ABSTRACT
BOSE, MRINAL KANTI. Non-Classical Damping Properties and Modal Correlation Coefficient for Dynamic Analysis of Structures. (Under the direction of Abhinav Gupta and Ajaya Gupta.)
The seismic response of secondary systems depends, in addition to their uncoupled dynamic characteristics, on the interaction with primary structures supporting them. This dissertation presents a verification study of the formulations to evaluate the seismic response of non-classically damped building-piping systems by modal synthesis approach. The existing studies consider only simple representative primary-secondary systems. No real-life like coupled system such as building-piping was used in these studies. Further, the majority of simple systems considered in these studies do not represent realistic coupled systems with significant effect of non-classical damping as they have either high values of mass ratios or systems with detuned modes.
In this dissertation, different configurations of simple representative systems as well as real-life like building-piping systems are considered. Responses obtained from modal superposition time history analyses as well as response spectrum analyses are compared with the corresponding responses obtained by Brookhaven National Laboratory from the direct integration time history analyses. Modal superposition time history analyses results and direct integration time history analyses results are almost identical. The mean and standard deviation of responses from response spectrum analyses are close to the corresponding values evaluated using direct integration time history analysis. In addition to the verification results, a detailed discussion is also presented on the significance of non-classical damping. It is shown that the effect of non-classical damping is significant in systems that have nearly tuned modes and sufficiently small values of modal mass ratios. It is also illustrated that composite modal damping is an alternate form of classical damping that can result in incorrect responses in non-classically damped systems. Possible reasons for numerical and modeling differences that can occur in real-life like building-piping system are identified and their effect on the dynamic characteristics of the coupled system is illustrated.
NON-CLASSICAL DAMPING PROPERTIES AND MODAL
CORRELATION COEFFICIENT FOR DYNAMIC ANALYSIS OF
STRUCTURES
by
MRINAL KANTI BOSE
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of Doctor of Philosophy
CIVIL ENGINEERING
Raleigh 2001
APPROVED BY:
BIOGRAPHY
Mrinal Kanti Bose received his Bachelor of Civil Engineering degree from Jadavpur
University, Calcutta, India, in 1990. He received his Master of Civil Engineering from
the same university in 1992. Then he worked in Bhabha Atomic Research Center, India
and his field of research was structural mechanics. He came to North Carolina State
University in 1996 for Ph.D. in Structural Engineering. During his study, he worked as
Research Assistant in the Center for Nuclear Power Plant Structures, Equipment and
Piping, at North Carolina State University.
His research interest includes structural dynamics, finite element analysis and
ACKNOWLEDGEMENTS
This research was partially supported by the Center for Nuclear Power Plant
Structures, Equipment and Piping at North Carolina State University. Resources for the
Center come from the dues paid by member organizations and from the Civil Engineering
Department and College of Engineering in the University.
The author wishes to express his appreciation to Dr. Abhinav Gupta and Dr.
Ajaya Gupta for their guidance throughout the course of this research. Appreciation is
TABLE OF CONTENTS
Page
LIST OF TABLES ……….. vi
LIST OF FIGURES ……….…... vii
PART I INTRODUCTION ……….. 1
Introduction ………. 2
Objective ………..……… 8
Organization ……….…….. 9
References ………. 11
PART II VERIFICATION OF METHODS FOR EVALUATING SEISMIC RESPONSE OF NON-CLASSICALLY DAMPED PRIMARY-SECONDARY SYSTEMS: SIMPLE COUPLED SYSTEMS ………… 13
Abstract ……… 14
Introduction ……….. 15
Coupled Equation of Motion ……… 18
Eigenvalue Problem ………. 20
Coupled System Response ……… 23
Time History Analysis ………. 24
Response Spectrum Analysis ……… 24
Damping Matrix of The Coupled System ……… 26
Description of Benchmark Problems: Simple Systems ………... 28
Validation Results: Simple Systems ……… 29
Significance of Non-Classical Damping ……….. 32
Conclusions ……….. 39
Acknowledgements ……….. 41
References ……….…... 42
PART III VERIFICATION OF METHODS FOR EVALUATING SEISMIC RESPONSE OF NON-CLASSICALLY DAMPED PRIMARY-SECONDARY SYSTEMS: BUILDING-PIPING SYSTEMS ……….… 51
Abstract ……… 52
Introduction ……….. 53
Coupled Problem ………... 55
Secondary System Residual Vectors ………... 56
Description of Building-Piping Systems ……….…..…. 60
Validation Results: Building-Piping Systems ……… 62
Conclusions ……… 66
Acknowledgements ………..……….. 68
References ………..… 69
PART IV A NEW METHOD TO EVALUATE CORRELATION COEFFICIENT FOR COMBINING MODAL RESPONSES ……… 84
Abstract ………... 85
Introduction ………. 86
Modal Superposition ……….. 87
Modal Correlation Coefficient ……….…….. 89
Limitations of the Existing Formulations ………... 92
Proposed Formulation ………. 94
Conclusions ……… 97
Acknowledgements ……… 99
References ………. 100
PART V SUMMARY AND CONCLUSIONS ……… 128
Summary and Conclusions ……… 129
Contributions to Industry Practice ……… 132
Recommendation for Future Work ……….. 132
References ……… 134
APPENDIX A.1 ……… 135
APPENDIX A.2 ……… 153
APPENDIX B.1 ……….. 171
APPENDIX B.2 ……… 187
LIST OF TABLES
Page
PART II VERIFICATION OF METHODS FOR EVALUATING SEISMIC
RESPONSE OF NON-CLASSICALLY DAMPED PRIMARY-SECONDARY SYSTEMS: SIMPLE COUPLED SYSTEMS
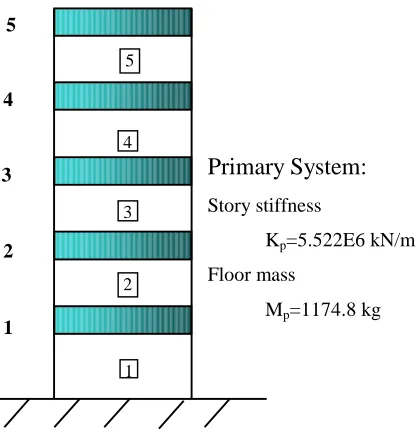
1. Values of Parameters for Various Load Cases of a Particular
Primary-Secondary Configuration ……… 44
PART III VERIFICATION OF METHODS FOR EVALUATING SEISMIC RESPONSE OF NON-CLASSICALLY DAMPED PRIMARY-SECONDARY SYSTEMS: SIMPLE COUPLED SYSTEMS 1. Frequencies and Damping Ratios for Uncoupled Systems ……… 70
2. Spring Forces (kN) in Secondary System ………. 70
3. Uncoupled Primary System Frequencies ……… 70
4a. Uncoupled Secondary System Frequencies, Case 1 ……….… 71
4b. Uncoupled Secondary System Frequencies, Case 2 ………...… 72
5. Coupled System Frequencies, Case 1 ………. 73
PART IV MODAL CORRELATION COEFFICIENT: A NEW PERSPECTIVE 1. Values of key frequencies f1d and fr for twelve earthquake records (Gupta et al. 1996) ……….……… 102
LIST OF FIGURES
Page
PART II VERIFICATION OF METHODS FOR EVALUATING SEISMIC
RESPONSE OF NON-CLASSICALLY DAMPED PRIMARY-SECONDARY SYSTEMS: SIMPLE COUPLED SYSTEMS
1. Primary System of Benchmark Problem 1,2 and 3 ………..….. 45
2. Secondary System of Benchmark Problem 1 ……….……. 45
3. Secondary System of Benchmark Problem 2 ………. 45
4. Secondary System of Benchmark Problem 3 ……… 45
5. Ratio of element forces from Response Spectrum and Time History analyses, Benchmark Problem 1 ……….. 46
6. Ratio of element forces from Response Spectrum and Time History analyses, Benchmark Problem 2 ………. 46
7. Ratio of element forces from Response Spectrum and Time History analyses, Benchmark Problem 3 ……….. 47
8. Variation of modal and total force in element number 8, Benchmark Problem 1 (Case m) ……… 47
9. SDOF Primary-SDOF Secondary, (2-DOF Coupled System) ………… 48
10. Force in element number 8, Benchmark Problem 1. (El Centro 1940 input) ……… 48
11. Leading diagonal term C11 of Classical Damping Matrix Ccl, 2-DOF coupled system ………..………. 49
12. Off diagonal term C12 of Classical Damping Matrix Ccl, 2-DOF coupled system…………..……….. 49
13. Trailing diagonal term C22 of Classical Damping Matrix Ccl, 2-DOF coupled system ………...……… 50
14. Element force in secondary oscillator, 2-DOF coupled system (El Centro 1940 input) ……… 50
PART III VERIFICATION OF METHODS FOR EVALUATING SEISMIC RESPONSE OF NON-CLASSICALLY DAMPED PRIMARY-SECONDARY SYSTEMS: BUILDING-PIPING SYSTEMS 1. 6-DOF Primary and 4-DOF Secondary System ………..…… 74
2. Building-Piping System ………...….. 75
3. Coupled system Modeshape ordinates in X-direction for 3rd mode, Case 1 ……… 76
5. Coupled system Modeshape ordinates in Z-direction for
3rd mode, Case 1……… 77 6. Nodal displacements in Y-direction for Case 1, El Centro 1940 ………. 77 7. Nodal displacements in X-direction for Case 2, El Centro 1940 ………. 78 8. Resultant moments in piping elements for Case 1, El Centro 1940 ….… 78 9. Resultant moments in piping elements for Case 2, El Centro 1940 …... 79 10. Axial forces in link elements for Case 1, El Centro 1940 ……… 79 11. Axial forces in link elements for Case 2, El Centro 1940 ………. 80 12. Nodal displacements in Y-direction from classical damping
for Cases a and b, El Centro 1940 ………. 80 13. Resultant moments in piping elements for classical damping
for Cases a and b, El Centro 1940 ………...….. 81 14. Nodal displacements in Y-direction for Case 1,
Direct Integration and Response Spectrum analyses………. 81 15. Nodal displacements in X-direction for Case 2,
Direct Integration and Response Spectrum analyses………. 82 16. Resultant moments in piping elements for Case 1,
Direct Integration and Response Spectrum analyses………. 82 17. Resultant moments in piping elements for Case 2,
Direct Integration and Response Spectrum analyses………..……… 83
PART IV A NEW METHOD TO EVALUATE CORRELATION
COEFFICIENT FOR COMBINING MODAL RESPONSES
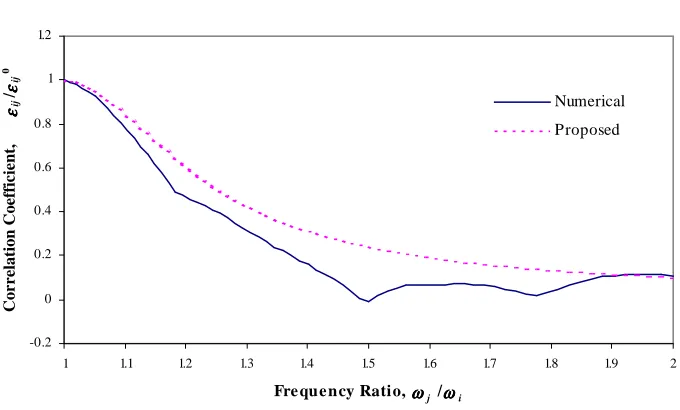
1. Comparison of numerically calculated eij values with those
obtained from existing formulations, ζi=0.01 and ζj=0.01 …………... 104 2. Comparison of numerically calculated eij values with those
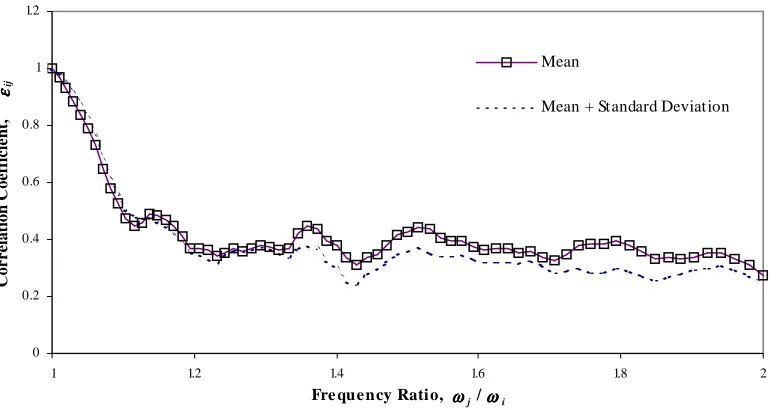
obtained from existing formulations, ζi=0.01 and ζj=0.07 ……….…... 104 3. Numerically calculated εij values using mean and mean plus one
standard deviation response in equation 15, ζi=0.01 and ζj=0.01 ….… 105 4. Numerically calculated εij values using mean and mean plus one
standard deviation response in equation 15, ζi=0.01 and ζj =0.07 .…... 105 5. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.01
and ζj =0.01 ……… 106
6. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.01
and ζj =0.02 ………. 106
7. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.01
and ζj =0.02 ……… 107
8. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.01
and ζj =0.07 ……….. 107
9. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.01
and ζj =0.10 ……… 108
10. εij/εij0 for modal responses with same algebraic sign, ζ
and ζj =0.2 ……….. 108 11. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.02
and ζj =0.05 ………. 109
12. εij/εij0
for modal responses with same algebraic sign, ζi =0.02
and ζj =0.07 ……… 109
13. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.02
and ζj =0.10 ……… 110
14. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.05
and ζj =0.05 ……… 110
15. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.05
and ζj =0.07 ………. 111
16. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.05
and ζj =0.10 ………. 111
17. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.07
and ζj =0.07 ……… 112
18. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.07
and ζj =0.10 ………. 112
19. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.10
and ζj =0.10 ……… 113
20. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.01
and ζj =0.01 ………. 113
21. εij/εij0 for modal responses with same algebraic sign, ζ
i =0.01
and ζj =0.07 ………. 114
22. εij/εij0
for modal responses with same algebraic sign, ζi =0.05
and ζj =0.07 ………. 114
23. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.01
and ζj =0.01 ………. 115
24. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.01
and ζj =0.02 ……… 115
25. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.01
and ζj =0.05 ………..….. 116
26. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.01
and ζj =0.07 ………..…….. 116
27. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.01
and ζj =0.10 ………..….. 117
28. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.02
and ζj =0.02 ………..………….. 117
29. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.02
and ζj =0.05 ………..……….. 118
30. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.02
31. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.02
and ζj =0.10 ……….. 119
32. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.05
and ζj =0.05 ……….. 119
33. εij/εij0
for modal responses with different algebraic sign, ζi =0.05
and ζj =0.07 ……….. 120
34. εij/εij0
for modal responses with different algebraic sign, ζi =0.05
and ζj =0.10 ……….. 120
35. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.07
and ζj =0.07 ……….. 121
36. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.07
and ζj =0.10 ……….. 121
37. εij/εij0 for modal responses with different algebraic sign, ζ
i =0.10
and ζj =0.10 ……….. 122
38. Correlation Coefficient εij0; ζ
i =0.01 ……….…….. 122
39. Correlation Coefficient εij0; ζ
i =0.02 ……… 123
40. Correlation Coefficient εij0; ζ
i =0.05 ………... 123
41. Correlation Coefficient εij0; ζ
i =0.07 ……… 124
42. Correlation Coefficient εij0; ζ
i =0.10 ……… 124
43. Correlation Coefficient εij0; ζ
i =0.01 ……… 125
44. Correlation Coefficient εij0; ζ
i =0.02 ………..…………. 125
45. Correlation Coefficient εij0; ζ
i =0.05 ………..…..……... 126
46. Correlation Coefficient εij0; ζ
i =0.07 ………..…..……… 126
47. Correlation Coefficient εij0
PART I
INTRODUCTION
INTRODUCTION
The seismic response of secondary systems depends, in addition to their uncoupled
dynamic characteristics, on the interaction with primary structures supporting them.
Considerable effort has been made in the past to develop procedures for evaluating
response of non-classically damped, coupled primary-secondary systems using their
uncoupled modal properties and design response spectra at the base of primary structure
directly. Responses obtained from such analyses are more accurate and often reduce the
conservatism in the design compared to a conventional analysis of uncoupled primary
and secondary systems. In general, the two uncoupled systems have different damping
characteristics, making the coupled system non-classically damped.
The non-classical nature of damping matrix makes the eigenvalues and
eigenvectors complex. Villavarde and Newmark (1980) developed a deterministic
formulation for non-classically damped systems starting with the complex frequencies
and mode shapes. They showed that the response for each complex mode shape and its
conjugate can be represented in two parts, one based on the relative displacement
spectrum and the other on the relative velocity spectrum. They assumed that the two
spectra are equivalent when expressed in the same units. This assumption does not hold
in the low and high frequency ranges. Also, they concentrated their efforts on secondary
systems, which are connected to the primary system at one or two points only.
Singh (1976) was among the first to present an alternative formulation based on
stochastic method. The method consists of developing a power spectral density function
system are used to obtain PSDF at any connecting degree of freedom (DOF), which in
turn would give the desired Instructure Response Spectra (IRS) at that DOF. However,
the process of generating an input response spectrum compatible PSDF is not unique. The
method also assumes that the ground motion is a stationary Gaussian process. This
assumption leads to overestimating the response in the low frequency range.
Der Kierighian et al. (1983) evaluated the response to a stochastic input. Unlike
Singh (1976), they modeled the earthquake as a white noise. The new method was an
improvement in that it accounted for interaction between the equipment and the structure,
and the correlation between the modes with closely spaced frequencies. However, other
problems inherent in the stochastic method remain. Igusa and Der Kieurighian (1985)
used the random vibration technique to develop an approximate method for the dynamic
analysis of multiply connected multi- degree-of-freedom secondary systems. This method
accounts for the interaction between primary and secondary systems, cross-correlation
between support motions, correlation between modal responses for stochastic input,
tuning between frequencies of the two systems, and the non-classical damping effect.
They also developed a modal combination rule for systems with non-classical damping
and closely spaced frequencies for stationary wide-band input. They used a perturbation
technique to derive closed form expressions for the complex modal properties of the
non-classically damped primary-secondary systems. However, their solution for the
eigenvalues and eigenvectors is correct only upto first order. Jaw and Gupta (1987) have
shown that the error in the eigenvalues and eigenvectors increases with the mass ratio
lightness of the secondary system in developing the approach. Singh and Suarez (1987)
proposed a different perturbation approach for evaluating eigenproperties of the
combined equipment-structure system. Through a rigorous analysis carried upto the
second order terms, the closed form expressions were derived for coupled frequencies,
mode shapes, and modal participation factors.
Gupta and Jaw (1986) developed an approximate method to obtain the coupled
frequencies, damping ratios, and mode shapes of the non-classically damped systems in
terms of the uncoupled modal properties of the classically damped primary and secondary
systems. They simplified the analysis by algebraically replacing the complex mode shape
by two real modal vectors. They also presented an alternate modal superposition method
for these real vectors. Gupta and Jaw (1986) further extended their formulation to the
response spectrum method. They also proposed a method for estimating the relative
velocity spectrum needed in the analysis.
Formulations proposed by Gupta and Jaw (1984) are based on the assumption that
the uncoupled modal properties of the primary and secondary systems are known for all
the modes. This is not practical for systems with large DOF. Gupta and Gupta (1999 a,b)
illustrated that a modal synthesis can give incorrect modal properties and seismic
response of non-classically damped coupled systems when all the modes of the
uncoupled primary and secondary are not included. They represented the effect of
missing mass contained in the truncated high frequency modes using residual modal
Gupta (1999) illustrated that the effect of non-classical damping is significant
when the uncoupled systems are tuned or nearly tuned and the modal mass ratios are
sufficiently small. He also illustrated that almost all the response in such systems comes
primarily from the response vectors associated with the relative velocity input and the
response vectors associated with the relative displacement input are negligible. Further,
Gupta and Gupta (1995) analyzed several real-life building-piping systems to show that
the coupled responses can be an order of magnitude less than the uncoupled responses
even when the modal mass ratios are extremely small. The method proposed by Gupta
(1992) and Gupta and Gupta (1998 a,b) is implemented in a computer program CREST
(1997), which is interfaced with the piping analysis program PIPESTRESS (1997) for
application to building-piping systems.
These computer programs have been validated by a comparison of the results
obtained from a modal time history analysis with those obtained from the corresponding
direct integration time history analysis. Similar comparison has also been made for the
results obtained from a response spectrum analysis. Other researchers have also
conducted similar verification studies (Der kieurighian 1983, Singh 1987). However, all
these studies use only simple representative systems and do not consider any real-life like
building-piping system. Further, the majority of simple systems considered in these
studies do not represent realistic coupled systems with significant effect of non-classical
damping as they have either high values of mass ratios or systems with detuned modes.
Recently, Brookhaven National Laboratory, under contract to US Nuclear Regulatory
various formulations for evaluating the seismic response of non-classically damped
coupled systems (USNRC 2000).
In the response spectrum method for evaluating the seismic response of structural
systems, the maximum modal responses are combined using an approximate formulation
for the modal correlation coefficient. A summary of various methods for combining
modal responses is given by Gupta (1992).
Rosenbleuth and Elorduy (1969) have given an expression for the correlation
coefficient by approximating the earthquake ground motion as a finite segment of white
noise and the modal response as completely damped periodic. Based on random vibration
theory, Der Kieurighian (1981) developed expressions for modal correlation coefficients
by considering earthquake excitations to be stationary white noise of infinite duration.
Under the assumption of stationarity for the response, Singh and Chu (1976) and Singh
and Mehta (1983) have presented the equations for superposition of modal responses in
response spectrum method, from which it is possible to write an equivalent expression for
the modal correlation coefficient.
In general, it has been found that the formulations based on the assumption of
stationarity underestimate the correlation coefficient. Many attempts have been made to
avoid this assumption. Rosenbleuth and Elorduy (1969) have approximated the
non-stationary transient nature of the response due to finite duration of the input earthquake
excitation by including a term representing the strong motion duration of the input. Gupta
and Cordero (1981) suggested modifications to the expression proposed by Rosenbleuth
Later, Gupta (1984) proposed another method for deriving the expression for
combination of modal responses in non-classically damped systems. The modal response
in non-classically damped system consists of two parts, one corresponding to the relative
displacement input and the other to the relative velocity input. Therefore, Gupta (1992)
proposed three different correlation coefficients, one for modal responses corresponding
to the relative displacement input, another for those corresponding to the relative velocity
input, and a third for cross correlation between the two types of modal responses. Similar
expressions have been proposed by Igusa and Der Kieurighian (1985). An important
observation made by Gupta (1992) is that total response in a particular mode is damped
periodic only in low frequency regions. The contribution of rigid part increases gradually
with increasing value of frequency and the response becomes completely rigid beyond
the rigid frequency of input motion. Gupta et al. (1996) presented a formulation to
separate the damped periodic and rigid parts of a modal response using rigid response
coefficient. Similar expressions for rigid-response coefficient have been proposed by
Lindely and Yow (1980). However, their study is heuristic in nature and gives incorrect
values in the low frequency region (below the peak of input spectrum). Recently,
USNRC (1999) conducted a benchmarking study to compare and evaluate the validity of
various methods.
Consideration of only the maximum modal responses in a response spectrum
method makes it a design method which cannot reproduce the results obtained from a
time history analysis on a one-to-one basis. Instead, the results from the two methods
the mean and the standard deviation of responses obtained from multiple time history
analyses should be close to the corresponding values obtained from the response
spectrum method. As pointed out in Gupta (1992), a time history analysis should be
preferred over a response spectrum analysis if the input time history of the ground motion
is known. However, this is not the case in design, as the input time histories for future
earthquakes are not known a-priori. For design purposes, earthquake input is defined as a
response spectrum corresponding to a specified level of non-exceedence probability. The
non-exceedence probability ranges from 0.50 for ordinary structures to 0.84 for critical
industrial facilities such as nuclear power plants. Such a definition of input design
response spectrum ensures that the modal responses have the same non-exceedence
probability as that of the design spectrum. However, the total response obtained after
combining individual modal responses may not necessarily correspond to the same
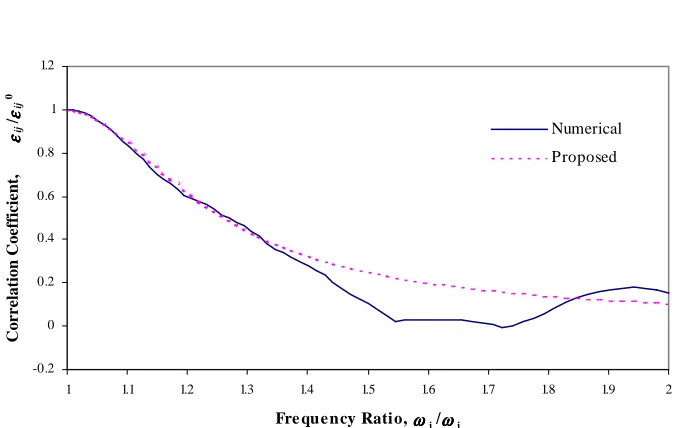
non-exceedence probability. In this paper, a numerical study is presented to illustrate that the
modal correlation coefficients evaluated using the existing formulations can be
significantly less than those needed for evaluating design response corresponding to a
specified level of non-exceedence probability.
OBJECTIVE
The specific tasks required to achieve the objective of this study are:
• Modify computer program CREST/PIPETSRESS to create a new program
CREST-TH which performs a time-wise modal superposition analysis of simple as well as
• Coordinate with Brookhaven National Laboratory (BNL) to develop several simple
but realistic coupled systems for validation of CREST and CREST-TH, study the
effects of mass interaction, tuning of modes, non-classical damping, multiple support
excitation, and high frequency modes using these systems.
• Consider two real-life building-piping systems and perform modal superposition time
history analyses for each simple and real-life like coupled system. Compare the
responses with those evaluated by BNL from a direct integration time history
analysis.
• Study differences in non-classical and composite modal damping.
• Evaluate responses using response spectrum analysis for each system. Compare the
responses with those evaluated from time history analysis.
• Study methods for combining modal responses.
• Develop new formulations for modal correlation coefficients that are consistent with
the evaluation of design response in a response spectrum method.
ORGANIZATION
This dissertation consists of primarily three manuscripts that the authors plan to submit
for publication in the peer-reviewed journals. Part I of the dissertation provides an
introduction and detailed discussion on the existing literature for evaluating seismic
response of non-classically damped primary-secondary systems as well as for evaluating
modal correlation coefficients. The first and second manuscripts, Parts II and III of the
validation of the formulations for evaluating the seismic response of nonclassically
damped coupled systems. An extensive discussion is presented on the results obtained
from modal superposition time history analyses as well as the response spectrum analyses
of simple and real-life like building-piping systems. Part II also provides a detailed
discussion on the significance of non-classical damping in primary-secondary systems
and on the differences between the non-classical, classical, and composite modal
damping. In part III, a detailed discussion is provided on the numerical and modeling
differences that can occur in real-life like building-piping systems. Effect of these
inaccuracies on the dynamic characteristics of the coupled system is also illustrated.
The manuscript given in Part IV of this dissertation provides a discussion on the
existing formulations for modal correlation coefficients and the limitations of these
formulations in the evaluation of design response corresponding to a specified level of
non-exceedence probability. A numerical study is presented to illustrate that the modal
correlation coefficient evaluated using the existing formulations can be significantly less
than those needed for evaluating the design response. An empirical study is used to
propose a new definition for the modal correlation coefficient that is consistent with the
evaluation of design response in response spectrum method. Finally, the summary and
conclusions of this study and the recommendations for future studies are presented in Part
REFERENCES
Der Kieurighian, A. (1981). “A Response Spectrum Method for Random Vibration Analysis of MDOF Systems”, Earthquake Engineering and Structural Dynamics, Vol. 9, pp. 419-435.
Der Kieurighian, A.,Sackman, J. L. and Nour-Omid, B. (1983) “Dynamic Analysis of Light Equipment in Structures: Response to Stochastic Input”, Journal of
Engineering Mechnics, ASCE, Vol. 109, pp. 90-95.
DST (1997), DST/PIPESTRESS User’s Manual. DST Computers Services of Geneva, Switzerland, Version 3.4.09.
Gupta, A. (1999), “Significance of Nonclassical Damping in Coupled System Analysis”, Proceedings, 15th Structural Mechanics in Reactor Technology Conference, 1/K4-A8, Seoul.
Gupta, A. K. (1992), Response Spectrum Method in Seismic Analysis and Design of Structures, CRC Press.
Gupta, A. K., Hassan, T. and Gupta, A. (1996). “Correlation Coefficients for Modal Response Combination of Non-classically Damped Systems”, Nuclear Engineering and Design, Vol. 165, pp. 67-80.
Gupta, A. and Bose, M. K. (1997). CREST, A Computer Program for Coupled
Response Spectrum Analysis of Secondary Systems Interfaced with PIPESTRESS, User’s Manual, Report C-NPP-SEP 9/95, Department of Civil Engineering, NC State University, Raleigh, North Carolina.
Gupta, A. and Gupta, A. K. (1998a). “Missing Mass Effect in Coupled Analysis I: Complex Modal Properties”, Journal of Structural Engineering, ASCE, Vol. 124,
pp. 490-495.
Gupta, A. and Gupta, A. K. (1998b). “Missing Mass Effect in Coupled Analysis II: Residual Response”, Journal of Structural Engineering, ASCE, Vol. 124,
pp. 496-500.
Gupta, A. and Gupta, A. K. (1995). “Applications of New Developments in Coupled Seismic Analysis of Piping systems”, 13th Structural Mechanics in Reactor Technology Conference, K7/3, Stuttgart.
Gupta, A. K. and Jaw, J. W. (1986). “Coupled Response Spectrum Analysis of Secondary Systems Using Uncoupled Modal Properties”, Nuclear Engineering and Design, Vol. 92, pp. 61-68.
Igusa, T. and Der Kieurighian, A. (1985).”Dynamic Response of Multiply Supported secondary Systems”, Journal of Engineering Mechanics, ASCE, Vol. 111, pp. 20-41.
Jaw, J. W. and Gupta, A. K. (1987) “Seismic Response of Multiply Connected MDOF Secondary Systems”, Department of Civil Engineering., NC State University.
Lindley, D.W. and Yow, J. R. (1980). “Modal Response summation for Seismic Qualification”, 2nd ASCE Speciality Conference on Civil Engineering and Nuclear
Power, Vol. VI, Paper 8-2, Knoxville, TN.
Rosenbleuth, E. and Elorduy, J. (1969). “Response of Linear Systems to Certain Transient Disturbances”, Proceedings, 4th World Conference on Earthquake Engineering. A-1, pp. 185-196.
Singh, M. P. and Chu, S. L. (1976). “Stochastic Considerations in Seismic Analysis of Structures”, Earthquake Engineering and Structural Dynamics, Vol. 4, pp. 295-307.
Singh, M. P. and Chu, S. L. (1976). “Stochastic Considerations in Seismic Analysis of Structures”, Earthquake Engineering and Structural Dynamics, Vol. 4, pp. 295-307.
Singh, M. P. and Mehta, K. B. (1983). “Seismic Design Response by an Alternative SRSS Rule”, Earthquake Engineering and Structural Dynamics, Vol. 11, pp. 771- 183.
Singh, M. P. and Suarez, L. E. (1987). “Perturbed Coupled Eigenproperties of Non- Classically Damped Primary Structure and Equipment Systems.” Journal of Sound and Vibration, Vol. 116, pp. 199-220.
Villavarde, R. and Newmark, N. M. (1980). “Seismic Response of Light Attachments to Buildings”, Structural Research Series, No. 469, University of Illinois, Urbana.
USNRC (1999). “Reevaluation of Regulatory Guidance on Modal Response
Combination Methods for Seismic Response Spectrum Analysis”, NUREG/CR-6645, US Nuclear Regulatory Commission/Brookhaven National Laboratory, Eds. Morante, R. and Wang, Y..
USNRC (2000). “Benchmark Program for the Evaluation of Methods to
PART II
VERIFICATION OF METHODS FOR EVALUATING
SEISMIC RESPONSE OF NON-CLASSICALLY DAMPED
PRIMARY-SECONDARY SYSTEMS:
SIMPLE COUPLED SYSTEMS
VERIFICATION OF METHODS FOR EVALUATING SEISMIC
RESPONSE OF NON-CLASSICALLY DAMPED
PRIMARY-SECONDARY SYSTEMS:
SIMPLE COUPLED SYSTEMS
Abhinav Gupta, Mrinal K. Bose, Ajaya K. Gupta
Center for Nuclear Power Plant Structures, Equipment and Piping, North Carolina State University Campus Box 7908, Raleigh, NC 27695-7908, USA
ABSTRACT: Results from a verification study of formulations for evaluating the
seismic response of non-classically damped primary-secondary systems are presented. A
parametric study is concluded in which three different configurations of simple
representative systems are considered. Responses obtained from modal superposition
time history analyses as well as response spectrum analyses are compared with the
corresponding responses obtained by Brookhaven National Laboratory from the direct
integration time history analyses. Modal superposition time history analyses results and
direct integration time history analyses results are almost identical. The mean and
standard deviation of responses from response spectrum analyses are close to the
corresponding values evaluated using direct integration time history analyses. It has been
combination of modal tuning, modal mass ratio and the difference in the modal damping
ratios. In addition to the verification results, a detailed discussion is also presented on the
significance of non-classical damping. It is shown that the effect of non-classical
damping is significant in systems that have nearly tuned modes and sufficiently small
values of modal mass ratios. It is also illustrated that composite modal damping is an
alternate form of classical damping that can give incorrect responses in non-classically
damped systems
INTRODUCTION
The current practice of calculating seismic response is to perform the analysis of primary
system (buildings) and secondary systems (equipment and piping) separately. The
seismic response of secondary systems depends, in addition to their uncoupled dynamic
characteristics, on the interaction with the primary structures supporting them. Seismic
analysis of a coupled primary-secondary system gives responses that are more accurate
and are often less than those calculated from an uncoupled analysis (Gupta 1992). Unlike
the conventional uncoupled analysis, a coupled system analysis accounts for the effects
of mass interaction, tuning between the modes of the uncoupled systems, non-classical
damping, and correlation between inputs at various supports of a multiply supported
piping system. Considerable effort has been made in the past to evaluate the response of
non-classically damped coupled primary-secondary systems using their uncoupled modal
(Burdisso and Singh 1987; Igusa and Der Kieurighian 1985; Gupta and Gupta 1998;
Villavarde and Newmark 1980).
Almost all the existing formulations have been verified by a comparison of the
results obtained from a modal superposition time history analysis of the coupled system
with the corresponding results obtained from a direct integration of the equation of
motion. However, these verification studies considered only simple representative
primary-secondary systems. No real-life-like coupled system such as building-piping was
used in these studies. Recently, Brookhaven National Laboratory (BNL) conducted a
benchmark program for the US Nuclear Regulatory Commission to evaluate and verify
the various methods of calculating seismic response in non-classically damped coupled
primary-secondary systems (USNRC 2000). A parametric study was conducted and a
total of 62 cases were considered. Three different configurations of simple systems and
one configuration of real-life-like building-piping system were considered to generate
these test cases by varying key parameters including the floor mass ratio. Not only were
the results obtained from modal superposition time history analyses compared with the
results obtained from a direct integration of the equation of motion, the results obtained
from the corresponding response spectrum analyses were also considered for verification
purposes.
As stated earlier, a coupled system analysis can account for the effect of
non-classical damping. The coupled system becomes non-non-classically damped when the
damping characteristics of the uncoupled primary and secondary systems are different.
to the complex eigenvectors and eigenvalues can be represented using two real vectors,
one corresponding to the relative displacement input and the other to the relative velocity
input (Gupta 1992). The response corresponding to the relative velocity input exists only
when the coupled system is non-classically damped and is null when it is classically
damped. Gupta (1999) has shown that the effect of non-classical damping is significant
only when the two uncoupled systems are tuned or nearly tuned and the modal mass
ratios are sufficiently small. Typical values for the modal mass ratios in actual
building-piping systems have been found to be on the order of 0.0001 or lower. Even though the
various existing formulations account for this effect, the simple systems used in the
verification studies are not representative of the systems that have significant effect of
non-classical damping due to the following reasons. The simple systems considered for
verification purposes in the earlier studies have either relatively higher values of mass
ratios or systems with detuned modes. Consequently, these simple systems do not
represent coupled systems that have significant effect of non-classical damping.
In the study conducted by BNL, an attempt was also made to compare the results
obtained by considering the non-classical nature of the damping matrix to those obtained
by using composite modal damping for the coupled system (Bose and Gupta 2000).
However, the results obtained from the two types of damping models were compared
only for the response spectrum method of analysis. Results corresponding to a time
history analysis with composite modal damping, either by modal superposition or by
direct integration, were not considered. Based on the results obtained from response
damping characteristics give close results. Even though large differences in the results
obtained from the two methods of modeling damping characteristics were noticed for
real-life like building-piping systems, these differences were attributed to the differences
in stiffness characteristics of the building-piping models between the two sets of
analyses.
In the present paper, a discussion of the results obtained from our participation in
the benchmark program conducted by BNL is provided and two additional independent
topics encountered but not completely addressed in the validation study conducted by
BNL are discussed. First, differences between non-classical, classical and composite
modal damping are studied by comparison of time history analysis results in simple
systems. Next, possible reasons for numerical and modeling differences in real-life like
building-piping system considered in the benchmark program are identified and their
effect on the dynamic characteristics of the coupled system is illustrated. The latter is
given in a companion paper (Bose et al. 2001).
COUPLED EQUATION OF MOTION
The equation of motion for an N-DOF coupled primary-secondary system can be written
as
g
u
CU KU MUb
U
M ++++ ++++ ====−−−− (1)
where, M, C, and K are the mass, damping and stiffness matrices, respectively of the
coupled system; U is the displacement vector relative to the fixed base; Ub is the static
unit displacement in the direction of the earthquake, and ug is the ground acceleration. These matrices and vectors can be expressed in terms of the matrices and vectors of the
primary and secondary systems, denoted by subscripts p and s, respectively.
þþþþ ýýýý üüüü îîîî íííí ìììì ==== þþþþ ýýýý üüüü îîîî íííí ìììì ==== úúúú úúúú ûûûû ùùùù êêêê êêêê ëëëë éééé ++++ ==== úúúú úúúú ûûûû ùùùù êêêê êêêê ëëëë éééé ++++ ==== úúúú ûûûû ùùùù êêêê ëëëë éééé ==== bs bp b s p s sp ps s p p s sp ps s p p s p U U U ; U U U ; K K K K K K C C C C C C ; M O O M M (2)
The matrices Kspand Csp are the stiffness and the damping contributions of the secondary
system with respect to the primary system's connecting degrees of freedom. In the above
equation, the displacement vector is expressed relative to the fixed base of the primary
system. Gupta and Gupta (1998a) presented a transformation in which the secondary
system DOF are expressed relative to the primary system connecting DOF. The new set
of DOF for the coupled system, U , can be evaluated as
U T U U I U O I U U U s p sp s p = þ ý ü î í ì ú û ù ê ë é = þ ý ü î í ì
= (3)
where, Up ≡≡≡≡Up, and the matrix Usp contains secondary system displacement vectors
each of which represents the static deformation shape of the secondary system when the
primary system degrees of freedom undergo a unit displacement. Only those vectors that
correspond to the primary system connecting DOF contain non-zero values. Substituting
Eq. (3) into Eq. (1) and pre-multiplying by T T, the transformed equation of motion is
given by
g
bu
CU KU MU
U
EIGENVALUE PROBLEM
The equation of motion for the coupled system can be transformed further using the mode
shapes of the uncoupled primary and secondary systems (Gupta and Gupta 1998a; Igusa
and Der Kiureghian 1983; Gupta and Jaw 1986). It is assumed that the uncoupled
primary and the uncoupled secondary systems are classically damped. Therefore, the
damping matrices Cp and Csare diagonalized when they are pre- and post-multiplied by
the respective undamped modal matrices. Such systems are called classically damped.
However, when the modal damping ratios of the two systems are unequal, the combined
damping matrix C would be no longer diagonal when pre- and post-multiplied by the
undamped modal matrix of the coupled system. The combined system, therefore,
becomes non-classically damped. Let subscript i and other lower case letters denote the
primary system modes and the subscript α and other Greek letters denote the secondary
system modes. Let the ith mode shape of the uncoupled primary system be φφφφpi and the αth
mode shape of the uncoupled secondary system be φφφφsα such that φφφφTpiMpφφφφpi ====1 and
1
====
sα
s T sαM φφφφ
φφφφ . In terms of the uncoupled mode shapes we can write
þþþþ ýýýý üüüü îîîî íííí ìììì úúúú ûûûû ùùùù êêêê ëëëë éééé ==== ==== s p s p X X Φ 0 0 Φ X Φ
U (5)
Substituting Eq. (5) in Eq. (4) and premultiplying by ΦT , we get
g T u b U M X K~ X C~ X
M~ ++++ ++++ ==== −−−−ΦΦΦΦ (6)
The various matrices and vectors in the above equation can be written in terms of
ú ú û ù ê ê ë é + = ú ú û ù ê ê ë é = ú ú û ù ê ê ë é + = s s p p s p s sp ps s p p K O O K K K C O O C C M M M M M M ~ ~ ~ ~ ; ~ ~ ~ ; ~ ~ ~ ~ ~ ~ (7a) þ ý ü î í ì ú û ù ê ë é − = þ ý ü î í ì = = − bs bp sp bs bp b b U U I U O I U U U T U 1 (7b)
When the base of primary system undergoes a unit deflection in the direction of
earthquake, no relative displacement exists between the two uncoupled systems, giving
0
====
bs
U . Further, we can express the various matrices in the above equations as
M~p ++++M~ps ====I++++ΦpTUspT MsUspΦp (8a)
M~ps ==== M~spT ====ΦTpUTspMsΦs (8b)
Ms=I
~
(8c) C~p ====ΦTpCpΦp (8d)
C~s ====ΦTs CsΦs (8e)
K~p++++K~ps ====ΦTp KpΦp++++ΦTp
((((
Ksp−−−−UspT KsUsp))))
Φp (8f) K~s ====ΦTs KsΦs (8g) The elements of matrices M~p, C~p, and K~pcan be defined asM~ij ==== 1 ++++ φTpi UspT Ms Usp φpi , i ==== j (9a)
==== φφφφpiT UspT Ms Usp φφφφpj , i ≠≠≠≠ j (9b)
j i
ζ ω
j i ≠≠≠≠
====0, (9d)
K~ij ==== ω2pi ++++ ∆ωpij2 , i ==== j (9e)
==== ∆ω2pij, i ≠≠≠≠ j (9f)
∆ωpij2 ==== φφφφTpi
((((
Kps −−−− UspT Ks Usp))))
φφφφpj (9g)where, ∆ω2pijrepresents the effect of static constraint offered by the secondary system on the primary system. The corresponding term in the transformed damping matrix is
neglected. Matrix M~ps has elements that can be defined as
M~iα = φpiTUspT Msφsα =ri1α/2 (10)
in which riα is the modal mass ratio that represents the ratio of secondary system mass
participating in the αth uncoupled mode to the primary system mass participating in its
own ith uncoupled mode. It is a parameter that describes the interaction between the modes of two uncoupled systems. For a SDOF primary and SDOF secondary system, its
value is equal to the ratio of secondary to primary system mass. The various elements of
matrices M~s, C~s, and K~scan be written as
β α αβ ==== , ==== ~
1
M (11a)
β α ≠≠≠≠
==== 0, (11b)
β α ζ
ω α α
αβ ==== 2 , ====
C s s
~
(11c)
β α ≠≠≠≠
==== 0, (11d)
β α ω α
αβ ==== s2 , ====
β α ≠≠≠≠
==== 0, (11f) If the eigenvalues of the coupled system are denoted by λ, the free vibration equation of
motion corresponding to Eq. (6) becomes
K*X ====O; K* ====K~++++λC~++++λ2M~ (12)
For non-classically damped systems, the eigenvalue problem given by the above equation
gives complex eigenvalues and eigenvectors together with their conjugates.
COUPLED SYSTEM RESPONSE
The complex eigenvalue in the ith coupled mode λi and its conjugate λi give the coupled
modal frequency ωi and the damping ratio ζi. Each complex eigenvector and its conjugate
gives two real modal vectors, Ψid and Ψiv, (Gupta and Gupta 1998b)
((((
λiFi i))))
Re((((
Fi i))))
Re Ψ , Ψ Ψ
Ψ v
i d
i ==== −−−−2 ==== −−−−2 (13a)
Ψi====ΦXi (13b)
in which,
==== XiT Γ , ΓT ====
[[[[
ΓpT ΓsT]]]]
ii
a
F 1 (14a)
ai = 2λi XiT M~ X~i + XiT C~ Xi (14b) ΓpT =
[
γp1 γp2 . . .]
, ΓsT =[
γs1 γs2 . . .]
(14c)spT s bs sαT s bs
T p bp p T
p M U φ U M U φ M U
φ + =
= j j sα
pj γ
where φpjand φ sα are mass normalized mode shapes of the uncoupled primary and
secondary system in the jth and αth modes, respectively.
TIME HISTORY ANALYSIS
For an acceleration time history input, the coupled response can be calculated either by
direct integration of the coupled system equation of motion i.e. Eq. (1). Alternatively, a
modal superposition may be used as follows
i i N i N i N i z z v i d i v i d i
i U U Ψ Ψ
U
U =
å
=å
− =å
−= =
=1 1 1
(15)
in which zi is the relative displacement and zi the relative velocity of an equivalent SDOF system and can be calculated from
g i 2 i i i i
i ωζ z ω z u
z ++++ 2 ++++ ==== −−−− (16)
RESPONSE SPECTRUM ANALYSIS
For design purposes, earthquake input is defined in terms of a response spectrum and not
an acceleration time history. In response spectrum method of analysis, the modal
responses are calculated as
v Di i d
Di ω S
S v i v i d i d
i Ψ ; U Ψ
U ==== ==== (17) where, SDid and SDiv are the spectral displacements in coupled mode i. Superscripts d and v
denote that the spectral values correspond to the relative displacement and the relative
velocity spectra, respectively. Conventionally, the response spectrum is defined as that
velocity is not calculated and therefore, not available. A method to evaluate spectrum
curve corresponding to the relative velocity from the relative displacement spectrum is
given in Gupta et al. (1996). However, if the earthquake time history is known, both the
spectrum curves can be calculated directly by integrating Eq. (16). In this study, the
earthquake inputs are defined in terms of acceleration time histories. Therefore, both
spectra are evaluated directly from the time history at exact frequency and damping ratio
values for each mode. The modal responses in the response spectrum method are then
combined according to the method proposed by Gupta et al. (1996).
((((
))))
å
å
å
å å
====å
å
å
==== ++++ −−−− ==== N i N j v j v i ij v j v i v ij d j d i dijR R ε R R 2µ R R
ε
R
1 1
2 (18)
in which R represents a response quantity of interest and
d j d i d ij d j d i d
ij α α ε α α
ε = {[1− ( )2][1−( )2]} + (19a)
v j v i v ij v j v i v
ij α α ε α α
ε = {[1−( )2][1−( )2]} +
(19b) ij v j d i
ij α α µ
µ = {[1−( )2][1− ( )2]} (19c)
where, εijd ,εijv and µij are the modal correlation coefficients whereas αidand αivare the
rigid response coefficients. These coefficients are described in detail in Gupta et al.
(1996). However, it should be noted that 0≤αid,v ≤1. Gupta et al. (1996) illustrate that
in the low frequency region (fi less than a key frequency f1d) the response is completely
frequency fr) the response is completely rigid, i.e. αid,v =1. For modes that have
frequencies in the intermediate frequency region ( f1d ≤ fi ≤ fr), both the periodic and the rigid parts contribute significantly to the response. Values of f1dand fr for various
input ground motions are evaluated in Gupta et al. (1996).
DAMPING MATRIX OF THE COUPLED SYSTEM
As stated earlier, it is assumed that the uncoupled secondary system is classically
damped, i.e.
[
]
sT s s
s
ω
diag( 2 αζ α) = Φ CsΦ (20)
in which ωsα and ζsα are the circular frequency and modal damping ratio, respectively, in
the αth uncoupled secondary system mode. The secondary system damping matrix
relative to its own fixed base, Cs, can be calculated using the undamped modal matrix ΦΦΦΦs
and the mass matrix Ms of the uncoupled secondary system.
[
]
1) 2
( −
−
= T s s s
s diag ω Φ
Φ
Cs αζ α (21)
Since ΦsTMsΦs = I , we can write
s
sΦ Φ Φ M
M
Φs−T = s s−1 = sT
; (22)
Therefore,
[
]
sT s s
s
s M Φ Φ M
For developing the damping matrix of the coupled system, we need to express the
secondary system damping matrix relative to the fixed base of primary system and not its
own fixed base. This can be done by using the transformation developed earlier.
U Q U T U ==== −−−−1 ====
ú ú û ù ê ê ë é − − = = s sp s T sp sp s T sp s T t s C U C C U U C U Q C Q C
s (24)
The transformed matrix Cst is of order (NT × NT) where NT is the total number of DOF
for the coupled system (equal to the primary system DOF plus the secondary system
DOF). The primary system damping matrix Cp relative to its own base, can now be
assembled with matrix Cst to obtain the total damping matrix of the non-classically
damped coupled system. The primary system damping matrix Cp can be evaluated using
the same procedure as for the secondary system, i.e.
[[[[
]]]]
pT p p
p
p M Φ ( ) Φ M
C ==== diag 2ωpi Spi (25)
in which ωpi and ζpi are the circular frequency and modal damping ratio of the ith
uncoupled primary system mode. Damping matrix of the coupled system can now be
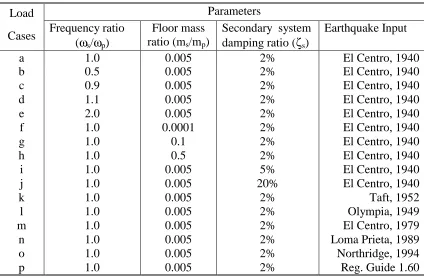
DESCRIPTION OF BENCHMARK PROBLEMS: SIMPLE SYSTEMS
Three different configurations of simple non-classically damped primary-secondary
systems, shown in Figs. 1-4, were considered for performing a parametric validation
study in USNRC (2000). All the values given in this figures and the present paper have
been converted from US customary units to SI standard units. The primary system in all
the three configurations is a five degree-of-freedom shear building with uniform
distribution of story stiffness and floor mass. The first configuration is representative of a
simple equipment modeled as a four-degree-of-freedom secondary system that is
supported on the 4th floor of the primary system. The second configuration represents a six degrees of freedom piping system supported at multiple primary system floors i.e.
2nd,3rd and 4th floors. The third configuration consists of a six-degree-of-freedom
secondary system that is not only supported at multiple primary system floors i.e. 3rd and 4th, but also directly on the ground. The parametric study was conducted by a variation in four different quantities: (1) secondary system floor mass, (2) secondary system story
stiffness, (3) secondary system damping ratio, and (4) input ground motions. These four
quantities were considered to study the effects of variation in modal mass ratio, tuning
between the modes of two uncoupled systems, non-classcial damping, and characteristics
of input motion, respectively. A total of fourteen cases were considered for each coupled
system configuration that included four cases for mass ratio variations, five for frequency
ratio variations, three for damping ratio variations, and seven for different input ground
motions. Table 1 describes the characteristics for each of these fourteen cases. The