Tracking of Super Chaotic System with Static
Uncertain Functions and Unknown Parameters
Yuqiang. Jin
Department of Training, Naval Aeronautical and Astronautical University, Yantai, China
Email: [email protected]
Junwei Lei
Department of Control Engineering, Naval Aeronautical and Astronautical University, Yantai, China
Email: [email protected]
Yong Liang
Department of Control Engineering, Naval Aeronautical and Astronautical University, Yantai, China
Email: [email protected]
Abstract—The tracking of a four dimension super chaotic
system with unknown parameters and uncertain static functions is researched in this paper and a robust adaptive tracking law is designed according to the Lyapunov stability theorem. Especially, the multi-unknown functions and parameters are solved by designing of adaptive turning law. It is a meaningful method both in theory and in engineering practice because the multi-input multi output system considered in this paper is complex and close to the secrete communication situation, in which the tracking and synchronization of chaotic system is usually applied.
Index Terms— adaptive,chaos,uncertainty,stabilization,
robust, unknown parameters.
I.
I
NTRODUCTIONChaos systems have complex dynamical behaviors that
possess some special features such as being extremely
sensitive to tiny variations of initial conditions, and
having bounded trajectories with a positive leading
Lyapunov exponent and so on
[1-7]. Synchronization of
chaos systems with unknown parameters was investigated
widely by researchers from various fields.
The stability of tracking problem of a kind of single
input and single output nonlinear systems , which can be
transformed into strict feedback form, was researched in
[1,2] under the situation that there exist unknown
parameters and uncertain nonlinear functions
[33-56]. But it
needs the assumption that the bounds of unknown
parameters and bound functions of uncertain nonlinear
functions are known.
Manfeng Hu and Tiegang Gao and E.M.Elabbasy
[4,5,6]studied the unknown parameters problem with different
strategies and Manfeng Hu used the parameter
identification method to cope the unknown parameters in
synchronization of chaotic system, but all states of the
system were used to construct the control law.
Fang Tang and Zheng-Ming Ge
[7,8]used adaptive
method to solve synchronization problem with
uncertainties. Gauthier, J. P
[9]used a simple observer
method, which is very effective and novel. Khalil and
Hao Lei
[10,11,12]used output feedback methods to
synchronize chaotic systems but the defect is that the
method depend on high gain feedback. A kind of
dead-zone nonlinearity
[34,45]was studied in synchronization of
chaotic systems and Her-Terng Yau
[35]researched the
input nonlinearity situation.
Synchronization problem with different structures was
considered by Jian Huang
[36-38]. The reduce order
synchronization problem was studied by Ming-Chung
Ho
[39]. Tsung-Ying Chiang
[41]studied the
anti-synchronization problem for chaotic system with
dead-zone nonlinearity. And input nonlinearity was considered
by Her-Terng Yau
[42]. Sliding mode control strategy was
adopt in synchronization by Haitao Yu
[43]and Chao-Lin
Kuo
[44]. Also other control methods were studied by
researchers to solve the synchronization problem with
uncertainties, such as sliding mode control
[13],adaptive
method
[14-16,19-33,40], fuzzy control
[17], active
control
[46,51,52,53], feedback control
[50,54]and robust
control
[18, 47 48,49].
The synchronization problem of chaotic systems,
which can be transformed into single input and single
output nonlinear dynamic system, was researched under
the conditions that there are both unknown parameters
and unknown nonlinear functions. But only the single
input and single output situation is concerned in those
references
[21-28]. In this paper, the input and
multi-output problem is considered and a robust adaptive
synchronization law is designed for a four dimension
super chaotic system based on Lyapunov stability
theorem.
II.
P
ROBLEMD
ESCRIPTION1
(
2 1)
lb 4cos
2 1x
&
=
a x
−
x
+
k x
x
+
u
(1)
2 1 1 1 3 lb
(1 sin(
2 3))
2 2x
&
=
bx
−
k x x
+
k
+
x x
x
+
u
(2)
2
3 3 1
1 2 3 4 1 3
2 cos
(
))
lb
x
cx
hx
k
x x x x
x
u
= −
+
+
−
+
&
(
(3)
4 1 lb 3
(3 sin(
1 3))
4x
&
= −
dx
+
k x
+
x x
+
u
(4)
Without loss of generality, it can be written as
( )
( )
( , )
x
&
=
f x
+
F x
θ
+ Δ
x t
+
bu
(5)
where
x
=
[ ,
x
1L
,
x
n]
T,
u
=
[ ,
u
1L
,
u
n]
Tare
n
demen
si
-on
vectors. It can be expended as
1 1
( ,
1,
4)
( )
1( , )
1 1x
&
=
f x
L
x
+
F x
θ
+ Δ
x t
+
b u
(6)
2 2
( ,
1,
4)
( )
2( , )
2 2x
&
=
f x
L
x
+
F x
θ
+ Δ
x t
+
b u
(7)
3 3
( ,
1,
4)
( )
3( , )
3 3x
&
=
f x
L
x
+
F x
θ
+ Δ
x t
+
b u
(8)
4 4
( ,
1,
4)
( )
4( , )
4 4x
&
=
f x
L
x
+
F x
θ
+ Δ
x t
+
b u
(9)
where
f x
( )
are known functions of the system.
( )
F x
are known functions,
Δ
( , )
x t
are uncertain
dynamic functions ,
b
iis a known parameter vecter.
The objective of tracking problem is to design a control
law
u
=
u x
( , , )
θ
ˆ ˆ
q
,
θ
&
ˆ
=
g x
( , )
θ
ˆ
,
q
ˆ
&
=
g x q
( , )
ˆ
such
that the state is stable and
x
→
0
.
Define
z
i= −
x
ix
idthen
1 4 1 4
( ,
,
)
( ,
,
)
i i i i i
z
&
=
f x
L
x
+ Δ
x
L
x
+
b u
(10)
III.
A
SSUMPTIONThe assumption of the above system is as follows:
Assumption 1: There exists unknown positive
parameter
q
i*≤
d
ifor(
1
≤ ≤
i
n
) such that
q
*i≤
d
i*
( , )
( )
i
X t
q
iψ
iX
Δ
≤
(11)
where
d
iis a unknown constant,
ψ
i( )
X
is a known
smooth function.
IV.
D
ESIGNO
FR
OBUSTA
DAPTIVEC
ONTROLLERConsider the situation with only one unknown
parameter , the I th subsystem can be written as
1 4
1 4
( ,
,
)
( )
( ,
,
)
i i i i
i i i
z
f x
x
F x
x
x
b u
θ
=
+
+ Δ
+
&
L
L
(12)
Design the control
u
ias
2 1 4
*
( )[
( ,
,
)
ˆ
ˆ
( )
( )
( )]
i i i
i i i i zi i
u
f
x
f x
x
F x
θ
q
ψ
x
f
z
=
−
−
−
−
L
(13)
1
2i
( )
if
x
=
b
−,
1 2
1
1/ 3 2 / 3
3 4
( )
+
3
+
exp(
)+
( )
2
i
zi i i i i
i i
i i i i i
z
f
z
k z k
z
k
z
z
k sign z
ε
=
+
(14)
then
* * *ˆ
[ ( )
( )
( )
( )]
ˆ
( )
( )
( )
( )
i i i i i i i i zi i
i zi i i i i i i i i i
z z
z
x
q
x
F x
f z
z f z
q z
x
q
x z
F x z
ψ
θ
ψ
ψ
θ
= Δ
−
+
−
≤ −
+
−
+
%
&
%
It holds
*( )
( )
( )
i i i zi i i i i i i i
z z
&
= −
z f
z
+
z q
%
ψ
x
+
z
θ
%
F x
(15)
where
θ
%
iis defined as
θ θ θ
%
i= −
iˆ
iand
* *
ˆ
( )
i i i i
q
%
=
q
−
q sign z
, then
ˆ
( )
i i i
q
&%
= −
q sign z
&
(16)
Design the adaptive turning law as
ˆ
i i( )
i( )
iq
&
=
ψ
x z sign z
(17)
ˆ
( )
i i
z F x
i iθ
&%
= − =
θ
&
(18)
Then
* *2 * * * *1
( )
(
)
2
( )
( )
( )
( )
( )
( )
0
i i i i
i i i
i i i i i
i i i i i i
z q
x
q
z q
x
q
x z sign z sign z
z q
x
q
x z
ψ
ψ
ψ
ψ
ψ
′
+
=
−
=
−
=
%
%
%
%
%
%
(19)
And
21
( )
(
)
2
( )
ˆ
( )
( )
( )
0
i i i
i i i
i i i
i i i i
z F x
F x
F x
z F x
z F x
θ
θ
θ
θθ
θ
θθ
θ
θ
′
+
=
+
=
−
=
−
=
%
%
&
%
% %
&
%
%
%
%
(20)
-60 -40 -20 0 20 40 -50 0 50 100 150 -400 -200 0 200 400 x2 x3 x4
Figure 2. Trajectory of uncontrolled chaotic systems(2).
2 *2 2
1
1
1
1
{
}
2
2
2
n
i i i
i
V
z
q
θ
=
=
∑
+
%
+
%
(21)
Then it is easy to define that
( )
0
i zi i
V
&
≤ −
z f
z
≤
(22)
So the tracking can be fulfilled.
Consider the situation of multi-uncertain functions, the
model can be described as follows
1 4 1 1 4 1
( ,
,
)
( )
( ,
,
)
mi i ij ij
j
r
ij i i
j
z
f x
x
F x
x
x
b u
θ
= ==
+
+
Δ
+
∑
∑
&
L
L
(23)
Design
u
ias
2 1 4
1 * 1
( )[
( ,
,
)
ˆ
( )
ˆ
( )
( )]
i i i
m
ij ij j
r
ij ij zi i
j
u
f
x
f x
x
F x
q
x
f
z
θ
ψ
= ==
−
−
−
−
∑
∑
L
(24)
12i
( )
if
x
=
b
−,
1 2
1 1/ 3 2 / 3
3 1 1 4 1
( )
3
exp(
)
(
)
2
i zi i i i i
i i
i i i i i
z
f
z
k z
k
z
k
z
z
k sign z
ε
= −
−
+
−
−
(25)
Define
θ
%
ijas
θ
%
ij=
θ θ
ij−
ˆ
ijand
* *
ˆ
( )
i ij ij i
q
%
=
q
−
q sign z
,Then
ˆ
( )
ij ij i
q
&%
= −
q sign z
&
(26)
Design the adaptive turning law as
ˆ
ij ij( )
i( )
iq
&
=
ψ
x z sign z
(27)
ˆ
( )
ij ij
z F x
i ijθ
&%
= − =
θ
&
(28)
Define a Lyapunov function as
2 *2 2
1 1 1
1
1
1
{
(
)
(
) }
2
2
2
n m r
i ij ij
i j j
V
z
q
θ
= = =
′
′
=
∑
+
∑
%
+
∑
%
(29)
So it is easy to prove that
( )
0
i zi i
V
&
≤ −
z f
z
≤
(30)
Then the tracking can be fulfilled.
V.
N
UMERICALS
IMULATIONTake the below super chaotic system as an example, it
can be described as follows:
1
(
2 1)
lb 4cos
2 1x
&
=
a x
−
x
+
k x
x
+
u
(31)
x
&
2=
bx
1−
k x x
1 1 3+
k
lb(1 sin(
+
x x
2 3))
x
2+
u
2(32)
23 3 1
1 2 3 4 1 3
2
cos(
))
lb
x
cx
hx
k
x x x x
x
u
= −
+
+
−
+
&
(
(33)
4 1 lb 3
(3 sin(
1 3))
4x
&
= −
dx
+
k x
+
x x
+
u
(34)
The unknown nonlinear function satisfies below
assumption:
*
4
cos
2 1 4lb
k x
x
≤
q x
,
*
2 3 2 2 2
(1 sin(
))
lb
k
+
x x
x
≤
q x
(35)
*
1 2 3 4 1 3 1
2 cos(
))
lb
k
(
−
x x x x
x
≤
q x
(36)
*
3
(3 sin(
1 3))
4 3lb
k x
+
x x
≤
q x
(37)
Choose parameters as
a
=
10
,
b
=
40
,
c
=
2.5
,
10.6
d
=
,
k
=
1
,
h
=
4
,
k
lb= −
0.2
the system is
chaotic. And choose the initial state as
1
(0) 1
-20 -10 0
10 20
30
-50 0 50 -50 0 50 100 150
x1 x2
x3
Figure 1.Trajectory of uncontrolled chaotic systems(1).
0 2 4 6 8 10 12
-0.2 0 0.2 0.4 0.6 0.8 1
t
x1
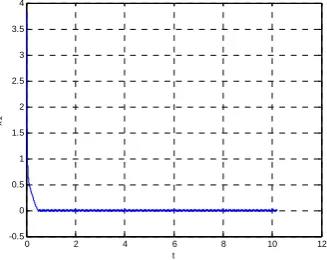
Figure3. Trajectory of state x1.
0 2 4 6 8 10 12
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2
t
x2
Figure4. Trajectory of state x2.
0 2 4 6 8 10 12
-2 -1.5 -1 -0.5 0 0.5
t
x3
Figure5. Trajectory of state x3.
0 2 4 6 8 10 12
-0.5 0 0.5 1 1.5 2
t
x4
Figure6. Trajectory of state x4.
0 2 4 6 8 10 12
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4
t
x1
Figure 7.. Trajectory of state x1.
The above figure 1 shows the behavior of uncontrolled
chaotic system states x1,x2 and x3 .
The above figure 2 shows the chaotic behavior of
uncontrolled states x2, x3 and x4.
Consider a simple situation to do the simulation first,
assume there is not unknown parameters, then it means
that all the parameters are known for the controller
designer. The objective of the controller is to design a
controller law such that all the states of the chaotic
system can converged to zero for any initial states of
chaotic system. The stabilization process can see the
below figures.
The above figure 3 shows the stabilization process of
chaotic state x1.
The above figure 4 shows the stabilization process of
chaotic state x2 without unknown parameters.
The above figure 5 shows the stabilization process of
chaotic state x3 without unknown parameters
The above figure 6 shows the stabilization process of
chaotic state x4 without unknown parameters
0 2 4 6 8 10 12 -0.5
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2
t
x2
Figure8. Trajectory of state x2.
0 2 4 6 8 10 12
-7 -6 -5 -4 -3 -2 -1 0 1
t
x3
Figure 9. Trajectory of state x3
0 2 4 6 8 10 12
-2 0 2 4 6 8 10
t
x4
Figure 10. Trajectory of state x4.
0 0.2 0.4 0.6 0.8 1 1.2 1.4
0.5 1 1.5 2 2.5 3 3.5 4
t
x1
Figure 11. Tracking of state x1
0 0.2 0.4 0.6 0.8 1 1.2 1.4
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2
t
x2
Figure 12. Tracking of state x2
0 0.2 0.4 0.6 0.8 1 1.2 1.4
-7 -6 -5 -4 -3 -2 -1 0 1
t
x3
Figure 13. Tracking of state x3.
The above figure 7 shows the stabilization process of
chaotic state x1 with unknown parameters
The above figure 8 shows the stabilization process of
chaotic state x2 with unknown parameters
The above figure 9 shows the stabilization process of
chaotic state x3 with unknown parameters
The above figure 10 shows the stabilization process of
chaotic state x4 with unknown parameters
Without loss of generality, set the desired value as 1.
Consider that
a b c d
, , ,
are unknown constants, using
the method proposed in this paper, the simulation result is
as below figure 11, figure 12, figure 13 and figure 14.
The below figure 11 shows the tracking process of
chaotic state x1 with unknown parameters.
The above figure 12 shows the tracking process of
chaotic state x2 with unknown parameters.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 0
2 4 6 8 10 12
t
x4
Figure 14. Tracking of state x4.
The above figure 14 shows the tracking process of
chaotic state x4 with unknown parameters.
So the tracking of chaotic system can be realized
ideally and good performance is achieved by the above
method.
VI.
C
ONCLUSIONSThe tracking of a four dimension super chaotic system
with unknown parameters and uncertain static functions
is researched in this paper and a robust adaptive tracking
law is designed according to the Lyapunov stability
theorem. Especially, the multi-unknown functions and
parameters are solved by designing of adaptive turning
law.
A
CKNOWLEDGMENTThe authors wish to thank their friend Heidi in Angels
(a town of Canada) for her help , and thank Amado for
his many helpful suggestions.
R
EFERENCES[1] Junwei Lei, Xinyu Wang, Yinhua Lei, Physics Letters A,Available online 7 February 2009
[2] Junwei Lei, Xinyu Wang, Yinhua Lei, A Nussbaum gain adaptive synchronization of a new hyperchaotic system with input uncertainties and unknown parameters, Communications in Nonlinear Science and Numerical Simulation, Available online 24 December 2008
[3] Xinyu Wang, JunweiLei,Trigonometric RBF Neural Robust Controller Design for a Class of Nonlinear System with Linear Input Unmodeled Dynamics[J]. Applied Mathmatical and Computation,185 (2007) 989–1002 [4] Manfeng Hu, Zhenyuan Xu,Rong Zhang, and Aihua Hu,
“Parameters identification and adaptive full state hybrid projective synchronization of chaotic (hyper-chaotic) systems,” Physics Letters A, 361(2007) , pp. 231-237 [5] Tiegang Gao, Zengqiang Chen, Zhuzhi Yuan, and
Dongchuan Yu, “Adaptive synchronization of a new hyperchaotic system with uncertain parameters,” Chaos, Solitons and Fractals 33(2007) ,pp.922-928
[6] E.M.Elabbasy, H.N.Agiza, M.M. El-Dessoky, Adaptive synchronization of a hyperchaotic system with uncertain parameter, Chaos, Solitons and Fractals 30(2006) 1133-1142.
[7] Fang Tang, Ling Wang, An adaptive active control for the modified Chua’s circuit, Physics Letters A ,346(2005) pp.342-346.
[8] Zheng-Ming Ge, Cheng-Hsiung Yang, Pragmatical generalized synchronization of chaotic systems with uncertain parameters by adaptive control, Physica D ,231(2007),pp.87-89
[9] Gauthier, J. P, Hammouri, H, & Othman, S. (1992). A simple observer for nonlinear systems, applications to bioreactors. IEEE Transactions on Automatic Control, 37, 875–880.
[10]Khalil, H. K., & Saberi, A. (1987). Adaptive stabilization of a class of nonlinear systems using high-gain feedback. IEEE Transactions on Automatic Control, 32, 1031–1035 [11]Hao Lei,Wei Lin,Universal adaptive control of nonlinear
systems with unknown growth rate by output feedback,Automatica 42 (2006) 1783-1789
[12]Hao Lei,Wei Lin,Adaptive regulation of uncertain nonlinear systems by output feedback: Auniversal control approach , Systems & Control Letters 56 (2007) 529– 537 [13]Wang-Long Li, Kuo-Ming Chang, Robust synchronization of drive–response chaotic systems via adaptive sliding mode control, Chaos, Solitons and Fractals (2007) 321–
324
[14]Nussbaum, R. D. (1983). Some remarks on the conjecture in parameter adaptive control. Systems and Control Letters, 3(3), 243–246
[15]Ye, X. D., & Jiang, J. P. (1998). Adaptive nonlinear design without a prioriknowledge of control directions. IEEE Transactions on Automatic Control, 43(11), 1617–1621. [16]Alexander L.Fradkov, A Yu.Markov. Adaptive
synchronization of chaotic system phased on speed gradient method and passification. IEEE Trans on Circuit Syst.(I),1997,44(10):905-912
[17]Young_Hoon Joo, Leang-San shieh, Guangrong Chen, Hybrid state-space fuzzy model-based controller with dual-rate sampling for digital control of chaotic systems, IEEE Trans on Fuzzy Syst.(I),1999,7(4):394-408
[18]Alexander Pogromsky, Henk Nijmeijer. Observer-based robust synchronization of dynamical systems. Int,J. Bifurcation and Chaos,1998,8(11):2243-2254
[19]E.M.Elabbasy,H.N.Agiza,M.M.El-dessoky.Adaptive synchronization of lv System with uncertain parameters. Chaos,solitons and fractals. 2004,(21):657-667
[20]M.T.yassen. Adaptive synchronization of Rosser and lü systems with fully uncertain patameters. Chaos,solitons and fractals.2005,(23):1527-1536
[21]Ju H.Park. Adaptive sysnchronization of Rossler system with uncertain Parameters.Chaos, solitons and fractals.2005,(22):1-6.
[22]T.L. Liao,Adaptive synchronization of two Lorenz system.Chaos.solitons and fractals.1998,9(9):1555-1561 [23]Yongguang Yu , Suochun Zhang, Adaptive backstepping
synchronization of uncertain chaotic system[J], Chaos, Solitons and Fractals 21 (2004) 643–649
[24]M.T. Yassen,Adaptive chaos control and synchronization for uncertain new chaotic dynamical system[J],Physics Letters A 350 (2006) 36-43
[25]Awad El Gohary, Rizk Yassen,Adaptive control and synchronization of a coupled dynamic system with uncertain parameters [J],Chaos, Solitons and Fractals 29 (2006) 1085-1094
[27]Rongwei Guo ,A simple adaptive controller for chaos and hyperchaos synchronization,Physics Letters A,360 (2009) 38-53
[28]Wei Lin,Adaptive chaos control and synchronization in only locally Lipschitz systems,Physics Letters A 372 (2008) 3195-3200
[29]Jian Huang,Adaptive synchronization between different hyperchaotic systems with fully uncertain parameters,Physics Letters A 372 (2008) 4799-4804
[30]Ju H. Park, S.M. Lee, O.M. Kwon,Adaptive synchronization of Genesio-Tesi chaotic system via a novel feedback control,Physics Letters A 371 (2007) 263-270
[31]Xianyong Wu , ZhiHong Guan, Zhengping Wu,Adaptive synchronization between two different hyperchaotic systems ,Nonlinear Analysis 68 (2008) 1346-1351
[32]Ming-Chung Ho, Yao-Chen Hung, Zhi-Yu Liua, I-Min Jiang, Reduced-order synchronization of chaotic systems with parameters unknown, Physics Letters A 348 (2006) 251-259
[33]Jui-Sheng Lin, Jun-Juh Yan, Adaptive synchronization for two identical generalized Lorenz chaotic systems via a single controller, Nonlinear Analysis: Real World Applications, 68 (2008) 1346-1351
[34]Tsung-Ying Chiang, Jui-Sheng Lin ,Teh-Lu Liao, Jun-Juh Yan, Anti-synch -ronization of uncertain unified chaotic systems with dead-zone nonlinearity , Nonlinear Analysis 68 (2008) 2629-2637
[35]Her-Terng Yau, Jun-Juh Yan ,Chaos synchronization of different chaotic systems subjected to input nonlinearity,Applied Mathematics and Computation 197 (2008) 775–788
[36]Jian Huang,Adaptive synchronization between different hyperchaotic systems with fully uncertain parameters,Physics Letters A 372 (2008) 4799-4804
[37]Ju H. Park, S.M. Lee, O.M. Kwon,Adaptive synchronization of Genesio-Tesi chaotic system via a novel feedback control,Physics Letters A 371 (2007) 263-270
[38]Xianyong Wu , ZhiHong Guan, Zhengping Wu,Adaptive synchronization between two different hyperchaotic systems ,Nonlinear Analysis 68 (2008) 1346-1351
[39]Ming-Chung Ho, Yao-Chen Hung, Zhi-Yu Liua, I-Min Jiang, Reduced-order synchronization of chaotic systems with parameters unknown, Physics Letters A 348 (2006) 251-259
[40]Jui-Sheng Lin, Jun-Juh Yan, Adaptive synchronization for two identical generalized Lorenz chaotic systems via a single controller, Nonlinear Analysis: Real World Applications, 68 (2008) 1346-1351
[41]Tsung-Ying Chiang, Jui-Sheng Lin ,Teh-Lu Liao, Jun-Juh Yan, Anti-synch -ronization of uncertain unified chaotic systems with dead-zone nonlinearity , Nonlinear Analysis 68 (2008) 2629-2637
[42]Her-Terng Yau, Jun-Juh Yan ,Chaos synchronization of different chaotic systems subjected to input nonlinearity,Applied Mathematics and Computation 197 (2008) 775–788
[43] Haitao Yu , Jiang Wang , Bin Deng, Adaptive backstepping sliding mode control for chaos synchronization of two coupled neurons in the external electrical stimulation ,[J] Commun Nonlinear Sci Numer Simulat 17 (2012) 1344-1354
[44]Chao-Lin Kuo, Design of a fuzzy sliding-mode synchronization controller for two different chaos systems, Computers and Mathematics with Applications 61 (2011) 2090–2095
[45]Tsung-Ying Chiang, Jui-Sheng Lin Teh-Lu Liao, Jun-Juh Yan, Antisynch -ronization of uncertain unified chaotic systems with dead-zone nonlinearity , Nonlinear Analysis 68 (2008) 2629–2637, Physics Letters A 350 (2006) 36–43 [46]Rong-An Tang , Ya-Li Liu , Ju-Kui Xue , An extended
active control for chaos synchronization, Physics Letters A 373 (2009) 1449–1454
[47]Pei Xinzhe, Liu Zhiyuan, Pei Run, Robust trajectory tracking controller design for mobile robots with bounded input, [J] Acta automatica sinica, 2003,29(6):876-881 [48]Gao Ping Jing et al. A simple global synchronization
criterion for coupled chaotic systems. Solitons and fractals. 2003,(15):925-935
[49]Jianping Yan, Changpin Li. On synchronization of three chaotic systems. Chaos,Solitons and fracrals.2005,(23):1683-1688
[50]C.Sarasola,F.J.Torrealdea,A.D Anjou. Feedback synchronization of chaotic Systems[J].Int.J.Bifurcation and chaos.2003,13(1):177-191
[51]M.T.Yassen.Chaos synchronization between two different chaotc systems using active control.Chaos,Solitons & Fractals.2005:23(4):131-140
[52]H.N.Agiza,M.T.Yassen. Synchronization of Rossler and Chen chaotic dynamical systems using active control.Physics Letters A.2001,(278):191-197
[53]Ming-chung Ho, Yao-Chen Hung.Synchronization of two different systems by Using generalized active control. Physics Letters A.2002,(301):424-428.
[54]Jiang G.P., Tang K.S. A global synchronization criterion for coupled chaotic systems via unidirectional linear error feedback approach. Int. J. Bifurcation Chaos, 2002, 12(10):2239-2253
Yuqiang Jin was born in Hengshui, Hebei province of China in 1977. He received the B. Eng degree in Electronic Automation and the Master Degree in Control Theory and Control Engineering from Naval Aeronautical Astronautical University, Yantai of China in 2000 and 2003 respectively. After that he continued his study there and received the Doctor degree in Guidance , Control and Navigation in 2006 .
He worked in NAAU as an assistant teacher in 2003 and became a lecture in 2005. In 2008, he was promoted to be a vice professor. His present interests are chaotic system, aircraft control and neural networks.
Junwei Lei was born in Chibi, Hubei province of China on 9th Nov, 1981. He received the B. Eng degree in Missile Control and Testing and the Master Degree in Control Theory and Control Engineering from Naval Aeronautical Astronautical University, Yantai of China in 2003 and 2006 respectively. After that he continued his study there and received the Doctor degree in Guidance, Control and Navigation in 2010.
He worked in NAAU as an assistant teacher in 2009 and became a lecture in 2010. His present interests are neural networks, chaotic system control, variable structure control and adaptive control.
Yong Liang was born in Yantai, Shandong province of China on Nov, 1976. He received the B. Eng degree in Aeronautical Electronic Device and the Master Degree in Control Theory and Control Engineering from Naval Aeronautical Astronautical University, Yantai of China in 1998 and 2001 respectively. After that he continued his study and received the Doctor degree in Guidance , Control and Navigation in 2010 from The Second Artillery Engineering College in Xian of China .