A Closed-Form Error Model of Straight Lines for
Improved Data Association and Sensor Fusing
Volker Sommer1,†*
1 Beuth University of Applied Sciences; [email protected]
† Current address: Luxemburger Str. 10, D-13353 Berlin
Abstract:Linear regression is a basic tool in mobile robotics, since it enables accurate estimation of
1
straight lines from range-bearing scans or in digital images, which is a prerequisite for reliable data
2
association and sensor fusing in the context of feature-based SLAM. This paper discusses, extends and
3
compares existing algorithms for line fitting applicable also in case of strong covariances between the
4
coordinates at each single data point, which must not be neglected if range-bearing sensors are used.
5
Besides, particularly the determination of the covariance matrix is considered, which is required for
6
stochastic modeling. The main contribution is a new error model of straight lines in closed form
7
for calculating fast and reliably the covariance matrix dependent on just a few comprehensible and
8
easily obtainable parameters. The model can be applied widely in any case when a line is fitted from
9
a number of distinct points also without a-priori knowledge of the specific measurement noise. By
10
means of extensive simulations the performance and robustness of the new model in comparison to
11
existing approaches is shown.
12
Keywords:linear regression; covariance matrix; data association; sensor fusing; SLAM
13
1. Introduction
14
Contour points acquired by active sensors using sonar, radar or lidar [1], or extracted from image
15
data [2][3], are a key source of information for mobile robots in order to detect obstacles or to localize
16
themselves in known or unknown environment [4][5]. For this purpose, often geometric features are
17
extracted from raw data since in contrast to detailed contours, features are uniquely described just
18
by a limited set of parameters and their extraction works as additional filtering in order to improve
19
reliability when dealing with sensor noise and masking [6]. However, the performance of feature based
20
localization or SLAM strongly depends on exact determination of a feature vectoryfrom measured
21
raw data. Moreover, especially for data association as well as for sensor fusing not only the feature
22
parameters are needed, but also a reliable estimation of their covariance matrixRis required, which
23
encapsulates the variances of the single elements inyand their dependencies.
24
This will be obvious if one looks at the standard algorithm for updating an estimated system state
25
ˆ
xtypically by means of EKF, compare [7][8][9]: New measurementsyare plausible if their deviations
26
from expected measurements ˆy=h(x)ˆ dependent on the in general non-linear measurement model
27
h(x)ˆ is within a limited range. For exact calculation of this limit usually the Mahalanobis-metric
28
is applied, see [8][10], which considers the covariance matrixSof the innovationν = y−yˆwith 29
S=R+H·Pˆ·HTdependent onR, the covariance matrix ˆPof the system state and usingH=∇h(x)ˆ .
30
A new measurementywill be considered to relate to an already known feature vector ˆyif its distance
31
is below a given thresholdrth withνTS−1ν < r2th. Only in this case, the system state vector ˆx can 32
be updated by means of∆xˆ= K·νusing the Kalman-gainK =Pˆ·HT·S, again depending on the 33
covariance matrixRof the measurements, while otherwise ˆxand ˆPare expanded by the new feature.
34
Particularly in artificial environments straight lines in a plane are frequently used as features, since
35
these are defined by just two parameters and can be clearly and uniquely determined. In contrast to
36
point features, lines in images are almost independent of illumination and perspective, and a number
37
x
ϕ
y
θ
id
r
i1
N
ρ
i. .
y
ix
id
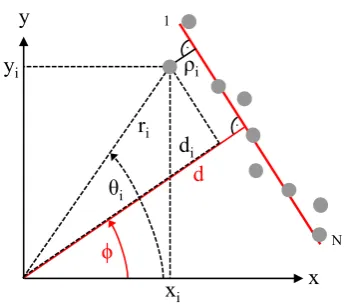
iFigure 1.Parameters of measured raw data and fitted straight line
of measurements can be taken along their length to localise them accurately and to distinguish them
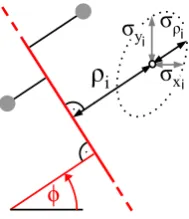
38
from artifacts [11]. Moreover, already a single line enables a robot to determine its orientation and
39
perpendicular distance, which clearly improves localization accuracy. Thus, many tracking systems
40
have been proposed based on line features, either using range-bearing scans [12][13] or applying visual
41
servoing, see [14][15], and also recently this approach has been successfully implemented [16][17][18].
42
However, due to missing knowledge of the covariance matrix, for data association often suboptimal
43
solutions like the Euclidian distance in Hough space [12] or other heuristics are used [19].
44
Obviously, fitting data to a straight line is a well-known technique, addressed in a large number
45
of papers [20][21][22] and textbooks [23][24][25]. In [26], a recent overview of algorithms in this field
46
is outlined. As shown in [27] and [28], if linear regression is applied to data with uncertainties in
x-47
and y-direction, always both coordinates must be considered as random variables. In [29], Arras and
48
Siegwart suggest an error model for range-bearing sensors including a covariance matrix, affected
49
exclusively by noise in radial direction. Pfister et al. introduce weights into the regression algorithm
50
in order to determine the planar displacement of a robot from range bearing scans [30]. In [31], a
51
maximum likelihood approach is used to formulate a general strategy for estimating the best fitted line
52
from a set of non-uniformly weighted range measurements. Also merging of lines and approximating
53
the covariance matrix from an iterative approach is considered. In [27] Krystek and Anton point out
54
that the weighting factors of the single measurements depend on the orientation of a line, which
55
therefore can only be determined numerically. This concept has been later extended to the general case
56
with covariances existing between the coordinates of each data point [32].
57
Since linear regression is sensitive with respect to outliers, split-and-merge algorithms must be
58
applied in advance, if a contour consists of several parts, see [33,34]. In cases of strong interference,
59
straight lines can still be identified by Hough-transformation, compare [35–37], or alternatively
60
RANSAC algorithms can be applied, see [38,39]. Although these algorithms work reliably, exact
61
determination of line parameters and estimating their uncertainties still requires linear regression [40].
62
In spite of a variety of contributions in this field, there is missing a straightforward but yet
63
accurate algorithm for determining the covariance matrix of lines reliably, fast and independently of
64
the a-priori mostly unknown measurement noise. In chapter4such a model in closed-form is proposed
65
depending on just a few clearly interpretable and easily obtainable parameters. Beforehand, in the next
66
two paragraphs existing methods for linear regression and calculation of the covariance matrix are
67
reviewed with certain extensions focussing on the usage of range-bearing sensors, which cause strong
68
covariances between x- and y-coordinates. Based on these theoretical foundations paragraph5exhibits
69
detailed simulation results in order to compare precision and robustness of the presented algorithms.
2. Determination of accurate line parameters
71
In 2d-space each straight line is uniquely described by its perpendicular distancedfrom origin
72
and by the angleφbetween positive x-axis and this normal line, see fig. 1. In order to determine 73
these two parameters, the mean squared error MSEconsidering the perpendicular distances of N
74
measurement points from the fitted line needs to be minimized. For this purpose, each perpendicular
75
distanceρiof pointiis calculated either from polar or withxi =ricosθiandyi =risinθialternatively
76
in cartesian coordinates as:
77
ρi=di−d=ricos(θi−φ)−d=xicosφ+yisinφ−d (1)
Then,MSEis defined as follows dependent onφandd: 78
MSE(φ,d) =
N
∑
i=1
(siρi)2 (2)
In (2) optional scaling valuessiare included in order to consider an individual reliability of each
79
measurement point. By calculating the derivatives of (2) with respect toφanddand setting both to 80
zero, the optimum values of these parameters can be analytically derived assuming allsito be constant,
81
i.e. independent ofφandd. The solution has been published elsewhere, compare [29], yielding forφ 82
andd:
83
φ= 1
2·atan2
−2σxy,σy2−σx2
(3)
d=x¯cosφ+y¯sinφ (4)
The function atan2() means the four quadrant arc tangent, which calculatesφalways in the 84
correct range. Ifdbecomes negative, its modulus must be taken and the correspondingφhas to be 85
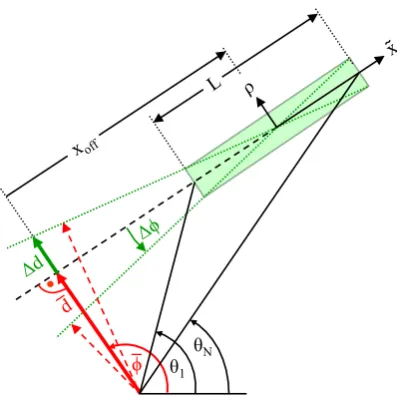
altered by plus or minusπ. In these equations, ¯xand ¯ydenote the mean values of allNmeasurements 86
xiandyi, whileσx2,σy2andσxydenote the variances and the covariance:
87
σx2= 1
N N
∑
i=1
wi(xi−x)¯ 2 (5)
σy2= 1
N N
∑
i=1
wi(yi−y)¯ 2 (6)
σxy= 1 N
N
∑
i=1
wi(xi−x) (y¯ i−y)¯ (7)
¯
x= 1 N
N
∑
i=1
wixi (8)
¯
y= 1 N
N
∑
i=1
wiyi (9)
In (5) - (9), normalized weighting factors wi are used with N1 ∑iN=1wi = 1 and 0 ≤ wi ≤ 1,
88
calculated dependent on the chosen scaling valuessi:
89
wi= s
2 i 1 N∑
N i=1s2i
(10)
For convenience, in the attachment a straightforward derivation ofdandφaccording to (3) and 90
(4) is sketched.
. .
ρ
iσ
ρσ
xσ
y.
ϕ
i i
i
Figure 2.Optimum setting of weighting parameter for each data point
As pointed out in [32], for accurate line matching the scaling valuessimust not be assumed to
92
be constant since in general they depend onφ. This can be understood from fig.2, which shows for 93
one measurement pointithe error ellipse spanned by the standard deviationsσx,iandσy,i, while the
94
rotation of the ellipse is caused by the covarianceσxy,i.
95
Apparently, as a measure of confidence only the deviationσρ,iperpendicular to the line is relevant,
96
while the variance of any data point in parallel to the fitted line does not influence its reliability. Thus,
97
the angleφgiven in (3) will only be exact, if the error ellipse equals a circle, which means that all 98
measurements exhibit the same standard deviations inx−as iny−direction and no covariance exist.
99
Generally, in order to determine optimum line parameters with arbitrary variances and covariance of
100
each measurementi, in equation (2) the inverse ofσρ,idependent onφhas to be used as scaling factor 101
si, yielding:
102
MSE(φ) =
N
∑
i=1
ρ2i(φ)
σρ2,i(φ) (11)
In this formula, which can only be solved numerically, the varianceσρ2,ineeds to be calculated 103
dependent on the covariance matrix of each measurement point i. In case of line fitting from
104
range-bearing scans, the covariance matrix Rrθ,i can be modeled as a diagonal matrix since both 105
parametersriandθiare measured independently and thus their covarianceσrθ,iequals zero: 106
Rrθ,i=
σr2,i 0
0 σθ2,i
!
(12)
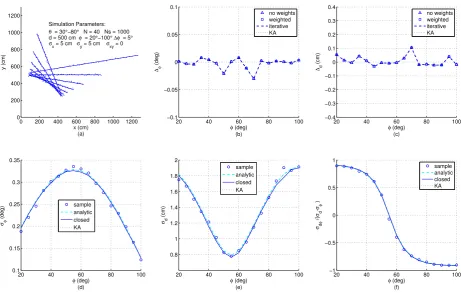
Typically, this matrix may also be considered as constant, thus independent of indexi, assuming
107
that all measured radii and angles are affected by the same noise, i.e.Rrθ,i ≈Rrθ. 108
With known variancesσr2,iandσθ2,iand for a certainφ, nowσρ2,iis determined by evaluating the 109
relation betweenρiand the distancesdiof each data point with 1≤i≤N. According to (1) and with
110
the distancedwritten as mean of alldiit follows:
111
ρi =di− 1 N
N
∑
j=1 dj=
N−
1
N
di− 1
N N
∑
j=1
(j6=i)
dj (13)
Since noise induced variations of all distancesdiare uncorrelated to each other, now the variance
112
σρ2,iis calculated by means of summing over all variancesσd2,i: 113
σρ2,i =
N−1
N
2
σd2,i+ 1
N2 N
∑
j=1
(j6=i)
In order to deriveσd2,i, changes ofdi with respect to small deviations of ri andθi from their
114
expected values ¯riand ¯θiare considered withdi=d¯i+∆di,ri =r¯i+∆riand withθi =θ¯i+∆θi:
115
∆di=∆dir+∆dθ
i (15)
The terms on the right side of (15) can be determined independently of each other, since∆riand
116
∆θiare assumed to be uncorrelated. Withdi=ri·cos(θi−φ)it follows 117
∆dir=∆ri·cos(θ¯i−φ) (16)
and
118
∆dθ i =r¯i
cos(θ¯i−φ+∆θi)−cos(θ¯i−φ)≈ −r¯i
"
∆θ2i
2 cos(θ¯i−φ) +∆θisin(θ¯i−φ) #
(17)
In the last line the addition theorem was applied for cos(θ¯i−φ+∆θi), and for small variations
119
the approximations cos(∆θi)≈1−∆θ
2
i
2 and sin(∆θi)≈∆θiare valid.
120
The random variables∆riand∆θi are assumed to be normally distributed with variancesσr2,i 121
andσθ2,i. Thus, the random variable∆θi2exhibits aχ2-distribution with variance 2(σθ2,i)2, see [41], and 122
the variance ofdiis calculated from (15), (16) and (17) as weighted sum with ¯riand ¯θiapproximately
123
replaced byriandθi, respectively:
124
σd2,i= σr2,i+
(σθ2,i)2
2 !
cos2(θi−φ) +σθ2,isin2(θi−φ) (18)
When applying this algorithm, a one-dimensional minimum search ofMSEaccording to (11)
125
needs to be executed, yielding the optimumφof the straight line. For this purpose,σρ2,iis inserted 126
from (14) considering (18), andρiis determined according to (1) by calculatingdfrom (4), (8), (9) and
127
(10) withsi =1/σρ,i.
128
Obviously, numerical line fitting can also be accomplished if measurements are available in
129
cartesian coordinatesxiandyi. In this case, the covariance matrixRxy,iof each measurement point
130
must be known, defined as:
131
Rxy,i=
σx2,i σxy,i
σxy,i σy2,i
!
(19)
Furthermore, the partial derivatives ofdi according to (1) with respect toxi andyi need to be
132
calculated:
133
Jd,i = ∂di ∂xi
∂di ∂yi
= cosφ sinφ
(20)
Then,σd2,ifollows dependent onRxy,iandJd,i: 134
σd2,i =Jd,i·Rxy,i·(Jd,i)T=σx2,icos2φ+σxy,isinφcosφ+σy2,isin2φ (21)
If raw data stems from a range-bearing scan,Rxy,ican be calculated fromRrθ,iby exploiting the
135
known dependencies between the polar- and cartesian plane. For this purpose the Jacobian matrix
136
Jxy,iis determined:
137
Jxy,i =
∂xi ∂ri
∂xi ∂θi
∂yi ∂ri
∂yi ∂θi
=
cosθi −risinθi
sinθi ricosθi
!
Then, the covariance matrixRxy,iwill depends onRrθ,i, if small deviations from the mean value 138
of the random variablesriandθiand a linear model are assumed:
139
Rxy,i= Jxy,i·Rrθ,i·(Jxy,i)
T (23)
According to (23) generally a strong covarianceσxy,iinRxy,imust be considered, if measurements
140
are taken by range-bearing sensors.
141
By means of applying (21) to (23) instead of (18) for searching the minimum ofMSEdependent on
142
φ, the second order effect regarding∆θi is neglected. This yields almost the same formula as given
143
in [32], though the derivation differs and in [32] additionally the variance ofdis ignored assuming
144
σρ2,i =σd2,i, which according to (14) is only asymptotically correct for largeN. 145
Finally, it should be noted that the numerical determination ofφaccording to (11) means clearly 146
more complexity compared to the straightforward solution according to equation (3). Later, in chapter
147
5it will be analyzed under which conditions this additional computational effort actually is required.
148
3. Analytic error models of straight lines
149
In literature several methods are described to estimate errors of φ and d and their mutual 150
dependency. Thus, the covariance matrixRdφmust be known, defined as: 151
Rdφ= σ 2 d σdφ σdφ σ
2
φ
!
(24)
For this purpose, a general method in nonlinear parameter estimation is the calculation of the
152
inverse Hessian matrix at the minimum ofMSE. Details can be found in [27] and [32], while in [42] it
153
is shown that this procedure may exhibit numerical instability. In section5, results using this method
154
are compared with other approaches.
155
Alternatively, in [29] and [43] an analytic error model is proposed based on fault analysis of the
156
line parameters. In this approach, the effect of variations of each single measurement point defined by
157
Rxy,iwith respect to the covariance matrix of the line parametersRdφis considered, based on (3) and 158
(4). Thereto, the Jacobian matrixJd
φ,iwith respect toxiandyiis determined, defined as:
159
Jd φ,i=
∂d ∂xi
∂d ∂yi ∂φ ∂xi
∂φ ∂yi
(25)
With this matrix the contribution of a single data pointito the covariance matrix betweendandφ 160
can be written as:
161
Rdφ,i =Jdφ,i·Rxy,i·J T
dφ,i (26)
For determining the partial derivatives ofdin (25), equation (4) is differentiated after expanding
162
it by (8) and (9), yielding:
163
∂d ∂xi =wi
cosφ
N + (y¯cosφ−x¯sinφ)
∂φ
∂xi (27)
∂d ∂yi =wi
sinφ
N + (y¯cosφ−x¯sinφ)
∂φ
∂yi (28)
Differentiatingφaccording to (3) with respect toxigives the following expression withu=−2σxy
164
andv=σy2−σx2: 165
∂φ
∂xi
= 1
2(u2+v2)
∂u ∂xi
v− ∂v
∂xi u
The partial derivation ofuin (29) is calculated after expanding it with (7) and (8) as:
166
∂u ∂xi
=−2
N·
∂
∂xi N
∑
i=1
wixiyi−y¯
N
∑
i=1 wixi
!
=−2wi
N (yi−y)¯ (30)
while partial derivation ofvwith (5), (6) and (8) yields:
167
∂v ∂xi =−
1
N·
∂
∂xi
N
∑
i=1 wix2i −
1
N N
∑
i=1 wixi
!2
=−
2wi
N (xi−x)¯ (31)
Finally, after substituting all terms withuandvin (29) it follows:
168
∂φ
∂xi =wi
σx2−σy2
(yi−y)¯ −2σxy(xi−x)¯ N
σx2−σy2
2
+4σxy2
(32)
Correspondingly, for the partial derivative ofφwith respect toyithe following result is obtained:
169
∂φ
∂yi =wi
σx2−σy2
(xi−x) +¯ 2σxy(yi−y)¯ N
σx2−σy2
2
+4σxy2
(33)
Now, after inserting (27), (28), (32) and (33) into (25) the covariance matrix ofdandφ(24) is 170
calculated by summing over allNdata points since the noise contributions of the single measurements
171
can be assumed to be stochastically independent of each other:
172
Rdφ= N
∑
i=1 Rdφ,i=
N
∑
i=1 Jd
φ,i·Rxy,i·J T
dφ,i (34)
Equation (34) enables an exact calculation of the variancesσd2,σφ2and of the covarianceσdφas 173
long as the deviations of the measurements stay within the range of a linear approach, and as long as
174
equations (3) and (4) are valid. In contrast to the method proposed in [32] no second derivatives and
175
no inversion of the Hessian matrix are needed and thus more stable results can be expected.
176
However, both algorithms need some computational effort especially for a large number of
177
measurement points. Moreover, they do not allow to understand the effect of changing parameters
178
onRdφ, and these models can only be applied, if for each data point the covariance matrixRxy,iis
179
available. Unfortunately, for lines extracted from images this information is unknown, and also in
180
case of using range-bearing sensors just a worst case estimate ofσris given in data sheet whileσθis 181
ignored.
182
4. Closed-form error model of a straight line
183
In this section a simplified error model in closed form is deduced, which enables a fast, clear and
184
yet for most applications sufficiently accurate calculation of the covariance matrix Rdφin any case
185
when line parametersdandφhave been determined from a number of discrete data points. 186
Thereto, first the expected values of the line parametersdandφ, denoted as ¯dand ¯φ, are assumed 187
to be known according to the methods proposed in section2with ¯d ≈ dand ¯φ ≈ φ. Besides, for 188
modeling the small deviation ofdandφ, the random variables∆dand∆φare introduced. Thus, with 189
d=d¯+∆dandφ=φ¯+∆φit follows for the variances and the covariance: 190
θ1
x
L
ϕ θN
Δd
d
xoff
Δϕ
ρ
∼
_ _
Figure 3.Dependency between∆d,∆φand geometric parameters
x L
i=−N
2 i=
N
2
Δx
Figure 4.Details of fig.3with the deviation of data points along the axis ˜x
Next,∆dand∆φshall be determined dependent on a random variation of any of theNmeasured 191
data points. For this purpose, fig.3is considered, which shows the expected line parameters and the
192
random variables∆dand∆φ. 193
In order to derive expressions for∆dand∆φdepending on the random variablesρi, fig.4shows
194
an enlargement of the rectangular box depicted in fig.3along the direction of the line ˜x.
195
First, the effect of variations of anyρion∆φis considered. Since∆φis very small, this angle may 196
be replaced by its tangent, which defines the slope∆mof the line with respect to the direction ˜x. Here,
197
onlyρiis considered as a random variable but not ˜xi. Thus, the standard formula for the slope of a
198
regression line can be applied, which will minimize the mean squared distance in the direction ofρ, if 199
all ˜xiare assumed to be exactly known:
200
∆φ≈tan(∆φ) =∆m= σρx˜ σx2˜
= ∑
i
ρi·xi˜ ∑
i
˜
x2 i
(36)
Now, in order to calculate the variance of∆φ, a linear relation between∆φand eachρiis required,
201
which is provided by the first derivation of (36) with respect toρi:
202
∂∆φ
∂ρi = xi˜
∑ i
˜
x2i (37)
Then, the variance of∆φdependent on the variance ofρican be specified. From (37) it follows:
σ∆2φ,i =σρ2,i·
∂∆φ
∂ρi
2
=σρ2,i· x˜
2 i
∑ i
˜
x2i
2 (38)
Ifσρ2,i is assumed to be approximately independent ofi, it may be replaced byσρ2and can be 204
estimated from (2) withρitaken from (1) and setting allsito 1/N:
205
σρ2,i≈σρ2= 1
N N
∑
i=1
ρi(φ,d)2 (39)
It should be noted, that for a bias-free estimation ofσρ2with (39), the exact line parametersφandd 206
must be used in (1), which obviously are not available. If instead estimated line parameters according
207
to chapter2are taken, e. g. by applying (3) and (4), calculated from the same data as used in (39),
208
an underestimation ofσρ2especially for small Ncan be expected, sinceφanddare determined by 209
minimizing the variance ofρof theseNdata points. This is referred to later. 210
Next, from (38) the variance of∆φresults as sum over allNdata points, since allρiare independent
211
of each other:
212
σ∆2φ=
∑
i
σ∆2φ,i≈σρ2· ∑
i
˜
xi2
∑ i
˜
x2i
2 =σ
2
ρ·
1
∑ i
˜
x2i (40)
Equation (40) with (35) and (39) enables an exact calculation ofσφ2dependent on theNdata points 213
of the line.
214
However, from (40) a straightforward expression can be derived, which is sufficiently accurate in
215
most cases and enables a clear understanding of the influencing parameters onσφ2, compare section5. 216
For this purpose, according to fig.3the lengthLof a line segment is determined from the perpendicular
217
distancedand from the anglesθ1andθNof the 1stand Nthdata point, respectively:
218
L=d· |tan(φ−θN)−tan(φ−θ1)| (41)
Furthermore, a constant spacing∆x˜between adjacent data points is assumed:
219
∆x˜≈ L
N−1. (42)
Applying this approximation, the sum over all squared ˜xican be rewritten, yielding for evenNas
220
depicted in fig.4:
221
∑
i
˜
x2i ≈2·
N/2
∑
i=1
∆
˜
x
2 (2i−1)
2
=∆x˜2·
N/2
∑
i=1
(2i−1)2
2 (43)
The last sum can be transformed into closed form as:
222
N/2
∑
i=1
(2i−1)2
2 =
N 2
4N22−1
6 =
N(N2−1)
12 (44)
WithNodd, the sum must be taken twice from 1 toN−21since in this case the central measurement
223
point has no effect onσ∆2φ,i, yielding: 224
∑
i
˜
x2i ≈2·
(N−1)
2
∑
i=1
[∆x˜·i]2=∆x˜2· (N−1)
2
∑
i=1
Again, the last sum can be written in closed form, which gives the same result as in (44):
225
(N−1) 2
∑
i=1
2·i2= N−1
2
N−
1
2 +1 2· N−1
2 +1
3 =
N(N2−1)
12 (46)
Finally, by substituting (43) with (44), or (45) with (46) into (40) and regarding (35) as well as (42),
226
a simple analytic formula for calculating the variance ofφis obtained, just depending onL,Nand the 227
variance ofρ: 228
σφ2≈σρ2· 12
L2·N· N−1
N+1
N1
≈ σρ2· 12
L2·N (47)
The last simplification in (47) overestimatesσφ2a little bit for smallN. Interestingly, this error 229
compensates quite well for a certain underestimation ofσρ2according to (39), assuming that the line 230
parametersφanddare determined from the same data asσρ2, see chapter5. 231
Next, in order to deduce the varianceσd2, again fig. 3is considered. Apparently, a first part of 232
the random variable∆dis strongly correlated to∆φsince any mismatch inφis transformed into a 233
deviation∆dby means of the geometric offsetxo f f with:
234
∆dφ=−x
o f f ·∆φ (48)
Actually, with a positive value forxo f f as depicted in fig.3the correlation between∆dand∆φ 235
becomes negative, since positive values of∆φcorrespond to negative values of∆d. According to fig.3, 236
xo f f is determined fromφanddas well as fromθ1andθN:
237
xo f f = d
2·[tan(φ−θN) +tan(φ−θ1)] (49)
Alternatively,xo f f can be taken as mean value from allNdata points of the line segment:
238
xo f f = d N ·
N
∑
i=1
tan(φ−θi) (50)
Nevertheless, it should be noted that∆dis not completely correlated with∆φ, since also in the 239
casexo f f =0 the error∆dwill not be zero.
240
Indeed, as a second effect each singleρihas a direct linear impact on the variable∆d. For this purpose,
241
in fig.4the random variable∆dρis depicted, which describes a parallel shift of the regression line due 242
to variation inρi, calculated as mean value over allρi:
243
∆dρ= 1
N·
∑
i ρi (51)Combining both effects, variations indcan be described as the sum of two uncorrelated terms,
244
∆dφand∆dρ: 245
∆d=∆dφ+∆dρ=−xo f f ·∆φ+ 1
N ·
∑
i ρi (52)This missing correlation between∆φand the sum over allρiis also intuitively accessible: If the
246
latter takes a positive number it will not be possible to deduce the sign or the modulus of∆φ. From 247
(52) and withE(∆dφ·∆dρ) =0,E(∆dφ) =0 andE(∆dρ) =0 the varianceσ2
dcan be calculated as
248
σd2=E([∆d]2) =E([∆dφ]2) +E([∆dρ]2) =x2o f f ·E([∆φ]2) + 1
N2·E
"
∑
i
ρi
#2
0 200 400 600 800 1000 1200 0
200 400 600 800 1000 1200
Simulation Parameters:
d = 500 cm φ = 20°−100° ∆φ = 5°
θ = 30°−80° N = 40 Ns = 1000
σ
x = 5 cm σy = 5 cm σxy = 0
x (cm) (a)
y (cm)
20 40 60 80 100
−0.1 −0.05 0 0.05 0.1
φ (deg) (b)
∆φ
(deg)
no weights weighted iterative KA
20 40 60 80 100
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4
φ (deg) (c)
∆d
(cm)
no weights weighted iterative KA
20 40 60 80 100
0.1 0.15 0.2 0.25 0.3 0.35
φ (deg) (d)
σφ
(deg)
sample analytic closed KA
20 40 60 80 100
0.8 1 1.2 1.4 1.6 1.8 2
φ (deg) (e)
σd
(cm)
sample analytic closed KA
20 40 60 80 100
−1 −0.5 0 0.5 1
φ (deg) (f)
σd
φ
/(
σd ⋅σφ
)
sample analytic closed KA
Figure 5.Simulation Results for equidistant measurement points superimposing normal distributed
and uncorrelated noise inx- andy-direction
≈x2o f f ·σφ2+ 1
N·σ 2
ρ (54)
In the last step from (53) to (54) again the independence of the single measurements from each
249
other is used, thus the variance of the sum of theNdata points approximatesN-times the varianceσρ2. 250
Finally, the covariance betweenφanddneeds to be determined. Based on the definition it follows 251
withσdφ=σ∆d∆φ 252
σdφ=E(∆d·∆φ) =E(∆dφ·∆φ) +E(∆dρ·∆φ) =−xo f f ·E([∆φ]2) =−xo f f·σφ2 (55)
By means of (47), (54) and (55), now the complete error model in closed form is known, represented
253
by the covariance matrixRdφgiven as:
254
Rdφ≈σρ2·
12·x2
o f f L2·N +N1
−12·xo f f L2·N
−12·xo f f
L2·N L122·N
(56)
Applying this error model is easy since no knowledge of the variances and covariance for each
255
single measurement is needed, which in practice is difficult to acquire. Instead, just the numberNof
256
preferably equally spaced points used for line fitting, the lengthLof the line segment, its offsetxo f f
257
and the varianceσρ2according to (41), (49) and (39) must be inserted. 258
5. Simulation results
259
The scope of this section is to compare the presented algorithms for linear regression and
260
error modeling based on statistical evaluation of the results. Segmentation of raw data is not
261
considered; if necessary this must be performed beforehand by means of well-known methods
like Hough-Transformation or RANSAC, compare section1. Thus, for studying the performance
263
reliably and repeatably, a large number of computer simulations was performed, applying a systematic
264
variation of parameters within a wide range, which would not be feasible if real measurement are
265
used.
266
For this purpose, straight lines with a certain perpendicular distancedfrom origin and within
267
a varying range of normal anglesφhave been specified. Each of these lines is numerical described 268
by a number ofNpoints either given in cartesian (xi,yi) or in polar (riθi) coordinates. In order to
269
simulate the outcome of a real range-bearing sensor as close as possible, the angular coordinate was
270
varied betweenθ1andθN. To each measurement a certain amount of normally distributed noise with
271
σx,σyandσxyor alternatively withσrandσθwas added. Further, for eachφa number ofNs=1000 272
sets of samples was generated, in order to allow statistical evaluation of the results. A first simulation
273
was performed withN = 40 equally spaced points affected each by uncorrelated noise inx−and
274
y−direction with standard deviationsσx=σy=5cm. This is a typical situation when a line is calculated
275
from binary pixels, and in subfigure (a) of fig. 5a bundle of the simulated line segments is shown.
276
The deviations∆φand∆dtaken as mean value over all Ns samples of the estimatedφandd from 277
their true values, respectively, are depicted in subfigures (b) and (c) comparing four algorithms as
278
presented in section2: The triangles mark the outcome of equations (3) and (4) with all weights set to
279
one, whereas the squares are calculated according to the same analytic formulas but using individual
280
weighting factors applying (10) withsi = 1/σρ,i. The perpendicular deviationsσρ,iare determined
281
according to (14) and (21) withφ taken from (3) without weights. Obviously, in this example all 282
triangles coincide with the squares since each measurementiis affected by the same noise and thus
283
for anyφall weighting factors are always identical. The dashed lines in (b) and (c) show the results 284
when applying the iterative method according to (11) with the minimum ofMSEfound numerically.
285
For this purpose,σρ2,iis inserted from (14) considering (21),ρiis taken from (1) anddis calculated from
286
(4), (8), (9) and (10) withsi =1/σρ,i. The dotted lines (KA) depict the deviations ofdandφobtained 287
according to Krystek and Anton in [32]. Both numerical algorithm yield the same results, which is
288
not surprising, since the variancesσρ2,iused as weighting factors are all identical. Further, here the 289
analytical algorithms provide exactly the same performance as the numerical ones, since forσx=σy
290
the weighting factors show no dependency onφand for that case the analytical formulas are optimal. 291
The lower subfigures depict the parameters of the covariance matrixRdφ again as a function 292
ofφcomparing different methods. Here, the circles represent numerical results obtained from the 293
definitions of variance and covariance by summing over allNspasses with 1≤k≤Ns, yieldingdkand
294
φk, respectively:
295
σd2= 1
Ns Ns
∑
k=1
(dk−d)2 (57)
σφ2= 1
Ns Ns
∑
k=1
(φk−φ)2 (58)
σdφ= 1
Ns Ns
∑
k=1
(dk−d) (φk−φ) (59)
Since these numerical results serve just as reference for judging the accuracy of the error models,
296
in the formulas above the true values fordandφhave been used. The required line parametersdk 297
andφkin (57) - (59) can be estimated with any of the described four methods, since minor differences 298
indkandφk have almost no effect on the resulting variances and the covariance. The dashed lines
299
in subfigures (d) - (f) show the results of the analytic error model as described in section3, and
300
the dotted lines represent the outcomes of the algorithm from Krystek and Anton [32], while the
301
continuous line corresponds to the model in closed-form according to (56) in section4withLand
302
xo f f taken from (41) and (49), respectively. Interestingly, although the theoretical derivations differ
2 4 6 8 10 12 14 16 18 20 0
5 10 15 20 25 30
Number N of measurement points
σ ρ 2 (cm 2 )
with exact line parameters with estimated line parameters estimated with correction
Figure 6.Variance ofρdependent on the numberNof measured data points, using the same simulation
parameters as indicated in figure5(a)
substantially, the results match very well, which especially proves the correctness of the simplified
304
model in closed-form. Since this model explicitly considers the effect of the line lengthLand of the
305
geometric offsetxo f f, the behavior of the curves can be clearly understood: The minimum ofLwill
306
occur ifφequals the mean value ofθminandθmax, i.e. atφ=55◦, and exactly at this angle the maximum 307
standard deviationσφoccurs. Further, sinceLlinearly depends onφ, a quadratic dependence ofσφ 308
onφaccording to (47) can be observed. With respect to fig.5(e) the minimum ofσdalso appears at
309
φ=55◦corresponding toxo f f =0. At this angle according to (54) the standard deviation ofdis given 310
asσd≈σρ/
√
N=5/√40=0.79, while the covarianceσρdcalculated according to (55) and with it the 311
correlation coefficient shown in fig.5(f) vanishes.
312
When comparing the results, one should be aware that in the simulations of the analytic error
313
models the exact variancesσx2i,σy2i andσxyi are used, thus in practice achievable accuracies will be
314
worse. On the other hand, when applying the new error model in closed-form, the varianceσρ2is 315
calculated as mean value of allρ2i from the actual set ofNdata points according to (39) and hence is 316
always available.
317
Nevertheless, if in this equation the estimated line parametersφand d are used, which are 318
calculated e. g. according to (3) and (4) using the same measurements as in (39), no unbiasedσρ2can 319
be expected. This is reasoned from the fact that for each set ofNdata points, the mean quadratic
320
distance over allρ2i is minimized in order to estimateφandd. Thus, the numeric value ofσρ2will 321
always be smaller than its correct value calculated with the exact line parameters. This effect can be
322
clearly observed from fig.6, which shows for the same simulation parameters as depicted in fig.5(a)
323
the dependency ofσρ2on the number of points on the lineN, averaged overNssets of samples: Only 324
in case of using the exact line parameters in (39), which obviously are only available in a simulation,
325
actually the correctσρ2 =25cm2is obtained as shown by the triangles. If however at each runσρ2is 326
calculated with the estimatedφanddas indicated by the squares, a clear deviation especially at lowN 327
occurs. Only asymptotically for largeNwhenφconverges to its exact value the correctσρ2is reached. 328
Fortunately, this error can be compensated quite well by means of multiplyingσρ2with a correction 329
factorc= NN−+11as shown by the dashed line in fig.6. Due to the strongly non-linear relation betweenφ 330
and anyρi, this correction works much better than simply exchanging in (39) the divisorNbyN−1
331
0 200 400 600 800 1000 1200 0
200 400 600 800 1000 1200
Simulation Parameters:
d = 500 cm φ = 20°−100° ∆φ = 5°
θ = 30°−80° N = 40 Ns = 1000
σ
r = 5 cm σθ = 0.1° σrθ = 0
x (cm) (a)
y (cm)
20 40 60 80 100
−0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03
φ (deg) (b)
∆φ
(deg)
no weights weighted iterative KA
20 40 60 80 100
−0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25
φ (deg) (c)
∆d
(cm)
no weights weighted iterative KA
20 40 60 80 100
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
φ (deg) (d)
σφ
(deg)
sample analytic closed KA
20 40 60 80 100
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
φ (deg) (e)
σd
(cm)
sample analytic closed KA
20 40 60 80 100
−1 −0.5 0 0.5 1
φ (deg) (f)
σd
φ
/(
σd ⋅σφ
)
sample analytic closed KA
Figure 7.Results from simulated range-bearing scans superimposing low noise inr- andθ-direction
(47), the closed-form of the covariance matrixRdφaccording to (56) yields almost unbiased results also 333
for smallNifσρ2is calculated according to (39) with estimated line parametersφandd. Although not 334
shown here, the proposed bias compensation works well for a large range of measurement parameters.
335
For a reliable determination ofσρ2fromNdata points of a line segment,Nshould be at least in the 336
order of 10.
337
Figure7shows the results when simulating a range-bearing scan with a constant angular offset
338
∆θ = (θmax−θmin)/(N−1) between adjacent measurements. Each measurement is distorted by
339
adding normally distributed noise with standard deviationsσr=5cmandσθ =0.1◦. This is a more 340
challenging situation, since now the measurements are not equispaced, each data point exhibits
341
individual variancesσx,i,σy,idependent onφ, and moreover a covarianceσxy,iexists. As can be seen,
342
the errors of the estimatedφand das depicted in subfigure (b) and (c) exhibit the same order of 343
magnitude as before, yet, both analytic results differ slightly from each other and are less accurate
344
compared to the numerical solutions. Both numerical methods yield quasi identical results, since for
345
the chosen small noise amplitudes the differences between both algorithms have no impact on the
346
resulting accuracy.
347
Regarding the error models, subfigures (d) to (f) reveal, that in spite of unequal distances between
348
the measurement points and varyingσρ,ithe results of the closed-form model match well with the
349
analytic and numeric results. Onlyσdshows a certain deviation at steep and flat lines withφbelow 30◦ 350
or above 80◦. This is related to errors inxo f f, since in this range ofφthe points on the lines measured 351
with constant∆θhave clearly varying distances and thus (49) yields just an approximation of the 352
effective offset of the straight line.
353
The next figure8shows the results with the models applied to short lines measured in the angular
354
range of 30◦≤θ≤40◦withN=20, while all other parameters are identical to those depicted in fig. 355
7(a). As can be seen from subfigures (b) and (c), now the analytical algorithms based on (3) and (4)
356
are no longer adequate since these, independent of applying weights or not, yield much higher errors
0 200 400 600 800 1000 1200 0 200 400 600 800 1000 1200 Simulation Parameters:
d = 500 cm φ = 20°−100° ∆φ = 5°
θ = 30°−40° N = 20 Ns = 1000
σ
r = 5 cm σθ = 0.1° σrθ = 0
x (cm) (a)
y (cm)
20 40 60 80 100
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4
φ (deg) (b) ∆φ (deg) no weights weighted iterative KA
20 40 60 80 100
−1 −0.5 0 0.5 1 1.5 2 2.5
φ (deg) (c) ∆d (cm) no weights weighted iterative KA
20 40 60 80 100
0 0.5 1 1.5 2 2.5
φ (deg) (d) σφ (deg) sample analytic closed KA
20 40 60 80 100
1 2 3 4 5 6 7 8 9
φ (deg) (e) σd (cm) sample analytic closed KA
20 40 60 80 100
−1 −0.5 0 0.5 1
φ (deg) (f) σd φ /( σd ⋅σφ ) sample analytic closed KA
Figure 8.Results from simulated range-bearing scans of short lines superimposing low noise inr- and
θ-direction
0 200 400 600 800 1000 1200 0 200 400 600 800 1000 1200 Simulation Parameters:
d = 500 cm φ = 20°−100° ∆φ = 5°
θ = 30°−80° N = 20 Ns = 1000
σ
r = 0 cm σθ = 2° σrθ = 0
x (cm) (a)
y (cm)
20 40 60 80 100
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4
φ (deg) (b) ∆φ (deg) no weights weighted iterative KA
20 40 60 80 100
−2 −1.5 −1 −0.5 0 0.5
φ (deg) (c) ∆d (cm) no weights weighted iterative KA
20 40 60 80 100
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
φ (deg) (d) σφ (deg) sample analytic closed KA
20 40 60 80 100
0 2 4 6 8 10 12
φ (deg) (e) σd (cm) sample analytic closed KA
20 40 60 80 100
−1 −0.5 0 0.5 1
φ (deg) (f) σd φ /( σd ⋅σφ ) sample analytic closed KA
0 200 400 600 800 1000 1200 0
200 400 600 800 1000 1200
Simulation Parameters:
d = 500 cm φ = 20°−100° ∆φ = 5°
θ = 30°−80° N = 10 Ns = 1000
σ
r = 5 cm σθ = 0.1° σrθ = 0
x (cm) (a)
y (cm)
20 40 60 80 100
−0.03 −0.02 −0.01 0 0.01 0.02 0.03 0.04
φ (deg) (b)
∆φ
(deg)
no weights weighted iterative KA
20 40 60 80 100
−0.15 −0.1 −0.05 0 0.05 0.1 0.15 0.2 0.25
φ (deg) (c)
∆d
(cm)
no weights weighted iterative KA
20 40 60 80 100
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
φ (deg) (d)
σφ
(deg)
sample analytic closed KA
20 40 60 80 100
1 1.5 2 2.5 3 3.5 4
φ (deg) (e)
σd
(cm)
sample analytic closed KA
20 40 60 80 100
−1 −0.5 0 0.5 1
φ (deg) (f)
σd
φ
/(
σd ⋅σφ
)
sample analytic closed KA
Figure 10. Results from simulated range-bearing scans with a low number of data points and only
approximately known noise level of the sensor
than the numerical approaches. All error models however provide still accurate results. Actually, the
358
closed-form model even yields better accuracy than before, since the distances of the data points on
359
the line between adjacent measurement and alsoσρ,iare more uniform compared to the simulations
360
with long lines.
361
In order to check the limits of the models, figure9depicts the results when applying large
362
angular noise withσθ=2◦. In this extreme case also the numerical algorithms show systematic errors 363
dependent onφsince the noise ofρican no longer be assumed to be normally distributed. However,
364
according to subfigures (b) and (c) the iterative method as presented in section2shows clear benefits
365
in comparison to the KA-algorithm proposed in [32], caused by the more accurate modeling ofσρi.
366
With respect to the outcome of the noise models in subfigures (d) to (f), now only the analytic
367
algorithm as presented in paragraph3still yields reliable results, while the KA-method based on
368
matrix inversion reveals numerical instability. Due to the clear uneven distribution of measurements
369
along the line also the simplified error model in this case shows clear deviations, although at least the
370
order of magnitude is yet correct.
371
Finally, figure10shows typical results, if the sensor noise is not exactly known. In this example,
372
the radial standard deviation was assumed to be 10 cm whereas the exact value, applied when
373
generating the measurements, was only 5 cm. The simulation parameters correspond to those in figure
374
7, only the number of data points has been reduced toN=10. According to subfigures (b) and (c), now
375
for calculatingφanddthe numerical methods yield no benefit over the analytical formulas with or 376
without weights. Due to the only approximately known variance, the analytic error model as well
377
as the KA-method in (d) to (f) reveal clear deviations from the reference results. Only the model in
378
closed-form is still accurate, since it does not require any a-priori information regarding sensor noise.
379
In addition, these results prove the bias-free estimation ofσρ2with (39) also ifNis low as depicted in 380
figure6.
6. Conclusion
382
In this study the performance of linear regression is evaluated, assuming both coordinates as
383
random variables. It is shown, that especially with range-bearing sensors, frequently used in mobile
384
robotics, a distinct covariance of the noise in x- and y-direction at each measurement point exists. In
385
this case, analytical formulas assuming identical and uncorrelated noise, will only provide accurate
386
line parametersφanddif the detected line segments are sufficiently long and the noise level stays 387
below a certain limit. If this prerequisites are not fulfilled and if the sensor noise is known, numerical
388
algorithms should be applied, which consider the reliability of each measurement point as a function
389
ofφ. At this, the performance of prior art can be improved by means of modeling the independence of 390
the single data points exactly and by paying attention also to 2nd order effects of the angular noise.
391
The main focus of this paper is on the derivation of the covariance matrixRdφof straight lines. 392
This information has crucial impact on the performance of SLAM with line features, since for both, data
393
association and sensor fusing,Rdφmust be estimated precisely. For this purpose, first analytical error 394
models are reviewed, which however need exact knowledge of the measurement noise, although in
395
many applications this is not available. In addition, these approaches require high computational effort
396
and do not allow to comprehend the effect of measurement parameters on the resulting accuracy of an
397
estimated straight line. Thus, a new error model in closed form is proposed, just depending on two
398
geometric parameters as well as on the number of points of a line segment. Besides, a single variance
399
must be known, which is determined easily and reliably from the same measurements as used for line
400
fitting. By means of this model the covariance matrix can be estimated fast and exactly. Moreover,
401
it allows to adapt measurement conditions in order to achieve maximum accuracy of detected line
402
features.
403
Appendix. Analytic derivation of straight line parameters with errors in both coordinates
404
For the derivation of the perpendicular distanced, the partial derivative of equation (2) with
405
respect todis taken and set to zero, which directly gives equation (4) using (8), (9) and (10). In order
406
to calculateφ, first the partial derivation of (2) with respect toφmust be calculated and set to zero, 407
yielding:
408
1
N N
∑
i=1 si
h
xiyi
cos2φ−sin2φ
+y2i−x2isinφ cosφ
i
+ 1 N
N
∑
i=1
sid(xisinφ−yicosφ) =0 (A1)
Now, the distancedcan be replaced by (4), and after inserting the definitions of ¯x, ¯y,σ2x,σy2and 409
σxyaccording to (5) - (9) considering (10) it follows from (A1) after reordering:
410
σxy
cos2φ−sin2φ
+sinφcosφ
σy2−σx2
=0 (A2)
Applying the theorem ofPythagorasand the addition theorems of angles, the terms with sine and
411
cosine can be rewritten:
412
cos2φ−sin2φ=2 cos2φ−1=cos 2φ (A3)
sinφcosφ= 1
2sin 2φ (A4)
Inserting these formulas into (A2), finally yields forφ: 413
φ= 1
2arctan
−2σxy
σy2−σx2
!
(A5) calculates φalways in the range−π/4 < φ < π/4, although according to fig. 1this is 414
only correct ifσy2>σx2, while in the caseσy2<σ2xan angleπ/2 must be added toφ. Thus, as general 415
solution (3) should be taken also avoiding a special consideration ifσy2equalsσ2x. 416
References
417
1. Everett, H.R.Sensors for Mobile Robots; Number ISBN 978-1568810485, A. K. Peters, 1995. 418
2. Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Analysis and Machine
419
Intelligence1986,8, 679–698. 420
3. Guse, W.; Sommer, V. A New Method for Edge Oriented Image Segmentation.Picture Coding Symposium,
421
Tokio1991. 422
4. Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR Integrated Navigation System for Urban and 423
Indoor Environments Using Hybrid Scan Matching Algorithm. Sensors2015,15, 23286–23302. 424
5. Lu, F.; Milios, E. Robot pose estimation in unknown environments by matching 2D range scans. Journal of
425
Intelligent and Robotic Systems1997,18, 249–275. 426
6. Arras, K.O.; Castellanos, J.A.; Schilt, M.; Siegwart, R. Feature-based multi-hypothesis localization and 427
tracking using geometric constraints. Robotics and Autonomous Systems2003,44, 41–53. 428
7. Borenstein, J.; Everett, H.R.; Feng, L. Navigating Mobile Robots, Systems and Techniques; Number ISBN 429
978-1568810669, A. K. Peters, 1996. 430
8. Neira, J.; Tardos, J.D. Data association in stochastic mapping using the joint compatibility test. IEEE
431
Transactions on Robotics and Automation2001,17, 890–897. 432
9. Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: part I.IEEE Robotics & Automation
433
Magazine2006,13, 99–110. 434
10. Blanco, J.L.; Gonzalez-Jimenez, J.; Fernandez-Madrigal, J.A. An Alternative to the Mahalanobis Distance 435
for Determining Optimal Correspondences in Data Association. Transactions on Robotics2012,28, 980–986. 436
11. Wang, H.; Liu, Y.H.; Zhou, D. Adaptive Visual Servoing Using Point and Line Features With an 437
Uncalibrated Eye-in-Hand Camera. IEEE Transactions on Robotics2008,24, 843–857. 438
12. Choi, Y.H.; Lee, T.K.; Oh, S.Y. A line feature based SLAM with low grade range sensors using geometric 439
constraints and active exploration for mobile robot. Autonomous Robots2008,24, 13–27. 440
13. Yin, J.; Carlone, L.; Rosa, S.; Anjum, M.L.; Bona, B. Scan Matching for Graph SLAM in Indoor Dynamic 441
Scenarios. Proceedings of the Twenty-Seventh International Florida Artificial Intelligence Research Society
442
Conference2014, pp. 418–423. 443
14. Pasteau, F.; Narayanan, V.K.; Babel, M.; Chaumette, F. A visual servoing approach for autonomous corridor 444
following and doorway passing in a wheelchair. Robotics and Autonomous Systems2016,75, 28–40. 445
15. David, P.; DeMenthon, D.; Duraiswami, R.; Samet, H. Simultaneous pose and correspondence 446
determination using line features.Proc. of Computer Vision and Pattern Recognition2003,2, 424–431. 447
16. Marchand, É.; Fasquelle, B. Visual Servoing from lines using a planar catadioptric system. Conf. on
448
Intelligent Robots and Systems (IROS)2017, pp. 2935–2940. 449
17. Bista, S.R.; Giordano, P.R.; Chaumette, F. Combining Line Segments and Points for Appearance- based 450
Indoor Navigation by Image Based Visual Servoing. IEEE/RSJ International Conference on Intelligent Robots
451
and Systems (IROS)2017, pp. 2960–2967. 452
18. Xu, D.; Lu, J.; Wang, P.; Zhang, Z.; Liang, Z. Partially Decoupled Image-Based Visual Servoing Using 453
Different Sensitive Features.IEEE Transactions on Systems, Man, and Cybernetics: Systems2017,47, 2233–2243. 454
19. Jeong, W.Y.; Lee, K.M. Visual SLAM with Line and Corner Features. Conference on Intelligent Robots and 455
System, IROS. IEEE, 2006. 456
20. York, D. Least-squares fitting og a straight line. Can. J. Phys.1966,44, 1079–1086. 457
21. Krane, K.S.; Schecter, L. Regression line analysis.Am. J. Phys.1982,50. 458
22. Golub, G.; van Loan, C. Ana analysis of the total least squares problem. SIAM J. Num. Anal. 1980, 459
17, 883–893. 460
23. Weisberg, S.Applied linear regression, 3rd edition ed.; Number ISBN 0-471-66379-4, John Wiley & Sons, 2005. 461
24. Draper, N.R.; Smith, H.Applied Regression Analysis, 3rd edition ed.; John Wiley & Sons, 1988. 462
25. Seber, G.A.F.; Lee, A.J.Linear Regression Analysis, 2nd edition ed.; Number ISBN 0 471 41540 5, John Wiley 463
26. Amiri-Simkooeiab, A.R.; Zangeneh-Nejadac, F.; Asgaria, J.; Jazaeri, S. Estimation of straight line parameters 465
with fully correlated coordinates. Journal of the International Measurement Confederation2014,48, 378–386. 466
27. Krystek, M.; Anton, M. A weighted total least-squares algorithm for fitting a straight line.Measurement
467
Science and Technology2007,18, 3438–3442. 468
28. Cecchi, G.C. Error analysis of the parameters of a least-squares determined curve when both variables 469
have uncertainties. Measurement Science and Technology1991,2, 1127–1129. 470
29. Arras, K.O.; Siegwart, R.Y. Feature Extraction and Scene Interpretation for Map-Based Navigation and 471
Map Building. Proc. of SPIE, Mobile Robotics XII, 1997, pp. 42–53. 472
30. Pfister, S.T.; Kriechbaum, K.L.; S. I. Roumeliotis, J.W.B. A Weighted range sensor matching algorithms for 473
mobile robot displacement estimation. Proceedings IEEE International Conference on Robotics and Automation
474
2002,4.
475
31. Pfister, A.T.; Roumeliotis, S.I.; Burdick, W. Weighted line fitting algorithms for mobile robot map building 476
and efficient data representation. Proc. of the 2003 IEEE int. Conf. on Robotics and Automation2003, pp. 477
1304–1311. 478
32. Krystek, M.; Anton, M. A least-squares algorithm for fitting data points with mutually correlated 479
coordinates to a straight line. Measurement Science and Technology2011,22, 1–9. 480
33. Borges, G.A.; Aldon, M.J. A Split-and-Merge Segmentation Algorithm for Line Extraction in 2-D Range 481
Images. Proceedings. 15th International Conference on Pattern Recognition2000,4. 482
34. Jian, M.; Zhang, C.F.; Yan, F.; Tang, M.Z. A global line extraction algorithm for indoor robot mapping based 483
on noise eliminating via similar triangles rule. 35th Chinese Control Conference (CCC)2016, pp. 6133–6138. 484
35. J.Illingworth.; J.Kittler. A survey of the hough transform.Computer Vision, Graphics, and Image Processing
485
1988,44, 87–116. 486
36. Kim, J.; Krishnapuram, R. A Robust Hough Transform Based on Validity. Internat. Conf. on Computational 487
Intelligence. IEEE, 1998, Vol. 2, pp. 1530–1535. 488
37. Banjanovic-Mehmedovic, L.; Petrovic, I.; Ivanjko, E. Hough Transform based Correction of Mobile Robot 489
Orientation. Internat. Conf. on Industrial Technology2004,3, 1573–1578. 490
38. Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications 491
to Image Analysis and Automated Cartography. Communications of the ACM1981,25, 381–395. 492
39. Liu, Y.; Gu, Y.; Li, J.; Zhang, X. Robust Stereo Visual Odometry Using Improved RANSAC-Based Methods 493
for Mobile Robot Localization. Sensors2017,17, 2339–2357. 494
40. Nguyen, V.; Martinelli, A.; Tomatis, N.; Siegwart, R. A Comparison of Line Extraction Algorithms using 495
2D Laser Rangefinder for Indoor Mobile Robotics. Conference on Intelligent Robots and System, IROS. 496
IEEE, 2005. 497
41. Westfall, P.H.Understanding Advanced Statistical Methods, chapter 16; CRC Press, 2013. 498
42. Dovì, V.G.; Paladino, O.; Reverberi, A.P. Some remarks on the use of the inverse hessian matrix of the 499
likelihood function in the estimation of statistical properties of parameters. Applied Mathematics Letters
500
1991,4, 87–90. 501
43. Garulli, A.; Giannitrapani, A.; Rossi, A.; Vicino, A. Mobile robot SLAM for line-based environment 502