2017 3rd International Conference on Computer Science and Mechanical Automation (CSMA 2017) ISBN: 978-1-60595-506-3
Robust Controller Design for Uncertain Lure Systems
Guaranteeing Dichotomy Behaviors
Dun AO
1,a,*and Xue-Li WANG
2,b1Faculty of Information Technology, Beijing University of Technology, Beijing, 100124, China
2
Faculty of Information Technology, Beijing University of Technology, Beijing 100124, China
a
[email protected], [email protected]
Keywords: Lure system, Parameter uncertainties, Dichotomy, Controller.
Abstract. This paper focuses on the robust controller design problem of Lure systems with parameter uncertainties. Using matrix theory, the sufficient condition for the dichotomy of uncertain Lure systems is first presented. Furthermore, the methods of designing a state feedback controller and a dynamic output feedback controller for uncertain Lure systems guaranteeing dichotomy are proposed separately. Finally a numerical example is included to show the effectiveness of the proposed approach.
Introduction
The global behaviors of nonlinear systems with multiple equilibria have attracted more and more attention. The analysis and synthesis problem of such systems are much different from systems with single equilibrium. The nonlinear systems have various global behaviors such as Lagrange stability [2-4], dichotomy [5-12], gradient-like [13-16], Bakaev stability and so on.
The frequency-domain inequality condition for the dichotomy behavior of a class of nonlinear systems was obtained in Leonov et al. (1996) [1]. A state feedback controller is designed to eliminate the chaotic phenomena by guaranteeing the chaos system dichotomy [5]. Gradient-like and dichotomy behaviors of pendulum-like dynamical networks systems are considered in [6]. The method of controller design for pendulum-like system guaranteeing dichotomy is proposed by KYP lemma and positive real control in [7]. Mixed real/complex dynamic uncertainties are concerned and the condition of robust dichotomy of the Lure system is obtained in [8]. In [9], a dynamic output feedback controller is designed for Lure systems guaranteeing dichotomy which is less conservative than previous papers. The effects of interconnections are discussed in [11-12]. However the uncertainties are not considered in [7] and [9], which cannot be avoided in practice. Although uncertainties are concerned in [8], the dichotomy controller is not studied.
Based on the mentioned above, this paper is devoted to designing controllers with less conservativeness for uncertain Lure systems. A LMI-based method for dichotomy analysis of the uncertain Lure system is first presented. And a state feedback controller and a dynamic output feedback controller are designed separately for the uncertain Lure system guaranteeing dichotomy.
Preliminaries and Problem Statement Consider the following Lure system
x=Ax+Bϕ σ( ), σ =Cx+Dϕ σ( ), (1)
where n n
A∈R × has no eigenvalues on the imaginary axis, B, T n
C ∈R , D∈R , and the
nonlinear function ϕ:R→R is piecewise continuously differentiable. ϕ σ′( ) exists for all
σ
∈R,and there exist two numbers µ1 and
2
µ such that
1 2 , .
d
R d
ϕ
µ µ σ
σ
−∞ < ≤ ≤ < +∞ ∀ ∈
The transfer function of the linear part of (1) from the input ϕ to the output −
σ
is1
( ) ( )
G s =C A sI− − B−D.
Lemma 2.1[8] Suppose (A, B) is controllable, (A, C) is observable, and ( )G s ∈RL∞. System (1) is quasi-dichotomous, if there exist a matrix P=PT
and numbers ,γ χ ε, >0, τ >0 such that
( )
2
( ) 0,
2
T T T T
T T
He PA C C PB C C D C
He D D D D
τ τ
τ χ
ε ε α
χ
ε γ α
τ
+ + +
∗ + + <
∗ ∗ −
(3)
where ετ =ε−τµ µ1 2 and 1 2 2
µ µ α=τ + .
Lemma 2.2[16] If all requirements of Lemma 2.1 are true and the matrix A is Hurwitzian, then system (1) is dichotomous.
Lemma 2.3[16] If all requirements of Lemma 2.1 are true and ( )ϕ σ has a finite number of
isolated zeros, then system (1) is dichotomous.
Lemma 2.3[17] For any constant matrices T1, T2, a symmetric matrix Q and a matrix F
satisfies F FT ≤λ2I. Then Q+He
1 2
(T FT)<0 holds if and only if 2 1
1 1 2 2 0
T T
Q ηλ T T η−T T
+ + < ,
0
η> .
Main Results
In this section, the sufficient condition for uncertain Lure system being dichotomous is presented. And the methods of designing a state feedback controller and a dynamic output feedback controller guaranteeing the closed-loop system dichotomy behaviors are proposed respectively.
Robust Dichotomy Analysis
Consider the following uncertain Lure system
( ) ( ) ( ), ( ),
x= A+ ∆A x+ B+ ∆Bϕ σ σ=Cx+Dϕ σ (4)
where A, B, C, D and ϕ are defined as in Section 2, and ∆A, ∆B have the form of
(5)
where H∈Rn i× , 1
j n
E ∈R ×
,
1 2
j
E ∈R ×
are known constant matrices, and i j
F∈R× is an unknown matrix satisfying F FT ≤λ2I with is a known constant.
Theorem 3.1 Suppose (A, B) is controllable, (A, C) is observable, and ( )G s ∈RL∞. System (4) is quasi-dichotomous, if there exist a matrix P=PT
and numbers ,γ χ ε, >0, τ >0,η>0 such that
2 2
1 1 1 2
2 2 2
( )
2
( ) 0 0,
2
T T T T T T
T T T
He PA C C E E PB C C D E E C PH
He D D D E E D
τ τ
τ
χ
ε ηλ ε ηλ α
χ
ε ηλ γ α
+ + + + +
∗ + + +
<
(6)
(
∆A ∆B)
=HF E(
1 E2)
,0
Proof Denote
( )
2 ( ) 2
T T T T
T T
He PA C C PB C C D C
M He D D D D
τ τ
τ
χ
ε ε α
χ
ε γ α
τ
+ + +
= ∗ + +
∗ ∗ −
. By Lemma2.1, system (4)
quasi-dichotomous if exist a matrix P=PTand numbers ,γ χ ε, >0, τ >0such that
( ) 0
0 0 0
0
He P A P B
M
∆ ∆
+ ∗ <
∗ ∗
. (7)
Let 1
(
0 0)
T
T = PH
, T2=
(
E1 E2 0)
. Inequality (7) can be rewritten as1 2
( ) 0
M +He T FT < . By Lemma 2.3 and Schur complement, the above inequality holds if and only if there is a positive
number η>0 such that
2
2 2 1 1
0
T T
M T T T
T I
ηλ
η
+
<
−
. From the above inequality we get (6) and the proof
is completed.
Remark 3.1 In [5], the frequency domain inequality is
1 1
2 2
1 2
1
( ) ( )
0 2
( )
T T T
T T
T
C C DC C A C
B j A B j A
I D D B I
τ τ
τ
ε ε χ α
ω ω
ε τ µ µ τω
− −
− + − −
<
∗ − + −
,
and τω2 is supposed to be zero, which is more conservative than Lemma 2.1.
τ
is set to be zeroin [6], and
τ
is set to be identity matrix, and γ =0 in [8]. We can see that each of the conditions obtained above is just one of the situations forτ
or γ. Theorem 3.1 is obtained directly fromLemma 2.1, which is less conservative than the sufficient conditions in [5, 6, 8].
Corollary 3.1 If all requirements of theorem 3.1 are true and matrix A is Hurwitzian or ( )ϕ σ has
a finite number of isolated zeros, system (4) is dichotomous.
Proof Corollary 3.3 can be obtained directly from Lemma 2.2 and Lemma 2.3.
Controller Design
Based on the above results, the methods of designing a state feedback controller and a dynamic output feedback controller for system (4) guaranteeing dichotomy are proposed.
Consider the following Lure system
1 2
( ) ( ) ( ) ( ),
x= A+ ∆A x+ B + ∆Bϕ σ +B u,σ =Cx+Dϕ σ (8)
where A, C , D and ϕare defined as in Section 2,
1
B is the same as B in system (1), u∈R is the control input and ∆A, ∆B satisfying (5). The state feedback controller has the form u=Kx.
The closed-loop system is
2 1
( ) ( ) ( ), ( ).
x= A+ ∆A+B K x+ B + ∆Bϕ σ σ=Cx+Dϕ σ (9) Theorem 3.2 The closed-loop system (9) is quasi-dichotomous with respect to (5), if there
exist numbers ,γ χ ε, >0, τ >0,η >0, matrices
1
B has a full column rank, P=PT and
11
2
2 2
1 1 1 1 2 1
2 2 2
( )
2
( ) 0 0,
2
0
T T T T T T T
B
T T T
He PA T Y C C E E PB C C D E E C PH
He D D D E E D
I
τ τ
τ χ
ε ηλ ε ηλ α
χ
ε ηλ γ α
τ η + + + + + +
∗ + + + <
∗ ∗ − ∗ ∗ ∗ − (10)
satisfies, where
2 2 T B B
P=T PT ,
(
)
1 0
T
Y = Y , Y1=P K11 , 11
22 0 0 P P P =
, 2
1 2 2 2
2
( T ) T B
B B B
T B − ⊥ =
. And
the gain matrix 1 11 1
K =P Y− .
Proof By theorem 3.1, the closed-loop system (9) with respect to (5) is quasi-dichotomous if there exist a matrix P=PTand numbers ,γ χ ε, >0, τ >0,η >0 such that
2 2
2 1 1 1 1 2
2 2 2
( ( ))
2
( ) 0 0.
2
0
T T T T T T
T T T T
He P A B K C C E E PB C C D E E C PH
D D D D E E D
I
τ τ
τ
χ
ε ηλ ε ηλ α
χ
ε ηλ γ α
τ η + + + + + + ∗ + + + + < ∗ ∗ − ∗ ∗ ∗ − (11) Let 2 2 T B B
P=T PT , we have
(
)
2 2 2
2 2 11 0
T
T T
B B B
PB K =T PT B K =T P K . From the above equality and (11)
we have inequality (10). By Y =
(
Y1 0)
T and 1 11Y =P K , we have 1 11 1
K =P Y− . Theorem 3.2 is
proved.
Corollary 3.2 If all requirements of theorem 3.2 are true and matrix A is Hurwitzian or ( )ϕ σ
has a finite number of isolated zeros, system (9) is dichotomous.
Proof Corollary 3.2 can be obtained directly from Lemma 2.2 and Lemma 2.3.
Next, the dynamic output feedback controller is considered. The uncertain Lure system is
1 2
1 11 2 21
( ) ( ) ( ) ,
( ), ( ),
x A A x B B B u
C x D y C x D
ϕ σ
σ ϕ σ ϕ σ
= + ∆ + + ∆ +
= + = +
(12)
where A, ϕ and u are defined as in Section 2, B1, C1, D11 are the same as B, C, D in system (1),
matrices B2, C2, D21 have appropriate dimensions respectively and y∈R is the measured output. The dynamic output feedback controller has the form of
, .
k k k k k k k
x = A x +B y u=C x +D y (13) The closed-loop system is
( ), ( ),
cl cl cl cl cl cl cl
x =A x +B ϕ σ σ =C x +D ϕ σ (14)
where
(
21)
11,12
, cl cl , k k ,
cl k k
k cl cl k k
x A B A A B B B A B
x J C D J D D
x C D C D D C D
Theorem 3.3 The closed-loop system (14) is quasi-dichotomous with respect to (5), if there exist numbers ,γ χ ε, >0, τ >0, η>0,
1
B has a full column rank, T cl cl
P =P and Pcl11is invertible such that
2 2
1 1 21 1 2
2 2 2
ˆ ˆ ˆ ˆ
( )
2
( ) 0 0
2
0
T T T T T T T T
cl B cl B
T T T T
He P A T YC C C E E P B T YD C C D E E C PH
D D D D E E D
I
τ τ
τ
χ
ε ηλ ε ηλ α
χ
ε ηλ γ α
τ η + + + + + + +
∗ + + + + <
∗ ∗ − ∗ ∗ ∗ − (15)
satisfies, where 11 22 0 0 cl cl cl P P P = , 1 T T B T − ⊥ =
(B B)B
B . And the gain matrix
1 11 2
k cl
J =P Y− .
Proof Let ετ >0, for system (14), Theorem3.1 can be rewritten as
2
21 1 2
2 2 2
ˆ ˆ
(
2
( ) 0 0
2
0
T T T T
cl k
T T T T
P B BJ D C C D E E C PH
D D D D E E D
I τ
τ
χ
ε ηλ α
χ
ε ηλ γ α
τ
η
Λ + + + +
∗ + + + + <
∗ ∗ − ∗ ∗ ∗ −
, (16)
where 2
1 1
ˆ ˆ
( ( )) T T
cl k
He P A BJ C
ε
τC Cηλ
E EΛ = + + + . P BJcl k =T P T BJBT cl B k =TBT
(
Pcl11Jk 0)
T
with
,
T cl B B P =T PT
. From the above equality and (16), we can have inequality (15). And by
(
2 0)
T
Y = Y
and Y2 =Pcl11Jk, Theorem 3.3 is proved.
Corollary 3.3 If all requirements of theorem 3.3 are true and matrix Acl is Hurwitzian or ( )ϕ σ
has a finite number of isolated zeros, system (14) is dichotomous.
Numerical Example
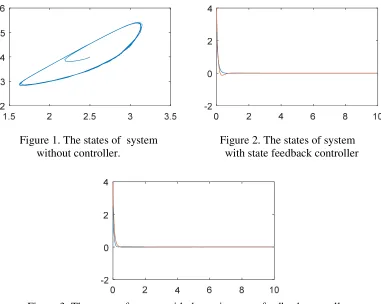
Consider the Lure system (1) with parameters A=(-5 3; 0 -0.1), B=(-1.2 1)T, C=(2 -1), D=-0.4 and the nonlinear function is ( )ϕ σ =sin ( )σ -0.2. It is obvious that
1 2
( )
1 d 1.
d
ϕ σ
µ µ
σ
− = ≤ ≤ =
With initial value (2.5 4), the states of the above Lure system are shown in Fig.1, which show that this system is not dichotomous.
The other parametersof the uncertain Lure system (9) are B2=(1 2)T, C2=(1 -1), D21=1, E1=(0.1 0.2), E2=0.1, H=(0.5 1)T. By theorem 3.2 and corollary 3.2, the parameters obtained for state feedback controller are P=(92.1845 0; 0 92.1845), Y=(-537.6581 -297.2788; 0 0), K=(-5.8324 -3.2248). With initial value (2.5 4), the states of the Lure system with the state feedback controller are shown in Fig.2. And we can find that the closed-loop system is dichotomous.
Figure 1. The states of system Figure 2. The states of system without controller. with state feedback controller
Figure 3. The states of system with dynamic output feedback controller.
Conclusion
In this paper, the sufficient conditions guaranteeing dichotomy for uncertain Lure systems based the linear matrix inequalities are proposed. Then a state feedback controller and a dynamic output feedback controller are designed separately to guarantee the dichotomy of the uncertain Lure system such that there are no oscillations or chaotic. Finally a numerical example shows the effectiveness of the proposed method.
Acknowledgement
This work is supported by Notional Nature Science Foundation under Grant 61004012.
References
[1] Ponomarenko, D. V., Frequency-domain methods for nonlinear analysis, World Scientific, 1996. [2] Yang Y, Huang L, Lagrange Stability of a Class of Nonlinear Discrete-time Systems, Industrial Electronics and Applications, IEEE Conference, 2006:1-6.
[6] Xu S, Yang Y, Global behaviors of pendulum-like dynamical networks, Asian Control Conference, IEEE, 2009:594-599.
[7] Wang J Z, Huang L, and Duan Z S, Design of controller for a class of pendulum-like system guaranteeing dichotomy, Automatica, 40(6):1011-1016, 2004.
[8] Ao D, Geng Z, and Huang L, Robust Dichotomies of the LureSystem with Structured Uncertainties, Chinese Control Conference, 2006:802-805.
[9] Ao Dun, Zhiyong Geng, and Lin Huang, Design of controller for Lur’e systems guaranteeing dichotomy, Applied Mathematics Computation, 217(22):8927-8935, 2011.
[10] Jinzhi Wang, Zhisheng Duan, Lin Huang, Dichotomy property and Lagrange stability for uncertain pendulum-like feedback systems, Systems and control letters, 56(2):167-172, 2007. [11] LI, The Property of Dichotomy for a Class of Interconnected Pendulum-like Systems, Acta Automatica Sinica, 32(1):91-95, 2006.
[12] Duan Z, Wang J, Yang Y, and Huang, Frequency-domain and time-domain methods for feedback nonlinear systems and applications to chaos control, Chaos Solitons and Fractals, 40(2):848-861, 2009.
[13] Wang J Z, Duan Z S, and Huang L, Robust gradient-like property and controller design for uncertain pendulum-like systems, Journal of Dynamical and Control Systems, 12(2):229-246, 2006. [14] Yang Y, Huang L, Gradient-like behavior analysis and synthesis of uncertain pendulum-like systems, Proceeding of the American Control Conference Boston Massachusetts, in USA, 2004:5226-5231.
[15] Yang Y, Huang L, Feedback design for pendulum-like systems guaranteeing gradient-like behavior, IEEE International Symposium on Intelligent Control, 2004:287-292.
[16] Duan Z, Wang J, and Huang L, Multi-input and multi-output nonlinear systems: interconnected chua’s circuits, International Journal of Bifurcation and Chaos, 14(09):3065-3081, 2011.