2016 International Conference on Mathematical, Computational and Statistical Sciences and Engineering (MCSSE 2016) ISBN: 978-1-60595-396-0
Improved Resampling Algorithms Based
on Deterministic and Partial Resampling
Chao HE
1,*, Wei-sheng XU
2and Peng CHEN
31Department of Electrical & Information, CDHK, Tongji University, Shanghai, 200092, P.R. China 2School of Electronics and Information Engineering, Tongji University, Shanghai, 201804, P.R.
China
3
School of Mechanical Engineering, Southwest Jiaotong University, Chengdu, 610031, P.R. China *Corresponding author
Keywords: Particle filter, Resampling algorithm, Tracking.
Abstract. Particle Filter is widely used to track objects in autonomous driving. Resampling is one of the most important steps in the particle filter. In implementations, resampling is regarded as a bottleneck because of the increased complexity. To handle such kind of difficulties, an improved resampling algorithm is proposed. Firstly, the most frequently applied resampling algorithms for particle filters are introduced in this paper. A theoretical analysis is provided and the differences among these resampling algorithms are revealed. This facilitates a comparison of the algorithms about their resampling quality and computational complexity. Through the simulations, the results in the theoretical analysis are verified. It is found that optimized partial deterministic resampling is suitable for tracking in terms of a large amount of objects.
Introduction
Particle filters operate three basic processes sequentially: sampling step, importance step, and resampling step [1]. The resampling step is critical in every implementation of particle filtering, because without it the weights of most particles quickly become so small and will be given up, which leads to a bad result. The idea of resampling is to remove particles with small weights and replace them with particles with large weights [2]. The resampling step is an important and complex part in the particle filter. Therefore, a proper choice of resampling method is able to reduce the complexity or improves the quality of the filter. In the previous work, quite a few different resampling methods can be found. The most frequently applied algorithms are systematic resampling [3]. The algorithms are compared with respect to resampling quality and computational efficiency, both in theories and simulations.
In this paper, an improved resampling algorithm is proposed. In section 2 and 3, several algorithms are discussed. Section 5 is a discussion.
Basic Resampling Algorithms
As is known to all, after a few iterations of implementations, the weights of a lot of particles become small, only a few particles’ weights largely increased, thus the number of effective particles decreases immediately. On the other hand a large amount of computational calculation wastes in the estimation of probability distribution by using invalid sampling particles. In order to improve the performance of algorithms, resampling algorithms are reviewed at first. The resampling step modifies the probability density pn to pn by deleting particles having lower importance weights and multiplying particles having higher importance weights [4]. Formally:
1:
1
|
N
i i
k k k k k
i
p z
(1)
1:
1 1
1 |
N N
i i i
k k k k k k
j i
n
p z
N N
(2)
In the literatures basic resampling algorithms can be found [5], the algorithm is as follows:
for m1:N
GenerateU u
0,1 M
, s00
c
s s while su
1
c c
1
U U M
end
ic
end
N is the number of input particles. M is the number of resampled particles. is an array of weights for the importance step. The output i is an array of parameters, which shows how many times for each particle to be duplicated. It is shown that this method generates random numbers for every
particle. We found that basic resampling is implemented using two loops.
The first improving step of this method is to generate just one random number for all the particles. Then it is called the systematic resampling (SR). The SR algorithm performs the same way as the basic resampling algorithm. Instead of generating random number for every particle, SR generates only once for N particles in one literation.
Partial Resampling
The idea of partial resampling (PR) is to apply resampling algorithm only to particles with particular weights [5]. That is to say, particles with proper weights are not resampled. The advantage of this method is to apply resampling to smaller number of particles. In the previous work, there are two widely used partial resampling algorithms as following.
Partial Stratified Resampling
In partial stratified resampling (PSR), particles are grouped in three parts. The weight of particles is compared with two thresholds, higher one Th and lower one Tl. Particles with weights between these thresholds are considered proper and are not resampled. The number of particles with weights larger than Th is Nh, smaller than Tl is Nl. The sum of weights of particles that need to be resampled is
1
l
h
N j N j
hl j t N N t
S
.The PSR algorithm consists of two loops. The first one includes N iteration and classifies all the particles as proper or not. The second loop includes NlNh iterations. The algorithm is as follows:
1
,
,
j j
hl l h t h t l
j
t j
t
S N N for T or T
otherwise
(3)
l h
Partial Deterministic Resampling
In partial deterministic resampling (PDR) [5], Th and Tl are still used as mentioned above. The difference of PDR from PSR is that, the weights of particles less than Tl are removed. Each particle of
h
N will be copied for ni times. The weights of the particles and ni are calculated as follows:
2, 0 < <
1,
l h t
i
l h t h
N N i N
n
N N N i N
(4)
1
, 0 < <
,
i
t i h
i
t i
t l h
n i N
N i N N
, (5)
t l h h
N N N N (6) Partial resampling was tested to find out how well the method works, by applying it to tracking problems in different conditions. The result shows that the tracking loss decreases when Tl decreases for unchanged Th[1]. The reason for this phenomenon is inferred that particles with lower weight also carry out some information for the tracking cases.
Optimized Partial Deterministic Resampling
As is discussed in the third section, although partial resampling is really fast, particles with lower weights cannot be removed. The reason is that these particles also able to carry out some information to track the objects. In this paper, PDR is improved by adding the process to resample the lowest weights, called optimized partial deterministic resampling (OPDR). As mentioned before, the weight of particles is compared with two thresholds, higher one Th and lower one Tl. Particles with weights between these thresholds are considered as proper and are not resampled. The algorithm is as follows:
1, 0 <
2, <
2, 0 <
1, <
l h t
l h t l
i
l h u
l h u h
N N i N
N N N i N
n
N N i N
N N N i N
(7) 1
, 0 <
, <
, <
i
t i l
i i
t t l h
i
t i h
n i N
N i N N
n N N i N
(8)
WhereNu N Nl hNh,Nt N Nl hNl.
Compared with PDR, OPDR works also fast because of only resampling part of the particles. Furthermore, it utilizes the potential information of particles with lower weights. Like the part with higher weight, particles with lower weights are also divided into 2 parts. Particles with higher weights are copied once more than those with lower weights.
Optimized Systematic Resampling and Discussion
the computational waste of SR is also very high. So in this section, one loop is added to SR. Particles with weights between thresholds Th and Tl are not to be resampled. The other particles continue to be resampled as shown in the section 2. The pseudocode is as follows:
Systematic Resampling
j j
t h t
if T or T
do
(9)
For discussion, the complexity of resampling algorithms is calculated. The complexity of SR, PSR, OSR is
max
N M,
. The complexity of PDR, OPDR is
N .Table 1. Comparison of the operations for resampling algorithms.
SR PSR OSR PDR OPDR
Comparisons cN
l h
NN N c(NlNh) 2Nh 2(Nl Nh)
The numbers of particles that should be updated are equal in PSR, OSR, and OPDR. The complexities of SR and OSR are relatively higher than the other algorithms. OPDR spends a little more computational wastes to conduct the resampling than PDR, because it is more complicated to take the particles with lower weights into account.
In Figure 1, it shows that the efficiency of the resampling algorithms of the different algorithms. Considering the following 3D tracking model of objects:
1
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
t t t
T
T
T
n
(10)
Where the state p,py,p v v vz, x, y, zT contains position and velocity and nt N
0,Q
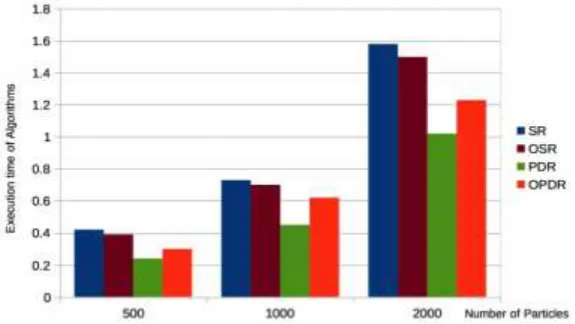
is [image:4.595.158.446.586.748.2]independent Gaussian noise sequence. The simulation is performed on a PC. Figure 1 presents the result of speed to execute different resampling algorithms. The result shows that, the algorithms based on PR are the fastest, since the smallest number of particles is resampled. Although SR and OSR perform well, their computational wastes are very high.
Figure 1. Execution time of different algorithms.
Figure 2. Tracking efficiency of different algorithms.
Conclusions
In this paper the new resampling algorithm is presented. OPDR is based on PR and PDR, and it carry out more information than PDR. Although SR and OSR perform even better than OPDR, the new algorithm are suitable for the situation, where many objects need to be tracked. It can decrease the computational waste and present a better performance than PDR. By using this algorithm, higher speed can be achieved than the classic resampling, especially in parallel implementations. It also performs better than partial stratified PSR.
Acknowledgements
This work was supported by the National Natural Science Fund "Hybrid Model of Autonomous Driving Predict and Control Research Based on the Vehicle Social Behavior" (61473209).
References
[1] M. S. Arulampalam, S. Maskell, N. Gordon, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on signal processing, 50(2): 174-188 (2002).
[2] S. Särkkä, A. Vehtari, J. Lampinen. Rao-Blackwellized particle filter for multiple target tracking[J]. Information Fusion, 8(1): 2-15 (2007).
[3] J. D. Hol. Resampling in particle filters[J] (2004).
[4] J. D. Hol, T. B. Schon, F. Gustafsson. On resampling algorithms for particle filters[C], Nonlinear Statistical Signal Processing Workshop, IEEE : 79-82 (2006).
[5] M. Bolic, P. M. Djuric, S. Hong, New resampling algorithms for particle filters[C], Acoustics, Speech, and Signal Processing, Proceedings.(ICASSP'03), IEEE International Conference on. IEEE, 2: II-589-92 vol. 2 (2003).
[6] X. Fu, Y. Jia, in: An improvement on resampling algorithm of particle filters[J], IEEE Transactions on Signal Processing, 58(10): 5414-5420 (2010).
[8] R. Douc, O. Cappé. Comparison of resampling schemes for particle filtering[C], ISPA, Proceedings of the 4th International Symposium on Image and Signal Processing and Analysis, 64-69 (2005).
[9] J. Carpenter, P. Clifford, P. Fearnhead. Improved particle filter for nonlinear problems[J], IEEE Proceedings-Radar, Sonar and Navigation, 146(1): 2-7 (1999).
[10] K. Okuma, A. Taleghani, N. De Freitas, et al. A boosted particle filter: Multitarget detection and tracking[C]//European Conference on Computer Vision. Springer Berlin Heidelberg, 28-39 (2004).