recall
that Tlch(rt) = TG\vf,SV\vf and thatS is disjoint withF(G\vf). Hence, the
in-duction assumption stands. Combining it with the first item of Observation 4, we get w(PTlch(rt),S)≤
Q
v∈SpG\vf(v)≤Qv∈SpG(v)as required.
In the rest of the proof we assume thatrtis a binary node. Assume first thatvf /∈
S∪N(S). ThenSremains non-fixed in bothG\vf andG/vf and hence the induc-tion assumpinduc-tion stands for bothw(PTlch(rt),S)andw(PTrch(rt),S). Applying the same
line of argumentation as in the previous paragraph, we observe thatw(PTlch(rt),S)≤ Q
v∈SpG(v)andw(PTrch(rt),S) ≤ Q
v∈SpG(v). By Lemma 2 together with
Obser-vation 3, we obtain w(PT ,S) ≤ 0.5 ∗w(PTlch(rt),S) + 0.5 ∗w(PTrch(rt),S).
Sub-stitutingw(PTlch(rt),S)andw(PTrch(rt),S)with Q
v∈SpG(v), we obtainw(PT ,S) ≤
0.5∗Q
v∈SpG(v) + 0.5∗Qv∈SpG(v) =Qv∈SpG(v)as required.
Assume now thatvf ∈ S. Observe thatS\ {vf} is not fixed inG\vf. Hence, arguing as is the previous two paragraphs, we conclude that w(PTlch(rt),S\{vf}) ≤ Q
v∈S\{vf}pG(v). Lemma 2 together with Observation 3 yield w(PT ,S) ≤ 0.5∗
w(PTlch(rt),S). Substitutingw(PTlch(rt),S\{vf}), we obtain
w(PT ,S)≤0.5∗Qv∈S\{vf}pG(v). By the second item of Observation 4,0.5can be
re-placed bypG(vf)in the last inequality. That isw(PT ,S)≤pG(vf)∗Qv∈S\{vf}pG(v) =
Q
v∈SpG(v)as required.
Finally, suppose thatvf is a neighbour ofS. That isvf is a neighbour of exactly one vertexvn ∈ S. Observe thatS is not fixed inG\vf andS\ {vn}is not fixed inG/vf. Hence, arguing as above, we conclude thatw(PTlch(rt),S) ≤ pG\vf(vn)∗ Q
v∈S\{vn}pG(v)and thatw(PTrch(rt),S\{vn}) ≤ Q
v∈S\{vn}pG(v)(notice that we
have not replacedpG\vf(vn) bypG(vn) as retaining the former is essential for the
forthcoming reasoning). By Lemma 2 and Observation 3,w(PT ,S)≤0.5∗w(PTlch(rt),S)+
0.5w(PTrch(rt),S\{vn}). Substitutingw(PTlch(rt),S)andw(PTrch(rt),S\{vn})and
mov-ingQ
v∈S\{vn}pG(v)outside the brackets, we obtainw(PT ,S)≤0.5(pG\vf(vn)+1)∗
Q
v∈S\{vn}pG(v). The last step of our reasoning is the observation that0.5(pG\vf(vn)+
1) =pG(vn). Indeed,pG(vn) = (1−2−(dG(vn)+1)) = 0.5(2−2−dG(v)) = 0.5(1−
2−(dG\vf(vn)+1)+1) = 0.5(p
G\vf(vn)+1). Thusw(PT ,S)≤pG(vn)∗Qv∈S\{vn}pG(v) =
Q
v∈SpG(v)as required.
For the given integerx >0, letaxbe the constant such that2−1/ax= (1−2−(x+1)).
Letcbe the max-degree ofH. Then, by the last statement of Observation 4, for any v∈V(H),pH(v)≤2−1/ac.
LetSbe aDISofH. Then, combining the previous paragraph with Lemma 3, we observe thatw(PT ,S)≤2−|S|/ac.
LetS∗be an arbitrary subset ofV(H). Observe that there is aDISS ⊆S∗of size at least|S∗|/(c2+ 1). Indeed, letS ⊆S∗ be a largestDISwhich a subset ofS. Then each element ofS∗\Sis at distance at most2from an element ofS. For eachu∈S, there are at mostc+c(c−1) =c2elements ofH lying at distance at most2fromS. Thus|S∗\S| ≤ |S| ∗c2, that is|S∗| ≤ |S| ∗(c2+ 1)and hence|S| ≥ |S∗|/(c2+ 1). SincePT ,S∗⊆PT ,S,w(PT ,S∗)≤w(PT ,S)≤2−|S|/bc, wherebc=ac∗(c2+ 1).
LetS1, . . . , Sqbe at-cover ofVC(H). This means that for eachP ∈PT there is
Siwhose vertices occur as positive labels onP. In other words,PT =S q
i=1w(PT ,Si)
Hence1 =w(PT) ≤P q
i=1w(PT ,Si) ≤q∗2
−t/bc, where the first equality follows
from Observation 3. Consequently,q≥2t/bc as claimed.
5
Proof of Theorem 3
Denote byTra complete binary tree of height (root-leaf distance) r. LetT be a tree
andH be an arbitrary graph. ThenT(H)is a graph having disjoint copies ofHin one-to-one correspondence with the vertices ofT. For each pairt1, t2of adjacent vertices
of T, the corresponding copies are connected by making adjacent the pairs ofsame vertices of these copies. Put differently, we can considerH as a labelled graph where all vertices are associated with distinct labels. Then for each edge{t1, t2}ofT, edges
[image:11.612.135.523.453.524.2]are introduced between the vertices of the corresponding copies having the same label. An example of this construction is shown on Figure 3.
Fig. 3.Graphs from the left to the right:T3, P3, T3(P3). The dotted ovals surround the copies of
P3inT3(P3).
The following lemma is the critical component of the proof of Theorem 3.
Lemma 4. Letpbe an arbitrary integer and letH be an arbitrary connected graph of 2pvertices. Then for anyr≥ dlogpe,mw(Tr(H))≥(r+ 1− dlogpe)p/2.
Before proving Lemma 4, let us show how Theorem 3 follows from it.
considered classGconsists of allG=Tr(Pk−y+1 2
)forr≥5dlogke. It can be observed that the max-degree of the graphs ofGis5and their treewidth is at mostk.
Taking into account that starting from a sufficiently largercompared tok,r =
Ω(log(n/k))can be seen asr=Ω(logn), the lower bound of Lemma 4 can be stated asmw(G) =Ω(logn∗k).
The following lemma is an auxiliary statement for Lemma 4.
Lemma 5. LetTbe a tree consisting of at leastpvertices. LetHbe a connected graph of at least2pvertices. LetV1, V2 be a partition ofV(T(H))such that both partition
classes contain at leastp2vertices. ThenT(H)has a matching of sizepwith the ends
of each edge belong to distinct partition classes.
Proof of Lemma 4.The proof is by induction onr. The first considered value of r isdlogpe. After thatr will increment in 2. In particular, for all values ofr of the formdlogpe+ 2x, we will prove thatmw(Tr(H))≥(x+ 1)pand, moreover, for each
permutationSV ofV(Tr(H)), the required matching can be witnessed by a partition
of SV into a suffix and a prefix of size at leastp2 each. Let us verify that the lower
boundmw(Tr(H))≥(x+ 1)pimplies the lemma. Suppose thatr=dlogpe+ 2xfor
some non-negative integerx. Thenmw(G)≥(x+ 1)p= ((r− dlogpe)/2 + 1)p >
(r− dlogpe+ 1)p/2. Supposer=dlogpe+ 2x+ 1. Thenmw(G) =mw(Tr(H))≥
mw(Tr−1(H))≥(x+ 1)p= ((r− dlogpe −1)/2 + 1)p= (r− dlogpe+ 1)p/2.
Assume thatr = dlogpeand let us show the lower bound of pon the matching width.Tr contains at least2dlogpe+1−1 ≥2logp+1−1 = 2p−1 ≥pvertices. By
construction,Hcontains at least2pvertices. Consequently, for each ordering of vertices ofTrwe can specify a prefix and a suffix of size at leastp2(just choose a prefix of size
p2). LetV1be the set of vertices that got to the prefix and letV2be the set of vertices
that got to the suffix. By Lemma 5 there is a matching of size at leastpconsisting of edges betweenV1andV2confirming the lemma for the considered case.
Let us now prove the lemma forr = dlogpe+ 2xforx ≥ 1. Specify the cen-tre of Tr as the root and letT1, . . . , T4 be the subtrees of Tr rooted by the
grand-children of the root. Clearly, all ofT1, . . . , T4 are copies ofTr−2. Let SV be a
se-quence of vertices of V(Tr(H)). Let SV1, . . . , SV4 be the respective sequences of
V(T1(H)), . . . , V(T4(H))‘induced’ bySV (that is their order is as inSV). By the induction assumption, for each of them we can specify a partitionSVi
1, SV2iinto a
pre-fix and a sufpre-fix of size at leastp2each witnessing the conditions of the lemma forr−2.
Letu1, . . . , u4 be the last respective vertices ofSV11, . . . , SV14. Assume w.l.o.g. that
these vertices occur inSV in the order they are listed. LetSV0, SV00be a partition of SV into a prefix and a suffix such that the last vertex ofSV0 isu2. By the induction
assumption we know that the edges betweenSV2
1 ⊆ SV0 andSV22 ⊆ SV00 form a
matchingM of size at leastxp. In the rest of the proof, we are going to show that the edges betweenSV0 andSV00 whose ends do not belong to any ofSV2
1, SV22can be
used to form a matchingM0of sizep. The edges ofM andM0do not have joint ends, hence this will imply existence of a matching of sizexp+p= (x+ 1)p, as required.
The sets SV0 \ SV2
1 and SV00\ SV22 partition V(Tr(H))\ (SV12 ∪SV22) =
V(Tr(H))\V(T2(H)) =V([Tr\T2](H)). Clearly,Tr\T2is a tree. Furthermore, it
contains at leastpvertices. Indeed,T2(isomorphic toT
we are at the induction step andTrcontains at least4times more vertices thanT2. So,
in fact,Tr\T2 contains at least3pvertices. Furthermore, sinceu1precedes u2, the
wholeSV1
1 is inSV0. By definition,SV11is disjoint withSV12and hence it is a subset
ofSV0\SV2
1. Furthermore, by definition,|SV11| ≥p2and hence|SV0\SV12| ≥p2as
well. Symmetrically, sinceu3 ∈SV00, we conclude thatSV23 ⊆SV00\SV22and due
to this|SV00\SV2 2| ≥p2.
ThusSV0\SV2
1 andSV00\SV22partitionV([Tr\T2](H))into classes of size at
leastp2each and the size ofT
r\T2is at least3p. Thus, according to Lemma 5, there is
a matchingM0of size at leastpcreated by edges betweenSV0\SV12andSV00\SV22, confirming the lemma, as specified above.
Acknowledgements
I would like to thank anonymous reviewers for very useful and insightful comments. The research has been partly supported by the EPSRC grant EP/L020408/1.
References
1. Allan Borodin, Alexander A. Razborov, and Roman Smolensky. On lower bounds for read-k-times branching programs.Computational Complexity, 3:1–18, 1993.
2. Randal E. Bryant. Symbolic boolean manipulation with ordered binary-decision diagrams. ACM Comput. Surv., 24(3):293–318, 1992.
3. Andrea Ferrara, Guoqiang Pan, and Moshe Y. Vardi. Treewidth in verification: Local vs. global. InLPAR, pages 489–503, 2005.
4. Stasys Jukna.Boolean Function Complexity: Advances and Frontiers. Springer-Verlag, 2012. 5. Alexander A. Razborov. Lower bounds for deterministic and nondeterministic branching
pro-grams. InFCT, pages 47–60, 1991.
6. Alexander A. Razborov, Avi Wigderson, and Andrew Chi-Chih Yao. Read-once branching programs, rectangular proofs of the pigeonhole principle and the transversal calculus. In STOC, pages 739–748, 1997.
7. Igor Razgon. No small nondeterministic read-once branching programs for CNFs of bounded treewidth.CoRR, abs/1407.0491, 2014.
8. Igor Razgon. On OBDDs for CNFs of bounded treewidth. InKR, pages 92–100, 2014. 9. Martin Vatshelle. New width parameters of graphs. PhD thesis, Department of Informatics,