Availableonlineatwww.sciencedirect.com
ScienceDirect
j ou rn a l h o m e p a g e :w w w . e l s e v i e r . c o m / p i s c
Diagnosis
of
airgap
eccentricity
fault
in
the
inverter
driven
induction
motor
drives
by
transformative
techniques
夽
Khadim
Moin
Siddiqui
a,∗,
Kuldeep
Sahay
a,
V.K.
Giri
b,
Narendra
Gothwal
caElectricalEngineeringDepartment,InstituteofEngineering&Technology,Lucknow,India
bElectricalEngineeringDepartment,MadanMohanMalaviyaUniversityofTechnology,Gorakhpur,India cElectricalEngineeringDepartment,JaipurNationalUniversity,Jaipur,India
Received8February2016;accepted3April2016 Availableonline 20April2016
KEYWORDS Squirrelcage inductionmotor; Pulsewidth modulation; Airgapeccentricity fault; Timedomain analysis; Time-frequency domainanalysis; Wavelettransform; Approximationsignal
Summary Inthepresentpaper,theairgapeccentricityfaultoftheinductionmotorhasbeen diagnosedbydigitalsignalprocessingtransformativetechniquesintheinverterdriveninduction motordrives.Theairgapeccentricityfaulthasbeendiagnosedinthetransientconditionby timedomainaswellastime-frequencydomaintechniqueswiththehelpofaproposeddynamic simulationmodel.In thepast,many signalprocessing techniqueshadbeenusedfor various inductionmotorfaultdetectionpurposesuchasfastFouriertransform,Hilberttransform,short termFouriertransform,etc.But,alltechniquesfacedsomesortofdisadvantages.Therefore, inthispaper,all shortcomingsofthepreviousused signalprocessing techniqueshave been solvedbynewlywavelettransform’sapproximationsignal.Thelowfrequencyapproximation signalhasbeenusedtodiagnosetheeccentricityfaultinthetransientcondition.Therefore, earlyfault diagnosisofthemotor ispossibleandavertedthe motorbefore reachinginthe ruinousconditions.Asaresult,theindustriesmaysavelargerevenuesandunexpectedfailure conditions.Theobtainedresultsclearlydemonstratethatthedevelopeddiagnostictechnique mayreliablyseparateairgapeccentricityfaultinmanystages.
©2016PublishedbyElsevierGmbH.ThisisanopenaccessarticleundertheCCBY-NC-NDlicense (http://creativecommons.org/licenses/by-nc-nd/4.0/).
夽 ThisarticlebelongstothespecialissueonEngineeringandMaterialSciences.
∗Correspondingauthor.Tel.:+917704079596.
E-mailaddresses:[email protected](K.M.Siddiqui),[email protected](K.Sahay),[email protected]
(V.K.Giri),[email protected](N.Gothwal).
http://dx.doi.org/10.1016/j.pisc.2016.04.014
2213-0209/©2016PublishedbyElsevierGmbH.ThisisanopenaccessarticleundertheCCBY-NC-NDlicense(http://creativecommons.org/ licenses/by-nc-nd/4.0/).
Introduction
Intheindustries,theACelectricmotorsespeciallysquirrel cageinductionmotoriswidelyusedinmanyvariablespeed applicationswithelectronicsinverters.Inorderto substan-tiateandincreasetheproductivity,reliabilityandsafetyof industrialinstallations,apermanentcondition(health) mon-itoringofcriticalmotorsisessential.Becauseofthisreason, theresearchonhealthmonitoringofinductionmotorshave beenwidelystudiedandbecameachallengingtaskformany researchersfordecades(Siddiquietal.,2015a,b,c).
Manyresearchersproposedvariousdynamic modelsfor analysis and fault diagnosis purpose. The dynamic mod-els always consider the instantaneous effects of varying voltage,currents,torquedisturbanceandstatorfrequency (Siddiquietal.,2015a,c;Sahraouietal.,2008).
Mostofthefaultsinthree-phaseinductionmotorshave relationshipwithair-gapeccentricitywhichisthecondition of the unequalair-gap between the statorand the rotor. Thisfaultcanresultfromvarietyofsourcessuchas incor-rectbearingpositioningduringassembly,wornbearings,a shaftdeflection,heavyloadandsoon.Ingeneral,thereare twoformsofair-gapeccentricity:radial(wheretheaxisof therotor is paralleltothe statoraxis) andaxial.Each of themcanbestatic(wheretherotoris displacedfromthe statorborecentrebutisstillturninguponitsownaxis)or dynamiceccentricity(wheretherotorisstillturningupon thestatorborecentrebutnotonitsowncentre)(Siddiqui etal.,2015a;HegdeandMaruthi,2012;Intesaretal.,2011; Sahraouietal.,2008).
Many researchers used stator current parameter for induction motor fault diagnosis purpose because it does notrequire costlysensors. This technique is called motor current signature analysis (MCSA) technique (Hegde and Maruthi,2012;Intesaretal.,2011;Siddiquietal.,2015b). In the past, the fast Fourier transform (FFT) method usedforinduction motorfaultdiagnosis purposebypower spectrums.But,thistechniquehasnotdiagnosedfaultsin the transient condition and variable load.Therefore, the short term Fourier transform (STFT) technique used for faultdiagnosis purposebut it shows poor frequency reso-lutionbecause of constantwindow size.Therefore, there
is a strong need todevelop health monitoring techniques toaddresstheseissuestoallowearlierdetectionofairgap eccentricityfaults.
Inthepresenttime,theacousticsemissionstechnology isalsobeingusedinthehealthmonitoringof therotating machines(Eleshaetal.,2015).Thistechniqueisalsounable todiagnoseinductionmotorfaultsinthetransientcondition efficiently.
Intherecentpast,manyresearchersusedwavelet trans-formtechniquefordiagnosinginductionmotorfaults.But, theyhaveavoidedoneproblem,ifanyfaulthavingverylow frequencythenhowonemaydiagnosetheairgap eccentric-itiesfaultorotherinductionmotorfaults.Therefore,inthe presentpaper,wehaveattemptedtogivesolutionofsuch problemsbyWavelet’slowfrequencyapproximationsignal.
Proposed
simulation
model
and
detection
of
airgap
eccentricity
fault
by
wavelet
transform
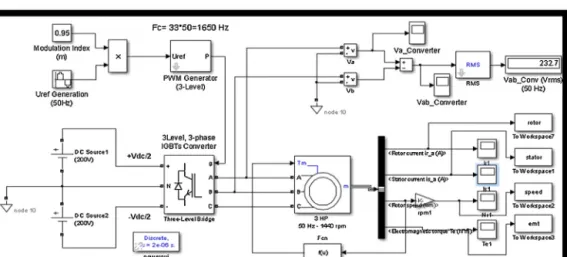
A3hp,220V,50Hz,1440rpmsquirrelcageinductionmotor drivenbypulsewidthmodulated (PWM)inverterhasbeen usedfortheairgapeccentricityfaultdiagnosispurposeand itisasshowninFig.1.Thecompletedetailsofdynamic sim-ulationmodel andmathematicalmodellingof healthyand airgapfaultyconditionsaregiveninSiddiquietal.(2015b). Theline-to-lineRMSoutputvoltageisafunctionofthe DCinputvoltageandofthemodulationindexmisasgiven inthefollowingequation:
VLLrms= m 2 ×
3
2Vdc=m×0.612×Vdc (1) Therefore,aDCvoltageof400Vwithamodulationfactor of0.95yieldsthe232.7VRMSvoltages,whichisthenominal voltageoftheusedinductionmotor.
Time
domain
analysis
for
healthy
and
airgap
faulty
conditions
of
the
motor
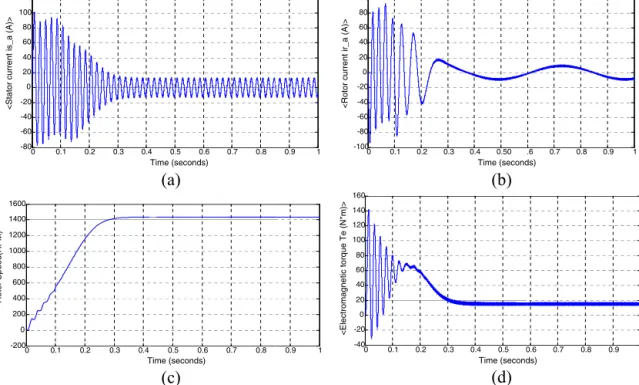
Thesimulationresultsofhealthyinductionmotorcondition are as shown in Fig. 2. In the timedomain analysis, the
-80 -60 -40 -20 100 120
<Stator current is_a (A)>
-200 200 400 600 800 1000 1200 1400 1600 Rotor S peed(RPM) 0 0.1 0.2 0.3 0.4 0 20 40 60 80 0 0.1 0.2 0.3 0.4 0
(a)
(c)
0.5 0.6 0.7 0.8 Time (seconds) 0.5 0.6 0.7 0.8 Time (seconds) 0.9 1 -1000 0.1 -80 -60 -40 -20 0 20 40 60 80 100<Rotor current ir_a (A)>
0.9 1 -400 0.1 -20 0 20 40 60 80 100 120 140 160 <Electromagnetic torque Te (N*m)>
(b)
(d)
0.2 0.3 0.4 0.50 Time (seconds) 0.2 0.3 0.4 0.5 Time (seconds) .6 0.7 0.8 0.9 1 0.6 0.7 0.8 0.9 1Figure2 Healthyconditionofthemotor(a)statorcurrent,(b)rotorcurrent,(c)rotorspeed,and(d)electromagnetictorque.
statorcurrent, rotorcurrent,rotorspeedand electromag-netic torque parameters have been used for the healthy andairgapfaultyconditionspurpose.Forhealthycondition, the slip is set at 1 (s=1) with nominal mechanical load torque15N·m.TheresultsofFig.2(a—d)showthatallfour motor parametershave been reached in the steady state conditionafter0.3s.
The healthy induction motor will be treated as faulty motor;ifwechangeslipandloadtorque.Iftheloadtorque increasesabovetheprescribedlimitofthemotorthenthe airgapbetweenthestatorandrotorwillbechanged. Conse-quently,theunbalancedradialforces(unbalancedmagnetic pullor UMP)maycauserotortorubwithstator.Iffurther increasestheloadtoquewithcorrespondingslipsthenthe
(a)
(b)
(c)
(d)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -40 -20 0 20 40 60 80 100 Time (seconds)<Stator current is_a (A)>
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -50 0 50 100 Time (seconds)
<Rotor current ir_a (A)>
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1240 1260 1280 1300 1320 1340 1360 1380 1400 1420 1440 Time (seconds) Rotor Speed (RPM) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -100 -80 -60 -40 -20 0 20 40 60 80 Time (seconds) <Electromagnetic torque Te (N*m)>
Figure3 Airgapeccentricity(20%)faultyconditionofthemotor(a)statorcurrent,(b)rotorcurrent,(c)rotorspeed,and(d) electromagnetictorque.
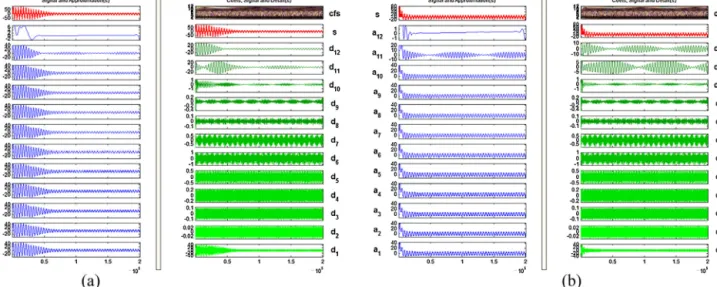
Figure4 Separatedecompositionofthestatorsignal(a)healthyconditionand(b)bearingfaultycondition.
airgapeccentricitybecomeslarge.If,theairgap eccentric-ityirregularityconditionnotdiagnosedontimethendrastic consequences will betaken place in the whole industrial plant.
IfweobserveFig.2(a—d)andFig.3(a—d)canconclude that a efficient airgap fault has been diagnosed in the transientconditionduetonon-intrusivenatureofthe wave-forms.Inthenextsectiononlystatorcurrentsignalisused
Figure5 Approximationsignals(a)healthycondition,(b)20%changeinairgapcondition,(c)30%changeinairgapcondition,and (d)40%changeinairgapcondition.
forthefaultdiagnosispurposeduetoimportantfeaturesof MCSA.
Time-frequency
domain
analysis
for
healthy
and
airgap
faulty
conditions
of
the
motor
In this section, the airgap eccentricity fault has been diagnosedbywavelettransformformanystagesby approx-imationsignals.Thesewavelet’sparametershasbeenused forhealthyandairgapeccentricityfaultdiagnosispurpose; datasize:200002,wavelet:debauchees(dB-10), decompo-sitionlevel:12,waveletmethods:separatedecomposition andtreedecomposition.
The samplingfrequencyischosen andsetat5kHz.The original stator current signal has been decomposedup to 12thlevelforextractionoflowfrequencyinformation.The 12th level approximation signal contains frequency band 2.44—1.22Hz.Fig.4(aandb)clearlyexplainswhywehave doneupto12thleveldecomposition.
Now, we have chosen only 12th level low frequency approximationsignalforairgapeccentricityfaultdiagnosis purpose.Here,wehaveobtainedseriesofsimulationresults fordiagnosingtheairgapeccentricityfaultforchangeinthe airgap20%,30%and40%.Duetothenon-intrusivenatureof thewaveforms,itmaybeobservedthatallthefiguresare completelydifferentfromeachother.Forclearunderstating purpose,observestartingandendpointofthewaveforms. Hence,wemaysaythat,efficientairgapeccentricityfault detectionhasbeenpossiblebythismethodinthetransient condition. Similarly, inthe future, theairgap eccentricity faultmayalsobediagnosedforvariableloadconditionsby usingthistechnique(Fig.5).
Conclusions
In this present paper, the airgap eccentricity fault of the squirrel cage induction motor has been diagnosed in the transient conditionwith proposeddynamic simulation model.Thewavelettransform’slowfrequency approxima-tionsignalhavebeenusedtodistinguishhealthyaswellas faultyairgapmotorconditions.Thismethodmaybethe bet-tersolutionfortheindustriesfordiagnosingtheairgapfault withcompetitivepricingascomparedtootherdigitalsignal processingmethods.
Conflict
of
interest
Nonedeclared.
Acknowledgements
Authors acknowledge Technical Educational Quality Improvement Programme Phase-II, Electrical Engineering Department,InstituteofEngineering&Technology,Lucknow (Dr.APJ Abdul KalamTechnical University,UttarPradesh, Lucknow,India)forprovidingfinancialassistantshiptocarry outtheresearchwork.
References
Elesha,F.,Greaves,David,M.M.,Addali,A.,2015.Applicationof acousticemissionindiagnosticsofbearingfaultswithina heli-coptergearbox.In:Proc.ofthe4thInternationalConferenceon Through-LifeEngineeringServices,vol.38,pp.30—36.
Hegde, V., Maruthi, G.S., 2012. Experimental investigation on detection of air gapeccentricity ininduction motors by cur-rentandvibrationsignatureanalysisusingnon-invasivesensors. In: Proc.2nd InternationalConferenceonAdvancesinEnergy Engineering(ICAEE),vol.14,pp.1047—1052.
Intesar,A.,Manzar,A.,KashifImran,M.,ShujaKhan,S.,Junaid, A., 2011. Detection of eccentricity faults in machine using frequencyspectrumtechnique.Int.J.Comput.Electr.Eng. 3 (February(1)),111—118.
Sahraoui, M., Ghoggal, A., Zouzou, S.E., Benbouzid, M.E., 2008. Dynamiceccentricityinsquirrelcageinduction motors-simulation and analytical study of its spectral signatures on stator currents. J. Simul. Model. Pract Theory 16 (August), 1503—1513.
Siddiqui,K.M.,Sahay,K.,Giri,V.K.,2015a.Modellinganddetection of bearingfault inSPWMinverterfedsquirrelcageinduction motordrives.In:IEEEInt.Conf.Proc.,Circuit,Powerand Com-puting Technologies, ICCPCT-2015, Kanyakumari, Tamil Nadu, India.
Siddiqui,K.M.,Sahay, K.,Giri,V.K., 2015b. Diagnosis ofair-gap eccentricityfaultforinverterdriveninductionmotordrivesin thetransientcondition.i-manager’sJ.Instrum.ControlEng.3 (November—January(1)),30—41.
Siddiqui, K.M., Sahay, K., Giri, V.K., 2015c. Detection of bear-ing fault in inverter fed induction motor by transformative techniques. In: 12th IEEE Int. Conf. Proc., Electronics, Energy, Environment,Communication,Computer,Control (E3-C3),Indicon-2015,NewDelhi,India.