2016 International Conference on Computer, Mechatronics and Electronic Engineering (CMEE 2016) ISBN: 978-1-60595-406-6
Research on Robot Navigation Based on Multi-data
Fusion using Bayesian Model
Hai-jun WANG
*and Xiao-yong SONG
Shanghai Dianji University, No.1350 Ganlan Road, Lingang new city, Shanghai new district, Shanghai, China
*Corresponding author
Keywords: Bayesian theory, Navigation and localization, Multi-sensor data fusion.
Abstract. Navigation and localization is one of the key technologies to mobile robots, as human beings, mobile robot need sensors to detect the surrounding environment and plan its path to implement various tasks. Single sensor has limitation and insufficiency, so it is effective to use multiple sensors data to get the reliable navigating. This paper proposed a method of multiple sensors data fusion based on Bayesian theory, the experimental results demonstrates the effectiveness and validity of the method.
Introduction
Nowadays intelligent mobile robot plays an important role in people's daily life, robot navigation is a key technology in robotics; robot need to understand the surrounding environment and make a decision for self-navigation. With the sensors information, robot can establish the corresponding path planning algorithm [1], only when the mobile robot knows its position and the obstacles in the environment it can effectively finish the task. Robot autonomous navigation is a complex problem, especially in an unstructured environment, because it must estimate the posture probability of robot pose and environmental map consistently and efficiently. Surroundings recognition has mostly been studied in the mobile robotics community, where the problem is known as “topological localization.” Multi sensor information fusion technology is one of the key technologies of mobile robot, Information fusion is the integration of environmental information provided by multiple sensors, which can accurately reflect the environmental features, so as to make the correct decision-making, the method of multi-sensor data fusion includes the weighted average method, Kalman filtering, Bayesian estimation, D-S evidence reasoning theory, fuzzy logic, artificial neural network, etc.
Much of the research has concentrated on vision and range sensor, image sequence sets in robotics have a natural continuity and ordering that allow the use of baseline algorithms between the consecutive frames. It is very important for a robot to recognize a land mark with its visual sensors. By matching the images of different land marks based on visual data, the robot can find where it is located and which direction to move in the next step. A common approach to accurate image matching is known as ‘Key-point’ or ‘Interest point’ extraction. It involves identifying points that can be reliably extracted from different images of the same scene. Lowe [2] proposed the SIFT algorithm for object detection based on its template image. SIFT leads to local image descriptors, invariant to translation, scaling, and rotation. These descriptors are also partially invariant to illumination changes and 3-D projection. Mikolajczyk and Schmid [3] compared SIFT descriptors with other invariant feature descriptors. They concluded that SIFT performs the best under changes in scale, rotation, and illumination.
This paper organized as follows, Section II gives a brief introduction on SIFT features algorithm, analyzes the original sift feature vectors and propose to reduce its dimensionality, in section III, we introduce the laser rangefinder data processing algorithm, in section IV introduce the Bayesian theory for data fusion, the experiment results are given in section V. Finally, we conclude and discuss some future work in section VI.
Visual information processing
Key points are identified as local maxima or minima of the DoG images across scales. Each pixel in the DoG images is compared to its 26 neighbors in 3x3 regions at the current and adjacent scales. If the pixel is a local maximum or minimum, it is selected as a candidate key point. Then we remove low contrast points and edge responses, and finally get some key points.
Scale-space extrema detection as follows.
2 2 2
( ) / 2 2
1 ( , , )
2
x y
G x y e
(1)
( , , ) ( , , ) ( , )
L x y
G x y
I x y (2)( , , ) ( ( , , ) ( , , )) ( , )
( , , ) ( , , )
D x y G x y k G x y I x y
L x y k L x y
[image:2.595.199.397.383.511.2] (3)
Figure 1. Comparison with the reduced key points.
Due to the 128-dimensionality SIFT vectors, the main disadvantage of SIFT features compared to other image descriptors is the high computational cost. Reducing the high vector dimensionality will save the computational time and computer resources. The SIFT feature extraction process also generates a large volume of information which is redundant in most image retrieval applications. In robot SLAM environments up to 80 percent of the common key points generated are not matched between images which share a common view. It is therefore desirable to reduce the quantity of key points generated without affecting the number of matching key points.
Laser Ranging Data Processing Algorithm
The laser range finder has the characteristics of high measurement speed and accuracy, which is not sensitive to the noise and light brightness, due to its strong stability, high precision and robustness advantages in robot localization and environment map building, laser rangefinder is widely used in mobile robot application.
In our laboratory, the wheel mobile robot was equipped with a laser sensor, which measurements is about 30 meters, it can get 180 range data in half circle by each scan, interval angle between data is 1 degrees. Set N is the data number obtained by laser sensor.
Each subset of points represents a line segment, after data processing we can get an outline of some objects distributed in the environment. The robot can get the deep information which can be used in mapping or avoiding obstacles.
Bayesian Theory
Bayesian network classifier is one of the most popular classification techniques for large dataset. It is a statistical classifier based on the Bayesian Theorem and the maximum posteriori hypothesis. It can be used in many areas such as weather forecasting, intrusion detection, image and pattern recognition, medical diagnosis, loan approval and bioinformatics [4-6].
) ( ) ( ) ( A P AB P A B P (4) . , , 2 , 1 , ) ( ) | ( ) ( ) | ( ) | ( ), , , 2 , 1 ( 0 ) ( 1 n i A P A B P A P A B P B A P n i A P n j j j i i i i
(5) Define, set is sample space of test E, and B is the event of E, A1, A2….An is a partition of sample space, and P (B) > 0,
All the events A1, A2….An is independent.
Bayesian estimation provides a means for data fusion, which is a common method for multi sensor high level information fusion in a static environment. The sensor information is combined with the principle of probability, the measurement uncertainty is expressed in terms of conditional probability. When the observation coordinate of the sensor group is consistent, the data of the sensor can be fused directly, however, in most cases, the sensor measurement data should be used in an indirect way using Bayesian estimation for data fusion. A joint posterior probability distribution function is synthesized by the association probability distribution of each individual object, by using the likelihood function of the joint distribution function as the minimum, the final fusion value of multi sensor information is provided, a priori model of fusion information and environment provides a feature description of the whole environment. Using Bayes statistical theory for data fusion makes full use of the prior information of the measured object. The correction of the prior probability to the posterior probability is based on the measurement results.
Bayes reasoning method can be used to fuse multi-sensor information to calculate the true posterior probability of a given hypothesis. With N sensors, which are heterogeneous sensors, and they work together to detect the same target. Assume the target has M attributes need to be identified, that is, there are m assumptions Ai, i=1, 2... M. The framework of multi-data fusion use Bayesian model is shown as Fig. 2.
Experiments
The algorithm was tested on the experimental platform, which is a wheel mobile robot equipped with multiple sensors, such as the camera of Kinect, the laser ranger of urg-04lx, infrared distance sensor odometer sensor, etc.
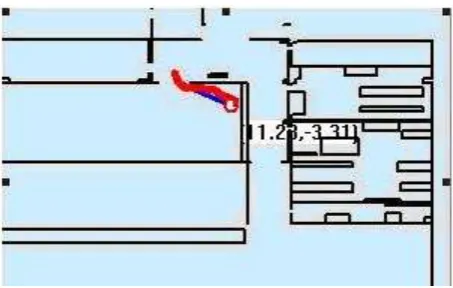
Experiments are carried out in indoor environment with known map, the results were shown as the follows, and the blue path in the following graph is the planed path, the red path is the actual path based on the proposed method in this paper. Other colors path is the navigation path based on single sensor information.
Summary
It is very important to acquire the information of multiple sensors for mobile robots worked in unknown environments, such as visual and ranger sensors, how to analyze and use the information of the multi-sensors is the key point in the research fields of robot autonomous navigation and positioning.
[image:4.595.88.502.227.356.2]In this paper, a multi-sensor data fusion algorithm based on Bayesian model was proposed, which can overcome the lack of using single sensor information, the method enhanced the ability of the mobile robot to recognize the environment, and improved the accuracy of navigation and localization of the robot with much more reliable information. The experimental result shows that the effectiveness and validity of the proposed algorithm.
[image:4.595.183.411.386.520.2]Figure 2. Multi-sensor data fusion based Bayes.
Figure 3. The blue path is the preplanned path.
Figure 4. Robot navigation based on proposed method.
Decision outcome
Sensor 1
Sensor 2
Sensor n
)
/
(
B
1A
jP
)
/
(
B
2A
jP
)
/
(
B
nA
jP
Bayes formula
M
j
B
B
B
A
P
j n,
,
1
)
/
(
1 2
Decision
Logic
1
B
2
B
n
[image:4.595.184.411.552.696.2]Figure 5. Robot navigation based on single sensor data.
Acknowledgements
This research was supported by Academic Discipline Project of Shanghai Dianji University, Project Number: 16ysxk04.
References
[1] Yongxing Qiao, Autonomous mobile robot path planning [D]. Guanxi University 2003.
[2] D. Lowe. Distinctive image features from scale-invariant key points. International Journal of Computer Vision, 2004. 60(2): 91-110.
[3] Mikolajczyk, K. and C. Schmid. A performance evaluation of local descriptors [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005. 27(10): 1615-1630.
[4] T. Hastie, R. Tibshrirani, The Elements of Statistical Learning, Springer, New York, 2001. [5] R. O. Duda et al, “Pattern Classification”, 2nd ed. Chichester, U.K.: Wiley-Interscience, 2000.
[6] D. Xhemali, J. Hinde, Christopher, G. Stone, “Naive Bayes vs. Decision Trees vs. Neural Networks in the Classification of Training Web Pages”, IJCSI International Journal of Computer Science Issues, Vol. 4, No. 1, 2009.
[7] Bin Han, TieJun Wu, “Data mining in multisensor system based on rough set theory,” Proc. American Control Conference, USA, June 2001, pp. 4427-4431.
[8] Stroupe, A.W., M.C. Martin, and T. Balch. Distributed sensor fusion for object position estimation by multi-robot systems [C]. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 01) [C]. Seoul, Korea, M ay 2001: 1092-1098.
[9] A. Davidson and D. Murray. Simultaneous localization and map building using active vision. IEEE Transactions on PAMI, 24(7):865-880, 2002.
[10] M. Montemerlo, S. Thrun, D. Koller, B. Wegbreit, FastSLAM: A factored solution to simultaneous localization and mapping, in: Proc. of the National Conference on Artificial Intelligence (AAAI), Edmonton, Canada, 2002, pp. 593-598.