Genetic Algorithm based PID controller for
Frequency Regulation Ancillary services
Sandeep Bhongade#1, Prof. H.O. Gupta#2Member IEEE, Dr. Barjeev Tyagi#3 #Electrical Engineering Department,
Indian Institute of Technology, Roorkee, India
Abstract- In this paper, the parameters of Proportional, Integral and Derivative (PID) controller for Automatic
Generation Control (AGC) suitable in restructured power system is tuned according to Generic Algorithms (GAs) based performance indices. The key idea of the proposed method is to use the fitness function based on Area Control Error (ACE). The functioning of the proposed Genetic Algorithm based PID (GAPID) controller has been demonstrated on a 75-bus Indian power system network and the results have been compared with those obtained by using Least Square Minimization method.
Key words— Deregulated market, Genetic Algorithms, Automatic Generation Control, Area control error.
1. INTRODUCTION
Automatic Generation Control (AGC) in power systems is very important in order to supply reliable electric power with good quality. With time, the operating point of a power system changes and hence, system may experience deviations in nominal system frequency and Scheduled power exchanges to other areas, which may yield undesirable effects. There are two variables of interest, namely, frequency and tie-line power exchanges. Their variations are weighted together by a linear combination to a single variable called the area control error (ACE). Automatic generation control (AGC) plays a significant role in the power system by maintaining scheduled system frequency and tie line flow during normal operating condition and also during small perturbations. Many investigations in the area of isolated and interconnected power systems have been reported in the past. The concept of conventional AGC is discussed in [1], [2] & [3].
Around the world, the electric power industry has been undergoing reforms from the traditional regulated, vertically integrated utility into a competitive, deregulated market. Market deregulation has caused significant changes not only in the generation sector, but also in the power transmission and distribution sectors and has introduced new challenges for market participants. A detailed discussion on Load Frequency Control issues in power system operation after deregulation is reported in reference [4].
In Automatic Generation Control (AGC) PID controller is widely used to control the frequency and tie-line power. Many researchers have proposed different methods to tune the PID controller; one of them is the least square minimization method. Least squares (LS) problems are those in which the objective function may be expressed as a sum of squares. Such problems have a natural relationship to distances in Euclidean geometry, and the solutions may be computed analytically using the tools of linear algebra. An optimal value of PID controller using Least Square Minimization problem for the plant whose order is higher than the order of plant has been proposed in [5] based on the optimal control theory.
In this work, a GAPID controller has been developed for multi area AGC scheme. Since, the optimal parameter values of the classical AGC have been obtained in the literature by minimizing the popular integral of the squared error criterion (ISE) only, an effort has been made in this study to show that this criterion does not give always the best system performance especially in a deregulated environment. Therefore, a genetically tuned PID controller has been proposed in this work. In this work, integral of the square of the area control error (ISACE) have been utilized to select the fitness function for genetic algorithm. The population size 50 has been chosen for genetic algorithm to obtain the optimal values of PID controller. Proposed GAPID Algorithm has been tested on 75- Indian power system. A deregulated electricity market scenario has been assumed in the 75- bus system, which has been divided into four control areas. The effect of generator rate constraint (GRC) has also been considered in the multi area AGC model. The performance studies have been carried out by using the MATLAB SIMULINK for transactions within and across the control area boundaries.
2. SYSTEMMODELLING
The system operator is an entity entrusted with the responsibility of ensuring the reliability and security of the power system. It is an independent entity and does not participate in the electricity trading. In order to maintain the system security and reliability, the SO procures various services, such as supply of emergency reserves, frequency regulation and reactive power from the other entities in the system. These services are known as the ‘ancillary services’. In frequency regulation ancillary services, many transactions take place such as Poolco, bilateral and mixed. Frequency regulation market is an hourly ahead market.
In Poolco based transaction, the Discos and Gencos of the same area participate in the frequency regulation through system operator. System operator (SO) accepts bids (volume and price) from power producers (Gencos) who are willing to quickly (with in about 10-15 minutes) increase or decrease their level of production. Consumers (Discos) also can submit bids to SO for increasing or decreasing their level of consumption. When regulation is needed, the SO activates the most favorable bid. The Gencos share the load according to their participation factor (pf) in frequency regulation market. Genco participation can be determined by utilizing the bids submitted by the Gencos [6]. In bilateral transaction, Gencos and Discos negotiate bilateral contracts among each other and submit their contractual agreements to a system operator (SO). The players are responsible for having a communication path to exchange contract data as well as measurements to do load following in real-time. In such an arrangement, a Genco sends a pulse to a governor to follow the predicted load as long as it does not exceed the contracted value. The responsibility of the Disco is to monitor its load continuously and ensure the loads following requirements are met according to the contractual agreement. A Disco can control its load by using demand side management techniques (DSM).In order to meet the bilateral transactions; Disco Participation Matrix (DPM) [7] has been used. In case of Poolco transition tie-line power
between two areas is settled at zero value. But in case of bilateral transition between different areas the tie-line power is not settled at zero value but settled according to the bilateral contract between Gencos of one area and Discos of other area. Rest of the load will be met by the poolco transaction.
3. CALCULATION OF AREA CONTROL ERROR (ACE)
In a practical multi area power system, a control area is interconnected to its neighboring areas with tie lines, all forming part of the overall power pool. If
P
ij is the tie line real power flow from an area-i to another area- j and m is the total number of areas, the net tie line power flow from area-i will beIn a conventional AGC formulation, is generally maintained at a fixed value. However, in a deregulated electricity market, a Disco may have contracts with the Gencos in the same area as well as with the Gencos in other areas, too. Hence, the scheduled tie-line power of any area may change as the demand of the Disco changes. Thus, the net scheduled steady-state power flow on the tie line from an area- i can be expressed as
∆ ∆
(1) Where,∆ is the change in the scheduled tie-line power due to change in the demand, Dij is the demand of Discos in area-j from Gencos in area-i , and Dji is the demand of Discos in area- i from Gencos in area-j.
Generally, ∆ 0,(Conventioanl AGC).During the transient period, at any given time, the tie-line power error is given as:
∆ ∆ ∆
(2) This error signal can be used to generate the Area Control Error (ACE) signal as:
B ∆ +∆ (3) Where, Bi is the frequency bias factor and ∆fi is the frequency deviation in area-i.
4. GENERATIONRATECONSTRAINT(GRC)
t Pg
Smax
Smin
S
Fig. 1 Saturation non-linearity
A Saturation nonlinearity is shown in fig.2 is considered for Generation Rate Constraint (GRC). Smax is the
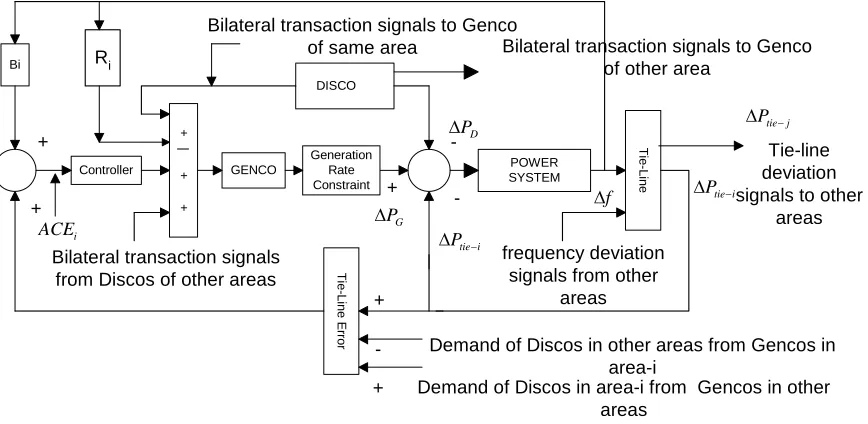
maximum capacity of the generating plant. S is the slope representing the rate of change of generator output. The overall block diagram of AGC scheme for area-I is shown in Fig.2.
Controller GENCO SYSTEMPOWER
Ti
e
-Line
Ti
e-Line Er
ror
DISCO Bi
+
|
+
+
Bilateral transaction signals to Genco
of same area Bilateral transaction signals to Genco of other area
D
P
i tie
P
frequency deviation signals from other
areas
Tie-line deviation signals to other
areas Bilateral transaction signals
from Discos of other areas
Demand of Discos in other areas from Gencos in area-i
Demand of Discos in area-i from Gencos in other areas
Ri
f
i
ACE
+
+
+
-Generation Rate Constraint
+
-+
j tie
P
i tie
P
G
P
Fig. 2. AGC block diagram of area-i
5. PIDCONTROLLERTUNINGUSINGGENETICALGORITHM(GA)
The form of a PID controller can be expressed as the sum of three terms, proportional, integral, and derivative control. The transfer function of such a PID controller can be expressed as:
s,
Optimal values of , ,, , can be determined by many ways, one of them, is suggested by the Donde et al [7].
Author in this papers utilized Least Square Minimization method. Result obtained by Least Square Minimization method is not globally minimum. Therefore, a Genetic Algorithm based minimization approach to determine the values of , ,, , has been developed in this work.
Genetic algorithms (GA), a way to search randomly for the best answers to tough problems were first introduced by Holland (1975) [9]. Over the past years, it is becoming important to solve a wide range of search, optimization and machine learning problems. GA’s are search algorithms based on the mechanism of natural selection and natural genetics. They can be considered as a general purpose optimization method and have been successfully applied to search and optimization [10].The fitness function for PID-tuning is integral of the square of the area control error (ISACE) have been utilized to select the fitness function for Genetic Algorithm (GA). By considering m-areas in a system, equation (4) represent the ISACE criterion as follows,
(4)
Subjected to
, , , ,
, , , ,
, , ,
Steps involved determining the optimal parameters of the controller using genetic algorithm are given below.
I.Start : Create random population of n chromosomes
II. Fitness : Evaluate fitness of each chromos in the population
III. New population:
a. Selection : Based on fitness function
b. Recombination : Cross-over chromosomes
c. Mutation : Mutate chromosomes
d. Acceptation : reject or accept new one
IV. Replace : old with new population and the new generation
V. Test : Test for problem criterion
VI. Loop : Continue step II-V until criterion is satisfied.
Genetic algorithm parameters are taken as given below The number of population = 50
The number of generation = 100 The probability of crossover is 0.8 The mutation function taken is Gaussian The fitness scaling function is Rank
MATLAB version 7.6 is used to tune the conventional PID controller. By minimizing the fitness function we get the optimal parameters of PID controller. The optimal parameters of PID controller are given in appendix 1. 6. TESTSYSTEM
The proposed scheme of GAPID controller for a multiarea power system, described in the previous section, and has been tested on a 75-bus Indian system [11]. The Indian power system is in the process of restructuring. As a first step in this process, generation, transmission, and distribution are being separated. In the present paper, a deregulated market scenario has been assumed in 75-bus system. The 75-bus system has been divided into four control areas.
For the system, at least one Disco and one Genco, having the Poolco based contract, have been considered in each area. The number of Gencos and Discos in the 75-bus system is given in Tables I respectively. A general purpose Governor-Turbine model has been used, which is taken from [12].
PID controller is first tuned using least square minimization method to determine the optimal parameters of PID controller. Further, the proposed Genetic Algorithm based PID (GAPID) controller is applied to area-i as described in fig(2).
Table I
CONTROL AREAS IN 75-BUS POWER SYSTEM
Control Area Area Rating(MW) Market Participants
AREA-1 460 Genco 1,2,3, Disco-1
AREA-2 994 Genco 4,5,6,7,8,Disco-2
AREA-3 400 Genco 9,10
AREA-4 4470 Genco 11,12,13,14,15Disco-3
7. SIMULATIONRESULTS
To simulate the 75-bus system, it is assumed that both generators as well as loads are participating in the frequency regulation market, and both Poolco and mixed (poolco and bilateral) transactions are taking place simultaneously. Gencos and Discos bids of area-1, 2, 3 and 4 were assumed as given in Table II. The participation factor of different Gencos can be determined by using the bids of the generators [6].
Table II
AREA-1 AREA-2 AREA-3 AREA-4
Gen./Dis. Pri. Cap. Gen./Dis. Pri. Cap. Gen./Dis. Pri. Cap. Gen./Dis. Pri. Cap.
G1 4.9 15.0 G4 5.0 25.0 G9 5.0 25.0 G11 4.6 15.0
G2 4.75 30.0 G5 5.4 40.0 G10 4.8 35.0 G12 5.3 25.0
G3 5.1 25.0 G6 4.9 20.0 G13 4.9 25.0
D1 4.8 10.0 G7 6.0 25.0 G14 5.6 25.0
G8 4.7 25.0 G15 4.7 35.0
D2 5.5 10.0 D3 5.5 10.0
(i) Poolco Based Transactions
Assume a step change in load demand of area-1 by 0.1087 pu (50 MW), area-2 by 0.0503 pu (50 MW), area-3 by 0.125 pu (50 MW) and area-4 by 0.0224 pu (100 MW) at time t=0. To meet these changes in load demand, the responses were obtained using MATLAB Simulation with Least Square Minimization method and GAPID controllers for the proposed multi-area AGC scheme. The change in load demand of any area is met by the Gencos & Discos in the same area, according to their Poolco transactions. The power balance for different areas is achieved in the following manner:
In area-1, Genco-1 increases its output by 10 MW (0.0217 pu), Genco-2 by 30 MW (0.0652 pu) and Disco-1 curtails its load by 10 MW (0.0217 pu) to meet the 50 MW increase in the load demand. In area-2, Genco-6 by 15 MW (0.0151 pu), Genco-8 by 30 MW (0.0302 pu) and Disco-2 curtails its
load by 5 MW (0.00503 pu) to meet the 50 MW increase in the load demand.
In area-3, Genco-9 increases its output by 23 MW (0.0562 pu) and Genco-10 increases its output by 27MW (0.0688 pu) to meet the 50 MW increase in the load demand. In area-3 no Disco is selected for load curtailment.
In area-4, Genco-11 increases its output by 25 MW (0.0056 pu), Genco-13 by 45 MW (0.0101 pu), Genco-13 by 20 MW (0.00447 pu) and Disco-3 curtails its load by 10 MW (0.0022 pu) to meet the 100 MW increase in the load demand.
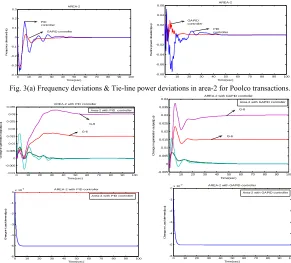
Typical results for the frequency deviations and tie-line power deviations in area-2 is given in Fig. 3(a) and change in generations output, load changes in area-2 is shown in Fig.3(b).These figures also compares the results of least square tuned PID & GAPID controller. Similar results can be obtained for other areas also
.
Fig. 3(a) Frequency deviations & Tie-line power deviations in area-2 for Poolco transactions.
Fig. 3(b) Changes in generation’s outputs & load changes in area-2 with PID controller & GAPID controller for Poolco transactions.
(ii)
Mixed (poolco and bilateral) transactionsThe Bilateral transactions considered between various Gencos and Discos are given below. 10% of area-1 load demand changes to be provided by Genco-5 of the area-2.
10% of area-2 load demand changes to be provided by 4 of the area-2 itself and 20% by Genco-11 of area-4.
In area-3 no bilateral transactions is considered.
10% of area-4 load demand changes to be provided by Genco-5 of the area-2 and 20% by Genco-12 of area-4 itself.
Assume the same step change in load demand in the respective areas. The changes in load demand of all the areas are met according to their bilateral and Poolco transactions. Power balance in area-2 is achieved in the following manner:
0 10 20 30 40 50 60 70 80 90 100 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 AREA-2 Time(sec) Fr eq uen c y d ev iat io n( H z ) PID controller GAPID controller
0 10 20 30 40 50 60 70 80 90 100 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 AREA-2 Time(sec) T ie-li ne p ow e r de v ia ti o n( p. u
) GAPIDcontroller PID controller
0 10 20 30 40 50 60 70 80 90 100 -0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
AREA-2 with PID controller
Time(sec) C h an ge i n ge ne rat ion ou tpu t( p. u ) G-6 G-8
Area-2 with PID controller
0 10 20 30 40 50 60 70 80 90 100 -0.005 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
AREA-2 with GAPID controller
Time(sec) C ha nge i n gener at io n o ut p ut (p. u) G-8 G-6
Area-2 with GAPID controller
0 10 20 30 40 50 60 70 80 90 100 -6 -5 -4 -3 -2 -1 0x 10
-3 AREA-2 with PID controller
Time(sec)
C
hange i
n Load dem
an
d(
p.
u)
Area-2 with PID controller
0 10 20 30 40 50 60 70 80 90 100 -6 -5 -4 -3 -2 -1 0x 10
-3 AREA-2 with GAPID controller
Time(sec) C hange i n L oad dem and( p. u)
4 of the area-2 increases its generation by 5 MW (0.00503 pu, at the base of area-2) and Genco-11 of area-4 increases its generation by 15 MW to fulfill the bilateral contract with the Disco of area-2. To implement the Poolco contract of area-2, Genco-6 increases its output by 14 MW (0.0104 pu), Genco-8 by 15 MW (0.0158 pu) and Disco-2 curtails its load by 1 MW (0.00128 pu) to meet the 50 MW increase in the load demand.
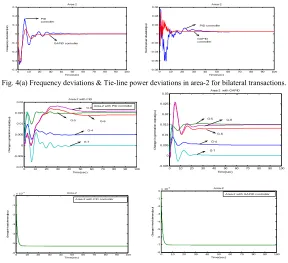
Similar results can be obtained for other areas also. Typical results for the frequency deviations and tie-line power deviations in area-2 is given in Fig. 4(a) and change in generations output, load changes in area-2 is shown in Fig.4 (b).
Fig. 4(a) Frequency deviations & Tie-line power deviations in area-2 for bilateral transactions.
Fig. 4(b) Changes in generation’s outputs & load changes in area-2 with PID controller & GAPID controller for bilateral transactions.
The tie-line power deviation, in this case, will be not settles to zero as in the previous case. Due to the bilateral transitions between two different areas, the tie-line power will change.
CONCLUSION
A Genetic Algorithm based PID (GAPID) controller for multiarea AGC, suitable for the restructured competitive electricity market, has been proposed in this paper to meet the Poolco-based as well as bilateral transactions. The proposed controller has been successfully tested on a 75-bus Indian power system for all types of load following contracts. In all the cases simulated, the area frequency error got eliminated in the steady state, and Gencos shared the increase in demand of the area, as per their participation in the frequency regulation market. Results of the GAPID based controller were compared with those obtained with a conventional Least Square minimization approach based PID controller. It is observed that the response of the Gencos for bilateral contracts is the same with both the controllers. For Poolco-based contracts performance of the GAPID controller is as good as the conventional PID controller.
ACKNOWLEDGEMENT
The authors are thankful to the Department of Electrical Engineering, Indian Institute of Technology, Roorkee, for providing the computing facilities to carry out this work. Sandeep Bhongade is grateful to G.S. Institute of Technology & Science, Indore (M.P) and to AICTE, Government of India for sponsoring him for doctoral research work.
0 10 20 30 40 50 60 70 80 90 100 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 Area-2 Time(sec) F req uen c y dev iat io n( H z ) PID controller GAPID controller
0 10 20 30 40 50 60 70 80 90 100 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 Area-2 Time(sec) T ie-line p ow er d ev iat io n( p
.u) PID controller
GAPID controller
0 10 20 30 40 50 60 70 80 90 100 -0.01 -0.005 0 0.005 0.01 0.015 0.02
Area-2 with PID
Time(sec) C han ge i n gener at ion out put (p. u ) G-4 G-5 G-6 G-8 G-7
Area-2 with PID controller
0 10 20 30 40 50 60 70 80 90 100 -0.005 0 0.005 0.01 0.015 0.02 0.025
0.03 Area-2 with GAPID
Time(sec) C ha nge i n ge ner a ti on out pu t( p .u) G-5 G-8 G-6 G-4 G-7
0 10 20 30 40 50 60 70 80 90 100 -6 -5 -4 -3 -2 -1
0x 10-3 Area-2
Time(sec) C h ang e i n l o ad dem and (p. u)
Area-2 with PID controller
0 10 20 30 40 50 60 70 80 90 100 -8 -7 -6 -5 -4 -3 -2 -1 0x 10
-3 Area-2 Time(sec) C hange i n l oad dem and( p. u)
Appendix
[1],[2],[3] Table [1] Parameters of PID controller for 75-bus four area power systems
Least Square minimization Genetic Algorithm based optimal values of PID
Control Area
Area-1 0.0 -0.5 0.5 -0.7412 -0.4989 0.1859
Area-2 0.5 -0.15 0 1.4524 -3.0132 0.0028
Area-3 0.0 -5 0.5 -0.8090 -1.9705 -0.0156
Area-4 0.0 -1 0.2 0.8975 -0.1773 -0.0206
REFERENCES
[1] O. I. Elgerd, and C. Fosha, “Optimum Megawatt-Frequency Control of Multi-Area Electric Energy Systems,” IEEE Transactions on Power Apparatus and Systems, vol. PAS-89, No. 4, April 1970, pp. 556-563.
[2] O. I. Elgerd, and C. Fosha, “The Megawatt-Frequency Control Problem: A New Approach via Optimal Control Theory,” IEEE Trans. Power Apparatus System, vol. PAS-89, Apr. 1970, pp. 563–577.
[3] N. Jaleeli, D. N. Ewart, and L. H. Fink, “Understanding Automatic Generation Control,” IEEE Transactions on Power Systems, Vol. 7, No. 3, August 1992, pp. 1106-1122.
[4] R.D. Christie and Anjan Bose, “Load Frequency Control Issues In Power System Operation after Deregulation,” IEEE Transactions on Power Systems, vol. 11, No.3, August 1996, pp. 1191-1200.
[5] UBAID M. AL-SAGGAF ” An approximation technique to tune PID controllers”, Computers & Electrical Engineering, Volume 17, Issue 4, 1991, Pages 313-320.
[6] Tyagi, B.,Srivastava, S.C,”Automatic generation control scheme based on Dynamic Participation of Generators for competitive electricity markets”, in Proc. National Power Systems(NPSC), December 16-18, 2009, IIT-Bombay.
[7] Donde V, Pai M.A and Hiskens I.A, ‘Simulation and optimization in an AGC system after deregulation”, Volume 16, Issue 3, Aug.2001, Pages: 481-489.
[8] J.Kumar, K.nag and G.Sheble, “AGC Simulator for price-based operation part-2,” IEEE Transactions on Power Systems, vol.12, No. 2, May 1997, pp. 527-532.
[9] David E. Goldberg, “Genetic Algorithms in search, Optimization, And Machine learning “, Pearson Edition, Asia-1999.[Book] [10] Holland J.H., 1975. Adaptation in Nature and Artificial Systems. University of Michigan Press.
[11] S. N. Singh and S. C. Srivastava, “Corrective action planning to achieve feasible optimal power flowsolution,” Proc. Inst. Elect. Eng. C, vol.142, pp. 576–582, Nov. 1995.