Location Oriented Directional MAC Protocol for
FANETs using ABC Algorithm
Er. Poonam Attri
M.Tech (ECE), BCET, GSP E mail: [email protected]Mr. Parveen Kumar
Associate Professor (ECE), BCET,GSPE mail: [email protected]
Abstract – In FANET, LODMAC protocol is used which
have many advantages over another protocol. Flying Ad Hoc Networks called as FANETs lies among the most arising technologies of space wireless networks for both military and civilian. The main objective of our work is designing and implementing of LODMAC protocol for FANETs when node failures are presented in network. Thus existing techniques has neglected the effect of node failures in FANETs. So in concern to handle this issue a new technique has proposed which has utilised detection and replacement of node failure in FANETs to enhance the results further. The overall results indicates that the proposed technique outperforms over the other techniques.
Keywords – MANET, FANET, FAILURE,
LOADMAC.
I. I
NTRODUCTIONThe latest form of MANET is FANET where the UAVs are the nodes. FANET cannot be formed by single-UAV systems, but only valid for multiple UAV systems. All of the multiple UAV systems cannot be formed into a FANET. Ad-hoc network should be created between UAVs communication to create FANET. Thus, between UAVs the communication fully depends on UAV connection to infrastructure , it may not be categorised as a FANET [1]. As active technological changes on electronics, sensor and communication technologies, unmanned aerial vehicle (UAV) systems are possible to produce, which may fly individually or may be remotely operated without having any human personnel. Due to this versatile and flexible nature ,it is easy to install and have relatively low operating expenses, UAVs are widely used in both military as well as commoner applications, like as searching and vanish operations [1], supervision by military intelligence at borders [2], wildfire managing [3], relay in ad hoc networks, predicting of wind [6], disaster detection [7], sensing of remote located objects[8] and traffic monitoring [9]. In place of establishing and operating one big sized UAV, use of a few small sized UAVs grouped in one unit have many benefits. Though, multiple-UAV systems have many unique design problems and communication is the major design problems .An advance network family which has ad hoc network between UAVs is called as The Flying Ad-Hoc Network named as FANET. The differences are defined among Mobile Ad-hoc Network called MANETs, Vehicle Adhoc Networks called as VANETs and FANETs ,there and many important problems in FANET design which are raised up.
Among the progress of micro- electromechanical systems and embedded systems, it is possible to built up
small UAVs . Though, the capacity of a one small sized UAV is lower. A system can be created with coordination and collusion of multiple UAVs which is far beyond the capability of single UAV. The following are the advantages of the multiple-UAV systems :
Cost: cost of maintenance and the accession of small sized UAVs is very less than that of a large sized UAV [10]. Scalability: maximum usage of large sized UAV facilitate a lesser portion of coverage area [11].
Survivability: The mission cannot be proceeded if the UAV is failed in a job which is having only one UAV. However, the operation can sustain with the other UAVs if a UAV is off or stop working in a system having multiple number of UAVs.
Speed-up: The completion of goals is speeded up with using a multiple number of UAVs [12].
Small cross-section of radar: Multiple UAV systems produce small cross-section of radar as compared with radar of single UAV system, which is critical for military applications [13]. However, using multiple UAV systems the measurability of an operation can be extended easily.
Fig. 1.1. A FANET scenery of multi-UAV systems
one UAV to another UAV is established. There are many design problems lying within infrastructure. First of all, to communicate with a satellite station or a base station , each UAV must have an expensive and complicated hardware. Communication accuracy is another shortcoming of this network structure. Communication links may not be maintained between UAVs due to versatile environmental conditions, movement of node and land territory layouts,. Another problem between the UAVs and the base station is the range restriction. If UAV is outside the range of coverage area of base ground station it gets disconnected . FANET in which ad hoc network is been established between different UAVs is other possible communication solution for multiple UAV systems. Whereas a subgroup of UAVs creates communication with the satellite station and ground base station , all the UAVs are part of this ad hoc network. The UAVs can create communication with each other and the ground base station in this way. A special type of VANET and MANET is called as FANET. Although, the previously existing ad hoc networks and FANET are different: FANETs have much higher degree of mobility when compared with that of VANET or MANET nodes. While typical VANET and MANET adhoc network nodes is seen as vehicle and walking human respectively, nodes of FANET flies over the sky. FANET topology of nodes is more frequently changed rather than the topology of network in a MANETs or VANETs depending on the FANET nodes mobility. The aim of our this existing ad hoc networks is to create point-to- point connection. FANETs require point-to-point connection for co-ordination and collusion of UAVs. When required, in wireless sensor networks data is collected anywhere from the environment and signal is sent to the command control centre, [15]. As a result, FANET must have point-to-point communication connection and concenter the cast traffic at the same time. Relative distance in between nodes of FANET is much greater than that of VANETs and MANETs [16]. The communication range must be larger, than in MANETs and VANETs in purpose to built communication links between UAVs. This process affects the radio communication connections, hardware circuitry and behavior of physical layer . Multiple-UAV systems have many unique types of sensors, and also each sensor requires a unique data delivery techniques .
There are many areas where FANET related researches are studied under different title names. Like, aerial robot [12], aerial sensor network [13]–[15], but exact FANET base study is less interest in these topics. UAV ad hoc network [16] is totally a unique topic, closely associated to FANET topology. There is no more difference between the existing topology of UAV ad-hoc network theories and the above definition of FANET. Although , FANET states, it is a specialized type of VANET topology which is further a form of MANET. This is why it is called Flying Ad-Hoc Network, named as FANET. Other traditional ad-hoc networks vs FANET .: Wireless ad hoc network is categorised permitting to their application, positioning, communication and assignment intentions. By description, FANETs are advance form of MANETs, and having many similar design thoughts . FANET system can
also be classified as a subgroup of VANET system, which is further a subgroup of MANET system.
Fig. 1.2. MANET, VANET and FANET
This affiliation is shown in Fig. 1.2. FANET have same characteristics as of these networks, they also has some unique design problems.
II. LODMAC P
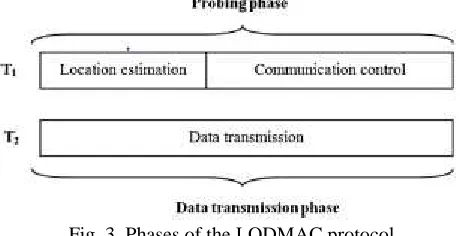
ROTOCOLThe LODMAC provides a efficient way to use transmission of data through directional antennas and also a better method to determine and distribute the exact locations of the neighboring nodes in every GPS to update sequence of interval. The LODMAC uses two transceivers simultaneously along with two parallel phases. named as, the probing phase and the data transmission phase . The probing phase is further divided into two slots sequentially which are the location estimation slot and the communication control slot. One of the two transceivers, named T1 which is assigned for the probing phase and the T2 transceiver is assigned for data transmission phase in LODMAC. The probing phase lasts for 1 second exactly which in turn is equal to the global GPS interval and in this phase, UAV nodes distribute its location information to the neighboring nodes and exchange communication control packets.
Fig. 3. Phases of the LODMAC protocol
The advantages and originalities of the LODMAC are summarized as follows:
1. Eliminate the asymmetry in range: In LODMAC, all three of the location packets, control packets and data packets are directionally transferred . Hence, it eliminate the problem of asymmetry in gain .
2. Enhancement in communication range: With the usage of directional antenna , there is increase in transfer range which also results in decreased hop counts and average network delays.
answer to a sender so that it conducts a transmission and will not be free for an particular amount of time.
4. Eliminate the problem of head of line blocking: In LODMAC protocol, two transceivers are used and all antennas used are employed with independent queues. The directional neighbor database (DND) detects a node to be busy and a busy beam which also provide valuable information to eliminate the problem of head of line blocking .
5. 3D flight scenarios: Far from other theories ,nodes in the FANET protocol fly over the 3D space. The proposed protocol LODMAC characteristics are coded and adjusted for deployment in 3D scenarios.
III. R
ELATEDW
ORKSamil Temel et al. [1] Flying Ad Hoc Network named as FANET is a novel mobile ad hoc network where the communication nodes are called as Unmanned Aerial Vehicles (UAVs). FANETs guarantee many new ways for both civilian and military applications. Now a days, traditional omni directional antennas are deployed on UAV nodes which result in reduced spatial reuse and limited amount of network capacity. Alternatively, with deploying directional antennas the capacity can be significantly increased, along with increased spatial reuse and communication range of FANETs. Addition to which, being aware of the exact locations of the neighboring nodes in FANETs is critical specially for directional adhoc multi-UAV scenarios. Hasan Tareque et al. [2] The use of Unmanned Aerial Vehicles (UAVs) is day by day increasing. In recent years, UAVs are being used in many of civil applications, such as policing, fire- fighting, etc in addition to military applications. Instead of using one large UAV, now a days multiple UAVs are used for higher coverage area and accuracy. Therefore, networking models is essential to allow two or more UAV nodes to communicate directly or via relay node(s). Flying Ad-Hoc Networks (FANETs) are designed which is basically an ad hoc network for UAVs. This is relatively a new up growing technology in network family to meet requirements of traditional networking model, such as Mobile Ad-hoc Networks and Vehicular Ad-hoc Networks. In this paper, Flying Ad-Hoc Networks are reviewed along considering its challenges in comparison to traditional ad hoc networks. The FANETs existing routing protocols are summed into six major categories which are analyzed and compared critically based on various performance criteria. In choosing appropriate routing protocols based on the specific scenario, our comparative analysis will help network engineers to find out where the FANET will be deployed.
Krishan Yadav et al. [3] As a result of many technological changes in electronic, communication and computer technology, it is possible to built UAV systems. These systems can fly autonomously and are able to operate without any human personnel. In recent years, the capability and roles of Unmanned Aerial Vehicles(UAV) have enlarged and its use in all around the world is popular as a result of advancement in technology. The main focus is to change the usage of one UAV on to the
impossible. Thus we tend to propose interconnecting hang and paragliders wirelessly to make a Flying Ad-Hoc Network (FANET). This network permits pilots to gather and exchange live air flow information which is based on measured vertical climbing rates. Furthermore, we will show however this technology can profit in Search and Rescue (SAR) missions . In this paper we tend to prove the usefulness of our approach by conducting several world experiments using custom built affordable low-cost hardware. Rajneet Kaur et al. [11] Failure in Wireless Sensor Networks is due to deploying of sensor nodes in harsh or hostile surroundings with having restricted power backup. Node failures could also degrade the efficiency of sensor networks. Thus, failure detection and recovery techniques are vital for effective performance of nodes in Wireless Sensor Networks. In this paper we have presented a much better DRFN technique in which we have improved its failover mechanism. The failure handling scheme will be improved by the use of Artificial Bee Colony (ABC) based optimization technique. Swathi Ravindran et al. [12] Wireless Sensor Networks (WSNs) are used in many real world applications in recent times. WSNs have many portable sensor nodes. Due to the advance in technology of the microelectronic fabrication portable sensor nodes are manufactured at low cost. So many of sensor nodes are involved in WSNs to improve the Quality Of Service (QOS). On integrating many sensor nodes in a network the probability of increasing in sensor node failure which further will degrade the Quality Of Service. Kafsi M et al. [13] Vehicular Ad Hoc Networks (VANETs) are a special category of mobile ad hoc networks that can raise a several of technical challenges, in point of view of their mobility models. In this paper, we offer a thorough analysis of the connectivity of such networks by taking maximum advantage on well known results of percolation theory.
Wang X et al. [14] Due to the speedily changing topology of Vehicular Ad Hoc network (VANET), the routing protocol is needed which can be able to find out more stable routes comparatively. However the prevailing routing protocols are not seem to be considering the distinguishing features of vehicles and roadway , and this brings about challenges to those routing protocols applicability in VANET. Yan et al. [15] proposed a way to select a stable routing paths in a vehicular network environment. An optimal path (less-cost, less-delay and more-stability) is considered on the basis of stability preference,. Their algorithms not only consider the efficiency of path searching but also the stability balance, delay, and cost metrics to find out the optimal routing path. Wang-Hei Ho et al. [16] Vehicular Ad-Hoc Networks (VANETs) are attracting considerable research and commercial interest with promising applications in several areas as well as cooperative vehicle-highways systems, sensor networks and safety systems. Although, due to high speed and everchanging driver behaviour, automotive ad-hoc networks will behave in essentially different ways to the most common models in Mobile Ad-Hoc Network (MANET) research. Work done previously in MANETs typically assumes that the mobile nodes have random movement with an
unconstrained mobility model and it is clearly believed that a random mobility model is not sufficient to represent the major characteristics of real-world vehicle motions, and therefore way to unreliable results. Recent studies of VANETs have tried to introduce macro- and micro-mobility constraints to model the motion vehicle motions, however their focus is on modeling the mobility of general private vehicles. The potential given for the co-ordinated deployment of network nodes on centrally-managed group of vehicles, it has become necessary to model the characteristics of a VANET that includes vehicles of different types, having different types of behavioural patterns. In this paper, we review the connectivity of mobile ad-hoc networks which consist of buses moving in urban area, and examine the implications for transport-related services. Buses have a different set of behavioral characteristics, such as fixed routes, schedules, bus stops, specific priorities, etc., which gives rise to clear impact on the connectivity of nodes in the communication network.
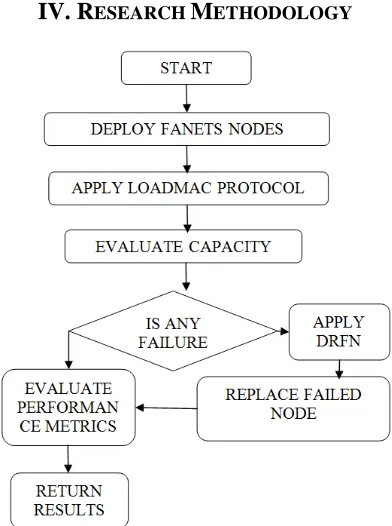
IV. R
ESEARCHM
ETHODOLOGYFig. 4.1. Flow chart of proposed methodology
V. E
XPERIMENTALS
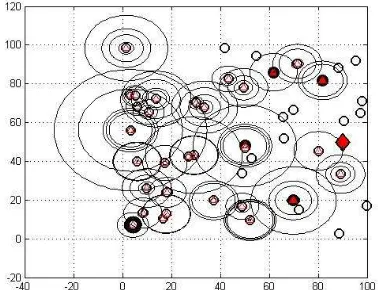
ETUPFig. 5.1. Existing algorithm Results when n= 10
Fig. 5.2. Existing algorithm Results when n= 10
This figure 5.3 shows the results for number of nodes = 50 in the existing algorithm. This figure 5.4 shows the results for number of nodes = 50 in the proposed algorithm.
Fig. 5.3. Existing algorithm Results when n = 50
Fig. 5.4. Proposed algorithm Results when n = 50
This figure 5.3 shows the results for number of nodes = 100 in the existing algorithm. This figure 5.4 shows the results for number of nodes = 100 in the proposed algorithm.
Fig. 5.5. Existing algorithm Results when n = 100
Fig. 5.6. Existing algorithm Results when n = 100
5.2 Performance Evaluation
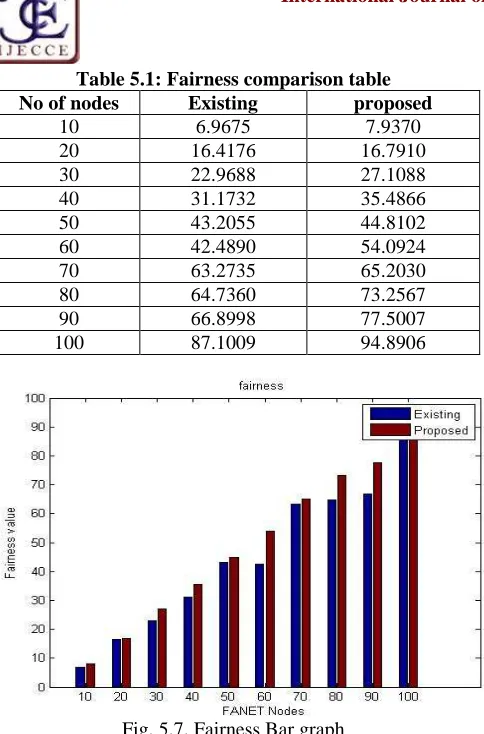
Table 5.1: Fairness comparison table No of nodes Existing proposed
10 6.9675 7.9370
20 16.4176 16.7910
30 22.9688 27.1088
40 31.1732 35.4866
50 43.2055 44.8102
60 42.4890 54.0924
70 63.2735 65.2030
80 64.7360 73.2567
90 66.8998 77.5007
100 87.1009 94.8906
Fig. 5.7. Fairness Bar graph
This figure 5.5 shows the bar graph of the fairness which depicts the output results of the existing as well as the proposed algorithm. This graph proves that the proposed results are much better than the existing results. The values of Delay are shown below in the comparison Table 5.2. This comparison table shows the output values of existing as well as the proposed algorithm. The values of the proposed algorithm are lower than the existing algorithm.
Table 5.2: Delay comparison table No.of nodes Existing Proposed
10 0.0034 0.0026
20 0.0052 0.0045
30 0.0070 0.0056
40 0.0086 0.0078
50 0.0102 0.0094
60 0.0126 0.0108
70 0.0130 0.0126
80 0.0159 0.0140
90 0.0185 0.0166
100 0.0197 0.0180
Fig. 5.8. Delay Bar graph
This figure 5.6 shows the bar graph of the delay which depicts the output results of the existing as well as the proposed algorithm. This graph proves that the proposed results are much better than the existing results.
C
ONCLUSION ANDF
UTUREW
ORKFANET is defined as “Flying Ad Hoc Network”. FANET is a mobile ad hoc network type where the UAVs are communicating nodes. UAVs are defined as unmanned aerial vehicles, which are also called as remotely piloted aircraft (RPA). It is an aircraft without a human pilot aboard. In FANET, more than one or many UAVs are used. Many problems occurs when Wifi equipments developed for MANET usage are used in FANETS such as : Transmission delay, Degraded security, Less transmission range and application demands may be delay-tolerated where human life is concerned(in extremely harmful event). In FANET, LODMAC protocol is used which have many advantages over another protocol. Flying Ad Hoc Networks (FANETs) are some of the most arising technologies for both military and civilian near space wireless networks. The overall objective of this work is to design and also implement LODMAC protocol for FANETs when node failures are presented in network. Thus existing techniques has neglected the effect of node failures in FANETs. So in order to handle this issue a new technique is proposed which has utilised detection and replacement of node failure in FANETs to enhance the results further. The overall results indicates that the proposed technique outperforms over the other techniques. In near future we will use various kind of failures and failover technique to improve the quality of FANET's protocols further.
R
EFERENCES[1] Temel, Samil, and Ilker Bekmezci. "LODMAC: Location oriented directional MAC protocol for FANETs." Computer Networks 83 (2015): 76-84.
[2] Hasan Tareque, Md, Md Shohrab Hossain, and Mohammed Atiquzzaman. "On the routing in Flying Ad Hoc Networks." Computer Science and Information Systems (FedCSIS), 2015 Federated Conference on. IEEE, 2015.
Innovative Trends in Computer Science Engineering (ITCSE-2015), 4th April 2015.
[4] Qingwen, Wang, Liu Gang, Li Zhi, and Qi Qian. 2015. “An Adaptive Forwarding Protocol for Three Dimensional Flying Ad Hoc Networks.” 5th International Conference on Electronics Information and Emergency Communication (ICEIEC), 2015, no. 2013: 142–45. doi:10.1109/ICEIEC.2015.7284506. [5] Kanta Kumari, Basant Sah and Sunil Maakar “A Survey:
Different Mobility Model for FANET” International Journal of Advanced Research in Computer Science and Software Engineering, Volume 5, Issue 6, June 2015.
[6] Rosati, Stefano, Karol Kruzelecki, and Gregoire Heitz, Dario ´ Floreano"Dynamic Routing for Flying Ad Hoc Networks."IEEE (2014).
[7] Sahingoz, Ozgur Koray. "Networking models in flying Ad-hoc networks (FANETs): Concepts and challenges." Journal of Intelligent & Robotic Systems 74.1-2 (2014): 513-527. [8] Vasiliev, Danil S., Daniil S. Meitis, and Albert Abilov.
"Simulation-based comparison of AODV, OLSR and HWMP protocols for flying Ad Hoc networks." Internet of Things, Smart Spaces, and Next Generation Networks and Systems. Springer International Publishing, 2014. 245-252.
[9] Bekmezci, Ilker, Ozgur Koray Sahingoz, and Şamil Temel. "Flying ad-hoc networks (FANETs): A survey." Ad Hoc Networks 11.3 (2013): 1254-1270.
[10] J. Eckert, D. Eckhoft and R. German, "Flying Ad-Hoc Network communication for detecting thermals: Feasibility and insights," Innovative Computing Technology (INTECH), 2013 Third International Conference on, London, 2013, pp. 333-338. [11] Rajneet Kaur and Shaveta Angurala “Improving Displacement
Number and Overheads of DRFN using Artificial Bee Colony Technique in WSNs” International Journal of Computer Applications (0975 – 8887) Volume 131 – No.7, December2015.
[12] Swathi Ravindran, Bindu Sebastian and Jerrin Yomas “An Improved Method for Sensor Node Failure Detection in Wireless Sensor Networks”, IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 5, Ver. II (Sep - Oct .2015), PP 65-70.
[13] Kafsi M., Papadimitratos P., Dousse O., Alpcan T., and Hubaux J., “VANET Connectivity Analysis”, arXiv on Nokia Research Center, Lausanne, Switzerland,2009.
[14] Wang X., Yang Y., and An J., "Multi-Metric Routing Decisions in VANET." IEEE Eighth International Conference on Dependable Autonomic and Secure Computing, pp. 551-556, 2009.
[15] Yan, Gongjun, Danda B. Rawat, and Samy El-Tawab. "Ticket-based reliable routing in vanet." In Mobile Adhoc and Sensor Systems, 2009. MASS'09. IEEE 6th International Conference on, pp. 609-614. IEEE, 2009.