Volume 2011, Article ID 738285,13pages doi:10.1155/2011/738285
Research Article
Stability Analysis and Intermittent
Control Synthesis of a Class
of Uncertain Nonlinear Systems
Yali Dong,
1Shengwei Mei,
2and Jinying Liu
11School of Science, Tianjin Polytechnic University, Tianjin 300160, China
2Department of Electrical Engineering, Tsinghua University, Beijing 100084, China
Correspondence should be addressed to Yali Dong,[email protected]
Received 4 November 2010; Revised 7 January 2011; Accepted 10 January 2011
Academic Editor: Andrea Laforgia
Copyrightq2011 Yali Dong et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper investigates the problem of exponential stabilization for a class of uncertain nonlinear systems by means of periodically intermittent control. Several sufficient conditions of exponential stabilization for this class of uncertain nonlinear systems are formulated in terms of a set of linear matrix inequalities by using quadratic Lyapunov function and inequality analysis technique. Also, the synthesis of stabilization periodically intermittent state feedback controllers is present such that the close-loop system is exponentially stable. A simulation example is given to illustrate the effectiveness of the proposed approach.
1. Introduction
In recent years, significant interest in the study of stability analysis and control design of nonlinear systems has aroused 1–5. In 4, the problem of the stabilization of affine nonlinear control systems via the center manifold approach was considered. In 5, a stabilizing output feedback model with a predictive control algorithm was proposed for linear systems with input constraints. Recently, incontinuous control techniques such as impulsive control6and piecewise feedback control7have attracted much attention. In
error-feedback control laws were constructed to achieve asymptotic rejecting of the unwanted disturbances and/or tracking of the desired trajectories.
Besides these control methods for nonlinear systems mentioned above, intermittent control is a special form of switching control 8. It has been used for a variety of purposes in engineering fields such as manufacturing, transportation, air-quality control, and communication. Recently, intermittent control has been introduced to chaotic dynamical systems 9–11, in which the method of synchronizing slave-to-master trajectory using intermittent coupling was proposed. However, 9 gave little theoretical analysis of intermittent control systems but only many numerical simulations. In 10, the authors investigated the exponential stabilization problem for a class of chaotic systems with delay by means of periodically intermittent control. In 11, the quasi-synchronization problem for chaotic neural networks with parameter mismatch was formulated via periodically intermittent control. In12, the problem of the robust stabilization for a class of uncertain linear systems with multiple time-varying delays was investigated. A memoryless state-feedback controller for the robust stabilization of the system was proposed. Based on the Lyapunov method and the linear matrix inequalityLMIapproach, two sufficient conditions for the stability were derived. In13, a new delay-dependent stability criterion for dynamic systems with time-varying delays and nonlinear perturbations was proposed.
Motivated by the aforementioned discussion, in this paper, we investigate the problem of exponential stabilization of a class of uncertain nonlinear systems by using periodically intermittent control, which is activated in certain nonzero time intervals, and offin other time intervals. Based on Lyapunov stability theory, some exponential stability criteria for this class of uncertain nonlinear systems are given, which have been expressed in terms of linear matrix inequalitiesLMIs. A numerical example is given to demonstrate the validity of the result.
The rest of this paper is organized as follows. In Section 2, the intermittent control problem is formulated and some notations and lemmas are introduced. In Section 3, the exponential stabilization problem for a class of uncertain nonlinear systems is investigated by means of periodically intermittent control, and some exponential stability criteria are established. Finally, some conclusions and remarks are drawn in Section4.
2. Problem Formulation and Preliminaries
Consider a class of nonlinear uncertain systems described as
˙
xt A ΔAtxt B ΔBtut fxt,
xt0 x0, 2.1
wherex ∈Rn is state vector, andu∈Rm is the external input of system2.1.f :Rn → Rn is a continuous nonlinear function withf0 0, and there exists a positive definite matrixQ such thatfx2≤xTQxforx∈Rn.ΔAtandΔBtare time-varying uncertainties, which satisfy the following conditions:
where Di,Ei,i 1,2 are real constant matrices of appropriate dimensions and Ftis an unknown time-varying matrix withFTtFt≤I.
The following lemmas are useful in the proof of our main results.
Lemma 2.1see14. LetD,E, andF be real matrices of appropriate dimensions withFTF ≤ I, then for any scalarε >0, one has the following inequality:
DFE ETFTDT ≤ε−1DDT εETE. 2.3
Lemma 2.2see15. LetM,Nbe real matrices of appropriate dimensions. Then, for any matrix
Q >0of appropriate dimension and any scalarβ >0, the following inequality holds:
MN NTMT ≤β−1MQ−1MT βNTQN. 2.4
Lemma 2.3see16. Given constant symmetric matricesS1,S2,S3, andS1ST1 <0, S3ST3 > 0, thenS1 S2S−31ST2 <0if and only if
S1 S2 ST
2 −S3
<0. 2.5
In order to stabilize the system2.1by means of periodically intermittent feedback control, we assume that the control imposed on the system is of the following form:
ut
⎧ ⎨ ⎩
Kxt, nT≤t < nT τ,
0 nT τ ≤t <n 1T,
2.6
whereK ∈ Rm×n is the control gain matrix,T > 0 denotes the control period, andτ > 0 is called the control width. Our objective is to design suitableT, τ, andKsuch that the system
2.1can be stabilized.
With control law2.6, system2.1can be rewritten as
˙
xt A ΔAtxt B ΔBtKxt fxt, nT≤t < nT τ,
˙
xt A ΔAtxt fxt, nT τ≤t <n 1T. 2.7
The above system is classical uncertain switched one where the switching rule only depends on time. Although there are many successful applications of intermittent control, the theoretical analysis on intermittent control system has received little attention. In this paper, we will make a contribution to this issue.
3. Exponential Stabilization of a Class of Uncertain Nonlinear System
This section addresses the exponential stability problem of the switched system2.7. The main result is stated as follows.
Theorem 3.1. The system2.7is exponentially stable, if there exists a positive definite matrixP >0, scalar constantsη >0, δ >0,εij >0i1,2, j1,2, ε13 >0, such that the following LMIs hold:
⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣
Ξ1 P PD1 PD2 P −ε−1
11I 0 0 DT
1P 0 −ε−121I 0 DT
2P 0 0 −ε−131
⎤ ⎥ ⎥ ⎥ ⎥ ⎥
⎦<0, 3.1
⎡ ⎢ ⎢ ⎣
ATP PA ε−1
21Q ε−221ET1E1 δI P PD1
P −ε−1
21I 0 DT
1P 0 −ε22−1I
⎤ ⎥ ⎥
⎦<0, 3.2
where
Ξ1ATP PA PBK KTBTPT ε−111Q ε12−1ET1E1 ε−131KTET2E2K ηI. 3.3
Moreover, the solutionxtsatisfies the condition
xt ≤
λmaxP
λminP x0e−ητ δT−τ/2TλmaxPt−τ, ∀t >0. 3.4
Proof. Consider the following candidate Lyupunov function
Vxt xTtPxt, 3.5
which implies that
λminPxt2≤Vxt≤λmaxPxt2. 3.6
WhennT ≤t < nT τ, the derivative of formula3.5with respect to timetalong the trajectories of the first subsystem of system2.7is calculated and estimated as follows:
˙
Vxt xTtA ΔAtTP PA ΔAtxt xTtPB ΔBtut
uTtB ΔBtTPxt 2xTtPfxt
xTtATP PA PBK KTBTPxt 2xTtPfxt
xTtET
1FTtD1TP PD1FtE1 PD2FtE2K KTET2FTtDT2P
xt.
Using Lemmas2.1and2.2, we get
˙
Vxt≤xTtATP PA PBK KTBTPxt ε11xTtPPxt ε−1
11fxt 2
xTtε−1
12ET1E1 ε12PD1D1TP ε13−1KTET2E2K ε13PD2DT2P
xt
≤xTtATP PA PBK KTBTP ε−1
12ET1E1 ε12PD1DT1P ε−131KTET2E2K
ε13PD2DT
2P ε11PP ε−111Q
xt.
3.8
From formula3.1and Lemma2.3, we have
Ξ1 ε11PP ε12PD1D1TP ε13PD2D2TP <0. 3.9
Hence, we get
˙
Vxt≤ −ηxTtxt
≤ −c1Vxt, 3.10
wherec1η/λmaxP. Thus, we have
˙
Vxt≤ −c1Vxt, nT ≤t < nT τ, 3.11
which implies that whennT ≤t < nT τ
Vxt≤VxnTe−c1t−nT. 3.12
Similarly, whennT τ≤t <n 1T, we have
˙
Vxt xTtA ΔAtTP PA ΔAtxt 2xTtPfxt
xTtATP PAxt 2xTtPfxt xTtET
1FTtDT1P PD1FtE1
xt
≤xTtATP PA ε21PP ε−1
21Q ε−221ET1E1 ε22PD1DT1P
xt.
3.13
From formula3.2and Lemma2.3, we have
ATP PA ε21PP ε−1
Hence, it is obtained that
˙
Vxt≤ −δxTtxt
≤ −c2Vxt, 3.15
wherec2δ/λmaxP.
So, we derive that whennT τ ≤t <n 1T,
˙
Vxt≤ −c2Vxt, 3.16
Vxt≤VxnT τe−c2t−nT−τ. 3.17
From inequalities3.12and3.17, we have the following. When 0≤t < τ,Vxt≤Vx0e−c1tandVxτ≤Vx0e−c1τ. Whenτ ≤t < T,
Vxt≤Vxτe−c2t−τ
≤Vx0e−c1τ c2t−τ,
VxT≤Vx0e−c1τ c2T−τ.
3.18
WhenT ≤t < T τ,
Vxt≤VxTe−c1t−T
≤Vx0e−c1τ c2T−τ c1t−T,
VxT τ≤Vx0e−2c1τ c2T−τ.
3.19
WhenT τ≤t <2T,
Vxt≤VxT τe−c2t−T−τ
≤Vx0e−2c1τ c2T−τ c2t−T−τ,
Vx2T≤Vx0e−2c1τ 2c2T−τ.
3.20
When 2T ≤t <2T τ,
Vxt≤Vx2Te−c1t−2T
≤Vx0e−2c1τ 2c2T−τ c1t−2T,
Vx2T τ≤Vx0e−3c1τ 2c2T−τ.
When 2T τ ≤t <3T,
Vxt≤Vx2T τe−c2t−2T−τ
≤Vx0e−3c1τ 2c2T−τ c2t−2T−τ,
Vx3T≤Vx0e−3c1τ 2c2T−τ c2T−τ
Vx0e−3c1τ 3c2T−τ.
3.22
WhennT ≤t < nT τ, that is,t−τ/T < n≤t/T,
Vxt≤VxnTe−c1t−nT
≤Vx0e−nc1τ nc2T−τe−c1t−nT
≤Vx0e−nc1τ nc2T−τ
≤Vx0e−c1τ c2T−τ/Tt−τ.
3.23
WhennT τ ≤t <n 1T, that is,t/T < n 1<t−τ T/T,
Vxt≤VxnT τe−c2t−nT−τ
≤Vx0e−c1τ c2T−τ/Tt−τe−c2t−nT−τ
≤Vx0e−c1τ c2T−τ/Tt−τ.
3.24
From inequalities3.23and3.24, it follows that for anyt >0,
xTtxt≤ 1
λminPVx0e−c1τ c2T−τ/Tt−τ
≤ λmaxλminPPx02e−c1τ c2T−τ/Tt−τ.
3.25
Hence, we get
xt ≤
λmaxP
λminPx0e−c1τ c2T−τ/2Tt−τ, ∀t >0, 3.26
that is,
xt ≤
λmaxP
λminPx0e−ητ δT−τ/2TλmaxPt−τ, ∀t >0, 3.27
Remark 3.2. In 17, the problem of an exponential stability for time-delay systems with interval time-varying delays and nonlinear perturbations was investigated. Based on the Lyapunov method, a new delay-dependent criterion for exponential stability is established in terms of LMI. However, in17, the control is not concerned in the systems. In our paper, as
τ → T, the periodic feedback will be reduced to the general continuous feedback. In this case, formula 3.1 gives an exponential stability criterion for the system 2.1 with continuous feedback controlut Kxt. Hence, our result have a wider area of applications.
Corollary 3.3. If there exist a symmetric and positive definite matrixP >0, scalar constantsη > 0,
δ >0,εj>0 j1,2,3, such that the following LMIs hold:
PBK KTBTP ε−1
3 KTET2E2K ηI−δI PD2 DT
2P −ε−31I
<0, 3.28
⎡ ⎢ ⎢ ⎣
ATP PA ε−1
1 Q ε−21ET1E1 δI P PD1
P −ε−1
1 I 0 DT
1P 0 −ε2−1I
⎤ ⎥ ⎥
⎦<0, 3.29
then the system2.7is exponentially stable, and moreover,
xt ≤
λmaxP
λminPx0e−ητ δT−τ/2TλmaxPt−τ, ∀t >0. 3.30
Proof. Setε11 ε21ε1,ε12 ε22ε2, andε13ε3. From3.29and Lemma2.3, we get
ATP PA ε21PP ε−1
21Q ε−221ET1E1 ε22PD1DT1P
ATP PA ε1PP ε−1
1 Q ε−21ET1E1 ε2PD1DT1P <−δI.
3.31
So, formula3.2holds. From formulae3.31,3.28, and Lemma2.3, we obtain
ATP PA PBK KTBTP ε11PP ε−1
11Q ε−121ET1E1 ε12PD1D1TP ε−1
13KTET2E2K ε13PD2DT2P ηI
ATP PA PBK KTBTP ε1PP ε−1
1 Q ε−21ET1E1 ε2PD1D1TP ε−1
3 KTET2E2K ε3PD2DT2P ηI < PBK KTBTP ε−1
3 KTET2E2K ε3PD2DT2P ηI−δI <0.
3.32
Now, we consider the following uncertain nonlinear system
˙
xt A ΔAtxt I ΔFtBut fxt,
xt0 x0, 3.33
wherex ∈ Rn,u ∈ Rn,Bis inverse.ΔAtand ΔFt are time-varying uncertainties with
ΔFTtΔFt≤Iand satisfyΔAt DΔFE, in whichDandEare real constant matrices of appropriate dimensions.f:Rn → Rn is a continuous nonlinear function satisfyingf0 0, and there exists a positive definite matrixQsuch thatfx2≤xTQxforx∈Rn.
Consider the following control law:
ut
⎧ ⎨ ⎩
kB−1xt, nT≤t < nT τ,
0, nT τ≤t <n 1T, 3.34
wherek∈R. Then, the system3.33with formula3.34can be rewritten as
˙
xt A ΔAtxt I ΔFtkxt fxt, nT ≤t < nT τ,
˙
xt A ΔAtxt fxt, nT τ≤t <n 1T. 3.35
Theorem 3.4. If there exist a symmetric and positive definite matrixP >0, scalar constantsη >0,
δ >0,εj>0 i, j1,2,ε13 >0,k, such that the following LMIs hold:
⎡ ⎢ ⎢ ⎣
ATP PA 2kP ε11Q ε−1
12ET1E1 ε−131k2I ηI P PD
P −ε13 ε−1
11
−1 I 0
DTP 0 −ε−1
12I
⎤ ⎥ ⎥
⎦<0, 3.36
⎡ ⎢ ⎢ ⎣
ATP PA ε21Q ε−1
22ETE δI P PD
P ε21I 0
DTP 0 ε−1
22
⎤ ⎥ ⎥
⎦<0, 3.37
then the system3.35is exponentially stable, and moreover,
xt ≤
λmaxP
λminPx0e−ητ δT−τ/2TλmaxPt−τ, ∀t >0. 3.38
WhennT ≤t < nT τ, the derivative of Lyupunov function3.5with respect to time
talong the trajectories of the first subsystem of system3.35is calculated and estimated as follows:
˙
Vxt A ΔAtxt I ΔFtkxt fxtTPxt
xTtPA ΔAtxt I ΔFtkxt fxt
xTtATP PA 2kPxt 2xTtPfxt
xTtETΔFTtDTP PDΔFtExt 2kxTtPΔFtxt
≤xTtATP PA 2kP ε−1
11PP ε11Q ε−121ETE ε12PDDTP ε13−1k2I ε13PP
xt.
3.39
From formula3.36and Lemma2.3, we have
˙
Vxt≤ −ηxTtxt,
≤ −c1Vxt, 3.40
wherec1η/λmaxP. Thus, we have
˙
Vxt≤ −c1Vxt, nT ≤t < nT τ, 3.41
which implies that whennT ≤t < nT τ,
Vxt≤VxnTe−c1t−nT. 3.42
Similarly, whennT τ≤t <n 1T, we have
˙
Vxt xTtATP PAxt 2xTtPfxt xTtΔAtTP PΔAtxt
≤xTtATP PA ε−1
22ETE ε22PDDTP
xt ε−1
21xTtPPxt ε21fxt 2
≤xTtATP PA ε−1
21PP ε21Q ε−221ETE ε22PDDTP
xt
≤ −c2Vxt,
3.43
So, we derive that whennT τ ≤t <n 1T,
Vxt≤ −c2Vxt,
Vxt≤VxnT τe−c2t−nT−τ. 3.44
Similar to the proof in Theorem3.1, we can get
xt ≤
λmaxP
λminPx0e−c1τ c2T−τ/2Tt−τ, ∀t >0, 3.45
that is,
xt ≤
λmaxP
λminPx0e−ητ δT−τ/2TλmaxPt−τ, ∀t >0, 3.46
which completes the proof.
Example 3.5. Consider the system2.1with
A −10 2 2 −10 , B 0 1
, fx
x2tsinx1t
x1tcosx2t
, K0.01 0.2,
E1 1 −2 2 1 , D1 2 1 −1 2 , D2 −1 1 −1 −1 , E2 3 −1 . 3.47
It is obvious thatQI.
For the positive numbers η 0.5, δ 2, ε1 ε2 ε3 1, by solving LMIs of Corollary3.3, we obtain
P
0.6474 0.0745
0.0745 0.5723
. 3.48
Therefore, the system is robustly exponentially stabilizable with feedback control
ut
⎧ ⎨ ⎩
0.01x1t 0.2x2t, nT≤t < nT τ,
0, nT τ≤t <n 1T,
3.49
and the solution of the system satisfies
0 0.2 0.4 0.6 0.8 1 −1
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
t
x1(t)
[image:12.600.194.409.96.308.2]x2(t)
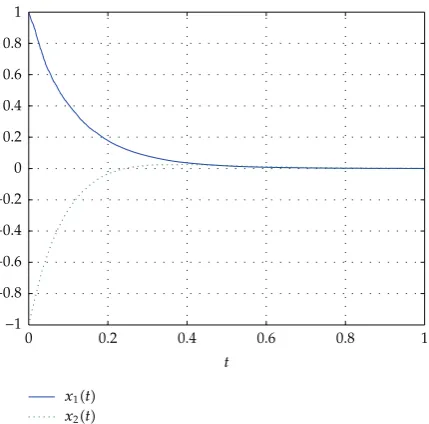
Figure 1:The statex1andx2of the closed-loop system in Example3.5.
Simulation result is shown in Figure1for the initial conditionx0 1 −1T,T 0.2,τ0.1, and Ft α00β, whereα and βare random constants between 0 and 1. It is seen from Figure1that the closed-loop system is exponentially stable.
4. Conclusions
In this paper, we deal with the exponential stabilization problem of a class of uncertain nonlinear systems by means of periodically intermittent control. Based on Lyapunov function approach, several stability criteria have been given in terms of a set of linear matrix inequalities, and stabilization periodically intermittent state feedback controllers are proposed. Finally, a numerical example is provided to show the high performance of the proposed approach.
Acknowledgment
This work is supported by the National Nature Science Foundation of China under Grant no. 50977047.
References
1 C. K. Ahn, S. Han, and W. H. Kwon, “H∞finite memory controls for linear discrete-time state-space
models,”IEEE Transactions on Circuits and Systems II, vol. 54, no. 2, pp. 97–101, 2007.
3 Y. Dong, J. Fan, and S. Mei, “Quadratic stabilization of switched nonlinear systems,”Science in China. Series F, vol. 52, no. 6, pp. 999–1006, 2009.
4 D. Cheng and Y. Guo, “Stabilization of nonlinear systems via the center manifold approach,”Systems & Control Letters, vol. 57, no. 6, pp. 511–518, 2008.
5 D. Sun, Z. Li, Y. Shi, and J. Zhang, “Output feedback model predictive control for linear systems with input constraints,” inProceedings of IEEE International Conference on Control and Automation (ICCA ’07), pp. 1857–1861, 2007.
6 J. G. Lu and D. J. Hill, “Impulsive synchronization of chaotic Lur’e systems by linear static measurement feedback: an LMI approach,”IEEE Transactions on Circuits and Systems II, vol. 54, no. 8, pp. 710–714, 2007.
7 C. Chen, Z. Ding, G. Feng, and X. Guan, “Output regulation of discrete-time nonlinear systems based on T-S fuzzy model,” inProceedings of the 27th Chinese Control Conference (CCC ’08), pp. 746–750, 2008.
8 T. L. Montgomery, J. W. Frey, and W. B. Norris, “Intermittent control systems,”Environmental Science and Technology, vol. 9, no. 6, pp. 528–533, 1975.
9 M. Zochowski, “Intermittent dynamical control,”Physica D, vol. 145, no. 3-4, pp. 181–190, 2000.
10 C. Li, X. Liao, and T. Huang, “Exponential stabilization of chaotic systems with delay by periodically intermittent control,”Chaos, vol. 17, no. 1, Article ID 013103, p. 7, 2007.
11 J. Huang, C. Li, and Q. Han, “Quasi-synchronization of chaotic neural networks with parameter mismatch by periodically intermittent control,” inProceedings of the WRI World Congress on Computer Science and Information Engineering (CSIE ’09), vol. 6, pp. 485–489, 2009.
12 J. H. Park, “Robust stabilization for dynamic systems with multiple time-varying delays and nonlinear uncertainties,”Journal of Optimization Theory and Applications, vol. 108, no. 1, pp. 155–174, 2001.
13 O. M. Kwon, J. H. Park, and S. M. Lee, “On robust stability criterion for dynamic systems with time-varying delays and nonlinear perturbations,”Applied Mathematics and Computation, vol. 203, no. 2, pp. 937–942, 2008.
14 Y. Y. Wang, L. Xie, and C. E. de Souza, “Robust control of a class of uncertain nonlinear systems,”
Systems & Control Letters, vol. 19, no. 2, pp. 139–149, 1992.
15 Y.-Y. Cao, Y.-X. Sun, and C. Cheng, “Delay-dependent robust stabilization of uncertain systems with multiple state delays,”IEEE Transactions on Automatic Control, vol. 43, no. 11, pp. 1608–1612, 1998.
16 O. M. Kwon and J. H. Park, “Exponential stability of uncertain dynamic systems including state delay,”Applied Mathematics Letters, vol. 19, no. 9, pp. 901–907, 2006.
![(4R*,4aR*,7aS*) 5 Oxo 6 phenyl 4a,5,6,7,7a,8 hexahydro 4H furo[2,3 f]isoindole 4 carboxylic acid](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)