ISSN: 2008-6822 (electronic)
https://dx.doi.org/10.22075/IJNAA.2019.4178
A Novel Robust Hierarchical Consensus Algorithm
with Application in DC Nanogrids Coordination
Ahmadreza Ghaznavi, SMT Almodarresi
Faculty of Electrical Engineering, Yazd University, Yazd, Iran
Abstract
This research investigates the delay sensitivity of discrete-time consensus among agents which com-municate over a scale-free network with hubs. In this paper, a novel hierarchical consensus algo-rithm, based on the idea of virtual communication graph degree reduction, is proposed. As a result, a significant consensus speed gain is obtained which provides a potential time margin for apply-ing cyber-physical techniques that cause systematic input delay. This approach provides robustness and resiliency in case of any communication topology disturbance during cyber- physical attacks or plug-and-play events. The feasibility of plug- and-play, which has the potential to increase the input delay, is presented based on the gained margin as a sample scenario. The algorithm application in the coordination of distributed photovoltaic resources of several nano-grids communicating over a scale-free network, is assessed via simulation as well.
Keywords: Discrete-time consensus, delay, DC nano-grid, hierarchical control, multi-agent system, network with hub, plug- and-play, robust/resilient consensus, scale-free network.
2010 MSC: 68M10
1. Introduction
The multi-agent system (MAS), as a type of distributed intelligent structure, is an active area of research in computer science and technology. However, control and communication engineering apply MAS idea to develop cyber-physical systems in smart grid as well [1, 2, 3].
Agents’ coordination, within a MAS, is one of the most important requirements for which var-ious methods have been proposed. However, distributed cooperative consensus is one of the most significant ones [4]. DC Micro-grid (DCMG) and DC nano-grid (DCNG) [5] are the most attended subsystems in the smart grid to build future open energy systems [6, 7, 8]. Photo voltaic distributed energy resource (PV-DER) penetration is a challenge which has been considered in researches so far
∗Corresponding author
Email address: [email protected](SMT Almodarresi)
[9]. In the same vein, PV-based DCNG aggregation is implied as a trending penetration solution [10]. Hence, DCMG/DCNG control, with proper strategies, architectures, and various objectives, have been studied in recent researches. A comprehensive review of DCMG control has come in [11]. The hierarchical structure is an important DCMG control architecture with different tactics and objectives at each hierarchy; which have been studied and reviewed in [12]. Primary level provides a local power control at each distributed generation unit (DGU), secondary layer is designed to realize the intra-MG agreements on technical set-points, and tertiary level is assigned with the inter-MGs orchestration on technical or non-technical policies and requirements.
Distributed cooperative control based on consensus are attended significantly in micro-grids sec-ondary and tertiary control levels [13, 14]. In fact, this approach is extremely beneficial to realize DER coordination while considering scalability, reliability and resiliency requirements in spite of communication and computation resources constraints [15]. Voltage restoration and current sharing are the major secondary control objectives. Leader-following (tracking) and leaderless (regulation) consensus are the main approaches for voltage restoration and current sharing respectively [16, 17, 18]. An important consensus performance problem is communication processing delay in agents’ infor-mation exchange process, known as input delay. Systematic delay variations, caused by intended or unwanted topology changes, can be considered as disturbing events. Hence, robustness and resiliency become important problems in this context. In fact, power system resiliency, as defined in [19], is still an open research area in DCMG distributed control [20].
On the other hand, an original research showed that continuous-time synchronous consensus is more fragile to increased input delay while MAS agents communicate over a scale-free networks [21]. Thus, the discrete-time consensus (DTC) robustness analysis to delay seems to be an open problem which is addressed in this paper. The scale-free network were introduced as a network with hubs whose degrees are much larger than the average degree of the network graph. In other words, the graph degree has power-law distribution in these networks as P(k) ∝ k−γ,0 < γ < 3 [22]. Smart grid neighborhood-area-network communication has been recently considered as an example in which scale-free networks can be addressed [23]. This idea can specially be applicable in DCNGs required coordination for aggregation. This application is considered in this paper
In total, the main contribution of the current study is the formulation and proposal of an inno-vative hierarchical consensus with the goal of decreasing algorithm sensitivity to systematic delay variations, especially in the case of MAS communication over a scale-free network. The proposed hi-erarchical synchronous consensus algorithm is developed based on considering different clusters with a hub agent as leader. Then first consensus hierarchy is done with an intra-cluster leader-following approach. The secondary level, called as inter-cluster consensus, is performed in a cluster among hubs, with a leader-less approach.
In fact, the proposed scheme robustness would be the result of a virtual decrease in network graph degree which increases the overall consensus speed versus traditional non-hierarchical flat scheme as well. Hence, the obtained time margin, based on the proposed scheme, is introduced as a resiliency provision capacity. In other words, this time tolerance facilitates the application of required resiliency mechanisms. Here, a plug-and-play (PnP) scenario is considered in which topology variation causes input delay increase. The robustness of the hierarchical scheme is assessed rather to flat consensus over the whole graph. Another contribution of this paper is the application of the proposed scheme in a practical scenario of forming a DCMG through the coordinated aggregation of several DCNGs with PV-DERs.
capacity in the proposed consensus in section III.b. In section IV, DCNG cyber-physical system (CPS) model is introduced first. Then, the proposed scheme assessment, its application evaluation for DCNGs coordination, and a PnP scenario to show the resiliency capacity are presented. Conclusions and future work are discussed in section V.
2. Preliminaries and Problem Statement
2.1. Preliminaries
Notations: A MAS withNT communicating agents is modeled as an undirected connected graph G. The graph nodes represents the agents and its edges shows their bilateral network connections. The graph adjacency matrixAis defined withaij elements as 1 whenith andjthagents are connected
and 0 otherwise. Laplacian Matrix L is defined as L =D−A where D is a diagonal matrix with di =
P
i6=jaij elements and is called the degree matrix. Ni shows the set of neighbors for agent i. λi(L) is considered as the ith largest eigenvalue for L. Moreover, x(k) is a column vector which
contains xi(k) elements as the states of ith agent at kth step. The spectral radius of a matrix is
defined as the maximum absolute of its eigenvalues and is represented with the operator ρ(.)
A review on synchronous DTC without delay: Consensus taxonomy includes asymptotic or finite-time, intermittent or a-periodic (event-triggered,self-triggered), average or scaled (propor-tional), leader-less or leader-following and discrete-time or continuous-time approaches. A single or combination of these approaches are considered in the context of MAS types such as linear or nonlinear, heterogeneous or homogeneous and cyber-physical ones [24].
A DTC is claimed to be more compatible and bandwidth-efficient with the nature of measure-ments, communications and digital control in spite of more required concern about the overall sta-bility.
Fast distributed linear averaging(FDLA) is one of the basic iterative algorithms of synchronous consensus [25]. Discrete-time version of this algorithm has been shown to be a Markov chain and be applicable in dynamic load balancing of similar-structure parallel systems [21]. This algorithm is formulated as:
xi(k+ 1) =xi(k) + X
j∈Ni
aij(xj(k)−xi(k)) (2.1)
consensus step size parameter is which can be a tuning weight for the algorithm. In [21], it is shown that the collective dynamic of defined consensus in (2.1) can be written as:
x(k+ 1) = (I−L)x(k) = Px(k) (2.2)
The Perron matrix of the network graph, with parameter, is defined asP=I−L. This matrix is a valid transition matrix for the Markov chain of the iterative consensus. It has turned out in [25] that limk→∞Pk = 1/NT 11T
, where1T is a row vector of ones defined as [11· · ·1]
1×NT. Hence, the group decision becomes the average value of all agents if and only if (iff)Psatisfies below conditions at the same time:
1TP=1T (2.3)
P1=1 (2.4)
ρ(P−(1/
NT)11T)<1 (2.5)
It is shown in [21] that these conditions require the graph to be strongly connected and 0< ≤
element. Asymptotic and per-step convergence factors are introduced to evaluate the consensus speed respectively as [25]:
r1 = sup
x(0)6=¯x
lim
t→∞(kx(t)−x¯k2/kx(0)−x¯k2)
1/t
(2.6)
r2 = sup
x(t)6=¯x
kx(t+ 1)−x¯k2/kx(t)−x¯k2 (2.7)
In [25], it has been turned out thatr1 andr2 are equal toρ(P−(1/NT)11T) andP−(1/
NT)11T
2
for this type of graph respectively. The consensus settling event which shows the asymptotic expo-nential decrease of error by factor e−1 happens after K
s = 1/Ln(1/r1) steps as well. Moreover,
some heuristic solutions are described to find the range of to guarantee the convergence, or to find the optimum value of that for the fastest convergence. One solution determines b for the fastest
convergence as:
b = min(1/∆,2/(λ1(L) +λNT−1(L))) (2.8)
Remark 1. It should be noted that the formulated FDLA consensus has an intrinsic assumption for the step interval, Tca, as to be larger enough than the maximum required communication and
processing time among ith and jth agent defined as T
max(i, j). Hence, an agent’s current state
is calculated from the last step state information of its own and neighbors. Therefore, the total consensus time can also be calculated as Tca.Ks.
2.2. DTC with Delay Speed and Delay Robustness Analysis
In contrary to the condition described in Remark.1, in the case thatTca is less thanT, whileT is
greater than Tmax(i, j), it can be considered that the neighbors’ state information is available after kτ =int(T /Tca) steps. Therefore, the consensus for the ith agent can be formulated as:
xi(k+ 1) =xi(k)
+X j∈Ni
aij(xj(k−kτ)−xi(k−kτ)) (2.9)
Hence, the collective dynamic can be defined asx(k+ 1) =x(k)−Lx(k−kτ) based on (2.9) as
well.
A basic analysis of continuous-time consensus with communication delay which is formulated as ˙
x(t) =−Lx(t−τ), was presented in [21]. Then, a MIMO transfer functionH(s) = (In+ (1/s)e−sτL)
−1
was extracted by taking the Laplace transform. Where, the system response was obtained by
X(s) = (H(s)/s )x(0). Based on this approach, convergence analysis reduced to stability inves-tigation for a MIMO system. By verifying Nyquist stability criterion ofH(s) developed in [26], delay for average-consensus algorithm has been turned out to beτ < π/(4∆) . Hence, It is concluded that networks containing hubs, are less robust to the time delay while achieving consensus.
Similar to the continuous-time approach, a Nyquist analysis can be done for DTC as well. A transfer function H(z) = (In+Lz−kτ/z−1 )
−1
obtained from Z-transform of x(k + 1) = x(k)−
Lx(k−kτ), is considered. Stability is assured iff all zeros of H(z) are located inside the unit circle
of the z-plane. Taking similar steps in [26], zeros exceptz = 1, satisfy the below equation:
1 +λk(L).z−kτ/z−1 = 0 (2.10)
Proof. Using (2.10), stability criterion implies if the net encirclement of the Nyquist plot of Γ = λk(L).z−kτ/z−1 around −1 is zero for k > 1, then all zeros are inside the unit circle. By
substituting z= exp(jω), the real part of Γ is calculated as:
<(Γ) =−1
2λk(L)
sin(ωkτ +ω/2 )
sin(ω/2 ) (2.11)
The real part minimum,<min(Γ) = −(kτ+0.5)λ1(L), can be set greater and equal to−1. Hence,
the Nyquist criterion is surely satisfied and the upper bound for allowed kτ is extracted as:
kτ ≤1/λ1(L)−0.5 (2.12)
Corollary 1. The eigenvalues of a symmetric positive semi-definite matrix are real and non-negative as 0 = λn ≤ λn−1 ≤ · · · ≤ λ1 ≤ 2∆ while their maximum is equal to the 2-norm of the
matrix [27]. SinceL is symmetric positive semi-definite, it is clear that λ1(L) = kLk2. hence, (2.12)
can be rewritten as kτ ≤1/kLk2−0.5. It can be concluded that the sufficient consensus condition
is:
2kτ+ 1 ≤1/∆ (2.13)
Remark 2: A discussion on DTC speed limit due to ∆ is given here. As expressed in preliminaries, the convergence factors defined in (2.6) and (2.7) introduce the smaller spectral radius or 2-norm of
P−(1/
NT)11T as the indicator of a faster consensus. According to sub-multiplicity of norms for two arbitrary matrices,A andB which giveskABk2 ≤ kAk2kBk2, and the inequalityρ(A)≤ kAk2 [28], an upper bound for the spectral radius is extracted as P−(1/
NT)11T
2 ≤ kPk2
I−(1/
NT)11T
2.
Lemma 1. The 2-norm of I−(1/
NT)11T is one for all NT. Proof. by Defining A = I−(1/
NT)11T and considering that A is idempotent, AA = A, it is concluded that kAk2 = pλmax(A∗A) =
p
λmax(A) [?]. On the other hand, the unitary matrix
(1/
NT)11T has NT −1 zero and an eigenvalue as one. Hence, A has NT −1 eigenvalues equal to one
and just an eigenvalue az zero. On the other word, kAk2 = 1.
Corollary 2. According to Lemma 1, the upper bound for the convergence factor is kPk2. Since L is symmetric positive semi-definite which results in PTP = PPT, P is a normal matrix and kPk2 = max|λ(P)| [28]. According to corollary 1, it is concluded that max|λ(P)| ≤ 2∆−1. Hence, the spectral radius is upper-limited with the increase in ∆. It means that the maximum speed decreases in networks with higher ∆.
2.3. Problems Statement
Corollary 1 justifies the continuous-time analysis about robustness to delay. It shows that a synchronous consensus, with a certain step size, is less robust to information exchange and commu-nication processing delay which cause input delay, kτ, over a network with larger ∆. On the other
hand, Corollary 2 implies that the largest consensus speed is less with larger ∆. Hence, any event such as PnP or cyber-physical attacks that results in hub degree increase can threaten the consensus robustness and speed. In the next section, a novel 2-level consensus is proposed as a solution that decreases hub degrees virtually and yields more robustness to delay and higher possible speed.
3. Hierarchical DTC Proposal and Analysis
3.1. Hierarchical DTC formulation and analysis
Assumptions: (1) a connected network graph (G with Laplacian L) of NT agents exists in
with Laplacian Lc), (2) ith hub is the leader and first agent in its cluster which makes a connected
sub-graph (Gi with its Ni −1 neighbors with Laplacian Li) , (3) all agents are reachable within
only one cluster which shows NT =NcNi, (4) proposed scheme includes intra-cluster primary level
leader-following consensus and inter-cluster secondary level leader-less consensus among hubs, (5) maximum required communication plus processing time and synchronous consensus period inside the clusters (primary level) and among them (secondary level) are considered respectively as Tl1,Tl2
and Tca,l1, Tca,l2 and (6) it is assumed that Tca,l1 =Tca,l2 but Tl1 is less and equal to the Tl2 which is
logical in networks with longer range among hub agents than clusters’ ranges. Therefore, two cases are considered in this paper. The former happens whenTl2 < Tca,l1 that shows not-delayed consensus
at both levels (kτ = 0) and the latter occurs at Tl1 < Tca,l1 < Tl2 that causes not-delayed at primary
and delayed consensus (with kτ =int(Tca,l1/Tl2) at secondary level.
Remark 3. By defining xi,j as the state of jth agent in the ith cluster at kth step, a vector of
states as x= [x1,1,· · · , xi,j,· · · , xNc,NNc], a block diagonal matrix with diagonal elements of iLi as ¯
L, and the extension ofcLchow it presents the weighted Laplacian for a same graphGbut only with
edges among hubs as ¯Lc, the collective dynamic for the proposed consensus scheme can be derived
as:
x(k+ 1) = (I−L¯)˜x(k),P1 = (I−L¯)⇒
˜
x(k) = x(k)−L¯cx(k−kτ) x(k+ 1) =P1x(k)−P1L¯cx(k−kτ)
(3.1)
Proposition 2. The proposed hierarchical scheme for kτ = 0 is consensusable and can be faster
than not-delayed flat consensus if c∆c≤1,(2c∆c−1)≤ρmin(P) for the cluster among hubs and i∆i ≤1,(2i∆i−1)≤ρmin(P) forithcluster (i= 1 : Nc).
Proof. In the case kτ = 0, the proposed consensus transforms to x(k+ 1) = P1(I−L¯c)x(k).
Hence, consensusability can be assessed by the investigation of conditions implied in (2.3) to (2.5) for ¯P = (I−L¯)(I−L¯c). As ¯L and ¯Lc are symmetric semi-positive definite, 1T.L¯, 1T.L¯c, ¯L.1 and
¯
Lc.1 give zero matrices. Therefore conditions (2.3) and (2.4) are satisfied certainly. To investigate
the satisfaction of (2.5), the upper bound of the spectral radius ρ( ¯P−1/
NT11T) must be less than and equal to one. According to lemma 1 and remark 2, ρ(P¯) ≤
P¯
2 ≤
I−L¯
2
I−L¯c
2.
Considering assumptions i∆i ≤ 1 for i= 1 :Nc and c∆c ≤ 1, (2.3) to (2.5) are satisfied for
all subgraphs Gi and Gc. Hence, it is concluded that I−L¯
2 and
I−L¯c
2 are less and
equal to one which results in ρ(P¯) ≤ P¯
2 ≤ 1. Since the condition of (2.5) is satisfied as
well, the consensusability is proved. On the other hand, I−L¯ and I−L¯c are normal, thereby
I−L¯
2
I−L¯c
2 ≤imax=1:N
c
(2i∆i−1)·(2c∆c−1) is clear with a similar reasoning in corollary
2. Therefore, it is understood that max
i=1:Nc
(2i∆i−1) and (2c∆c−1) are both two upper bounds
of ρ(P¯). These upper bounds can give the cluster step sizes for faster convergence than perform-ing the fastest non-hierarchical consensus over the whole graph with a Perron matrix P = I−L
and a step size calculated from (2.8) if the objective is set to ρmax(P¯) ≤ ρmin(P). Considering
ρmin(P) = λ1(L)−1|= 2/(λ1(L) +λNT−1(L)), this objective is translated to two inequalities as:
(2c∆c−1)≤ρmin(P)
(2i∆i−1)≤ρmin(P), i= 1 : Nc
(3.2)
Proposition 3. The proposed hierarchical scheme forkτ 6= 0 is consensusable with higher upper
Proof. Applying the consensusability assessment method of system stability analysis, the MIMO transfer function is obtained by taking z-transform from (3.1) that yields (z−1)−1H−1(z) =F(z) =
I+L¯(z−1) + (I−L¯)L¯cz−kτ
(z−1). Having all zeros of F(z) inside the unit circle assures the system stability or consensusability. To verify this, the Nyquist examination is performed on Γ(z) which is acquired by multiplying ωr
m[(L¯c)]T from right side and ωnl(L¯) from left side to F(z) as mth
right andnth left eigenvectors ofL¯
candL¯ respectively. considering thatF(z) andωln(L¯)TF(z)ωmr(L¯c)
have same zeros and remarking the lemma that left eigenvalues of symmetric matrices are the same as its right eigenvalues [?], it is procured that 1 + Γ(z) = 0 while Γ(z) = λn(L¯)/(z − 1) + (1− λn(L¯))λm(L¯c)z−kτ/(z−1)). Similar to the ratiocination in proposition 1 proof, Nyquist criterion is
certainly satisfied if −1≤min<(Γ(z)). Replacing z =eiω in Γ(z), it is concluded that:
<(Γ) =−1
2
λn(L¯) +W λm(L¯c) 1−λn(L¯)
W = sin(kτω+ 0.5ω)/sin(0.5ω)
(3.3)
By defining Y =λn(L¯) +W λm(L¯c) 1−λn(L¯)
, inequality −1≤min<(Γ(z)) is verified by Ymax≤
2. Since ∂Y.∂λ¯L∂λ¯Lc = ∂Y .
∂λ¯Lc∂λ¯L =−W , Y is absolutely declining as eigenvalues increase and
the Ymax can occur for Wmax = 2kτ + 1 at four boundary points of the maximum and minimum of
¯
L and ¯Lc eigenvalues. According to the assumptions ∆ ≤ 1 for all clusters and proposition 2, it is deduced for 2 boundary points that Ymax(λmax( ¯L), λmax/min( ¯Lc)) ≤ 1 which satisfies the Nyquist
criterion. Therefore, the maximum at minλn( ¯L) = miniλNi−1(Li) fori= 1 :NcandλNc−1( ¯Lc) must be assessed. SinceYmax ≤1 satisfies the Nyquist criterion as well, a tighter upper bound for allowed
input delay is extracted through assessment askτ ≤0.5(λmin−1 ( ¯Lc)−1). According to corollary 1 and
the semi-positive definite symmetric feature for ¯Lc, it can be implied that:
kτ ≤0.5(λ−11( ¯Lc)−1)≤0.5(λ
−1
Nc−1( ¯Lc)−1) (3.4)
Corollary 3. The upper bound for allowed input delay is mainly defined by the hubs cluster graph Laplacian norm. This restriction is certainly looser than upper bound with performing flat type consensus because of the less degree of ¯Lc than L. Hence, the robustness improvement is certainly
certified.
3.2. Time margin criterion definition
The definition of asymptotic consensus convergence factor was given in (2.7). In fact, It clarified the consensus settling event as the asymptotic exponential decrease of error by factor e−1 happens which occurs after Ks= 1/Ln(1/r1) steps.
A performance metric for the proposed consensus scheme can be defined due to the basic flat consensus which can be done over the whole graph as:
C =r1hierarchical
r1f lat (3.5)
This metric is desired to have the least value, less than one, to show the best speed and convergence performance. A resiliency margin can also be described as the difference between the number of needed steps for two algorithm to be converged and calculated as:
M = 1
.
4. Examples and Application Case
4.1. Hierarchical DTC performance
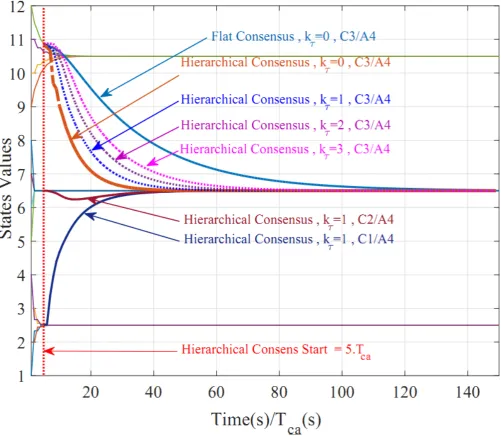
Assessment of the proposed hierarchical scheme is fulfilled within a MAS with twelve agents which make a network of three 4-agent clusters with loop, full mesh and bus topologies respectively. A full mesh inter-cluster topology is assumed as well. According to the power-law distribution with γ = 0.3, three hubs with degree=4 are introduced as the clusters’ leader. Flat not-delayed consensus is compared with hierarchical type forkτ = 0,1,2,3 according to differentTmax(i, j) and depicted on
Figure.1. Step sizes for intra-cluster and inter-cluster consensus satisfy the conditions implied in (3.2) and (3.4) respectively. Hence, the step sizes for the primary intra-cluster consensus are calculated from (2.8) as 0.3333, 0.25 and 0.5 respectively and the step size for inter-cluster level is considered as 0.6667. The maximum absolute value for eigenvalues is 0.8625 in the explained case while this value for a flat consensus over the whole graph, with the optimum step size from (2.8) as 0.2, is 0.9605.
The steps to achieve consensus for proposed hierarchical DTC in the sample topology, is calculated as 15.5664 which implies that the convergence is achieved after 16 steps. Similarly, the number of steps for the flat DTC over the whole graph is calculated as 57.1343 which determines that the convergence is achieved after 58 steps. The measured settling steps for the agent one in the first cluster through simulations are 20 and 70 for the proposed and basic methods respectively. It means that the convergence speed increases by applying the proposed method. These results are expected because in the proposed method, consensus are performed hierarchically through clusters with smaller hubs or equivalently matrices with less degrees.
The metric proposed in (3.5) is desired to have the least value less than one to show the best speed and convergence performance. Its value is 0.89 in the discussed sample case. The robustness margin is approximated as M = 58−16 = 42 and measured in simulations as M = 70−20 = 50 in the discussed case. Assuming the consensus average step time as Tca, the provided time gain
can be calculated as M · Tca. It seems that a sufficient margin is provided to perform various
compensation techniques to remediate risks like delay or communication failure by changing Tca.
The performance of the proposed hierarchical consensus is depicted on Figure.1. The comparison between the convergence speed of the algorithms reveals that hierarchical consensus provides faster consensus even in presence of delay that is interpreted as τ = kτ ·Tca in secondary inter-cluster
consensus. In fact, the hierarchical consensus enables coordination within a scale-free network with faster convergence than global flat consensus if the step sizes are selected properly for a known range of delays and inter-cluster topology.
4.2. Application Case: DCNGs Aggregation and PnP Robustness
In this part, proposed hierarchical discrete-time consensus algorithms are implemented within a simulated open energy network. This network is actually a DCMG created from the aggregation of PV-based DCNGs. Each DCNG is considered as a cluster and each PV-DER is assumed to be an agent inside that cluster. PV-DERs of each DCNG cooperate with each other to restore the voltage to a common reference and balance their sharing of current through secondary control based on the primary-level intra-cluster consensus. DCNG leaders communicate and coordinate with each other at the same time to achieve an overall balanced current sharing based on inter-cluster consensus. Finally, the performance of the proposed hierarchical scheme is compared with the flat one within a united DCMG of twenty PV-DERs.
Figure 1: Hierarchical consensus for a 12-agent MAS with three 4-agent clusters (C1:loop, C2:full mesh and C3:bus Cc:Loop) andkτ = 0,1,2,3.
control block. A total grid model can be obtained by discretization and integration of plant, control and consensus blocks. The overall model can be analyzed with Matlab linearization tool to find the controllers and consensus parameters for stability.
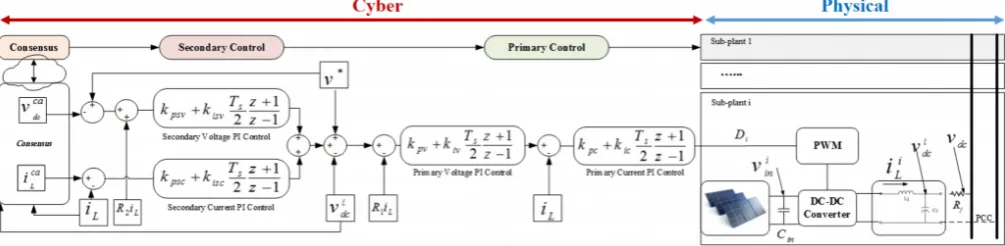
The sample open energy network includes twenty PV-DERs which are organized within four DCNG clusters. The degree distribution of graph topology is considered to be as power-law such that the overall DCMG is well-thought-out as a scale-free network. The system block diagram for a DCMG with fixed voltage distributed sources was introduced in [16]. Discretization and integration of different blocks in that model were clarified as well. Here, this basic model has been adopted which is depicted on Figure.2. Existing photovoltaic system module in MATLAB (2015.b) is used as distributed resource in the proposed system with 2*2 arrangement of 1Soltech 1STH-215-P mod-ules. This structure can produce 65 volt DC while panels temperature is 35◦C and irradiation is 1000W/m2. A common load R
Figure 2: PV-DER Block diagram as a cyber-physical system.
with resistances of (0.15×(k1 + 1) + 0.03×(k2 −1)) Ω, wherek1 is the cluster number andk2 is the
agent number in that cluster. The reference for voltage restoration is considered to be V∗ = 48v. Controllers are designed with parameters listed below the PI controllers on Figure.2 such that the settling time of response is realizable for the step time values from 1msto 1s.
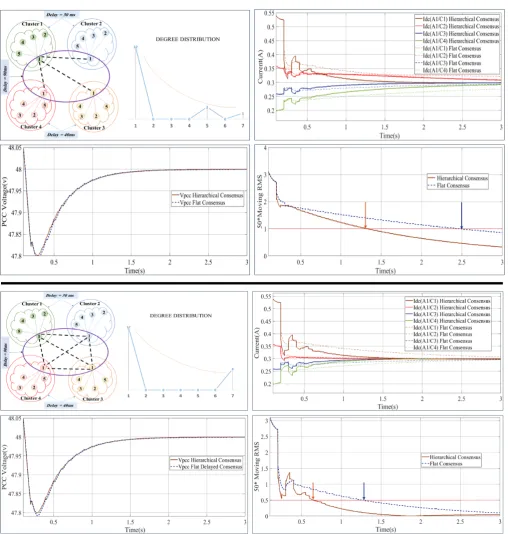
The topology of clusters are star such that the leader agent is at the center. Two cases of star and full-mesh topologies for inter-cluster communication are assumed to assess the performance of hierarchical consensus. Consensus step time Tca for intra-cluster consensus is considered equal to
90ms which is larger than the maximum intra-cluster communication and processing delays. The inter-cluster maximum delay is assumed to be 90ms, thereby inter-cluster consensus is of delayed type with kτ = 1. The step size is selected from (2.8) for intra-cluster and from (3.4) as 0.15 for
inter-cluster consensus.
Hierarchical DTC performance. The performance of PV-DERs coordination based on flat and not-delayed consensus is compared with the proposed hierarchical type to aggregate DCNGs. It is assumed that secondary control is activated at t= 0.2s based on decided references at each step from consensus algorithm. A globl consensus is expected by two approaches of flat and proposed hierarchical algorithms. The behavior and speed of algorithms are assessed through the simulations in two cases of star and full-mesh topologies for intra-cluster communications. The results are depicted on Figure.3. In both cases, continuous declining of moving RMS of two neighbors is less than 0.02 that shows the speed of the proposed algorithm is better. This improvement is achieved by degrading hubs degrees as neighbors in each cluster decreases virtually.
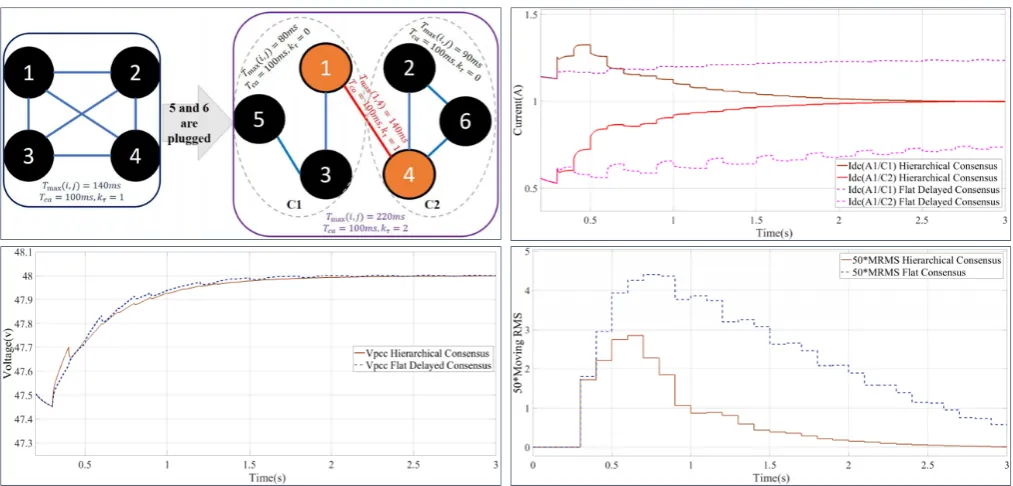
Plug and play support. Based on the proposed hierarchical consensus in section 3.1, an application case of plugging new PV-DERs to a DCNG is presented here. In this scenario, A DCNG includes four PV-DERs with full-mesh topology andTmax(i, j) = 140msat first such that not-delayed
consensus with Tca = 200ms or delayed consensus with Tca = 100ms, kτ = 1 works well. Then, two
new agents request to join the DCNG. The communal benefit would be smaller share of current for each agent with the cost of wider network size as Tmax(i, j) increases to 220msthat requires Tca to
be increased or delayed consensus with Tca = 100ms, kτ = 2 or Tca = 200ms, kτ = 1 is performed.
On the other hand, it is assumed that total allocated bandwidth must be constant, thereby number of communication links can not be changed. According to these assumptions, proposed hierarchical consensus is applicable with the structure depicted on Figure.4. In the adapted topology, two clusters with hub agents are arranged with maximum delay 80msand 90mssuch that intra-cluster consensus can be performed with not-delayed scheme and Tca = 100ms. Inter-cluster consensus with this step
length and the maximum delay among hubs as Tmax(i, j) = 140mswould be executed with delayed
scheme with kτ = 1 as well. Step sizes are also selected in regard to the propositions, 2 and 3.
Figure 3: Proposed consensus performance evaluation.
clusters’ leaders, the point of common coupling voltage, and the scaled moving RMS (by 50), which are plotted on Figure.4, show that the proposed scheme outperforms the delayed flat consensus with Tca = 100ms, kτ = 2. It is seen that the share of current decreases from 1.5A to 1A by plugging
the new agents. It is important to notice that a significant margin becomes available as resiliency capacity. According to a 50*MRMS=1 threshold, Tca can be increased up to 2.5 times in case of
Figure 4: Proposed consensus resiliency capacity in a plug-and-play scenario.
5. Conclusions and Future Works
This paper proposes a novel hierarchical discrete-time consensus for virtual hub degree reduction in a scale-free network. Theoretical analysis showed the potential input delay robustness and conver-gence speed improvements. A performance metric and a robustness margin are defined to compare hierarchical algorithm with flat type in achievement to a global consensus. The resiliency capacity of the proposed scheme to compensate the impacts of delay to support plug-and-play consensus were discussed. Finally, the application of the proposed algorithm in the coordination of nano-grids to form a larger micro-grid was presented. It seems valuable and recommended to continue research on the potential of the proposed this idea to improve robustness of different types of consensus algorithms according to other possible risky scenarios in the future works.
References
[1] Vitor N Coelho, Miri Weiss Cohen, Igor M Coelho, Nian Liu, and Frederico Gadelha Guimar˜aes. Multi-agent systems applied for energy systems integration: State-of-the-art applications and trends in microgrids. Applied Energy, 187:820–832, 2017.
[2] Md Shihanur Rahman, Md Apel Mahmud, Aman Maung Than Oo, and Hemanshu Roy Pota. Multi-agent approach for enhancing security of protection schemes in cyber-physical energy systems. IEEE transactions on industrial informatics, 13(2):436–447, 2017.
[3] Lefeng Cheng, Tao Yu, Xiaoshun Zhang, and Bo Yang. Parallel cyber-physical-social systems based smart energy robotic dispatcher and knowledge automation: Concepts, architectures and challenges. IEEE Intelligent Systems, 2018.
[5] Daniel Burmester, Ramesh Rayudu, Winston Seah, and Daniel Akinyele. A review of nanogrid topologies and technologies. Renewable and Sustainable Energy Reviews, 67:760–775, 2017.
[6] Mohsen Rafiee Sandgani and Shahin Sirouspour. Energy management in a network of grid-connected microgrids/nanogrids using compromise programming. IEEE Transactions on Smart Grid, 9(3):2180–2191, 2018.
[7] Annette Werth, Nobuyuki Kitamura, and Kenji Tanaka. Conceptual study for open energy systems: distributed energy network using interconnected dc nanogrids. IEEE Transactions on Smart Grid, 6(4):1621–1630, 2015.
[8] Seyyed Mostafa Nosratabadi, Rahmat-Allah Hooshmand, and Eskandar Gholipour. A compre-hensive review on microgrid and virtual power plant concepts employed for distributed energy resources scheduling in power systems. Renewable and Sustainable Energy Reviews, 67:341–363, 2017.
[9] Temitayo Olowu, Aditya Sundararajan, Masood Moghaddami, and Arif Sarwat. Future chal-lenges and mitigation methods for high photovoltaic penetration: A survey.Energies, 11(7):1782, 2018.
[10] Emilio Ghiani, Michele Garau, Gianni Celli, F Pilo, and G Marongiu. Smart integration and aggregation of nanogrids: Benefits for users and dso. In PowerTech, 2017 IEEE Manchester, pages 1–6. IEEE, 2017.
[11] Lexuan Meng, Qobad Shafiee, Giancarlo Ferrari Trecate, Houshang Karimi, Deepak Fulwani, Xiaonan Lu, and Josep M Guerrero. Review on control of dc microgrids and multiple microgrid clusters. IEEE Journal of Emerging and Selected Topics in Power Electronics, 5(3):928–948, 2017.
[12] Zhikang Shuai, Junbin Fang, Fenggen Ning, and Z John Shen. Hierarchical structure and bus voltage control of dc microgrid. Renewable and Sustainable Energy Reviews, 82:3670–3682, 2018.
[13] Van-Hai Bui, Akhtar Hussain, and Hak-Man Kim. A multiagent-based hierarchical energy management strategy for multi-microgrids considering adjustable power and demand response.
IEEE Transactions on Smart Grid, 9(2):1323–1333, 2018.
[14] Chunxia Dou, Dong Yue, Josep M Guerrero, Xiangpeng Xie, and Songlin Hu. Multiagent system-based distributed coordinated control for radial dc microgrid considering transmission time delays. IEEE Transactions on Smart Grid, 8(5):2370–2381, 2017.
[15] Mahmoud Saleh, Yusef Esa, and Ahmed Mohamed. Communication based control for dc mi-crogrids. IEEE Transactions on Smart Grid, 2018.
[16] Lexuan Meng, Tomislav Dragicevic, Javier Rold´an-P´erez, Juan C Vasquez, and Josep M Guer-rero. Modeling and sensitivity study of consensus algorithm-based distributed hierarchical con-trol for dc microgrids. IEEE Transactions on Smart Grid, 7(3):1504–1515, 2016.
[18] Michele Tucci, Lexuan Meng, Josep M Guerrero, and Giancarlo Ferrari-Trecate. Stable current sharing and voltage balancing in dc microgrids: A consensus-based secondary control layer.
Automatica, 95:1–13, 2018.
[19] Reza Arghandeh, Alexandra Von Meier, Laura Mehrmanesh, and Lamine Mili. On the defini-tion of cyber-physical resilience in power systems. Renewable and Sustainable Energy Reviews, 58:1060–1069, 2016.
[20] Shankar Abhinav, Hamidreza Modares, Frank L Lewis, and Ali Davoudi. Resilient cooperative control of dc microgrids. IEEE Transactions on Smart Grid, 2018.
[21] Reza Olfati-Saber, J Alex Fax, and Richard M Murray. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 95(1):215–233, 2007.
[22] Albert-L´aszl´o Barab´asi and Eric Bonabeau. Scale-free networks. Scientific american, 288(5):60– 69, 2003.
[23] Yuemin Ding, Xiaohui Li, Yu-Chu Tian, Gerard Ledwich, Yateendra Mishra, and Chunjie Zhou. Generating scale-free topology for wireless neighbourhood area networks in smart grid. IEEE Transactions on Smart Grid, 2018.
[24] Xiaohua Ge, Qing-Long Han, Derui Ding, Xian-Ming Zhang, and Boda Ning. A survey on recent advances in distributed sampled-data cooperative control of multi-agent systems. Neurocomput-ing, 275:1684–1701, 2018.
[25] Lin Xiao and Stephen Boyd. Fast linear iterations for distributed averaging. Systems & Control Letters, 53(1):65–78, 2004.
[26] Reza Olfati-Saber and Richard M Murray. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on automatic control, 49(9):1520–1533, 2004.
[27] Carl D Meyer. Matrix analysis and applied linear algebra, volume 71. Siam, 2000.