International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013)
333
EDGE Detection Techniques Using Hough Transform
Saurabh Singh
1, Dr. Ashutosh Datar
21PG Student, Department of E & C Engineering, S.A.T.I. Vidisha, INDIA (M.P.)
2Head, Department of Bio-Medical Engineering, S.A.T.I. Vidisha (M.P.)
Abstract-- Image processing is an area characterized by the need for extensive experimental wok to establish the viability of proposed solution. Interpretation of image contents is one of the objectives in computer vision specifically in image processing. In this era it has received much awareness of researchers. This paper we present different edge detection technique’s using Hough transform, because edge detection is by far the most common approach for detecting meaningful discontinuities in intensity values. Experimental results of different edge detection technique are performing using MATLAB2010a version. Effectiveness of proposed algorithm is, used for the study of medical images.
Keywords-- Edge detection, Hough transform, Discontinuity detection/Types of Discontinuity detection; Mtalab2010a.
I. INTRODUCTION
Edge detection is the name for a set of mathematical methods which aim at identifying points in a digital image at which the image brightness changes sharply or, more formally, has discontinuities. The purpose of detecting a sharp change in image brightness is to capture important events and changes in properties of the world. It can be shown that under rather general assumptions for an image formation model, discontinuities in image brightness are likely to correspond to: -discontinuities in depth, discontinuities in surface orientation, changes in material properties and variations in scene illumination [1]-[4]. Image Segmentation is the process of partitioning a digital image into multiple regions or sets of pixels [5]-[8]. In many cases an edge detector can be used as a pre- processing stage to obtain image points or image pixels that are on the desired curve in the image space. Due to imperfections in either the image data or the edge detector, however, there may be missing points or pixels on the desired curves as well as spatial deviations between the ideal line/circle/ellipse and the noisy edge points as they are obtained from the edge detector. For these reasons, it is often non-trivial to group the extracted edge features to an appropriate set of lines, circles or ellipses [9]. The purpose of the Hough transform is to address this problem by making it possible to perform groupings of edge points into object candidates by performing an explicit voting procedure over a set of parameterized image objects [10].
In the ideal case, the result of applying an edge detector to an image may lead to a set of connected curves that indicate the boundaries of objects, the boundaries of surface markings as well as curves that correspond to discontinuities in surface orientation. Thus, applying an edge detection algorithm to an image may significantly reduce the amount of data to be processed and may therefore filter out information that may be regarded as less relevant, while preserving the important structural properties of an image. If the edge detection step is successful, the subsequent task of interpreting the information contents in the original image may therefore be substantially simplified. However, it is not always possible to obtain such ideal edges from real life images of moderate complexity. The Hough transform is a feature extraction technique used in image analysis, computer vision, and digital image processing. The purpose of the technique is to find imperfect instances of objects within a certain class of shapes [11]-[12].
II. HOUGH TRANSFORM
In edge detection technique the resulting pixels seldom characterized an edge completely because of noise, breaks in the edge from non-uniform illumination and other effects that introduce spurious intensity discontinuities. Thus edge detection technique algorithms typically are followed by linking procedures to assemble edge pixels into meaningful edges. One method used for this type of problem that is Hough transforms (Hough [13]). Steps for this:
1. Peak detection-first step for line detection and linking is peak detection. for each peak, the first step is to find the location of all nonzero pixels in the image that contribute to that peak.
2. Line detection and linking-once a set of peaks has been identified in the Hough transform, it remains to be determined if there are line segment associated with those peaks, as well as they start and end.
III. EDGEDETECTION TECHNIQUES
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013)
334
The purpose of edge detection is to identify areas of an image where a large change in intensity occurs. These changes are often associated with some physical boundary in the scene from which the image is derived. Edge detector produce set of edge contains- correct edges corresponding to real - useful information e.g., object boundaries and false edges do not correspond to real edges e.g., noise. Goal of edge detection is to Produce a line drawing of a scene from an image of that scene, Important features can be extracted from the Edges of an image (e.g., corners, lines, curves). These features are used by higher-level computer vision algorithms (e.g., recognition). Edge detection is an active area of research as it facilitates higher level image analysis. There are three different types of discontinuities in the grey level like point, line and edges. Spatial masks can be used to detect all the three types of discontinuities in an image.Four steps of edge detection-
(1) Smoothing: suppress as much noise as possible, without destroying the true edges.
(2) Enhancement: apply a filter to enhance the quality of the edges in the image (sharpening).
(3) Detection: determine which edge pixels should be discarded as noise and which should be retained (usually thresholding provides the criterion used for detection).
(4) Localization: determine the exact location of an edge (sub-pixel resolution might be required for some applications, that is, estimate the location of an edge to better than the spacing between pixels). Edge thinning and linking are usually required in this step.
Below describe a short description of different edge detection technique:-
III- A. Roberts Edge Detection
It was one of the first edge detectors and was initially proposed by Lawrence Roberts in 1963. It performs a simple, quick to compute, 2-D spatial gradient measurement on an image. It thus highlights regions of high spatial frequency which often correspond to edges. The input to the operator is a grayscale image the same as to the output is the most common usage for this technique. Pixel values in every point in the output represent the estimated complete magnitude of the spatial gradient of the input image at that point.
Gx = [ ] and Gy = [ ]
III- B. Sobel Edge Detection
The Sobel operators are named after Erwin Sobel. The Sobel operator relies on central difference, but gives greater weight to the central pixels when averaging. The Sobel operator can be thought of as 3 approximations to first derivative of Gaussian kernels. Sobel operators which are shown in the masks below:
Gx = [
] and Gy = [
]
III- C. Prewitt Edge Detection
The Prewitt operators are named after Judy Prewitt. Prewitt operator based on the idea of central difference. The Prewitt operator measures two components. The vertical edge component is calculated with kernel Gx and the horizontal edge component is calculated with kernel Gy. |Gx| + |Gy| give an indication of the intensity of the gradient in the current pixel.
Gx = [
] and Gy =[
]
III- D. Kirsch Edge detection
The Kirsch operator or Kirsch compass kernel is a non-linear edge detector that finds the maximum edge strength in a few predetermined directions. It is named after the computer scientist single mask and rotating it to eight main compass directions: North, Northwest, West, Southwest, South, Southeast, East and Northeast. Kirsch operator represented by the mask:
E = [
]
NE = [
]
N = [
] NW = [
]
W = [
] SW = [
]
S = [
] SE = [
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013)
335
III- E. Kiresh Edge detectionKiresh operator represented by the mask:
W1 = [
]
W2 = [
]
W3 = [
] W4 = [ ]
III- F. Laplacian of Gaussian Edge detection (LOG)
This LOG operator smooths the image through convolution with Gaussian-shaped kernel followed by applying the laplacian operator. Laplacian of Gaussian edge detection mask is:
Gx = [
]
and Gy = [
]
III- G. Laplacian Edge detection
The Laplacian of an image f(x, y) is a second order derivative defined as:
Laplacian operator mask below:
[ ]
III- H. Canny Edge detection
The Canny edge detector is an edge detection operator that uses a multi-stage algorithm to detect a wide range of edges in images. It was developed by John F. Canny in 1986. Canny's aim was to discover the optimal edge detection algorithm. In this situation, an "optimal" edge detector means:
Good detection – the algorithm should mark as many real edges in the image as possible.
Good localization – edges marked should be as close as possible to the edge in the real image.
Minimal response – a given edge in the image should only be marked once, and where possible, image noise should not create false edges.
The method can be summarized below:
1. The image is smoothed using a Gaussian filter with a specified standard deviation , to reduce noise. 2. The local gradient and edge direction are computed at
each point using different operator.
3. Apply non-maximal or critical suppression to the gradient magnitude.
4. Apply threshold to the non-maximal suppression image.
IV. IMAGE QUALITY PARAMETERS
Image quality is a characteristic of an image that measures the perceived image degradation (typically, compared to an ideal or perfect image). Two parameters are there:
IV- A. MSE
It is defined as the squared difference between the original image and estimated image.
MSE= ∑ ̂
Where- X = original value, ̂ = stego value and N = number of samples.
IV- B. PSNR (Peak signal to noise ratio):- Peak Signal-to-Noise Ratio, often abbreviated PSNR, is an engineering term for the ratio between the maximum possible power of a signal and the power of corrupting noise that affects the fidelity of its representation[10]. Because many signals have a very wide dynamic range, PSNR is usually expressed in terms of the logarithmic decibel scale.
PSNR is most easily defined via the mean squared error (MSE):
PSNR=
Where: L = maximum value, MSE = Mean Square Error,
V. EXPERIMENTAL RESULT
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013)
336
Fig.1. Original Image
Fig.1.1. Robert
Fig.1.2 Prewitt
Fig.1.3 Log
Fig.1.4 Laplacian
Fig.1.5 Kiresh
Fig.1.6 Kirch
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013)
[image:5.612.54.286.118.556.2]337
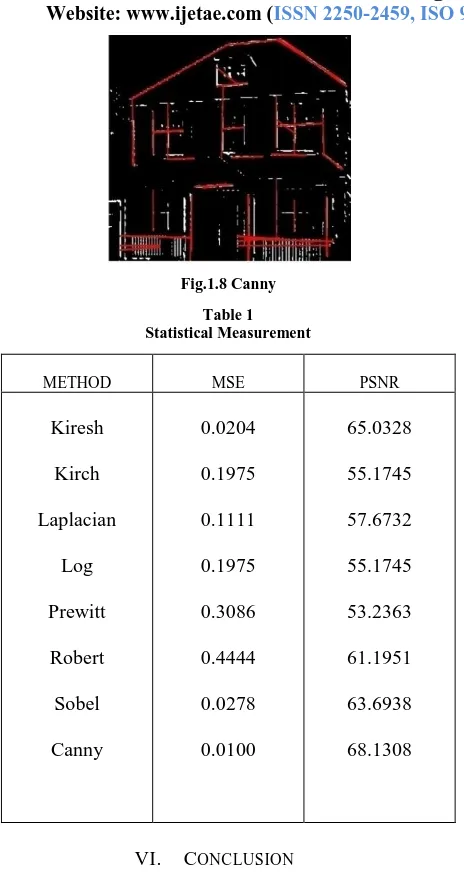
Fig.1.8 Canny
Table 1 Statistical Measurement
METHOD MSE PSNR
Kiresh
Kirch
Laplacian
Log
Prewitt
Robert
Sobel
Canny
0.0204
0.1975
0.1111
0.1975
0.3086
0.4444
0.0278
0.0100
65.0328
55.1745
57.6732
55.1745
53.2363
61.1951
63.6938
68.1308
VI. CONCLUSION
In this paper we present Hough transform based line detection using different edge detection techniques like- Robert, Sobel, Prewitt, Kirch, Laplacian of Gaussian, Laplacian and Canny. Even though so many edge detection techniques are available in the literature, since it is a challenging task to the research communities to detect the exact image without noise from the original image. Any image can have noise in them like-Heat waves, Dust, Smoke, Acquisition noise etc. canny edge detector gives better result in noisy image than other operator.
Importance of Canny edge detector have low error rate and filter out unwanted information while the useful information preserve and to keep the lower variation as possible between the original image and the processed image. In Above table clearly shows that canny methods have low MSE and higher PSNR than other. These performances are carried out using MATLAB2010a version. These techniques will be helpful for the study of medical images, Defense, Security much more.
REFERENCES
[1] D. Marr, E. Hildreth, “Theory of edge detection,” Proc. Royal Society of London, vol. 207, no. 1167, pp.187–.217, Feb.1980. [2] J. Canny, “A computational approach to edge detection,” IEEE
Transaction on Pattern Analysis and Machine Intelligence, vol 8, no 6, pp. 679-714, June 1986.
[3] D. Ziou, S. Tabbone, "Edge detection techniques: An overview,” International Journal of Pattern Recognition and Image Analysis, vol.8, no.4 pp.537–559, 1998
[4] S Lakshmi, V.Sankaranarayanan, “A Study of edge detection techniques for Segmentation computing approaches,” Computer Aided Soft Computing Techniques for Imaging and Biomedical Applications, pp. 35-41.
[5] Punam Thakare, “A Study of Image Segmentation and Edge Detection Techniques,” International Journal on Computer Science and Engineering, vol 3, no.2, pp.899-904, Nov-Dec 2011. [6] R. Muthukrishnan and M.Radha,’’ Edge Detection technique for
image segmentation,” International Journal of Computer Science & Information Technology (IJCSIT) vol 3, no 6, pp.9, Dec 2011. [7] Salem Saleh Al-amri et. al.,’’ Image segmentation by using edge
detection,” International Journal on Computer Science and Engineering (IJCSE) vol. 02, no. 03, pp.804-807, June 2010. [8] N. Senthilkumaran, R. Rajesh, "Edge Detection Techniques for
Image Segmentation and A Survey of Soft Computing Approaches,” International Journal of Recent Trends in Engineering, vol. 1, no. 2, pp.250-254, May 2009.
[9] L.S. Davis, "A survey of edge detection Techniques,” Computer Graphics and Image Processing, vol 4, no. 3, pp. 248-260, Sep 1975. [10] S Jayaraman, S Esakkirajan and T Veerakumar, “Digital Image
Processing,” Tata McGraw Hill Education ptd. Ltd, New Delhi, 7th
ed., 2012, pp.368-393.
[11] R. S. Wallace, A modified Hough transform for Line, in IEEE CVPR Conf., San Francisco, 19-23 June, 1986, pp.665-667.
[12] R. D. Duda, P. E. Hart, “Use of the Hough transform to detect lines and curves in pictures,”association of computing machinery (ACM), pp.11-15, Jan 1972.