2019 International Conference on Information Technology, Electrical and Electronic Engineering (ITEEE 2019) ISBN: 978-1-60595-606-0
A Link Stability Based Adaptive Clustering Routing Algorithm for
HAP-Based Vehicle Ad Hoc Networks
Meng-ge CAI
1,2,3,*, Kai LIU
1,2,3, Meng-yuan MA
1,2,3,
Tao ZHANG
1,2,3and Feng LIU
1,2,31
School of Electronics and Information Engineering, Beihang University
2Beijing Key Lab for Network-Based Cooperative Air Traffic Management
3
Beijing Laboratory for General Aviation Technology, Beijing, China
*Corresponding author
Keywords: HAP-based VANET, AD hoc networks, Clustering, Routing protocol.
Abstract. In order to build a railway operation system capable of large-scale monitoring and comprehensive decision-making support, the HAP-based VANET is proposed. The traditional networking and routing mechanism can't be applied directly to the integrated network. This paper proposed a link stability based adaptive clustering routing algorithm (LSACR), which performs well in case of end-to-end delay and packet loss rate when the speed of nodes goes up.
Introduction
With the development of science and technology, China's railway construction has entered a critical period. Since the launch of the “One Belt, One Road” strategy, the remote areas of the western region and the heavy-duty railway have also become key areas for railway transportation, which puts new and higher requirements on the comprehensive operation of railway operation and safety. However, the current technical means are single-function and regionally independent, and do not constitute a comprehensive and fully functional monitoring system, resulting in a large lack of comprehensive monitoring, global situation sharing, and comprehensive decision-making support capabilities. It is imperative to propose a comprehensive, operational and safety support capability for large-scale, full coverage and holographic railways through breakthroughs in new technologies.
The HAP-based Network is expected to solve the current problem of weak land-based communication infrastructure by introducing adjacent space airships (aerostat) and low-altitude UAVs in the traditional railway system to build a three-dimensional network structure. In this network system, the aerostat can stay in the air for a long time, and has the characteristics of wide signal coverage, while the drone and train nodes move at high speed, which makes the network topology change frequently and frequently. Since rail transit has many different services, in order to meet the reliable transmission of network services, it is necessary to study the networking technology and emergency reconstruction scheme of the integrated network.
This paper combines the characteristics of the multi-hop, wireless and other characteristics of the HAP-based network, regarding it as a special ad hoc network. An adaptive clustering routing algorithm (LSACR) based on link stability is designed for network characteristics such as long-term aggregation of aerostats, large coverage, and high-speed movement of drones and trains.
HAP-based Network Model
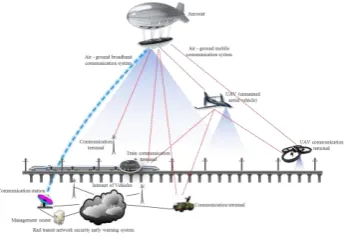
As shown in Fig. 1, the scene of the HAP-based network can be described as follows:
Figure 1. HAP-based network scene.
UAV nodes fly at low altitudes and are responsible for more granular monitoring and communication. UAVs within communication range can communicate with each other and with ground nodes within the UAV communication range. Ground nodes (such as train nodes, or other ground terminal nodes) can communicate with other ground nodes within the communication radius, as well as with a float or drone.
LSACR Algorithm
Clustering Structure Basics
For the HAP-based Network, the LCCT-CA clustering algorithm is proposed to form a clustering network with aerostat as the core, which serves as the network foundation of the routing algorithm.
The aerostat has a wide coverage, can communicate with the nodes in the coverage, has a large degree of connectivity, and is basically in a static state due to its long-term residence in the air, and the connection relationship with other nodes does not substantially occur changes, which makes a large connection time, so it competes cluster head by default. The UAV nodes and ground nodes within the coverage of the aerostat will become members of their cluster.
If the UAV node can communicate with two cluster heads at the same time, or communicate with the UAV node in another cluster, which means that the UAV node is at the junction or overlap of two (or more) clusters, and can declare itself to be a gateway. The UAV node needs to send the gateway request GatewayReq information to the cluster head. The message contains the neighbor node information of the UAV node. After cluster head receives the signal, it replies GatewayAck information, and agrees to the gateway application of the UAV node, meanwhile the gateway information is broadcast to all other cluster members.
Routing Discovery
The LSACR routing algorithm is designed based on the clustering structure. To reduce the routing cost of the network, different routing strategies can be adopted according to the location relationship between the source node and the destination node.
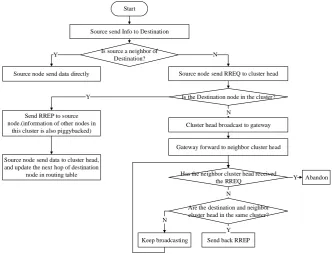
Fig. 2 shows the complete route discovery process. When the source node generates data and sends a message to the destination node, if the routing table maintained by the source node does not reach the destination node entry, that is, the source node does not know the path to the destination node, it enters the route discovery process. As shown in Fig. 2:
When the source node S wants to send a data packet to the destination node D, it first determines whether the destination node is its own neighbor node:
If the destination node is its own neighbor node, the source node directly sends the data packet to the destination node; If the destination node is not its own neighbor node, the source node sends RREQ routing request information to the cluster head.
After receiving the RREQ message, the cluster head first determines whether the destination node is in the cluster structure of the cluster head:
piggybacked. The source node records in the routing table maintained by itself that the destination node is in the same cluster as itself. The next time the data packet is sent to the destination node, the data packet can be directly sent to the cluster head and forwarded to the destination node by the cluster head;
Start
Source send Info to Destination
Is source a neighbor of Destination?
Source node send data directly Source node send RREQ to cluster head
Is the Destination node in the cluster?
Send RREP to source node.(information of other nodes in
this cluster is also piggybacked) Cluster head broadcast to gateway
Gateway forward to neighbor cluster head
Are the destination and neighbor cluster head in the same cluster?
Send back RREP Keep broadcasting
Has the neighbor cluster head received the RREQ
Source node send data to cluster head, and update the next hop of destination
node in routing table
Y N
Y
N
N
Y
Abandon
N
[image:3.595.137.471.127.381.2]Y
Figure 2. Complete Routing Discovery process.
If the destination node and the cluster head are not in the same cluster, the cluster head will broadcast the RREQ message to all gateways, and the gateway sends it to their neighboring gateway nodes (if The gateway directly connects to the cluster head of the adjacent cluster, then the gateway sends it to the adjacent cluster head node.) The neighboring gateway node sends the request message to the corresponding cluster head.
The RREQ message performs the reverse poisoning rule. After receiving the RREQ message, the cluster head does not forward the RREQ message to the neighboring cluster when forwarding the RREQ message to the neighboring cluster. At the same time, the RREQ message carries the path sequence information and is updated at each relay node. If a node finds its own node identifier in the received RREQ, it will discard this information, thus preventing the routing loop from occurring road. When the RREQ message reaches the cluster head of the cluster where the destination node is located, the cluster head determines that the destination node is in its own cluster, and then reversely returns the RREP message along the path transmitted by the RREQ. After receiving the RREP response, the cluster head on the reverse path records the corresponding routing information in the routing table maintained by itself, selects the local shortest path radial source node direction to transmit RREP according to the current link state, and records the node information; when the RREP message reaches the cluster head where the source node is located, the cluster head records the routing information of the destination node in the routing table maintained by itself, and informs the source node of the RREP return information, and finally obtains the shortest path from the source node to the destination node.
A special case of the routing algorithm is that the source node and the destination node are two adjacent clustered gateway nodes:
Routing Maintenance
Link Stability Parameters. In the HAP-based VANET, UAV nodes and train nodes move at high speed, and the network topology changes rapidly. In this process, the link may be broken, resulting in packet loss. In order to ensure the validity and real-time performance of the routing protocol, the LSACR routing protocol proposed designs a normalized link stability parameter based on two
parameters: link connection time and end-to-end delay. The normalized factor i j, which is used to
measure the stability of the link of node i and node j is calculated as follows:
, ,
, 1 (1 ) , (0 1)
i j i j
LCT E i j c end T T T T
(1)
where i j,
LCT
T is the link connection time for node i and node j. i j,
E
T demote end-to-end delay of node i and
node j, which can be computed by subtracting the Timestamp of sending and receiving on data chain.
c
T id the connect the time threshold, when TLCTi j, Tc, take
,
i j
LCT c
T T, this can avoid the inability to calculate
link stability due to the infinite connection time due to similar motion trends. Tendis the end-to-end
connection time limit, when the link end-to-end communication delay is greater than this value, the service transmission effect is poor, which can be regarded as the link cannot provide services. When
, i j E end
T T , take TEi j, Tend. Because the larger the
,
i j E end
T
T is, the worse the link stability is, whose trend is
different from , i j LCT c T
T . Therefore, the difference between 1 is used to ensure the common trend of the two
factors. In Equation (1), the factor can reach the optimum by tuning .
Since the links in the network are symmetric, that is i j, j i,, for any link in the network, the link
stability parameter values observed by node i and node j forming the link at the same time are equal.
The node i can obtain the stability parameter of the link by periodically transmitting the link stability
probe packet. The stability probe packet is only a short frame and contains information such as node position, speed, and transmission time stamp.
when node j receives the probe packet sent from the opposite side of the link, it can calculate the
link stability parameter j i, based on the received information. Then, the node j encapsulates
information such as the j i,, position and speed of the node j into the probe packet and sends it to the
node i opposite to the link. Therefore, the nodes at both ends of the link can obtain the stability
parameters of the link.
Adaptive Routing Maintenance. The high-speed motion of the nodes in the HAP-based network may cause some links to be broken. To ensure the reliability of the link transmission, set the link
stability threshold threshold . When the link stability parameter j i, is lower than the threshold
threshold
, the link is considered to have Broken risks or links do not guarantee a high quality of service. Since the cluster is directly transmitted through the neighbor node or the cluster head node is relayed, and the aerostat as the cluster head node has better service capability in terms of bandwidth and stability, the main concern is the stability of the gateway link between the clustered structures. When the link stability between the clusters is lower than the threshold, the route repair strategy is initiated
to find the alternate link. In this way, when the link between node i and node j is broken, the backup
link is quickly enabled to avoid the delay and packet loss caused by the link being broken.
Simulation and Results
Simulation Platform and Protocol Stack
information network. The platform is a discrete-time event simulation platform, which is driven by events, and the events have time, message and action attributes in the platform. In a single-layer network protocol, it has a uniform format and good simulation results. According to the characteristics and requirements of HAP-based Network, we can flexibly customize the network and access protocols of network nodes on the SNS simulation platform.
Simulation Scenario
[image:5.595.69.524.213.326.2]The simulation parameters are set as shown in the following Table 1:
Table 1. Simulation parameters.
Simulation parameters Value Simulation parameters Value
Height of aerostat 20km Area 170km*170km
Height of UAV 1km Number of aerostat 4
Cover range of aerostat 100km Number of UAV 16
Cover range of UAV 40km Packet amount 160000
Communication range of UAV 30km Packet frequency 160/s
The simulation scenario is made up of four circular areas with a diameter of 100km. Each circular area simulates the coverage of an aerostat, and the distance between the two centers is set to 70 km.
Simulation Results
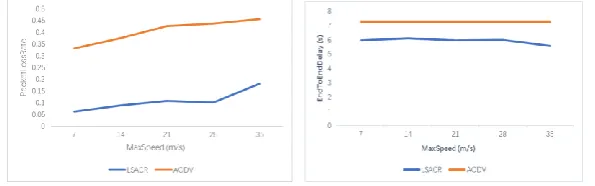
Fig. 3 shows the simulation results. With the increase of uav node movement speed, packet loss rate of both protocols increases. In comparison, the packet loss rate of LSACR is lower than that of AODV. When the speed rises to 21~28m/s, the difference between the two is about 30%. As network dynamics increases, routing maintenance overhead increases, but LSACR does not have to maintain every node and focuses on cluster heads and gateway nodes, as well as inter-cluster links. However, intra-cluster communication can be achieved quickly by acquiring intra-cluster nodes recorded at the head of the cluster. The efficiency of routing establishment is also relatively high, and the link stability is relatively high, so the packet loss rate is relatively low. As for end-to-end delay, both algorithms do not change significantly. This may be caused by the relatively large coverage range of the floating device node and the small influence of the velocity change of the UAV node.
Simulation results show that LSACR algorithm has lower end-to-end delay and packet loss rate than AODV algorithm. When the node moves at a speed of 21~28m/s (75~100km/h), it still performs well. In the actual scene of the integration network of sky-to-ground vehicle, the movement speed of the low-altitude uav is about 70-100km /h. It shows that the algorithm has some engineering reference value.
[image:5.595.150.448.601.694.2]
Figure 3. Simulation result.
Summary
In the link Stability-based adaptive clustering routing algorithm (LSACR), at the route discovery phase, the source node and the destination node adopt different routing strategies. When the destination node is a neighbor, it is directly sent. Otherwise, the RREQ message is sent to the cluster head. The pathfinding strategy is different according to whether the destination node and the source node are in the same cluster. Only the on-demand routing is used between the clusters, which reduces the transmission of control messages. At the same time, the link stability parameters are introduced and periodically monitored. The inter-cluster link state initiates alternate route homing to the link below the link stability threshold, which can reduce packet loss caused by link interruption and increase delay caused by excessive link delay. The simulation results show that the clustered routing protocol designed in this paper has better performance in terms of end-to-end average delay and packet loss rate compared with the comparison protocol.
Acknowledgement
This work was supported in part by the National Key R&D Program of China under grant No. 2016YFB1200100 and the National Science Foundation for Innovative Research Groups of China under Grant No. 61521091.
References
[1]X. Li, J. Yan, LEPR: Link Stability Estimation-based Preemptive Routing Protocol for Flying Ad
Hoc Networks, ISCC, 2017.
[2]T. Nikolovski, R. W. Pazzi, A. T. Akabane, L. A. Villas, Efficient Encounter-based Event
Dissemination Protocol (E-BED) for Urban and Highway Vehicular Ad Hoc Networks, ISCC, 2017
[3]R. Brendha, V. Sinthu Janita Prakash, A Survey on Routing Protocols for Vehicular Ad Hoc
Networks [C], 2017 International Conference on Advanced Computing Communication Systems, ICACCS, 2017.
[4]R. Shirani, M. St-Hilaire, T. Kunz, Y. Zhou, J. Li, L. Lamont, Combined Reactive-Geographic
Routing for Unmanned Aeronautical Ad-hoc Networks [C], WCMC, 2012:820-826.
[5]Jean-Daniel Medjo Me Biomo, Thomas Kunz, Marc St-Hilaire, Routing in Unmanned Aerial Ad
hoc Networks: A Recovery Strategy for Greedy Geographic Forwarding Failure [C], IEEE WCNC’14 Track 3, 2014: 2236-2241.
[6]Hamza Toulni and Benayad Nsiri, “A Hybrid Routing Protocol for VANET Using Ontology”,
Published by Elsevier Procedia Computer Science,Vol. 73,pp. 94–101,2015.
[7]D. Amagata, T. Hara, Y. Sasaki, S. Nishio, Efficient cluster-based top-k query routing with data
replication in MANETs [J], Soft Comput(2017) 21:4161-4178.
[8]F. Abbas, P. Fan, Clustering-based reliable low-latency routing scheme using ACO method for
vehicular networks [J], Vehicular Communications 12 (2018) 66-74.
[9]L. Cotta, P. O.S. Vaz de Melo, A. A.F. Loureiro, Understanding the Role of Mobility in Real
Mobile Ad Hoc Networks Connectivity, ISCC, 2017.
[10]H. Ghafoor, I. Koo, Software-Defined Networking-based Cognitive Routing Protocol for
Vehicular Ad Hoc Networks [C], 2017 International Conference on Circuits, System and Simulation, 2017: 162-166.
[11]Anurag R, Li Chi ping, Georgios A. Eytan Modiano Loop-Free Backpressure Routing Using