Comparative Study of Combinatorial 3D
Reconstruction Algorithms
Abdelaaziz MAHDAOUI#1, Aziz BOUAZI*2, Abdallah. MARHRAOUI HSAINI*2, El Hassan SBAI*2
#
Department of Physics, Faculty of Science, University Moulay Ismail, Meknes, Morocco *Ecole Supérieure de Technologie, University Moulay Ismail, Meknes, Morocco
Equipe Commande des systèmes et Traitement de l’Information (C.S.T.I)
Abstract---We present in this paper a comparative study between different combinatorial methods of reconstruction 3D from point cloud. Indeed, point cloud obtained experimentally from a laser scanner, we applied different reconstruction methods: Poisson, Marching-cube, Ball-pivoting and Alpha-shape. Our comparison criterion is based on the computation time as well as the quality of the mesh.Quality is obtained by the measurement of the compactness of the triangles which constitute this mesh. We then lay out the results obtained in the form of a summary table highlighting the advantages and disadvantages of each method.
Keywords—mesh, points cloud, compactness, Poisson,
Marching-cube, Alpha-shape, Ball-pivoting.
I. INTRODUCTION
Given a set of points P ∈ R3sampled on a surface
S, the objective of the surface reconstruction is to compute a continuous model of S from P. This model is called reconstruction of S from P.
Surface reconstruction takes place in a large number of applications. Ithas been the subject of research for thirty years in the communities of graphical computing, geometric modelling and algorithmic geometry [1, 2]. This area has developed considerably in recent years, with the development of 3D technology acquisition.
Surface reconstruction techniques can be classified into two main approaches: the combinatorial approach and the adjustment approach of a predefined model. A large number of combinatorial methods have the principle of establishing adjacency relations between the points of a sample [3, 4, 6]. The second approach is based on the idea of approximating the surface sampled using predefined models [5], based on global or local assumptions about the shape to be reconstructed.
This work outlinesa brief introduction to mesh combinatorial reconstruction methods. Its main objective is to analyse and compare some methods and main approaches on the basis of two criteria: a criterion for compactness of surface and a criterion of run times.
This paper is organized as follows. In section 2, we would recall reconstruction methods. In section 3, we
lay out the evaluation of mesh quality.
Afterwards,section 4 would outlines the comparison results. Finally, we make conclusion some conclusions will be drawn from the study.
II. RECONSTRUCTION METHODS CATEGORIES
A. Combinatorial approach The aim of combinatorial methods is to establish connectivity relations between neighboring points on the sampled surface. To achieve this objective in the absence of knowledge on the organization of the data, the topological information can be deduced from the proximity relations between the 3D points under certain assumptions concerning the density of the sample. The principal combinatorial methods of which we distinguish three main categories according to the nature of the algorithm, are: volumetric methods, surface expansion methods and methods based on Delaunay triangulation using the poles.
Volumetric methods: This surface reconstruction
approach is the first method to be based on the Delaunay triangulation. It was introduced by Boissonnat [11] with the Sculpture algorithm.
Surface expansion reconstruction methods:
Surface expansion methods reconstruct an incrementally triangulated surface from the edges of an initial surface. The latter can be constructed by directly considering an overall topological criterionor at the end of a post-processing phase of a set of facets. Several other algorithms adopting this principle of incremental construction by advance of front have been developed such as the algorithm Ball-pivoting [14].
Methods using the pole: the previously described
algorithms rely primarily on local criteria to establish or select valid connectivity relationships. A family of algorithms exploits the fact that a solid object can be seen as an infinite union of maximal balls centred on its median axis.
B. Adjustment of models
process is then mainly a problem of optimization. The surface can be constrained to pass through the data points, we are talking about of interpolation or in the proximity, and we are talking about then of approximation.
The objective model can be defined as a function depending on a number of parameters. The objective is then to find the values of the parameters so that the model wouldinterpolate or approximates the input data according to a global or local approach. More generally, a model can be represented by a function in a parametric or implicit manner. There are two main categories:
Reconstruction by adjusting an implicit
surface model: The problem is equivalent to interpolating or approximating the data using
a continuous function f ∶ R3 → R where the
set of zeros represents a surface close to the sampled surface [12, 13].
Deformable Models: Methods in this
category deform an initial surface until a good approximation of the sample of points is obtained. The surface is considered as an elastic membrane to which a deformation process is applied to minimize energy functional such as Zhao et al. [15].
In this work, we outline a comparative study of four combinatorial methods [9]representative of the combinatorial approaches mentioned above. These methods are most commonly used in the literature and a source of inspiration for many works.
III. EVALUATION OF MESH QUALITY
A usual way of quantifying the quality of a mesh is made by the quality of the elements that makes it up. A quality criterion commonly used to quantify the quality of a triangle is the criterion of form. A triangle is regular if it maximizes its measure for a given measure of its boundary. Among the criteria of form are the ratio of the rays, the ratio of the means, the coefficient of the interpolation error and the ratio of the edges.
In this work, we will adopt the criterion of the form ratio of means.
To measure the quality of the obtained meshes, we compute the quality of the triangles using the compactness formula proposed by Guéziec [7]:
c
= 4 3a
l12+ l22+ l32 (1)
where li are the lengths of the edges of a triangle and
a is the area of the triangle. We notice that this
measureequals1 for an equilateral triangle and 0 for a triangle whose vertices are collinear. According to [8],
a triangle is of acceptable quality if c ≥ 0.6.
IV. RESULTS
In this section, we will make an empirical comparison
between the four methods of combinatorial
reconstruction: the Poisson surface reconstruction method [10], the Alpha-Shape method [16], the Marching Cube method [17] and the Ball-Pivoting algorithm [14]. The comparison between these methods is conducted from the point of view of computation time and mesh quality (TABLE I) and the number of triangles per mesh (TABLE II).
The four methods are executed on a computer with the following features: Core i3 CPU, 3.40 GHz, 2GB RAM.
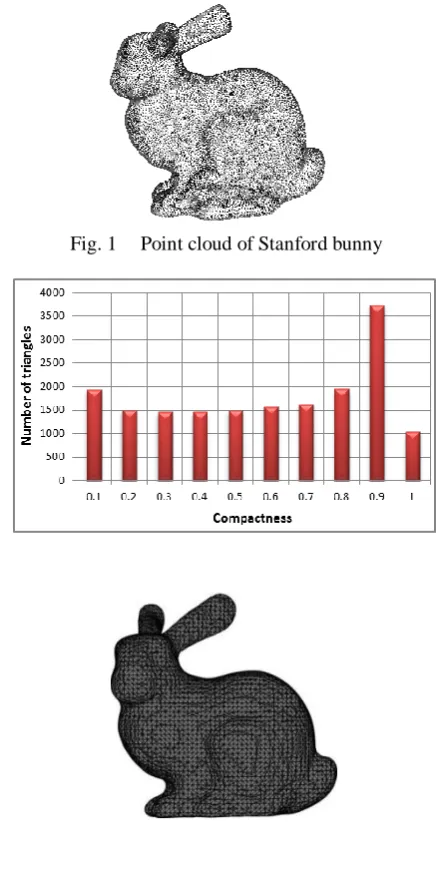
To validate the effectiveness of these methods, we have opted for Stanford bunny (Fig. 1). TABLE I shows the numerical results obtained by the
implementation of the four
methods, in between these results are the compactness and the computing time. Fig. 2 presents mesh and compactness histogram for each method. TABLE 2 contains Results relative to number of triangles per mesh.
Fig. 1 Point cloud of Stanford bunny
(b)
(c)
(d)
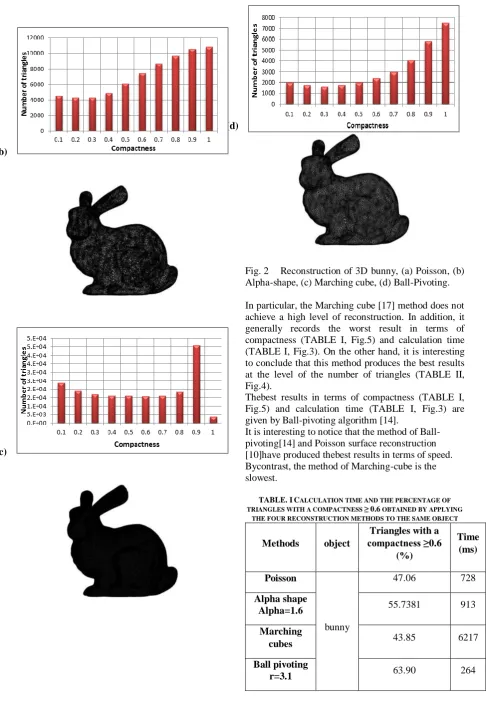
Fig. 2 Reconstruction of 3D bunny, (a) Poisson, (b)
Alpha-shape, (c) Marching cube, (d) Ball-Pivoting.
In particular, the Marching cube [17] method does not achieve a high level of reconstruction. In addition, it generally records the worst result in terms of compactness (TABLE I, Fig.5) and calculation time (TABLE I, Fig.3). On the other hand, it is interesting to conclude that this method produces the best results at the level of the number of triangles (TABLE II, Fig.4).
Thebest results in terms of compactness (TABLE I, Fig.5) and calculation time (TABLE I, Fig.3) are given by Ball-pivoting algorithm [14].
It is interesting to notice that the method of Ball-pivoting[14] and Poisson surface reconstruction [10]have produced thebest results in terms of speed. Bycontrast, the method of Marching-cube is the slowest.
TABLE. ICALCULATION TIME AND THE PERCENTAGE OF TRIANGLES WITH A COMPACTNESS ≥0.6 OBTAINED BY APPLYING
THE FOUR RECONSTRUCTION METHODS TO THE SAME OBJECT
Methods object
Triangles with a compactness ≥0.6
(%)
Time (ms)
Poisson
bunny
47.06 728
Alpha shape
Alpha=1.6 55.7381 913
Marching
cubes 43.85 6217
Ball pivoting
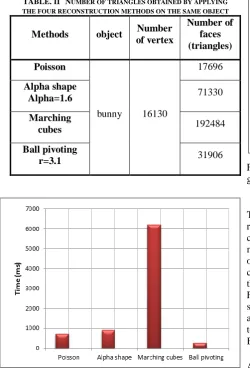
TABLE. II NUMBER OF TRIANGLES OBTAINED BY APPLYING THE FOUR RECONSTRUCTION METHODS ON THE SAME OBJECT
Methods object Number of vertex
Number of faces (triangles)
Poisson
bunny 16130
17696
Alpha shape
Alpha=1.6 71330
Marching
cubes 192484
Ball pivoting
r=3.1 31906
Fig. 3 The figure shows the performance of point of
view calculation time
Fig. 4 The figure shows the performance of four
approaches of point of view of number of triangles.
Fig. 5 Percentage of triangles with a compactness
greater than 0.6 (%)
V. CONCLUSION
This work has presented a brief overview of surface reconstruction methods. We have presented different
characteristics of four basic reconstruction
methods.Four implementations have been performed on a set of data. In addition, the results of an empirical comparison have been presented. We have compared the computational time and quality of meshes.
From the point of view of quality, the results have showed that methods ball-pivoting algorithm and alpha-shape algorithm have given the best results in terms of compactness. In term of calculation time Ball-pivoting algorithm have given the best time.
Acknowledgment
We thank Stanford University Computer Graphics Laboratory for bunny database.
References
[1] R. Mencl and H. Müller. Interpolation and approximation of
surfaces from three-dimensional scattered data points. Eurographics State of the Art Report, pages 51–67, 1998.
[2] O. Schall and M. Samozino. Surface from scattered points: A
brief survey of recent developments. In First International Workshop on Semantic Virtual Environments, pages 138– 147, 2005.
[3] F. Cazals and J. Giesen. Delaunay Triangulation based
Surface Reconstruction: Ideas and Algorithms. Technical Report 5393, INRIA, November 2004.
[4] T. K. Dey. Curve and surface reconstruction. Chapter in
Handbook of Discrete and Computational Geometry, Goodman and O’ Rourke eds., CRC press, 2nd edition, 2004.
[5] A.M. Hsaini, A. Bouazi, A. Mahdaoui, E.H. Sbai.
Reconstruction and adjustment of surfaces from a 3-D point cloud. International Journal of Computer Trends and Technology (IJCTT) V37(2):105-109, July 2016.
[6] R. Allègre, R. Chaine, and S. Akkouche. A Dynamic Surface
Reconstruction Framework for Large Point Sets. In Proc. IEEE/Eurographics Symposium on Point-Based Graphics, pages 17–26, 2006.
[7] A. Guéziec. Locally Toleranced Surface Simplification. IEEE
Transactions on Visualization and Computer Graphics, pp. 168–189, 1999.
[8] E. Bank Randolph. PLTMG: A Software Package for Solving
[9] F. Bernardini, J. Mittleman, H. Rushmeier, C. Silva, G.
Taubin. The Ball-Pivoting Algorithm for Surface
Reconstruction. IEEE transactions on visualization and
computer graphics, pp. 349-359, 1999.
[10] M. Kazhdan, M. Bolitho, H. Hoppe.Poisson surface
reconstruction.Proceeding SGP '06 Proceedings of the fourth
Eurographics symposium on Geometry processing Pages 61-70 Cagliari, Sardinia, Italy — June 26 - 28, 2006
[11] J.-D. Boissonnat. Geometric structures for three-dimensional
shape representation. ACM Transactions on Graphics, 3(4)
:226–286, 1984.
[12] H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, and W.
Stuetzle. Surface Reconstruction from Unorganized Points. Computer Graphics (Proc. SIGGRAPH), 26(2) :71–78, 1992.
[13] D. Levin. The approximation power of moving least-squares.
Math. Comp., 67(224) :1517–1531, 1998.
[14] F. Bernardini, J. Mittleman, H. Rushmeier, C. Silva, and G.
Taubin. The Ball-Pivoting Algorithm for Surface
Reconstruction. IEEE Transactions on Visualization and
Computer Graphics, 5(4) :349–359, 1999.
[15] H.-K. Zhao, S. Osher, and R. Fedkiw. Fast Surface
Reconstruction using the Level Set Method. InProc. IEEE
Workshop on Variational and Level Set Methods in Computer Vision (VLSM), pages 194–202, 2001.
[16] Herbert Edelsbrunner, Ernst P Mücke. Three-dimensional
alpha shapes. ACM Transactions on Graphics (TOG). 13(1) : 43-72, 1994.
[17] Öztireli, A. C., Guennebaud, G. and Gross, M. (2009),