2019 International Conference on Computation and Information Sciences (ICCIS 2019) ISBN: 978-1-60595-644-2
Research on the Application of Capacitive Fast
Gesture Recognition System
Jinliang Zhang and Jing Zhou
ABSTRACT
Gesture recognition, compared with the technology of machine vision and image processing, its algorithm is complicated, and the cost is relatively high. In this paper, a gesture recognition system based on the capacitive sensor was designed. The sensor plane of the system gesture data acquisition part was designed by capacitance-related principle. The collected data was subjected to the sliding average filtering processing and multiple training. The fuzzy partition simple template matching algorithm was adopted to quickly identify and recognize the collected specific gesture. Through practical experiments and tests, the total time of the system gesture recognition is less than 1 second, and the average recognition accuracy rate is 97.1%, which meets the system requirements of the real time and accuracy.
1. INTRODUCTION
With the rapid development of social economy and science technology, the interaction between people and machines is getting closer and closer, it has been an indispensable part of the people’s daily[1]. The development of human-computer interaction technology can be mainly divided into the following directions: (1) Traditional interaction methods based on mouse, keyboard and handle; (2) Smart sensor, wearable devices, and other physical interaction methods based on intelligent sensing technology; (3) Image processing interaction methods based on computer vision technology, such as face, gesture, fingerprint, iris etc. [2-3].
Currently, gesture recognition plays an important role in virtual reality, sign language recognition, medical research, intelligent robot, machine vision operation. It involves different technical methods and mathematical models. There are three main implementations: computer vision, ultrasound, and smart sensor-based [4]. The first one started very early, but the algorithm is complex, the dependence on the external environment is relatively large, such as illumination, background, temperature, visibility, etc. The second one is susceptible to signal frequency, the system performance will be significantly reduced in complex noisy environment. The third method is limited by the accuracy and sensitivity of the sensor, and the high-precision, multi-sensor solutions will greatly increase the size and cost of the system [5-6].
Based on the above problems, through gesture analysis, a single low-cost, low-power, high-resolution non-contact capacitive sensor is used to extract the gesture features, the fuzzy partition simple template matching algorithm is adopted to speed up the system recognition and enhance the accuracy. The gesture recognition device designed in this paper shows good performance during the tests. Under complex environment, it can realize accurate recognition of specific gestures.
2. SYSTEM DESIGN AND IMPLEMENTATION
2.1 Structure Design
Copper clad laminate 1 and 2 LCD(Results display)
40M oscillator
STM32 main data processing module
FDC2214 capacitive sensor module
Power supply module Numeric keypad
IIC communication External input
[image:3.612.130.463.87.153.2]External clock bluetooth
Figure 1. System structure diagram.
In addition,the system power supply module provides reliable and stable power for different voltage levels of the entire system, including three voltage levels of 12V, 5V and 3.3V which ensures the normal operation of the system.
2.2 Principle and Design of FDC2214 Sensor Module
The sensing plane is composed of CCL, and its composition with the sensor can be designed in two ways: bipolar plate differential form and unipolar plate form. Bipolar plate differential can improve the sensitivity of measurement, but it is easily affected by external noise and the overall stability of the system will be reduced. Relatively, the unipolar plate has simple structure, good stability, and large sensing range, which can meet the system performance requirements. Therefore, the system adopts a multi-channel measurement method with unipolar plate.
The schematic diagram of the system sensing plane design is shown in Fig.2 (a). Specifically, two CCLs are placed horizontally, and a layer of acrylic material is placed on the test area to realize non-contact detection. The two channels in the FDC2214 capacitive sensor module are used for data acquisition, which effectively save system resources and improve system operation efficiency. The No. 1 CCL is used to detect the posture of the finger, and the No. 2 CCL detects the posture of the palm. Through the test experiments of two-channel and six-channel schemes, the former resonance frequency variation range is relatively obvious, which simplify the data processing process.
1 2 Test area
Devices and dispaly
(a) (b)
Figure 2. (a) The sensing plane diagram and (b) the FDC2214 sensor module.
The designed sensor copper plates constitute the equivalent capacitance, ignoring the edge effect, according to the physical definition of the flat capacitor, it is given by
1 2S C
d
(1)
where 1 is the vacuum dielectric constant,2 is the relative dielectric constant between the plates, S is the coverage of the two plates and d is the distance between the parallel plates. The capacitance value will be changed with the area of the sensing plane, also affected by the distance between the gesture and the sensing plane. Therefore, it is possible to determine the physical change of capacitance value caused by a parameter change in the equation (1), 1 and 2 can be regarded as constant values, two plates are relatively fixed, so the distance d is also constant. Therefore, the analysis of the gesture simple features can be combined with the coverage area of the device, there are eight different gestures in the designed system, their effective area measurement are obviously different, so the gesture recognition can be realized.
The LC resonant circuit at the front end of the FDC2214 generates an oscillating signal of frequency f0, and uses the internal reference frequency fREFto measure the frequency of the oscillating signal of each channel. The FDC2214 data output is proportional to f0/fREF, and its digitized Data output can be expressed as
28 0*2
REF
f Data
f
(2)
According to f0, the value of the equivalent capacitance C0 can be obtained by
0
0 2 1
1
*(2 * )
C
f C
L
where C1 and L represent the parallel capacitance and inductance respectively. Refer to the technical manual, the recommended value is taken asC1=33pF,L18μH.
2.3 Gesture Recognition Algorithm Design
The commonly used algorithms for gesture recognition include multi-feature multi-model fusion, multi-objective optimization, neural network deep learning, hidden Markov model, etc. [7-8]. Most of these methods are based on image and machine vision. Although the recognition rate of the algorithm is high, it depends on the sample features and sizes, the algorithm is relatively complicated and time consuming. Based on the idea of probability and statistical system, a simple template matching algorithm based on fuzzy partition is adopted in this paper. The essence of the algorithm is similar to the K nearest neighbor (KNN) classification algorithm.
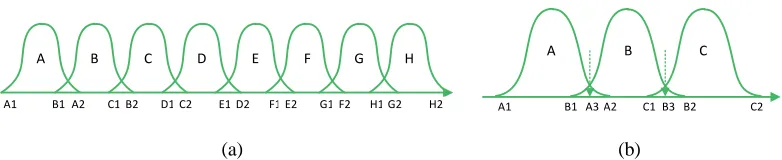
According to the analysis of system tasks and functional requirements, the system has been set two modes: training and decision, there are 8 different designed gestures: 3 guessing (rock, scissors and paper) and 5 numbers (1, 2, 3, 4, and 5). The rule based on the fuzzy partition is designed as follows, 8 different gesture data sets A, B, C, D, E, F, G, and H are obtained through experimental data measurement. According to the data statistical rule, the entire effective data is divided into 8 sub-intervals base on normal distribution, its diagram is shown in Fig.3 (a). The different sub-intervals have overlapping regions at end of the low probability distribution, which will cause logical conflicts during system implementation and execution. To solve this problem, the overlap region in Figure 5 is blurred and simplified, the intersection points of two adjacent regions are taken as the split boundary points. Taking adjacent sub-areas A, B, and C as an example, the principle of fuzzy simplified partitioning is shown in Fig.3 (b).
A1 B1A2 C1B2 D1C2 E1D2 F1E2 G1F2 H1G2 H2
A B C D E F G H
A1 B1 A3A2 C1B3 B2 C2
A B C
(a) (b)
Figure 3. (a) Probability distribution partition and (b) fuzzy partition based on probability distribution.
[image:5.612.105.496.485.565.2]In the algorithm, KNN uses the similarity theory to classify by voting in the neighborhood of statistical samples [9]. The sample data is classified using the Euclidean distances of the metric "data to be classified" and "samples of known categories". The input is the test data and the training sample data set, and the output is the category of the test data, and the prediction is performed by multiple voting. The system input training data set can be expressed as
1 1 2 2 1 2
{( , ),( , ),...,( , )}, n { , ,..., } t t tn n ti i K
T x y x y x y x R y, c c c (4)
Where y is the sample category, assuming xr is a test data instance, according to a given metric distance, the k samples which are closest data to xr need to be found in
T, and the xr neighborhood is denoted as Nk(xr). The Euclidean distance is calculated by
2 1
( , ) ( )
K
r t r t rm tm
m
D x x x x x x
(5)Where m is the m-th characteristic property between xr and xt. When the neighborhood Nk(xr) is found, according to the predetermined fuzzy partition rule, the classification y of the test data can be further determined, which can be expressed by
( )
arg max { }, ( 1, 2,..., ; , 2,..., )
ri k r
j i j
x N x
y c I y c i n j K
(6)Based on the above algorithm, the specific steps are as follows:
1) Perform multiple learning exercises on 8 different gestures, and fuzzy partition categories, then store the final stable sample data set T into the flash.
2) Collect test data, and process the acquisition gesture data by using a sliding average filter with a sliding window size of 10 ,the obtain stable test data xr.
3) According to the distance from xr to T in equation (5), obtain the sample neighborhood Nk(xr) of the test data.
4) Determine the gesture test data category according to the partition rule of equation (6) and step 1), thereby match the recognition result.
3. SYSTEM TESTING AND ANALYSIS
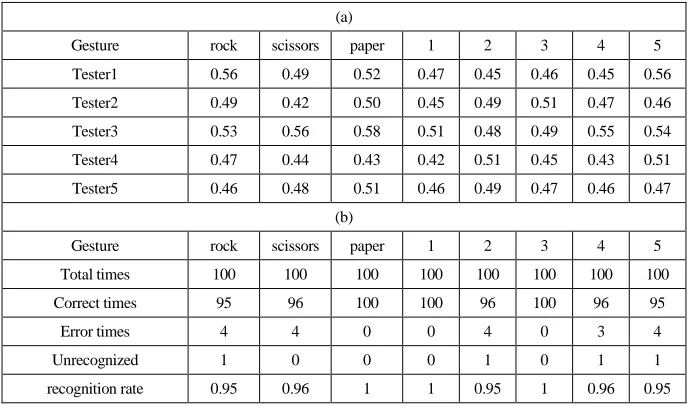
accuracy. Five people are randomly selected as testers who should perform the training on different gestures. When the training is completed, entering the decision mode, and the total time for recognition was recorded in Table. I (a). After that, select one of the testers to perform 100 tests for each gesture. The test statistics are shown in Table. I (b).
Figure 4. System physical diagram.
TABLE I. (a) TIME STATISTICS FOR EACH TEST RESULT AND (b) SYSTEM IDENTIFICATION RATE STATISTICS.
(a)
Gesture rock scissors paper 1 2 3 4 5
Tester1 0.56 0.49 0.52 0.47 0.45 0.46 0.45 0.56
Tester2 0.49 0.42 0.50 0.45 0.49 0.51 0.47 0.46
Tester3 0.53 0.56 0.58 0.51 0.48 0.49 0.55 0.54
Tester4 0.47 0.44 0.43 0.42 0.51 0.45 0.43 0.51
Tester5 0.46 0.48 0.51 0.46 0.49 0.47 0.46 0.47
(b)
Gesture rock scissors paper 1 2 3 4 5
Total times 100 100 100 100 100 100 100 100
Correct times 95 96 100 100 96 100 96 95
Error times 4 4 0 0 4 0 3 4
Unrecognized 1 0 0 0 1 0 1 1
recognition rate 0.95 0.96 1 1 0.95 1 0.96 0.95
[image:7.612.125.471.385.590.2]very high, which is up to 97.1%, the whole system shows good performance during the test.
4. CONCLUSIONS
The related techniques and methods of current gesture recognition system are studied. Based on the advantages and disadvantages of different technical methods, a FDC2214 capacitive sensor gesture recognition system is designed. The principle and hardware of the system data acquisition module are designed in detail. Through the analysis of eight specific gesture features, the fuzzy logic partitioning simple template matching algorithm is used to quickly identify the gesture information. Actualtest and multiple data statistics show that the system total time for different gesture information processing, classification, display is less than 1 s, the correct rate of recognition result is 97.1%, which meet the system real-time, accuracy and other performance requirements. In addition, the system uses only a single capacitive sensor, which not only simplifies the structure of the system, but also reduces the system cost.
ACKNOWLEDGEMENTS
This work is supported by the Scientific Research Program Guiding Project of Hubei Provincial Department of Education (B2017084) and the Guiding Scientific Research Project of Shiyan (19Y133).
REFERENCES
1. Cheng, H., L. Yang, Z.C. Liu.2015. “Survey on 3D Hand Gesture Recognition,” IEEE
Transactions on Circuits and Systems for Video Technology, 26 (9):1659-1673.
2. Zhang X.; X. Chen ; Y. Li ; V. Lantz ; K.Q. Wang ; J.H. Yang. 2011. “A Framework for Hand Gesture Recognition Based on Accelerometer and EMG Sensors,” IEEE Transactions on
Systems, Man, and Cybernetics - Part A: Systems and Humans, 41(6):1064–1076.
3. Jesus S., Robin R. Murphy. 2012. “Hand gesture recognition with depth images: A review,” the
21st IEEE International Symposium on Robot and Human Interactive Communication,
9:411-417.
4. Ibraheem N.A., R.Z. Khan. 2012. “Survey on Various Gesture Recognition Technologies and Techniques,” International Journal of Computer Applications, 50(7):38-44.
5. Lu W.; Z. Tong; J.H. Chu. 2016. “Dynamic Hand Gesture Recognition With Leap Motion Controller,” IEEE Signal Processing Letters, 23(9):1188–1192.
6. Eshed O.B., Mohan M.B. 2014. “Trivedi Hand Gesture Recognition in Real Time for Automotive Interfaces: A Multimodal Vision-Based Approach and Evaluations,” IEEE
Transactions on Intelligent Transportation Systems, 15(6):2368 – 2377.
8. Paweł P., Tomasz S., Michał N. 2016.“ Hand Body Language Gesture Recognition Based on Signals from Specialized Glove and Machine Learning Algorithms,” IEEE Transactions on
Industrial Informatics, 12(3):1104-1113.
9. Aryanie D.; Y. Heryadi. 2015. “American sign language-based finger-spelling recognition using k-Nearest Neighbors classifier,” 2015 3rd International Conference on Information and