International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 4, April 2015)
38
Some Problems of Synthesis Servo Systems with Wave
Channels
A.N.Yusupbekov
1, A.O.Ataullayev
21,2,
Department of Electronic and Automatic, Tashkent State Technical University, Universitetskaya st.2, 100095, Tashkent city, Republic of Uzbekistan
Abstract – It is shown that by using the measurement results, "weedy" noise linear combinations of state variables of the object, their evaluation can be obtained by applying a filter consisting of a "model" of the original system and the feedback signal proportional to the difference between the actual measurement and estimate Coy. The combination of the optimal filter and deterministic optimal control is a feedback controller that is optimal in the sense of the ensemble average for a linear problem with a functional and additive-tie Gaussian white noise, when the principle is valid or stochastic equivalence theorem on reparability. The law is the optimal control by minimizing the ensemble averaged quadratic functional quality system.
Keywords – Radio tracking systems, systems with wave channels, measurer, regulator, estimator, the specified portion of the servo system controls, regulators.
I. INTRODUCTION
The structure of wireless devices and systems typically include automatic system theme as well as monitoring of electromagnetic wave parameters: direction of his arrival, a temporary position, frequency and phase. Such systems are characterized by knowledge-restrictive specificity compared to other automatic control systems, and they are isolated in a separate class of systems called by radio tracking systems (RTS) [1, 2, 3]. Meanwhile, more correctly described as their watching systems with wave channels (WSWC), as currently these systems operate in the frequency, optical, and X-ray radiation ranges.
WSWC used as tracking discriminators to determine the parameters of mutual and proper motion of lethal devices [4]; Automatic tracking the direction and distance [5]; for automatically determining the relative velocity of objects [6]. An important feature is the possibility of losing WSWC support as a result of the termination or for any other reasons, as well as under the influence of specially organized interference.
Until recently, used to calculate WSWC or method of frequency characteristics, leading to the selection of the correction link, or the method used for the projection of information processing devise - linear and nonlinear filters [2].
It should be emphasized that this approach does not take into account the effect of the structure of its properties. The problem of calculating the actual electronic tracking system differs significantly from the corresponding problem of calculating the filters and requires special consideration. This difference occurs for the following reasons:
1.The instantaneous values of the desired signal at the output often have to be equal to the corresponding values of the input signal. This requirement is more stringent WSWC compared with the appropriate requirements in calculating the filter, wherein a delay is allowed in a desired playback signal.
2.Much of the elements WSWC can be pre-set, that is an engineer can’t freely dispose of them. There is only a certain freedom in the choice of correction, which is used for a given element. In the filters, on the other hand, the conditions of the problem rarely include the requirement of constant elements.
3.WSWC disturbances can act not only at the entrance, but also in other points. In some case, reduce the impact of these disturbances on the output signal can be the basis-requirements. When calculating the filter problem disturbances (attached at points, the different from input) does not arise at all or not put so harshly.
4.WSWC deals with the elements, the parameters of which are given inaccurate and unstable over time. In particular, these are electromechanical, pneumatic and hydraulic and other elements that are used in the output stages WSWC.
Of course, impossible deny the fact that in WSWC and filters have a lot in common. Those and other processing associated with the process and system information are feedbacks.
Existing methods of optimal control theory allow for a fresh walk in the design of such systems.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 4, April 2015)
[image:2.612.66.545.152.652.2]39
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 4, April 2015)
40
Today is composed of practice of using this approach shows its fruitfulness [7, 8, 9]. This improves the accuracy characteristics WSWC, increases the efficiency of the design, because the method is well adapted to automate this procedure.
II. EXPOSITION
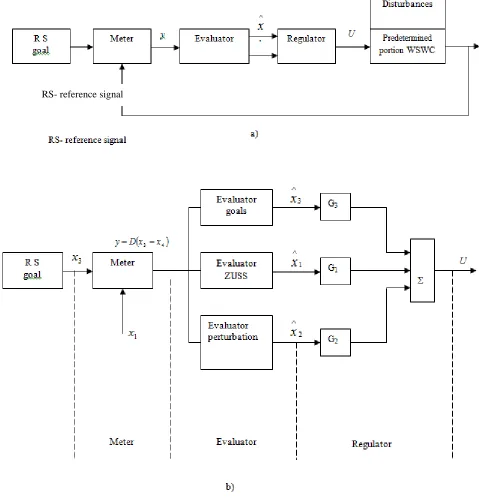
We formulate the synthesis problem WSWC [10]. Fig. 1 is a block diagram WSWC. Radiofrequency tracking system consists of a predetermined portion of the discriminator estimator and regulator. Specified portion WSWC depends on its purpose. Thus, for example, measures for goniometric predetermined portion of the sensing device will include an antenna (for-example, a phased array), and actuators measuring system. In the case of automatic frequency tracking the specified portion will consist of the direct-tunable oscillator, the oscillation frequency control device generator, measuring and converting devices and that other losses.
Synthesis of optimal control laws WSWC can be carried out modes:
- Tracking provides the lowest static and dynamic errors;
- Scan provides an overview of the space in the shortest possible time (this also applies beam mode transition from one steady state to another in the shortest possible time);
- Automatic correction of the phase front of the electromagnetic wave is formed when a pattern, etc .; - Auxiliary tasks (such as synthesis WSWC automatic
gain control, automatic frequency control, and the like).
WSWC specified portion consists of a measuring instrument (discriminator) and controlled portions, as well as the reference signal on the dynamics of the target.
Feature meters with the wave tracking systems is that channels that are available in the channel in which the signal is transmitted by means of high-frequency electromagnetic-waves. The frequency range is dependent upon the type of servo system, and may vary within wide limits (from rigid to radio frequency radiation). Inputs discriminatory tori in this case are electromagnetic waves with a wavelength determined by type of tracking system.
This circumstance has great importance and is different sign of servo systems with wave channels.
Reflected from the target signal is amplified by the receiver, the output of which is removed narrowband random process, which is a mixture of additive-conjugated reflected signal and noise [11].
Table. 1 shows the main types of discriminators used in servo systems with wave channels.
In the angular tracking systems as a measuring device used finders, differ in the way of formation of the beam.
In the direction-finding devices with a serial comparison of the signals used one antenna and a single-channel receiver. The antenna pattern is moved in the space (scans) to the period Tc.
The measurement of the angular misalignment is performed periodically comparing measurable sculpt envelope radio or optical signal with the reference oscillation, synchronized with the movement of the chart. The measurement time is comparable with Tc.
In direction-finding devices with simultaneous comparison of signals or instantaneous equisinal area (also called single-pulse) is used antenna system, forming four separate (partial) pattern, as well as multi-channel receiver. Angular misalignment is determined by comparing the received signals simultaneously. At this time, the measurement time is commensurate with the measurement time of processing signals in the forward path, that is, can be quite small.
Possibility of application of amplitude, phase, and amplitude-phase direction finding methods and different signal processing circuit led to the construction of a large variety of monopoles direction-finding devices.
The signals at the output of the phase or frequency meter depend on Ω or Δφ1, where Ω = (fin-f) and Δφ1 = (φin-φ), respectively.
Questions of analysis and synthesis of optimal and quasi-optimal discriminators examined in detail in [12]. There, also reviewed, digital implementation methods of estimators.
The tracking system for target position as the controlled portions can have antenna with-driven or phased or phase-locked antenna - grid with electrical control of spatial modulation of the beam.
From the point of view of the analysis and synthesis of systems present appropriate all variables characterizing the system or having a certain attitude to it are classified into the following groups:
- Input variables or input actions ui, representing the
signals generated by systems external to the study, and influencing the behavior of the system;
- Holiday observed variables or variables that characterize the system response yj and allows to describe some
aspects of the behavior of the system;
Variables (coordinates) of the state or intermediate variables хк, -binders characterized the dynamic behavior of
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 4, April 2015)
41
TABLEI
THE MAIN TYPES OF DISCRIMINATORS AS A PART OF THE RADIO ENGINEERING WATCHING SYSTEMS Type
systems
Key of characteristic
Name and designation of
measuring instruments
The meter output
g x t
y ,
Discriminatory characteristics and equivalent circuit of the meter
Noise measurements Angular support DF device (measuring angles). Measures the angle between the direction of the target, from which at Niemann-electromagnetic signal, and the mounting axis.
g qt Un ,
a
u
r
r
q
a
r
- The angle between the axis of the mounting and RSH.Linear approximation of the DF unit
; Q K r r K u ny a u nyn
0 Q Q u K n ny - Interference received, along with Cigna-scrap input and internal noise of the receiver; - Angular noise objectives; - Amplitude noise objectives.
Tracking in range Meter time position of the pulse signal; time selector.
g
t
u
в.д.,
The linearized characteristic:
.. ..д вд
в K u ,
.. . . д в д в u K =0- Interior noise of the receiver; - External radio frequency noise; - Fading signal; - Amplitude noise; - Fluctuation displacement of the center of reflection. Tracking the frequency and phase Phase frequency discriminators. Measure the frequency difference or phase difference between their set points and actual values.
,
..,
..д чд
в
g
t
u
,
...
..д фд
ф
g
y
t
u
linearized characteristics , . . . . ..д чд чд
ф K u
. . . . . .
.д фд фд
ч K
u
- Interior noise of the receiver and like.
At any time, the state of the system is a function of the initial state of x
t0 and the input vector u (t, t0), that is,х(t)=f [х(t), u(t), t]. (1) This is a vector differential equation can be written in scalar form:
xk(t)=fk [х(t), u(t), t], (2)
where k=1, 2, …, n.
Equations (1) and (2) are the equations of state of a dynamic process.
Vector output (measured output) is defined by:
yj(t)=gj [х(t), u(t), t] (3)
or
y(t)=g [х(t), u(t), t],
u
+
Q
ny
K
un ω ur
– ar
u
Q
+ . .д вK
. .д вu
ζ вхr
– ur
u
+ Ω
K
выхu
ζ 0f
–
y
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 4, April 2015)
42
Which is applicable in most tasks WSWC (Equation discriminator).
Finally, in some WSWC saturates, so that the dynamic process should be included equation saturation process:
u(t)
U, x(t)
x. (4) Symbol u(t)
U indicates that the vector u(t) lying within or on the boundary of a closed-mentioned regionU(t) of the vector space.
An example of the saturation equation can serve as a ratio
-Ui ≤ ui (t) ≤ Ui,, i = 1, 2, …, n. (5)
For linear control part WSWC convenient to introduce some additional notation.
Equation of state in this case can be conveniently written in the form:
х(t) = Ax(t) + Bu(t) Cv(t), (6) Where x(t) - n-dimensional state vector; u - m -dimensional vector management; v - n-dimensional vector of disturbances.
The equation of the output signal to be measured may be represented as:
Y(t) = Dx(t) +W(t), (7) Where W(t) - noise measurement.
If the dynamic process is not linear and saturation occurs, the saturation equation-of simply omitted.
In equations (6) and (7) of A, B and C have the form:
; ... ... ... ... ... ... ... 2 1 2 22 21 1 12 11 t a t a t a t a t a t a t a t a t a A nn n n n n
; ... ... ... ... ... ... ... 2 1 2 22 21 1 12 11 t b t b t b t b t b t b t b t b t b B nn n n n n (8)
; ... ... ... ... ... ... ... 2 1 2 22 21 1 12 11 t c t c t c t c t c t c t c t c t c C nn n n n n
; ... ... ... ... ... ... ... 2 1 2 22 21 1 12 11 t d t d t d t d t d t d t d t d t d D nn n n n nWhere A - the coefficient matrix is inversely proportional to the time constant; B - matrix management; C - matrix perturbation; D - output matrix.
In the existing literature on WSWC widely reported frequency analysis methods using transfer functions. Thus, the application of variation al principles preferred description of the object in the time domain. It is necessary to make the transition from the transfer functions to the differential equations in the state variables.
Schemes of continuous technological facilities in the state variables coincide with the schemes of data modeling systems on analog computers. In the special-term literature radio automatics transfer function of a linear dynamic process, usually approximated by the relation of the form:
, 0 1 0 1 1
n i i i n i i i p a p d p u p y pW (9)
Where y1(p) and u1(p) - Laplace transform of functions
y1(p) and u1(p) with zero initial conditions.
Without loss of generality, we can put an = 1. From (9)
we pass to the differential equation:
1
.0 1 0 1
n i i i n i iiy t du t
a (10)
Next, we introduce a new variable xn(t), so that equation
(10) is equivalent to the equation:
; 1 0 t u t x a n i i n i
(11)
; 1 1 0 t y t x d n i i n i
(12)Finally, by introducing new variables
t x 1
t,i 1,2,...,n
;xi i (13) Equation reduces (11) to the form:
n i i i ni t a x t u t
x
1
1 .
(14)
Similarly, equation (14) is transformed to the following form:
n i i n x td t y
1 1
1 . (15)
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 4, April 2015)
43
Dynamics goal is unmanageable given part WSWC. The trajectory of the target in the present case, is a random function. Therefore, to describe the use of the corresponding conductive-mathematical apparatus [2].
Dynamics model target is required in order to permit prediction (extrapolation) of the trajectory to provide optimum tracking and to interrupt the flow of information in the wave channel.
In case of optimal tracking algorithm that generates a control signal, extra-bright forward time τ, requires knowledge as the target state, and a predetermined portion SWWCH at time τ. In other words, the necessary mathematical models and given parts of WSWC, as well as knowledge of the initial conditions.
To simulate the dynamics of the target with the purpose of the forecast of its state using Gaussian-Markov random process (sequence), represented as a vector with a continuous-state linear dynamical systems excited by Gaussian purely random process, and having a Gaussian vector of the initial state [14]:
2
,2 Et x Ft nt
x
(16) Where х2 – n-dimensional vector; n(t) – m- dimensional
vector.
Depending on the range of disturbance (in this case - the target) perturbation-message may be simulated or white noise (if the perturbation spectrum exceeds the bandwidth of the system), or "colored" - correlated.
Experimental determination of the parameters of equation (16) can be accomplished by the use of transition
S W j
R differential equation, (17) Where R- Experimentally determined autocorrelation function;
2.
W j S
From here it is easy to go to the differential equation (16).
Optimal control theory focuses mainly on the prediction of sequence-control or in the form of continuous functions of time, that when applying them to the control part of servo systems with wave channels at a given time interval in the future forced her to work in some sense optimal. It should be an exact knowledge of the initial state of the controlled portions SWWCH and dynamic characteristics of the object.
The first step in the synthesis of the tracking system is to validate a quality criterion that characterizes the overall error for the entire period of work WSWC.
To this end, the uses a scalar value obtained by integrating over the interval control of some measure of error that the essence function state variables and control [15].
Then used the ideas of calculus of variations to obtain the necessary conditions that must be satisfied extremals. By definition, the extremals are time dependent control functions and status corresponding to an extremum of the error criterion. These conditions have the form of a system of differential equations with certain boundary properties (for example, the Euler-Lagrange equations or conjugated). The same conditions can be expressed by equations of Pontryagin and show here that a common and important special case when the amplitude of the control is limited, as a necessary condition can be successfully applied maximum principle.
Requirements for WSWC largely determined by the nature of the problem being solved. This can be a problem tracking, quick translation task, for example, en-antenna of from one state to another - given the task of forming the phase front electromagnetic wave, and so.. These requirements formulated in the language of mathematics, is a measure of the quality of work or WSWC cost function.
Necessary conditions are also obtained when using the procedure of dynamic-programming in the form of differential equations of Hamilton-Jacobi. The solutions of these equations can be obtained for a limited class of equations conditions and quality criteria. Necessary conditions are expressed in the form of differential matrix equation of Rikkati.
There is a close relationship between these methods. For the problem of optimal management system is defined as a system that minimizes a given quality criterion for a specific dynamic process under given constraints.
The last may consist in that the control system must be linear or have any particular structure elements and etc. It should be noted that the above definition of the optimum system is based on a mathematical model of the problem being solved. If the mathematical model of change, the minimization can lead to another control law.
III. CONCLUSION
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 4, April 2015)
44
The combination of the optimal filter and deterministic optimal regulator is a regulator with feedback, optimal in the sense of the average over the ensemble for a linear problem with a functional and additive Gaussian white noise when the principle is valid or stochastic equivalence theorem of separability. The law is the optimal control by minimizing the ensemble average of a quadratic functional quality system.
Thus, the problem statement is made meaningful synthesis of the optimal servo system with wave channels, reduced to the problem of minimizing the functional in the form of an integral of the square of the error control measures to control the range in the future.
REFERENCES
[1] Yarlykov M.S. 1985. Statistical theory of navigation. M.: Radio and Communications.
[2] Pervachev S.V., Chilikin V.M. 1999. Digital systems
radioautomatics. M.: Publishing House of the MEI.
[3] Bakulev P.A. 2004. Radar systems: Textbook for universities, "Radio".
[4] Ataullaev A.O. Optimal problem in tracking systems with wave channels // Scientific and technical journal "Chemical technology. Control and management. ", 2010, in press.
[5] Yusupbekov A.N., Artikov S.Z., Ataullaev A.O. Accounting
disturbances and noise measurements in tracking and Control Systems // Journal, "Standard", 2012, in press.
[6] Kazarinov Y.M., Grishin Y.P., Ipatov V.P. 1990. Radio systems. M.:
High School.
[7] Yusupbekov A.N., Temerbekov B.M., Ataullaev A.O. Apply
artificial neural networks to evaluating the parameters of the state of the mobile object based on the results of measurements // Scientific and technical journal "Chemical technology. Control and management", 2012, in press.
[8] Simon Haykin. 1996. Adaptive Filter Theory // Third Edition. PRENTICE HALL.
[9] S.V. Pervachev, Fam Hay Chung. Adaptation of radio digital servo systems with unknown intensity dynamic effects // Bulletin of the MEI, 2005, in press.
[10] Konovalov G.F. 1990. Radio automatics. M.: High School.
[11] Leondes K.T. 1980. Filtering and stochastic control in dynamical systems: Trans. from English.// M.: World.
[12] Ataullaev A.O., Rakhmonova G.H. The mathematical description of
the process of tracking control systems with wave channels// Proceedings of the VI International Scientific and Technical Conference "Modern Techniques and Technologies mining industry and ways of development", 2013, in press.
[13] Yusupbekov A.N., Temerbekova B.M., Ataullaev A.O. Apply
artificial neural networks to evaluating the parameters of the state of the mobile object based on the results of measurements // Scientific and technical journal "Chemical technology. Control and management", 2012, in press.
[14] Yusypbekov A.N., Ataullaev A.O. Implementation of intelligent servo system with a wave channels // Eighth world conference on intelligent systems for industrial automation «WCIS - 2014», 2014, in press.
[15] Gulyamov Sh.M., Yusupbekov A.N., Rashidov Y.R., Ataullaev A.O.