R E S E A R C H
Open Access
An observer-based vaccination control law
for an SEIR epidemic model based on
feedback linearization techniques for
nonlinear systems
S Alonso-Quesada
1*, M De la Sen
1, RP Agarwal
2and A Ibeas
3*Correspondence:
1Department of Electricity and
Electronics, Faculty of Science and Technology, University of the Basque Country, UPV/EHU, Campus de Leioa, Leioa, Bizkaia 48940, Spain Full list of author information is available at the end of the article
Abstract
This paper presents a vaccination strategy for fighting against the propagation of epidemic diseases. The disease propagation is described by an SEIR (susceptible plus infected plus infectious plus removed populations) epidemic model. The model takes into account the total population amounts as a refrain for the illness transmission since its increase makes the contacts among susceptible and infected more difficult. The vaccination strategy is based on a continuous-time nonlinear control law synthesisedviaan exact feedback input-output linearization approach. An observer is incorporated into the control scheme to provide online estimates for the susceptible and infected populations in the case when their values are not available from online measurement but they are necessary to implement the control law. The vaccination control is generated based on the information provided by the observer. The control objective is to asymptotically eradicate the infection from the population so that the removed-by-immunity population asymptotically tracks the whole one without precise knowledge of the partial populations. The model positivity, the eradication of the infection under feedback vaccination laws and the stability properties as well as the asymptotic convergence of the estimation errors to zero as time tends to infinity are investigated.
Keywords: SEIR epidemic models; vaccination; nonlinear control; stability; positivity; nonlinear observers design
1 Introduction
A relevant area in the mathematical theory of epidemiology is the development of mod-els for studying the propagation of epidemic diseases in a host population [–]. The epidemic mathematical models analysed in such an exhaustive list of books and papers include the most basic ones [–], namely (i) SI models where only susceptible and in-fected populations are assumed to be present in the model, (ii) SIR models which include susceptible plus infected plus removed-by-immunity populations and (iii) SEIR models where the infected population is split into two ones, namely the ‘infected’ (or ‘exposed’) which incubate the disease but do not still have any disease symptoms and the ‘infectious’ (or ‘infective’) which do have the external disease symptoms. Those models can be di-vided into two main classes, namely the so-called ‘pseudo-mass action models’, where the total population is not taken into account as a relevant disease contagious factor and the
so-called ‘true-mass action models’, where the total population is more realistically con-sidered as an inverse factor of the disease transmission rates. There are many variants of the above models as, for instance, the SVEIR epidemic models which incorporate the dynamics of a vaccinated population in comparison with the SEIR models [–] and the SEIQR-SIS model which adds a quarantine population []. Other variant consists of the generalisation of such models by incorporating point and/or distributed delays [, –, ]. All of the aforementioned models are so-called compartmental models since host individuals are classified depending on their status in relation to the infectious dis-ease. However, there are diseases where some factors such as the disease transmission, the mortality rate and so on are the functions of age. Then such diseases are described more precisely by means of the so-called compartmental models with age structure []. More-over, although the dynamics of infectious diseases transmission through a host popula-tion is continuous-time, some researchers have proposed models composed of difference equations to describe the dynamics of epidemics and develop treatments to minimise its effects within the population []. On the one hand, a key point in such research works is the choice of an optimal-time step in order to obtain an acceptable discrete-time model from the discretisation of the continuous-time ones. On the other hand, an advantage is that discrete-time models are easier to analyse than continuous-time ones, and then the effectiveness of a potential treatment to eradicate the disease from the host population can be easier to derive.
The analysis of the existence of equilibrium points, relative to either the persistence (en-demic equilibrium point) or extinction (disease-free equilibrium point) of the epi(en-demics in the host population [, , –], the constraints for guaranteeing the positivity and the boundedness of the solutions of such models [, , ] and the conditions that generate an oscillatory behaviour in such solutions [, ] have been some of the main objectives in the literature about epidemic mathematical models. Other important aim is that rela-tive to the design of control strategies in order to eradicate the persistence of the infection in the host population [, , , , ]. In this context, an explicit vaccination function of many different kinds may be added to all aforementioned epidemic models, namely con-stant [, ], continuous-time [, ], impulsive [], mixed concon-stant/impulsive [], mixed continuous-time/impulsive [], discrete-time and so on. Concretely, the research in [] exhaustively analyses the equilibrium points of an SEIR epidemic model under a vaccina-tion strategy based on a state feedback control law with respect to the model parameters and/or the controller gains. The conditions for the eradication of the diseases from the host population, the extinction of the host population or the persistence of the disease in a non-extinguished host population are derived form such a study. Other alternative ap-proaches, as those based on fuzzy rules [] or networks framework [, ], have been also proposed for modelling the epidemics transmission through a host population. In this way, the influence of certain social network parameters such as visiting probability, hub radius and contact radius on the epidemics propagation has been investigated []. Moreover, there are studies about the influence of the immigration on the persistence or extinction of the epidemics in a population subject to immigration from other regions []. Also, the influence of epidemic diseases on the dynamics of prey-predator models has been considered in ecoepidemic models [].
dynamics of susceptible and immune populations are directly affected by a vaccination functionV(t), which also has an indirect influence on the time evolution of exposed and infectious population. In fact, such a vaccination function has to be suitably designed in order to eradicate the infection from the population. This model has already been stud-ied in [] from the viewpoint of equilibrium points in the controlled and free-vaccination cases. A vaccination auxiliary control law proportional to the susceptible population was proposed in order to achieve the whole population being asymptotically immune. Such an approach assumed that the SEIR model was of the aforementioned true-mass action type, its parameters were known and the illness transmission was not critical. Moreover, some important issues of positivity, stability and tracking of the SEIR model were dis-cussed. The main drawback of such a control strategy is the need of online measures of the susceptible, infected, infectious and immune populations. However, the precise on-line measures of susceptible and infected populations are not always feasible in some real situations, while only true measures of the infectious and whole populations are available.
The main motivation of the present paper is to provide a control solution to overcome such a drawback. In this sense, the use of a switching control law coupled with a state observer to synthesise the vaccination function under no precise knowledge of the exact partial pop-ulations which are online estimated by the observer is proposed.Such a law only switches once and in this way the control process is divided into two stages. In the first stage, the so-called observation stage, the control function is identically zero and only the observer is working to reduce the initial difference between the true infectious population measure and the estimated one provided by the own observer below a prescribe threshold. In the second stage, related to a combined observation/control stage, the vaccination function is synthesised by means of an input-output exact feedback linearization technique while the observer is maintained active providing the estimates of the true partial populations. In both stages,the state observer provides online estimations of susceptible and infected pop-ulations through time overcoming the unfeasibility of obtaining true measures of such par-tial populations. Such a combination of a linearization control strategy with a nonlinear observer to online estimate all the partial populations constitutes the main contribution of the paper. Moreover, mathematical proofs about the epidemics eradication based on such a controlled SEIR model coupled with the nonlinear observer are presented while main-taining the non-negativity of all the partial populations for all time.The exact feedback linearization can be implemented by using a proper nonlinear coordinate transformation and a static-state feedback control. The use of such a linearization strategy is motivated by three main facts, namely (i) it is a power tool for controlling nonlinear systems which is based on well-established technical principles [, ], (ii) the given SEIR model is highly nonlinear and (iii) such a control strategy has not been yet applied in epidemic models.
Otherwise, alternative approaches developed to approximately linearize nonlinear sys-tems violating one or more of such assumptions could be used [, ].
The paper is organised as follows. Section describes the set of differential equations which compound the SEIR model for the propagation of an epidemic disease through a host population. A result related to the positivity property of such a model is proven. Sec-tion presents a control acSec-tion based on an input-output linearizaSec-tion technique, guaran-teeing the positivity and stability properties of the system while asymptotically achieving the eradication of the infection from the host population and, simultaneously, the whole population becoming immune. The positivity property is required from the own nature of the system which forbids the existence of negative populations at any time instant. The control strategy requires the knowledge of the susceptible, infected, infectious and whole population for all time. In this context, the knowledge of the infectious and whole popu-lation for all time is feasible, but the knowledge of the susceptible and infected popupopu-lation for all time is not a realistic assumption. As a consequence, such partial populations have to be estimated by means of an observer dynamic system. Then a control action based on such estimates, instead of the corresponding true partial populations, is carried out in Section . These theoretical results and the effectiveness of the feedback input-output linearizing controller combined with the observer are illustrated by means of some simu-lation results in Section .
Notation Rn
+ is the first opennth real orthant andRn+ is the first closednth real or-thant.x∈Rn+ is a positive realn-vector in the usual sense that all its components are non-negative. Also,R+andR+are, respectively, used instead ofRandR+for scalars.
In∈Rn×ndenotes the identity matrix andDet(M) the determinant of the matrixM.
2 SEIR epidemic model
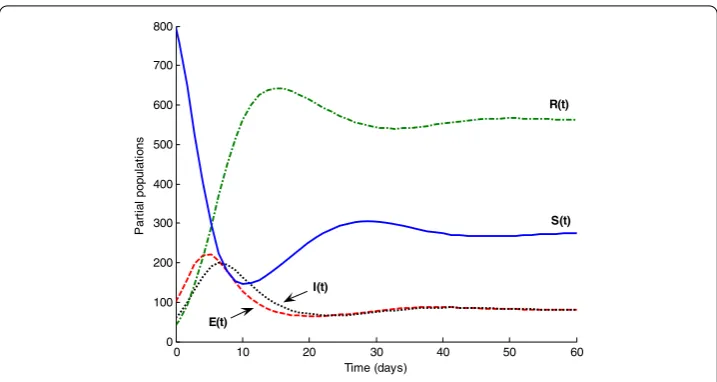
LetS(t),E(t),I(t) andR(t) be, respectively, the susceptible, infected (or exposed), infectious and removed-by-immunity populations at timet. Consider a time-invariant true-mass action type SEIR epidemic model given by the following equations:
˙
S(t) = –μS(t) +ωR(t) –βS(t)I(t)
N +μN
–V(t), (.)
˙
E(t) = –(μ+σ)E(t) +βS(t)I(t)
N , (.)
˙
I(t) = –(μ+γ)I(t) +σE(t), (.)
˙
R(t) = –(μ+ω)R(t) +γI(t) +μNV(t) (.)
subject to initial conditionsS()≥,E()≥,I()≥ andR()≥ under a vaccina-tion funcvaccina-tionV:R+→R+. In the above SEIR model,N> is the total population at any time instantt∈R+,μis the rate of deaths and births from causes unrelated to the infection,ωis the rate of losing immunity,β is the transmission constant (with the to-tal number of infections per unity of time at timetbeingβS(t)IN(t)) and,σ–andγ–are finite and, respectively, the average durations of the latent and infective periods. All the above parameters are assumed to be non-negative. The total population dynamics can be obtained by summing-up both sides of (.)-(.) yielding:
˙
so that the total populationN(t) =N() =Nis constant∀t∈R+. As a consequence, this model is suitable for epidemic diseases with very small mortality incidence caused by in-fection and for populations with equal birth and death rates so that the total population may be considered constant for all time. The following result relative to the positivity of the SEIR model in the absence of vaccination is proven. It is relevant since positivity is required for the model validity in real cases.
Lemma . Assume the SEIR model (.)-(.) with an initial condition subject to
min{S(),E(),I(),R()} ≥and under no vaccination action before a finite time instant t> , i.e. V(t) = ∀t∈[,t). Thenmin{S(t),E(t),I(t),R(t)} ≥∀t∈[,t).
Proof Let eventually existing finite time instantstS∈[,t),tE∈[,t),tI∈[,t) andtR∈ [,t) witht*=min{tS,tE,t
I,tR}being such that:
• Ift*=t
S, thenS(tS) = andmin{S(t),E(t),I(t),R(t)} ≥∀t∈[,tS].
• Ift*=t
E, thenE(tE) = andmin{S(t),E(t),I(t),R(t)} ≥∀t∈[,tE].
• Ift*=t
I, thenI(tI) = andmin{S(t),E(t),I(t),R(t)} ≥∀t∈[,tI].
• Ift*=t
R, thenR(tR) = andmin{S(t),E(t),I(t),R(t)} ≥∀t∈[,tR].
Note that eithert*does not exist or it is the first eventual time instant previous to the finite time instantt> at which some of the partial populations of the SEIR model reach a zero value and can be coincident with at most three of its arguments since the total pop-ulation beingN> is incompatible with the four partial populations being simultaneously zero. The remaining of the proof is split into four parts as follows:
(a) Proceed by contradiction by assuming that there exists a finitet*=t
S∈[,t) such thatS(t)≥∀t∈[,tS),S(tS) = andS(tS+) < (whereS(t+S) < is the value of the function
S(t) at the time instant which is infinitesimally close totS by the right-hand side) with min{E(t),I(t),R(t)} ≥∀t∈[,tS]. Thus,S˙(tS) =ωR(tS) +μN> from (.) sinceV(t) =
∀t∈[,t). The facts thatS(tS) = andS˙(tS) > imply thatS(t+
S) > since the solution of the SEIR model (.)-(.) is continuous for all time. The result contradicts the assumption thatS(t+
S) < and the time instantt*=tS∈[,t) does not exist.
(b) Proceed by contradiction by assuming that there exists a finitet*=t
E∈[,t) such thatE(t)≥∀t∈[,tE),E(tE) = andE(t+E) < withmin{S(t),I(t),R(t)} ≥∀t∈[,tE]. Thus,E˙(tE) = βS(tE)I(tE)
N ≥ from (.). The facts thatE(tE) = andE˙(tE)≥ imply that
E(t+E)≥ since the solution of the SEIR model (.)-(.) is continuous for all time. Such a result contradicts the assumption thatE(t+E) < and the time instantt*=tE∈[,t) does not exist.
(c) Proceed by contradiction by assuming that there exists a finitet*=tI∈[,t) such that I(t)≥∀t∈[,tI), I(tI) = andI(t+I) < withmin{S(t),E(t),R(t)} ≥∀t∈[,tI]. Thus,˙I(tI) =σE(tI)≥ from (.). The facts thatI(tI) = andI˙(tI)≥ imply thatI(t+I)≥ since the solution of the SEIR model (.)-(.) is continuous for all time. Such a result contradicts the assumption that I(t+
I) < and the time instantt*=tI ∈[,t) does not exist.
(d) Proceed by contradiction by assuming that there exists a finitet*=t
R∈[,t) such thatR(t)≥∀t∈[,tR),R(tR) = andR(t+
R) < withmin{S(t),E(t),I(t)} ≥∀t∈[,tR]. Thus,R˙(tR) =γI(tR)≥ from (.) sinceV(t) = ∀t∈[,t). The facts thatR(tR) = and
˙
R(tR)≥ imply thatR(tR+)≥ since the solution of the SEIR model (.)-(.) is continuous for all time. Such a result contradicts the assumption thatR(tR+) < and the time instant
t*=t
As a result, ifmin{S(),E(),I(),R()} ≥ and the vaccination functionV(t) = ∀t∈
[,t) thenmin{S(t),E(t),I(t),R(t)} ≥∀t∈[,t) follows directly since a time instantt*, for which any of the four partial populations reaches a zero value with its first-time deriva-tive being simultaneously negaderiva-tive at such a time instant, does not exist.
Remark . The result ≤min{S(t),E(t),I(t),R(t)} ≤max{S(t),E(t),I(t),R(t)} ≤N ∀t∈
[,t) is implied byLemma ., combined with the equation (.), provided thatV(t) = ∀t∈[,t) and the SEIR model is initialised such that ≤min{S(),E(),I(),R()} ≤ max{S(),E(),I(),R()} ≤N.
3 Vaccination strategy
An ideal control objective is that the removed-by-immunity population asymptotically tracks the whole population. In this way, the joint infected plus infectious population asymptotically tends to zero as time tends to infinity, so the infection is eradicated from the population. A vaccination control law based on a static-state feedback linearization strategy is developed for achieving such a control objective. This technique requires a nonlinear coordinate transformation, based on the theory of Lie derivatives [], in the system representation.
The dynamics equations (.)-(.) of the SEIR model can be equivalently written as the following nonlinear control affine system: as the state vector, the measurable output signal (i.e.the infectious population) and the input signal of the system∀t∈R+, respectively, andR(t) =N–S(t) –E(t) –I(t) is used
where β =β/N. The first step to apply a coordinate transformation based on the Lie derivation is to determine the relative degree of the system. For such a purpose, the fol-lowing definitions are taken into account: (i) Thekth-order Lie derivative ofh(x(t)) along
f(x(t)) isLkfh(x(t))=∂(L
of the system is the number of times that the system output (i.e.the infectious population) must be differentiated in order to obtain the input explicitly,i.e.the numberrsuch that
LgLkfh(x(t)) = fork<r– andLgLr–f h(x(t))= .
From (.),Lgh(x(t)) =LgLfh(x(t)) = , whileLgLfh(x(t)) = –μσβI(t), so the relative de-gree of the system is inD={x= [I E S]T∈R
the singular surfaceI= of the state space where the relative degree is not well defined. Since the relative degree of the system is exactly equal to the dimension of the state space for anyx∈D, the nonlinear coordinate change defined as follows:
¯
transformation (.) and an exact linearization feedback control [, ]. The following result being relative to the input-output linearization of the system is established.
Theorem . The state feedback control law defined as
u(t) =
whereλifor i∈ {, , }are the controller tuning parameters, induces the linear closed-loop
dynamics given by
...
y(t) +λy¨(t) +λy˙(t) +λy(t) = (.)
around any point x∈D.
Proof The following state equation for the closed-loop system is obtained: ⎡
by introducing the control law (.) in (.) and taking into account the coordinate trans-formation (.) and the fact thatLgLfh(x(t)) = –μσβI(t) = –μσβ¯I(t)= ∀x∈D. Moreover, ordinate transformation in (.). Then it follows directly thatL
fh(x(t)) =ϕ(x¯(t)). Thus, the state equation of the closed-loop system in the state space defined byx¯(t) can be written as
Remarks .
(i) The controller parametersλi, fori∈ {, , }, will be adjusted so that the roots of the closed-loop system characteristic polynomialP(s) =Det(sI–A) are located at prescribed positions,i.e.λi=λi(–rj) fori∈ {, , } andj∈ {, , }, with (–rj) denoting the desired roots ofP(s). If one of the control objectives is to guarantee the exponential stability of the closed-loop system, then all roots ofP(s) = (s+r)(s+r)(s+r) have to be in the open left-half plane,i.e.Re{rj}> for allj∈ {, , }. Then the valuesλ=rrr> ,λ=
rr+rr+rr> andλ=r+r+r> for the controller parameters have to be chosen in order to achieve such a stability result. It implies that the strict positivity of the controller parameters is a necessary condition for the exponential stability of the closed-loop system.
(ii) The control (.) may be rewritten as follows:
u(t) =(μ+ω)σβ– (μ+γ) +λ
–λ(μ+γ) +λ(μ+γ) μσβ
– ω μN
I(t) +E(t)–(μ+σ+ γ –λ) μN S(t)
+(μ+γ)
+ (μ+σ+γ)(μ+σ) +λ–λ(μ+σ+γ) μβ
E(t)
I(t)
+ σ μN
E(t)S(t)
I(t) – β
μNI(t)S(t) (.)
by using (.) and (.), or
u(t) = μσβ¯I(t)
ϕx¯(t)+λ¯I(t) +λE¯(t) +λS¯(t)
= μσβ¯I(t)
ϕx¯(t)+Tx¯(t), (.)
where= [λλλ]Tis the control parameters vector, by using (.) and the facts that
L
fh(x(t)) =ϕ(x¯(t)) andLgLfh(x(t)) = –μσβ¯I(t).
(iii) The control law (.) is well defined for allx∈R
+except in the surfaceI= . How-ever, the infection may be considered eradicated from the population once the infectious population strictly exceeds zero while it is smaller than one individual. So the vaccination strategy may be switched off when <δ≤I(t)≤δ< . This fact implies that the singular-ity in the control law is not going to be reached,i.e.such a control law is well defined by the nature of the system. In this sense, the control law given by
up(t) = ⎧ ⎨ ⎩
u(t) for ≤t≤tf, fort>tf
(.)
may be used instead of (.) in a practical situation. The signalu(t) in (.) is given by the linearizing control law (.) whiletf denotes the eventual time instant after which the infection propagation may be assumed ended. Formally, such a time instant is defined as follows:
tf
In this way, the control action is maintained active while the infection persists within the host population and it is switched off once the epidemics is eradicated.
(iv) The linear system (.) is strictly identical to the SEIR model (.)-(.) under the transformation (.) and the control law (.) for ≤t≤tf,i.e.until the time instant at which the epidemics is eradicated.
(v) The implementation of the control law (.) requires online measurement of the sus-ceptible, infected and infectious population. In a practical situation, only online measures of the infectious and whole populations may be feasible, so the populations of susceptible and infected can only be estimated. In this context, a complete state observer is going to be designed for such a purpose in Section .
3.1 Controller tuning parameters choice
The application of the control law (.), obtained from the exact input-output linearization strategy, makes the closed-loop dynamics of the infectious population be given by (.). Such a dynamics depends on the control parametersλifori∈ {, , }. Such parameters have to be appropriately chosen in order to guarantee the following suitable properties: (i) the stability of the controlled SEIR model, (ii) the eradication of the infection,i.e.the asymptotic convergence ofI(t) andE(t) to zero as time tends to infinity and (iii) the posi-tivity property of the controlled SEIR model under a vaccination based on such a control strategy. The following theorems related to the choice of the controller tuning parameter valuesλifori∈ {, , }are proven, in order to meet such properties under an eventual vaccination effort.
Theorem . Assume that the initial condition x() = [I()E()S()]T∈R
+is bounded,
and all roots(–rj)for j∈ {, , }of the characteristic polynomial P(s)associated with the closed-loop dynamics (.) are of strictly negative real part via an appropriate choice of the free-design controller parametersλi> for i∈ {, , }. Then the control law (.)
guar-antees the exponential stability of the transformed controlled SEIR model (.)-(.) while achieving the eradication of the infection from the host population as time tends to infin-ity. Moreover, the SEIR model (.)-(.) has the following properties: E(t), I(t), S(t)I(t)and S(t) +R(t) =N– [E(t) +I(t)]are bounded for all time, E(t)→, I(t)→, S(t) +R(t)→N and S(t)I(t)→exponentially as t→ ∞, and I(t) =o(/S(t)).
Proof The dynamics of the controlled SEIR model (.) can be equivalently rewritten with the state equation (.) and the output equation y(t) =Cx¯(t), whereC= [ ], by taking into account thaty(t) =I¯(t), y˙(t) =E¯(t) and y¨(t) =S¯(t). The initial condition
¯
x() = [I¯()E¯()S¯()]Tin such a realization is bounded since it is related tox()viathe coordinate transformation (.), andx() is assumed to be bounded. The controlled SEIR model is exponentially stable since the eigenvalues of the matrixAare the roots (–rj) for
j∈ {, , } ofP(s) which are assumed to be in the open left-half plane. Then the state vectorx¯(t) exponentially converges to zero as time tends to infinity while being bounded for all time. Moreover,I(t) andE(t) are also bounded and converge exponentially to zero ast→ ∞from the boundedness and exponential convergence to zero ofx¯(t) ast→ ∞
according to the first and second equations of the coordinate transformation (.). Then the infection is eradicated from the host population. Furthermore, the boundedness of
ast→ ∞is derived from the exponential convergence to zero ofI(t) andE(t) ast→ ∞, and the fact thatS(t) +E(t) +I(t) +R(t) =N∀t∈R+. Finally, from the third equation of (.), it follows thatS(t)I(t) is bounded and it converges exponentially to zero ast→ ∞
from the boundedness and convergence to zero ofI(t),E(t) andx¯(t) ast→ ∞. The facts thatI(t)→ andS(t)I(t)→ ast→ ∞imply directly thatI(t) =o(/S(t)).
Remark . Theorem .implies the existence of a finite time instanttf after which the epidemics is eradicated if the vaccination control law (.) is used instead of that in (.). Concretely, such an existence derives from the convergence ofI(t) to zero ast→ ∞via
the application of the control law (.).
Theorem . Assume that an initial condition for the SEIR model satisfies R()≥, x()∈
R
+, i.e. I()≥, E()≥and S()≥, and the constraint S() +E() +I() +R() =N .
Assume also that some strictly positive real numbers rjfor j∈ {, , }are chosen such that
(a) <r<μ+min{σ,γ},r=μ+γ andr>μ+max{σ,γ}, so thatr>r>r> ,
(b) randrsatisfy the inequalities:
⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩
r+r≥μ+σ+γ +β–ω,
rr≥(μ+σ)(r+r) + (γ –σ)(μ+σ+γ) – (μ+γ), (r–r)(r–μ–γ)≥σβ.
Then
(i) the application of the control law (.) to the SEIR model guarantees that the epidemics is asymptotically eradicated from the host population whileI(t)≥, E(t)≥andS(t)≥∀t∈R+, and
(ii) the application of the control law (.) guarantees the epidemics eradication after a finite timetf, the positivity of the controlled SEIR epidemic model∀t∈R+and that
u(t) =V(t)≥∀t∈[,tf)so thatu(t)≥∀t∈R+,
provided that the controller tuning parametersλifor i∈ {, , }are chosen such that(–rj)
for j∈ {, , }are the roots of the characteristic polynomial P(s)associated with the closed loop dynamics (.).
Proof
(i) On the one hand, the epidemics asymptotic eradication is proven by following the same reasoning as inTheorem .. On the other hand, the dynamics of the controlled SEIR model (.) can be written in the state space defined byx¯(t) = [¯I(t)E¯(t)S¯(t)]Tas in (.). From such a realization, taking into account the first equation in (.) and the fact that (–rj) forj∈ {, , }are the eigenvalues ofA, it follows that
I(t) =¯I(t) =y(t) =ce–rt+ce–rt+ce–rt ∀t∈R+ (.)
equations:
where (.) and (.) have been used. Such equations can be more compactly written as
Rp·K=M, where
where the facts thatI() =c+c+c≥ and,e–rt–e–rt≥ ande–rt–e–rt≥∀t∈R+ have been used. In particular, the coefficient multiplying toI() in (.) is non-negative if
randrsatisfy the third inequality of the constraints (b) by taking into accountσβS() = σβS()N ≤σβandS()≤N. This later inequality is directly implied byI()≥,E()≥, populations are initially non-negative and the roots (–rj) forj∈ {, , }of the closed-loop characteristic polynomial satisfy the constraints in (a) and (b). On the other hand, one obtains by direct calculations from (.) and (.) that
where the fact that the functionH:R+→Rdefined by
H(v) =v– (μ+σ+γ)v+ (μ+σ)(μ+γ) (.)
is zero forv=r=μ+γ has been used. From the first equation in (.), it follows that
c(μ+γ –r) =σE() –c(μ+γ–r) and then
E(t) = σ
c(μ+γ–r)e–rt–e–rt+σE()e–rt≥ ∀t∈R+ (.)
by applying such a relation betweenc andc in (.) and by taking into account that
c(μ+γ –r) > , E()≥ ande–rt–e–rt ≥∀t∈R+ sincer<r. In this way, the non-negativity ofE(t) has been proven. From the second equation in (.), it follows that
cH(r) =σβI()S() –cH(r) and then
S(t) = σβI(t)
cH(r)
e–rt–e–rt+σβI()S()e–rt
≥ ∀t∈R+ (.)
by applying such a relation betweenc andc in (.) and by taking into account that
cH(r) > sincer<μ+min{σ,γ},I()≥,S()≥, andI(t)≥ ande–rt–e–rt≥
∀t∈R+sincer<r. In this way, the non-negativity ofS(t) has been proven. Note that the functionH(v) defined by (.) is an upper-open parabola zero-valued forv=μ+σ andv=μ+γ soH(r) > from the assumption thatr<μ+min{σ,γ}.
(ii) On the one hand, if the control law (.) is used instead of that in (.), then the time evolution of the infectious population is also given by (.) while the control action is active. Thus, the exponential convergence ofI(t) to zero ast→ ∞in (.) implies directly the existence of a finite time instant tf at which the control (.) switches off. Obviously, the non-negativity ofI(t),E(t) andS(t)∀t∈[,tf] is proven by following the same reasoning used in the part (i) of the current theorem. The non-negativity ofR(t)
∀t∈[,tf] is proven by using continuity arguments. In this sense, ifR(t) reaches negative values for some t∈[,tf] starting from an initial conditionR()≥, thenR(t) passes through zero,i.e.there exists at least a time instantt∈[,tf) such thatR(t) = . Then it follows from (.) that
˙
R(t) =γI(t) +μNV(t)
=γI(t) +μσβ+λ–λ(μ+γ) +λ(μ+γ)
– (μ+γ)
σβ N
+ (λ+ω– μ–σ– γ)S(t)
+(μ+γ)
+ (μ+σ+γ)(μ+σ) +λ
–λ(μ+σ+γ)
β N
E(t)
I(t)
+σE(t)S(t)
I(t) – β
NI(t)S(t) (.)
by introducing the control law (.) and taking into account the facts thatV(t) =u(t) and
I(t) +E(t) +S(t) =NsinceR(t) = has been used. Moreover, the non-negativity ofI(t),
one obtains
˙
R(t)≥γI(t) +μσβ+λ–λ(μ+γ) +λ(μ+γ)
– (μ+γ)
σβ N
+ (λ+ω– μ–σ– γ–β)S(t)
+(μ+γ)
+ (μ+σ+γ)(μ+σ) +λ
–λ(μ+σ+γ)
β N
E(t)
I(t)
+σE(t)S(t)
I(t) (.)
from (.). The controller tuning parameters λifori∈ {, , }are related to the roots (–rj) forj∈ {, , }of the closed-loop characteristic polynomialP(s), seeRemark . (i), by
λ=rrr; λ=rr+rr+rr; λ=r+r+r. (.)
The assignment ofrjforj∈ {, , }such that the constraints in (a) and (b) are fulfilled implies that
λ+ω– μ–σ– γ–β≥,
(μ+γ)+ (μ+σ+γ)(μ+σ) +λ–λ(μ+σ+γ)≥, (.) μσβ+λ–λ(μ+γ) +λ(μ+γ)– (μ+γ)=μσβ≥.
ThenR˙(t)≥ by taking into account (.) in (.). The facts thatR(t)≥∀t∈[,t),
R(t) = andR˙(t)≥ imply thatR(t)≥∀t∈[,tf]viacomplete induction. Finally, the positivity of the controlled SEIR model∀t∈R+follows from the non-negativity ofI(t),
E(t),S(t) andR(t)∀t∈[,tf] andLemma ..
On the other hand, it follows from (.) and (.) that
u(t) =μσβ– (μ+γ) +λ
–λ(μ+γ) +λ(μ+γ) μσβ
+ ω μNR(t) –
(μ+σ+ γ –ω–λ)
μN S(t)
+(μ+γ)
+ (μ+σ+γ)(μ+σ) +λ
–λ(μ+σ+γ) μβ
E(t)
I(t)
+ σ μN
E(t)S(t)
I(t) – β
μNI(t)S(t) (.)
∀t∈[,tf] by taking into account thatS(t) +E(t) +I(t) +R(t) =N. Moreover,
u(t)≥μσβ– (μ+γ) +λ
–λ(μ+γ) +λ(μ+γ)
μσβ +
λ+ω– μ–σ– γ –β
μN S(t)
+(μ+γ)
+ (μ+σ+γ)(μ+σ) +λ
–λ(μ+σ+γ) μβ
E(t)
where the facts that <δ≤I(t)≤N,E(t)≥,S(t)≥ andR(t)≥∀t∈[,tf] have been used. If the roots of the polynomialP(s) satisfy the conditions in (a) and (b), it follows from (.) that
u(t)≥ +λ+ω– μ–σ– γ–β
μN S(t)
+(μ+γ)
+ (μ+σ+γ)(μ+σ) +λ
–λ(μ+σ+γ) μβ
E(t)
I(t) ≥ (.)
∀t∈[,tf] by taking into account the third equation in (.) and the non-negativity ofS(t),E(t) andI(t)∀t∈[,tf]. Finally, it follows thatu(t)≥∀t∈R+from (.) and
(.).
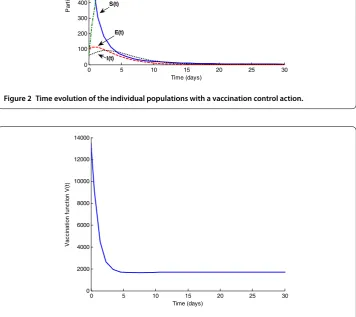
In summary, this section has dealt with a vaccination strategy based on linearization control techniques for nonlinear systems. The proposed control law satisfies the main objectives required in the field of epidemics models, namely the stability, the positivity and the eradication of the infection from the population. Such results are proven formally inTheorems .and.. In Section , some simulation results illustrate the effectiveness of such a vaccination strategy. However, such a strategy has a main drawback, namely the control law needs the knowledge of the true values of the susceptible, infected and infectious populations at all time instants which are not available in certain real situations. An alternative approach useful to overcome such a drawback is dealt with in the following section where an observer to estimate all the partial populations is proposed.
4 Vaccination control strategy based on the use of a state observer
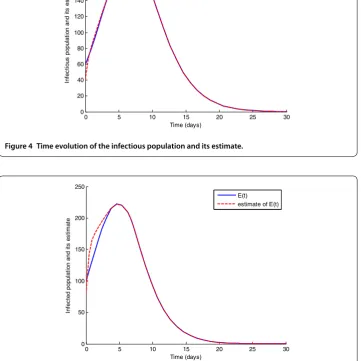
The control laws (.), or equivalently (.) or (.), and (.) require the online mea-surement of all the state variables, namelyI(t),E(t) andS(t). However, the online measures of the infected and susceptible populations are rarely affordable in certain real situations where only knowledge about the infectious and total populations may be available. As a consequence, the control laws (.) and (.) may not be implemented. An alternative approach involving the use of a complete state observer is proposed.This observer pro-vides online estimatesˆI(t),Eˆ(t) andSˆ(t) of the true state variables. Such estimates are used instead ofI(t),E(t) andS(t) for the implementation of the switching control law given by
u(t) = ⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩
, ≤t<t,
ul(t), t≤t≤tf, , t>tf
(.)
withul(t) defined as follows:
ul(t) = μσβˆ¯I(t)
ϕxˆ¯(t)+λIˆ¯(t) +λEˆ¯(t) +λSˆ¯(t)
= μσβˆ¯I(t)
ϕxˆ¯(t)+Txˆ¯(t), (.)
i.e. tandtf are defined as follows: sponding to the infectious population,i.e.the deviation between the infectious population estimated by the observer and the true one. Note thate¯I(t)
=ˆ¯I(t) –I¯(t) =ˆI(t) –I(t)=eI(t) fromI¯(t) =I(t), and then alsoˆ¯I(t) =Iˆ(t), by taking into account the coordinate change (.) or (.). In other words, the estimation error associated to the infectious population is identical in both system representations, defined, respectively, by (.)-(.) and (.)-(.). The signal (.) has the same structure as the control law (.) used for linearizing the SEIR model in the case where the measures of all partial populations were available. Note that the control law (.)-(.) is expressed in terms of the variables ofxˆ¯(t) since the observer design is developed based on the system representation (.)-(.). Moreover, the observer has to be designed in such a way that the estimation error converged rapidly to zero while maintaining the stability, positivity and epidemics eradication objectives.
The SEIR model (.)-(.) is diffeomorphic on D to the system (.)-(.) by applying the nonlinear coordinate transformation (.). In the system representation (.)-(.) the functionsf¯(x¯(t)) andg¯(x¯(t)) fit into the called normal form given by SEIR model isuniformly observable on D for any inputin view ofTheorem of []. This property allows constructing an observer in the coordinates corresponding to the state representation (.)-(.). The state equation of such an observer is as follows:
˙ˆ¯
x(t) =f¯xˆ¯(t)+g¯xˆ¯(t)u(t) –L–CTCxˆ¯(t) –y(t) (.)
with an initial condition xˆ¯() = [ˆ¯I()Eˆ¯()Sˆ¯()]T. The matrix L∈R× is the unique positive-definite symmetric solution of the algebraic Lyapunov equation below
CTC–θL–TL–L= → L=
The following result relative to the existence of a finite time instanttdefined as in (.) is proven.
Lemma . Assume that
(i) The SEIR model parameters are such thatσβ≥(μ+γ)(μ+σ), (ii) δI> in the definition of the switching time instanttsatisfies
δI<(μβ+[σ ωω)[+(σβμ+–(γμ)(+μσ+)(σμ++ωγ)])]N,
(iii) the control parameterλin (.) and the constantεu> in the definition oftare
such thatλ>μσβεu, and
(iv) the observer gainθ> is large enough for the estimation error ¯
e(t)=xˆ¯(t) –x¯(t) = [¯eI(t)e¯E(t)e¯S(t)]T, withe¯E(t)
=Eˆ¯(t) –E¯(t)ande¯S(t)
=Sˆ¯(t) –S¯(t), to converge asymptotically to zero ast→ ∞.
Then a finite time instant tat which the control law (.) switches for the first time exists.
Proof On the one hand, note that the functions g¯(x¯(t)) =g¯(x¯(t)) = and g¯(x¯(t)) = –μσβI¯(t) in (.) are globally Lipschitz [] onD⊂R. Then the observer (.) for the SEIR model is well defined in the sense that it guarantees the asymptotic convergence to zero of the estimation error ast→ ∞provided thatu(t) is uniformly bounded∀t∈R+ and the gainθ> is large enough in view of Theorem of []. Such a result implies that e¯(t)≤K(θ)e–()θte¯() ∀t∈[,t) (.)
for some definite positive functionK(θ) ifθ> is large enough sinceu(t) = ∀t∈[,t). Then there exists a finite time instantt∈R+such that|¯eI(t)| ≤εI fort∈[t,t), with
tbeing the eventual time instant at which the control law switches for the first time and εI> any real constant. Note thatt=t(εI) andlimεI→{t(εI)}=∞. Furthermore, the convergence rate ofe¯(t) depends on the value of the observer gainθ in the sense that such a convergence rate is increased as the observer gain increases.
The existence of the finite time instant t≥t at which the control law switches is demonstrated below ad absurdum. In this sense, suppose that there are no time instants
t≥tsuch thatI(t)≥δI andul(t)≥εufor some real constantsδI> andεu> satisfy-ing the constraints (ii) and (iii) respectively. Thenu(t) = ∀t≥tfrom (.). As a con-sequence, on the one hand, the SEIR model converges to its endemic equilibrium point
x*= [I*E*S*]Tdefined by the following partial populations []:
I*=(μ+ω)[σβ– (μ+σ)(μ+γ)]
β[σ ω+ (μ+γ)(μ+σ+ω)] N; E
*=(μ+γ)
σ I
*;
S*=(μ+σ)(μ+γ)
σβ N
(.)
since the fact that the SEIR parameters fulfil the conditionσβ≥(μ+γ)(μ+σ) has been as-sumed. The convergence ofI(t) toI*as time tends to infinity implies directly the existence of a finite time instantt≥tsuch thatI(t)≥δI ∀t≥tsinceI*=(
μ+ω)[σβ–(μ+σ)(μ+γ)]
β[σ ω+(μ+γ)(μ+σ+ω)]N>δI in view of constraint (ii). On the other hand, ifu(t) = ∀t∈R+, thene¯(t) tends asymptot-ically to zero as time tends to infinity from (.). As a consequence,xˆ¯(t) converges asymp-totically tox¯(t) as time tends to infinity. Furthermore,x¯(t) converges tox¯*= [¯I*E¯*S¯*]T, which denotes the endemic equilibrium point in the state space realization defined by
¯
equi-librium point. Thenxˆ¯(t) also converges tox¯*as time tends to infinity. As a consequence,
provided that the parametersλandεusatisfy the constraint (iii) and by taking into ac-count thatI¯*=I*,E¯*= ,S¯*= andϕ(x¯*) = from (.), (.) and (.). Thus, (.) shows the existence of a finite time instantt≥tsuch thatul(t)≥εu∀t≥t. As a consequence, there exists a finite time instantt=max{t,t} ≥t at which the control law switches, which contradicts the starting hypothesis.
Remark . Lemma .requires the SEIR model parameters to fulfil the conditionσβ≥ (μ+γ)(μ+σ) so that the endemic equilibrium point exists. Otherwise,i.e.if the param-eters are such that σβ< (μ+γ)(μ+σ), the SEIR model converges to the disease-free equilibrium pointx*
df = [ N]T at which all the population is susceptible and no indi-vidual is either infected or infectious so a control action is not necessary to eradicate the epidemic. Then such a situation is not interesting from the control theory viewpoint.
The following result, supported byLemma .,Theorem .andLemma ., is relative to the eradication of the epidemicviathe application of the control law (.)-(.) while guaranteeing the non-negativity of the control signal for all time.
Theorem . Assume that
(i) The SEIR model parameters are such thatσβ≥(μ+γ)(μ+σ), (ii) its initial condition satisfies
<min{S(),E(),I(),R()} ≤max{S(),E(),I(),R()}<N,
(iii) δI> in the definition of the switching time instanttand the SEIR model
parameters are such that(βμ[+σ ωω)[+(σβμ–(+γμ)(+μσ+)(σμ++ωγ)])]N>δI, withδI> large enough, chosen such that the conditions (a)-(b) of Theorem . are fulfilled whileλ>μσβεu
for some sufficient large real constantεu> .
Then the control law (.)-(.) combined with the observer (.)-(.) leads to the eradication of the epidemics while guaranteeing the non-negativity of the control signal ∀t∈R+.
sinceL–CT= [θ θθ]TandCxˆ¯(t) –y(t) =ˆ¯I(t) –I¯(t) =e¯
I(t) =eI(t). The state equation of the SEIR model in the state space realization (.)-(.) can be rewritten as follows:
˙¯
Then the error dynamics between (.) and (.) becomes
After the control law switches at the time instantt, the closed-loop dynamics of the
where the control law (.)-(.) has been introduced in (.) andtf denotes the eventual time instant at which the epidemics is eradicated.
On the one hand, the definition oftand continuity arguments of the functions|¯eI(t)|,
|¯eE(t)|and|¯eS(t)|imply that there exits some definite-positive, monotone functionTe=
Te(εI), decreasing withεIand satisfyinglimεI→{Te(εI)}=∞, such that|¯eI(t)|< ,|¯eE(t)|< and|¯eS(t)|< ∀t∈[t,t+Te) since|¯eI(t)| ≤εI from the assumption (iv) of the current theorem. Furthermore,Lemma .and the definition oftin (.) guarantee that
Finally, the definition oftalso implies thatul(t) =Mu≥εu> . Then by using continu-ity arguments of the functionul(t)∀t∈R+, or continuity arguments ofu(t)∀t≤t≤tf, there exists some definite-positive, monotone function Tu=Tu(εu), increasing with εu and satisfyinglimεu→∞{Tu(εu)}=∞, such thatu(t) =ul(t)≥∀t∈[t,t+Tu). Then from (.), (.) and (.)-(.), it follows that
˙
W(t)≤ ˙W(t) +Wϕ˙ (t)+W˙u(t)
≤ ˙W(t) +θ–e¯I(t) – θ–e¯E(t) + θ–¯eS(t)KI¯eI(t)+KE¯eE(t)+KSe¯S(t)
–μσβθ–e¯I(t) – θ–e¯E(t) + θ–¯eS(t)¯eI(t)ul(t)≤ ∀t∈[t,t+Tm) (.)
with Tm
=min{T,Tu}=min{Te,TI,Tu}, if the observer gainθ is large enough for both
˙
W(t)≤ and [e¯I(t) – θ–e¯E(t) + θ–e¯S(t)]e¯I(t)≥ to be guaranteed∀t∈[t,t+Tm). In this context, on the one hand, note that all terms of W˙(t) in (.), except the one with θ–¯e
E, are strictly negative whenevere¯I(t)= ,e¯E(t)= ande¯S(t)= for any ob-server gainθ > . Such a term θ–¯eE may be made small enough, in comparison with the absolute value of the contribution of the rest of the terms in W˙(t), by means of a large enough observer gain θ > so that W˙(t)≤ ∀t∈[t,t +Tm). On the other hand, [e¯I(t) – θ–e¯E(t) + θ–e¯S(t)]¯eI(t)≥ can be also ensured with a large enough ob-server gainθ > . In this case, the term depending onul(t) in (.) is strictly negative
∀t∈[t,t+Tm) sinceul(t)≥ in such a time interval. Note also thatθ–|¯eI(t) – θ–e¯E(t) + θ–e¯
S(t)|(KI|¯eI(t)|+KE|¯eE(t)|+KS|¯eS(t)|), which is non-negative∀t∈[t,t+Tm), may be made small in comparison with the absolute value of the rest of the terms in (.) by using a sufficiently largeθ> so thatW˙ (t)≤∀t∈[t,t+Tm).
From (.) and the definition of the Lyapunov function candidateW(t), if follows that
¯e(t)is monotone decreasing∀t∈[t,t+Tm) and that|¯eI(t)|is also monotone decreasing
∀t∈[t,t+Tm) with|¯eI(t)|=εI from the definition of the time instantt. Then from (.), it follows that
xˆ¯(t)≤Ke–r(t–t)xˆ¯(t)+Kθθ+ θ+ ! t
t
e–r(t–τ)e¯ I(τ)dτ
∀t≤t<t+Tm (.)
sincer> is the absolute value of the dominant eigenvalue of the state matrixAin (.), according to condition (vi) of the theorem, and whereK≥ is some upper-bound of the transition matrix associated to the system (.). Moreover,|¯eI(t)| ≤ ¯εIe–ρ(t–t)∀t∈[t,t+
Tm) for some real constantsε¯I >εI > andρ> from the fact that|¯eI(t)|is monotone decreasing∀t∈[t,t+Tm). The constantρ> is related to the observer gainθ> in the sense thatρcan be as large asθ. Then from (.), one obtains that
xˆ¯(t)≤Ke–r(t–t)xˆ¯(t)+Kε¯
Ie–rte–ρt ! t
t
e(r–ρ)τdτ
=Ke–r(t–t)xˆ¯(t)+ K
ε¯
I
r–ρ
provided thatρ=r. Note that ifρ=rsatisfies|¯eI(t)| ≤ ¯εIe–ρ(t–t)∀t∈[t,t+Tm), then any <ρ<r also satisfies it. From (.), the population estimates vectorxˆ¯(t) would converge asymptotically to zero ast→ ∞. As a consequence, if the time intervalTm is sufficiently large for the conditions (.), (.) andul(t)≥∀t∈[t,t+Tm), (.) be satisfied until reaching a time instanttf at whichˆ¯I(tf) =Iˆ(tf)≤δI, then the propagation of the infection will be eradicated from the population by taking into account that¯eI(tf) =
ˆ¯
I(tf) –¯I(tf) is very small, while maintaining the positivity of the controlled SEIR model.
Remarks .
(i) The observer dynamics consists of a copy of that of the system model in the trans-formed state representationx¯(t) = [¯I(t)E¯(t)S¯(t)]T with an additional term proportional to the observation erroryˆ¯(t) –y(t) =Cxˆ¯(t) –y(t). Moreover, such a corrective term does not depend on the system realization, but only on the dimension of the state space since
Cxˆ¯(t) =ˆ¯I(t) =ˆI(t) =Cxˆ(t) according to the coordinate transformation (.).
(ii) The control strategy described by (.)-(.) is composed of two consecutive stages. The first one is an observation stage at which no control action is applied to the SEIR model and the main objective is that the observer variables go converging to the true partial pop-ulations. Once the estimation error is sufficiently small, such that the observer variables track the true population with a suitable precision, this observation stage ends. Then the second stage at which a control action is applied begins. Such a control action linearizes the closed-loop observer so that the estimated variables converge asymptotically to zero as time grows while also guaranteeing the convergence to zero of the estimation error. This implies that the true infectious and infected populations decrease toward zero as time grows until reaching a finite time instanttfwhen the epidemic disease is considered eradicated from the host population. After such an instant, the control action is removed from the system.
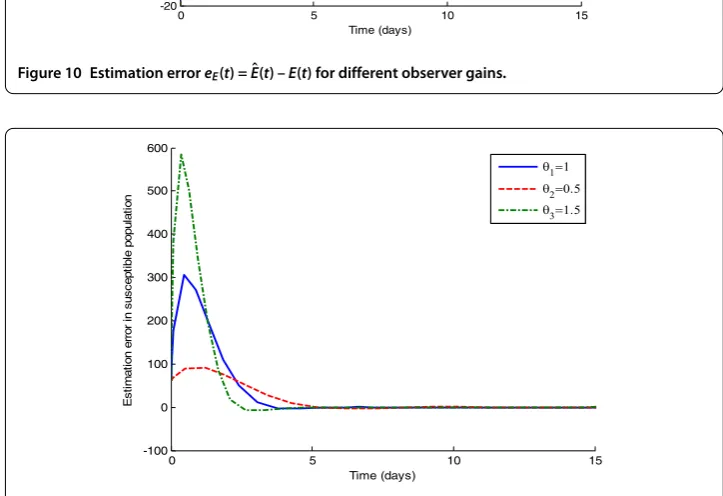
(iii) On the one hand, the length of the observation stage may be short enough with a suitable choice of the observer gain. In this sense, such a length decreases as the value of the observer gain θ increases. Then a large value for θ seems to be appropriate. On the other hand, a large value ofθ makes the contribution of the perturbation term [θθθ]Te¯
I(t) in (.) considerable. As a consequence, a tradeoff value forθ has to be searched. In this context, in the limiting case thatθwas a very small positive real number (i.e.θ→+) the closed-loop dynamics of the observer system would bex˙ˆ¯=Axˆ¯withA de-fined in (.),i.e.such a dynamics would be identical to that of the closed loop SEIR model without the observer. As a consequence, if the controller parametersλifori∈ {, , }were chosen according to the conditions ofTheorem ., the estimates inxˆ(t) would be non-negative∀t∈R+ andˆI(t) would tend asymptotically to zero as time tends to infinity. However, the estimation error andI(t) would not converge asymptotically to zero as time tends to infinity with such a value ofθ→+, so the infection would not be eradicated. On the contrary, if the value forθ> were very large, then a very small real constantεI> would be necessary for the term [θ θ θ]Te¯I(t), which acts as a perturbation for the observer closed-loop system (.), to be sufficiently small. Such a fact would delay the beginning of the control action.