SINGULARITY ANALYSIS AND
COMPARITIVE STUDY OF SIX
DEGREE OF FREEDOM STEWART
PLATFORM AS A ROBOTIC ARM BY
HEURISTIC ALGORITHMS AND
SIMULATED ANNEALING
ASHWIN MISHRA
Department of Mechanical Engineering, Sardar Vallabhbhai National Institute of Technology, Surat 395007, Gujarat, India
DR. S. N. OMKAR
Department of Aerospace Engineering, Indian Institute of Science Bangalore 560012, Karnataka, India
Abstract
In this study singularity analysis of the six degree of freedom (DOF) Stewart Platform using the various heuristic methods in a specified design configuration has been carried out .The Jacobian matrix of the Stewart platform is obtained and the absolute value of the determinant of the Jacobian is taken as the objective function, and the least value of this objective function is fished in the reachable workspace of the Stewart platform so as to find the singular configurations. The singular configurations of the platform depend on the value of this objective function under consideration, if it is zero the configuration is singular. The results thus obtained by different methods namely the genetic algorithm, Particle Swarm optimization and variants and simulated annealing are compared with each other. The variable sets considered are the respective desirable platform motions in the form of translation and rotation in six degrees of freedom. This paper hence presents a proper comparative study of these algorithms based on the results that are obtained and highlights the advantage of each in terms of computational cost and accuracy.
Keywords:
Stewart Platform, parallel, manipulator, singularity, robotic, Genetic, particle swarm optimization, simulated
annealing, quantum, weighted quantum.
1. Introduction
Automated manipulation and real time motion simulation in three dimensional spaces has been a challenge to the mankind for some time now. This motion simulation can be carried out using either series or parallel configurations of mechanisms. Stewart platform is one of the most popularly used configurations among such setups. A lot of research has been carried out since 1956 when the Stewart platform (parallel manipulator) was reported for the first time in a paper by Gough (1956) and hence it is popularly also known as the Stewart Gough platform.
The Stewart platform, which is a six degree of freedom (DOF) system, is an example of a parallel robot [Stewart (1965)]. It is an assembly of six leg actuators connecting the base of the system to the platform manipulator via six prismatic joint actuators at the base of the manipulator and six universal and six prismatic joint actuators (UPS) or six spherical joint actuators (SPS) on the plate end. It has varied applications in the fields of flight simulators [Dongsu and Hongbin (2007)], precision surgery and neuroendoscopy [Wapler et al. (2003a], CNC
Parallel manipulators have various advantages over serial robots such as large workspace, high payload to weight ratio, better accuracy and high rigidity as cited by Degani and Wolf (2006). On the other hand parallel manipulators have a relatively small workspace and comparatively complex kinematics.
While we look at the advantages which the Stewart platform offers and its varied applications, it faces the challenges of singularity occurrence, accuracy control, vibrations [Abicht et al. (2002)], and workspace
restrictions [Bessala et al. (1996)].
Singularity has been referred by Simaan and Shoham (2003b) as the configuration in which the “relation between the input variables velocities (active joints speeds) and the output variables velocities (linear/angular velocities of end effector) is not fully defined at a particular configuration which results in a sudden change in the number of degrees of freedom”.
Singularity basically refers to those positions at which the system is no longer rigid and there are certain directions in the Cartesian space along which the system cannot support a force or movement [Cleary and Arai (1991)]. At such configurations, the platform becomes incapable of taking loads and is unable to facilitate the movements for which it is actually designed for. While on occurrence of singularity in a series manipulator the system loses a degree of freedom, in a parallel configuration it gains a degree of freedom.
Singularity determination can be carried out in a number of ways. [Zhao et al. (2009)] have proposed a method
using reciprocal screw system, [Pendar et al. (2008)] have used infinite constraint plane method, [Kim and Lee (1998)] developed an alternative Jacobian matrix using local structurization method and [Su and Duan (2003c)] have carried out singularity analysis using genetic algorithm.
In the presentation of our findings we further the process of singularity analysis of the Stewart platform which is already carried out using genetic algorithm [Su and Duan (2003c)].We use particle swarm optimization, a popular nature inspired technique, and its variants for the analysis of Stewart platform. A probabilistic metaheuristic method called simulated annealing is also used for this purpose. Finally, the purpose of this study is to make a comparative study of these nature inspired techniques.
In this paper we shall present the introduction to the problem and its mathematical interpretation in the form of Jacobian calculation which shall be followed by relevant example in context. Next, the adopted methodology for analysis are carried out and minimal values of the objective function are derived and results are discussed giving us an estimate of their abilities to find the solution and the corresponding computational time required in regard to the nature inspired techniques. The results will be followed by a logical conclusion and contribution in better understanding of the problem.
2. Jacobian Matrix Calculation
Let us consider an example of a six degree of freedom fine tuning Stewart platform which can be used as a robotic arm of respectable dimensions. It is a mechanical system mounted at six points on a level surface called a base platform. The six linear actuators mounted at the base platform link the moving platform with the fixed base platform via spherical and universal joints at the moving and the fixed base platform respectively. The linear actuators are small servo motor driven actuators which drive them to move along their prismatic joints allowing the legs to extend or retract and thus enable proper trajectory control of the system.
As we consider the Stewart platform arrangement, let us define q and x to be the subscripts [Gosselin and
Angeles (1990)] denoting the set of input and output variables respectively i.e. the variables causing the motion be subscripted by q and the effects be subscripted by x. The relationship between these set of variables have
been expressed in the form of Jacobian transformation matrix relationships represented by J. Thus Jqand Jx
represent the Jacobian matrix corresponding to the input and output variables respectively.
Singularity has been classified by [Gosselin and Angeles (1990)] into three types –
(1) Singularity type I: when Jq is singular.
(2) Singularity type II: when Jx is singular.
(3) Singularity type III:when Jx and Jq are singular i.e. the Jacobian matrix becomes indeterminate.
which is a function of the platform orientation in terms of its translation and rotation about the neutral state. Therefore to determine the singular positions in the system, one of the methods could be to find out the determinant of the corresponding Jacobian matrix and equate it to zero which would give us the required solutions.
Once we obtain the corresponding positions of the system, it will lead to singularity free trajectory within the workspace of the system and will thus guarantee its efficient control.
Here, we define our objective function as the determinant of the Jacobian matrix and the minimal value of the determinant is thus optimized to obtain the existence or absence of singularity in the configuration within the reachable workspace by using the methods of particle swarm optimization and its variants along with genetic algorithm and simulated annealing.
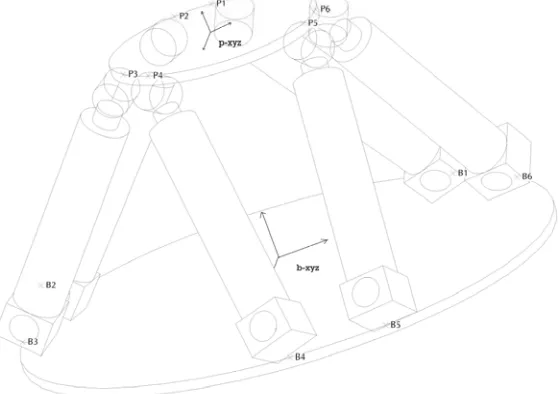
The setup for the system is illustrated as shown in the figure 1.
The inertial frame of reference b-xyz is assumed at the centre of the fixed base platform, while the movable coordinate system is considered at p-xyz which is placed at the centre of the moving platform.
Fig 1.The considered model of Stewart platform
Let the translation of the platform in the x, y and z directions from the neutral position be defined as xp, ypand zp
respectively.
Similarly the rotation of the platform about the x, y and z axis from the neutral position be defined as φ, θ and
respectively which shall further be referred to as the roll, pitch and yaw.
The position of the movable platform can be described in terms of (xp, yp, zp) and (φ, θ, ) in the 3-D space as
the position of the movable platform with respect to the fixed base in the inertial frame b-xyz and the angular rotation to the Z,Y,X axis of the inertial frame of reference p-xyz.
For any of the ith leg actuator, the coordinate of the centre B
i which is connected to the fixed platform in the fixed frame b-xyz is Bi (Xi, Yi, Zi), and the centre which is connected to the moving platform in the moving coordinate frame p-xyz is Pi (xi, yi, zi).
R=
cos cos
sin cos
sin
sin cos
cos sin sin
cos cos – sin sin sin
cos sin
sin sin – cos sin cos
cos sin sin sin cos
cos cos
(1)
Hence the relative coordinates of Pi (xi, yi, zi) with respect to the fixed frame O-XYZ is given by–
T T T
ri ri ri i i i p p p
(X , Y , Z )
R. (x , y , z )
(x , y , z )
(2)Where R is the rotation matrix expressed above.
Thus Xri, Yri, Zri denote the coordinates of Pi (xi, yi, zi) after movement from neutral position.
Now the length of each leg after it has rotated and translated can be expressed as
2 2 2 2
i i ri i ri i ri
L
(X
X )
(Y Y )
(Z
Z )
(3)Now let us consider the Jacobian matrix which is of the prime importance in singularity analysis.
The Jacobian relates the velocities of the six legs in the joint space and the velocity of the moving platform which is a combination of the translational and the rotational components of the platform velocity which is given by (
x
p,y
p,z
p) T (mm/s) and (
,
.
) T(rad/s).Hence q i.e. the input parameters can be defined as
T T
p p p
[ , ]
v w
[ , , , , , ]
x y z
(4)Where
v
andw
represent the translational and rotational components of velocity of platform.And the output parameters or the leg actuations can be described as
p p p
P [x , y , z , , , ]
T 1 2 3 4 5 6[ , , , , , ]
l
l l l l l l
(5)
The Jacobian matrix can be visualized as explained below-
Observing it mathematically [Zhao et al.(2004)] we have,
f (l,q)=0 (6)
l q
J .
l
J .
q
(7)
l q
J
f / l & J
f / q
(8) 1
q l
J . J .
q
l
(9)
Where q and l are the input and output coordinates of the mechanism respectively
Or
J.
Where J is 6 X 6 Jacobian matrix which can be further expressed by the differentiation of the length equation (3) as
p p p
J [ f / x f / y f / z f /
f /
f /
] i 1, 2, 3, 4, 5, 6
(11)Here each term of the corresponding matrix is calculated as stated by [Su et al. (2003)] in their work on the
Stewart Platform for a fine tuning Stewart platform for large radio telescope.
Hence the elements of the matrix can be described as :- (12)
p i1/ i
f / x
A L
p i1/ i
f / y
B L
p i1/ i
f / z
C L
i1 i2 i1 i2 i1 i2 i
f /
(A A
B B
C C ) / L
i1 i3 i1 i3 i1 i3 i
f /
(A A
B B
C C ) / L
i1 i4 i1 i4 i
f /
(B B
C C ) / L
Where Ai1, B i1, C i1, A i2, B i2, C i2, A i3, B i3, C i3, B i4 andC i4 represent the elements calculated which form a part of the Jacobian matrix thus calculated. Here Li represents the length of each of the six legs from i=1,2,3,4,5 and 6.
Once we obtain the Jacobian matrix, it is extremely important to observe that three of our parameters are translational parameters in mm/s while the other three have no dimension which is evident in the above formulation. This results in a unit mismatch and would affect the result drastically. This was first pointed out by Lipkin and Duffy (1988), Doty et al. (1993) and Doty et al. (1995a). This also leads to the conclusion that for a
given position and orientation of the platform, very evidently the determinant of the Jacobian matrix will not be the same under scaling of the dimension of the manipulator.
To overcome this problem in parallel manipulators, Tandirci et al. (1992a) proposed the use of “a characteristic
length” (CL) to normalize all the translational elements in the Jacobian matrix. The CL that minimizes the determinant is termed as the “natural length”(NL) by Ma and Angeles(1991). Angeles (1995b) and Angeles et al. (1992b) have used NL as a design parameter as it plays quite an important role in the final value of the
determinant of the Jacobian matrix.
Hence based on the work which has been stated above we choose the natural length to find out the determinant of the Jacobian matrix. In this case the normal length refers to the average magnitude of vectors Xri, Yri and Zri which are the mean distances between the centroid of the moving platform and the points on the joint locations respectively.
3. Objective Function, Parameters and Constraints
The singularity of a general six DOF Stewart Platform can be judged by finding the minimal of the determinant of the Jacobian matrix. Hence we define the minimal objective function as,
Minimize f (P) = abs (det(J))
Such that P belongs to workspace for the six leg numbers, i = 1, 2, 3, 4, 5, 6;
Where
P [x , y , z , , , ]
p p p
represent the parameters of the function as :- xp – Translation in x-axis.The closer the minimum value of the objective function to zero the more ill conditioned are the configurations and hence the odds of singularity occurrence are higher. A value of the objective function equal to zero would signify presence of singular positions in the Platform’s workspace.
Thus our aim remains to find the lowest possible value of the objective function and thus decide upon the presence of singular positions in the workspace. As long as the value of the function is greater than zero, it would ensure the absence of singularity in the Stewart Platform, hence making it safe for application.
4. Optimization Techniques
In this paper we have applied the biologically inspired techniques of genetic algorithm, particle swarm optimization and variants and simulated annealing to find the optimized output in our Stewart platform setup. In this section we present an overview of these methods and how they can be implemented.
4.1 Real coded genetic algorithm
Genetic algorithms are biologically inspired search algorithms which were first reported by Holland (1992c). This heuristic method helps us reach an exact or approximate optimal value and work on the principle of natural genetics. They are a subset of evolutionary algorithms and are inspired by evolutionary biological phenomenon like inheritance, mutation, selection and crossover. The population is supposed to suffer evolution after each generation and after evolution only the better population is picked. A repetition of such evolutions leads to the clustering of the best population and thus global convergence.
On application to singularity analysis, it is carried out in the following steps-
4.1.1 Coding Scheme
The manner in which data is coded before being operated more or less decides the success of output obtained. The two schemes used for coding are real and binary number system.
In the problem above given the fact that it covers a large workspace of continuous nature, encoding it into binary form and then trying to crossover would not necessarily result into very good variation. Hence the real coding scheme is used in the process. Each configuration consists of six floating point numbers which form one chromosome ready for selection. As a result the solution space coincides with the chromosome space.
4.1.2 Methodology to produce initial population
The initial population can be produced by picking points probabilistically in the solution workspace such that they satisfy the constraints. As a thumb rule, the points hence picked here should be picked as evenly as possible.
4.1.3 Fitness function
Here we use the genetic algorithm as a maximizing function hence we invert our objective function so as to
achieve the desired output. Hence
Maximize f (P) = 1/(abs(det(J)+c)
where
P [x , y , z , , , ]
p p p
which represent platform positions. c=constant so that f (P) ≠∞4.1.4 Genetic operator
This includes the genetic operators of selection, crossover and mutation.
a) Selection-The selection in a genetic algorithm implementation involves the picking of random points from the permissible workspace. It can be carried out in a number of ways taking care that the picking of random points is done in a more or less uniform manner.
b) In this problem, we use roulette selection criteria. Here we first classify the genes into groups on the basis of their fitness values. Then the selection is carried out probabilistically from the roulette board (initial population) and they are considered for further operation.
d) Crossover is generally used so as to create huge jumps in the fitness value; hence in a system with limited workspace points, it would only cause more and more jumping thus resulting in deviation from the average value in the workspace limits and thus resulting in increased computational cost. In the considered example, there does not exist a requirement for large changes hence crossover is not used.
e) Mutation-Mutation is a genetic operator which is used for carrying out small changes in the fitness value of the objective function by tweaking one variable at a time which is chosen randomly. Since the link length constraint checks whether the configuration is within the workspace or not, we only require mutation in the considered example. Hence in the implementation of Genetic algorithm only mutation is used.
4.2 Particle swarm optimization and variants
Particle Swarm optimization is an optimization procedure which is inspired from the biological social behavior of a swarm of birds or a school of fishes and falls under the study of collective intelligence in biological populations. It was first noted and brought into knowledge by Eberhart and Kennedy (1995c and 199d). In such a system each particle is aware of every others particle position and quality of experience just like the social behavior of birds, thus staying informed of the best possible location in the specified workspace.
The best experience of a member can be called as its personal best value, whereas the best experience among all the members is referred to as the global best value. It works on the principle of first locating the particle associated with highest fitness in its own domain and then moving towards the best among the local best fitness particles so as to achieve global convergence.
The particle swarm optimization concept can be explained in the following way. After each small increment in time, the velocity of each particle is changed and decided such that the member moves towards the global as well as the local best set of values. This change in velocity (acceleration) is calculated by randomly picked values, with separate random values being generated for movement toward global and local best locations. Thus after every time step ∆t there is a new swarm of members which has moved towards their personal best values and on the whole towards the global best values, bringing us closer to the location of optimum experience.
If we consider a swarm of size N then the position of the ith particle can be referred to as X
i. The best position discovered by the ith particle shall be referred to as lbest
i and the best position discovered by any of the particles is referred as gbesti. Then the velocity of motion is expressed as-
i 1 i 1 1 i i 2 2 i i
V
w *V {C *R *(lbest
X )} (C *R *(gbest
X )}
(13)Then the new positions can be updated as
i 1 i i 1
X
X
V
(14)Where w is the inertia factor, C1 is the cognitive learning rate and C2 is the social learning rate.R1 and R2 are randomly picked values in the interval {0, 1}.The first part represents the earlier step‘s speed of the swarm. The second part takes care of the local attraction in the swarm. And the third part is responsible for the convergence towards the global best value. These three components of the velocity equation are collectively responsible for the convergence.
4.3 Variant 1: Quantum Particle Swarm Optimization
Results show that the PSO algorithm does not guarantee global convergence hence we propose to implement the Quantum PSO process which is a global convergence guaranteed method which were first proposed and reported by Sunet al. (2004a), Sun et al. (2005) and Sun et al. (2004b).
In the quantum model of PSO, the state of a particle is depicted by wave function ψ(x,t), instead of position and velocity. Here one can relate to the fact by the Heisenberg’s uncertainty principle that it is not possible to depict the exact position and the velocity of a particle simultaneously. Only the probability of a particle occurrence in say a position X can be predicted from the probability function | ψ(x,t)|2.The particle moves according to the following equation :-
t 1 i j t
X
P *(mbest
X )*ln 1/ u if k 0.5
(16)Where
i i i
P
*lbest
1
*gbest
(17)
j i
mbest
1/ N
lbest
(18)Or
mbestj =(1/N){∑ P(i,1)+∑ P(i,2)……+∑ P(i,n)} (19)
Here mbestj can be defined as the mean of all the lbest of the specified population. k, u, ε are all randomly picked values from the interval {0,1}.There is only one tunable parameter in Quantum PSO which is β, called contraction expansion coefficient. It is basically used to control the convergence speed of the algorithm.
In the current problem QPSO is used to obtain results and the obtained results are compared with the Particle Swarm optimization for a single objective function.
4.4 Variant 2: Weighted Quantum Particle Swarm Optimization
In the Quantum PSO algorithm, the mbest term is introduced so as to achieve more efficient convergence. The mbest is nothing but the average of the lbest values of the complete swarm. Hence in this case each fitness value is given equal weightage as it is nothing but the average of the particles. But if we look at it from the social point of view, the elite members i.e. the ones with higher fitness values are the major contributors to the development of the swarm ‘s quality. Therefore if we consider a case in which the better fitness values are given more weightage than the lower fitness values, it should lead to even more efficient convergence. With this fact kept in mind, the mean best position is replaced by a weighted mean best position keeping everything else the same. This modification has been discussed at length by Xi et al. (2008).
The first step in its implementation would be to first determine whether a member is an elitist or not. That can be carried out by evaluating the fitness’s of the members. Hence higher weightage shall be allotted to the member with a higher fitness value and lower to a lower fitness value. This shall take care of the convergence improvement. Hence we first rank the members of the swarm in a descending order and then allot them weightage also in decreasing order. The mean best position can be calculated by the following equation-
i,1 i,1 i,2 i,2 i,n i,nm t
1/ N { *P
*P
*P }
(20)Where α i is the weight coefficient of the particle.
Here the value of the weight coefficient is continuously decreased from 1.5 to 0.5.
Here an effort is made to keep the value of β as low as possible so that convergence speed is achieved and better results are obtained.
For the implementation of the PSO, its variants and simulated annealing procedure we formulate the objective function as a minimization problem as shown below-
Minimize f (P) = abs (det(J))
Where
P [x , y , z , , , ]
p p p
which represent platform positions.4.5 Simulated Annealing
While all the methods used above are population based search algorithms, simulated annealing does not search for a set of random points in the workspace.
Simulated annealing [Baykasolu et al. (2004c)] is a probabilistic method specifically meant for global
This technique gets its origin from the annealing phenomenon which occurs in metallurgy. The trick lies in involving heat and controlled cooling of a material so as to achieve the desired properties which are the increase of the size of crystals and reduction of defects. As the global best is searched for, the temperature is continuously decreased so that the probability of best detection increases. At the same time the considered entity moves from higher temperature to lower temperature zone thus continuously moving towards a lower energy state leading us to an approximate answer in very less computational cost.
5. Results and Discussions
The above stated algorithms namely genetic algorithm, particle swarm optimization and variants and simulated annealing were hence applied to the system under consideration as stated below and the results have been presented in the current section.
The values of each control parameter of the objective function i.e. the translations in the three axes and the rotation about three axes are bounded in a manner such that the leg lengths of each of the arms are within their maximum and minimum extension limits in terms of lengths.
In order to determine the workspace which can be covered by the manipulator we can use the boundary limits for our designed system. By implementing the boundary conditions we figure out the maximum and minimum lengths of each of the legs which are our constraint.
In this example, a total travel of about 15 mm has been allowed for each leg keeping the platform at neutral state and the workspace thus automatically gets restricted as specified by Merlet (1987) in his earlier work.
Here we present an example of a Stewart platform setup which can be used as a robotic arm, and can have application in the precise surgical operations in the medical world. The dimensions are in the small range and the purpose is to make an arrangement which can hold the cutting tool firmly and create small but precise and accurate motions.
All the numerical simulation was carried out on an Intel ® Core™ 2 Duo CPU [email protected] processor with 4.00 GB RAM personal computer using the MATLAB software.
The architectural specifications of the Stewart platform setup under consideration are –
Fixed platform (Base) Radius =60 mm Moving Platform Radius = 40 mm
Angle between joint locations on moving platform = 10 degrees Angle between joint locations on base platform= 10 degrees Height (initial normal distance between two platforms) =50 mm
The above stated methods for finding the optimal value were thus implemented and the results have been documented as shown below. We shall look into these methods one after the other.
5.1 Genetic algorithm
The genetic algorithm is implemented with the following parameters:-
Relative parameters Value
Mutation factor (in %) 100%
Length of chromosome 6
Size of population 81
Maximum generations 50
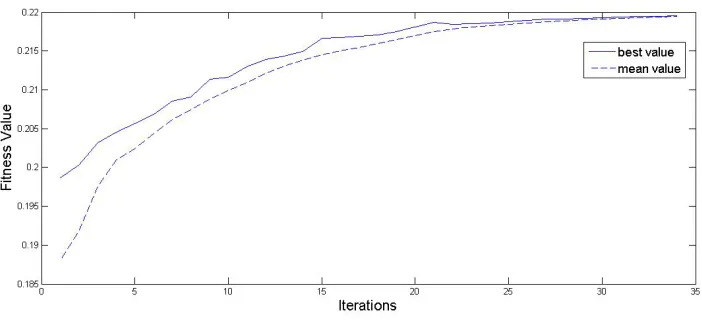
Fig 2.Genetic algorithm convergence
The mutation is carried out so as to obtain a minimum value of the Jacobian. The genetic algorithm problem formulation was done in the form of maximization of the inverse of the Jacobian. Hence on implementation of this maximization problem through genetic algorithm as per the above specified parameters, we obtain a minimum value of the Jacobian which can be converged in only some 35 iterations as obtained in Figure 2 convergence plot. Even though we observe that the number of iterations is less it takes a long computation time of 57 minutes. We observe that the best value is the inverse of the determinant of the Jacobian value and we obtain a best value of 4.4823 which is the lowest determinant value of the Jacobian with a standard deviation of 0.0035. It is well established that in genetic algorithms we need to experiment different options to obtain the best results. Following the same understanding, since the final result depends on the initial values assumed by the parameters, we obtain a standard deviation in the final fitness values of the population. The genetic algorithm thus offers us a fairly satisfactory result with a long computation time. We shall further draw in these results on comparison to the other methods in consideration.
5.2 Particle Swarm Optimization
The first stage analysis carried out by obtaining the minimal value of the determinant of the Jacobian by the implementation of the genetic algorithm led us to a minimum value of the Jacobian. Now we shall implement the same problem using the particle swarm optimization technique in this section.
In the implementation of the PSO technique as a minimization problem, an inertia factor of 0.8 was used which was slightly decreased with advancing generations. The value of inertia factor is reduced by a small value (1E-04) in each iteration. The local and global acceleration constants are set as c1=0.9 and c2=0.9 respectively. The termination criterion was defined as the occurrence of 2500 generations. This was kept high so as to allow the algorithm to search for a better result if there is any scope for improvement.
On obtaining the results we found that, unlike the genetic algorithm the results were found to be independent of the initial guesses as is evident from the standard deviation value of zero. The zero standard deviation thus defines a single outcome of the search algorithm ruling out any inconsistency in results. Also the PSO technique provides us a better optimal value convergence than the genetic algorithm in about just 60 iterations with smaller changes in further iterations concluding at about 80 iterations. Also when we look at the computation cost involved in this problem it takes a mere 4.617 minutes to reach an optimum minimum value of 4.4556. All the members of the population were found to be the same up to at least the fourth decimal point (1E-04).
When the optimization is carried out using the particle swarm optimization process we obtain improved results as compared to the genetic algorithm with a considerable decrease in the computation cost. Hence we conclude that with the PSO algorithm not only gives us a slight edge on the accuracy of the result it also reduces the computational cost incurred drastically. As is visible from the study, not only is PSO quicker but is also sharper in its results. A standard deviation of zero shows that the result remains the same regardless of the initial guesses.
to each other as far as their parametric values are concerned. Such positions are widely spread everywhere across the workspace. Unlike the case with the genetic algorithm, the PSO with no standard deviation yields only one fitness value. This tells us that there can be only one position which corresponds to the position of the Stewart Platform closest to singularity in space.This thus proves to be a significant improvement achieved through PSO over the genetic algorithm.
Due to the stochastic nature of these algorithms, the results obtained on their application will not be exactly same. Hence for their overall comparison the total computation time, the best and the worst fitness and the standard deviation have been calculated. The results thus obtained have been tabulated in the table 1 which is presented at the end of this section.
5.3 Quantum Particle Swarm Optimization
In the Quantum PSO variant we have chosen an inertia factor of 0.001. This is to ensure the slow convergence speed for obtaining higher final accuracy.C1 or the cognitive learning rate is chosen as 0.5 and C2 or the social learning rate is also chosen as 0.5. The inertia factor is kept constant
As compared to the PSO and Genetic algorithms, on implementation of the minimization problem, we obtain better results when we adopt the Quantum PSO algorithm but with a small trade off on the computational cost of the procedure i.e. while PSO offers us quicker results Quantum PSO offers us more accurate results. We obtain a minimum value of 4.3902 which is further more accurate than PSO but taking a computation time of 9.75 minutes approximately. Thus the slow convergence speed here corresponds to better global search ability, while fast speed results in good local search ability.
Hence we can say that the results obtained Quantum PSO are of greater accuracy because it is observed that we obtain a lower value of the Jacobian compared to that obtained by PSO. It is evident that while fast speed employed in PSO algorithm given us the result in less computational cost, slow convergence speed employed in the case of Quantum PSO shows its better global search ability. This leads us to conclude that Quantum PSO provides us with optimal results as far as the current work is concerned.
5.4Weighted Quantum Particle Swarm optimisation
For the variant Weighted Quantum Particle Swarm optimization constants C1 and C2 are given a value of 0.5 each. The inertia factor is given a value of 0.001 and is kept constant throughout the algorithm implementation. While we see from the above results that Quantum PSO offers us better results than PSO, all the members of the swarm are given equal importance. In the Weighted Quantum PSO procedure, the elite members are given more weightage compared to the ordinary members of the swarm. We observe that once again while QPSO gives us quicker and accurate results, Weighted QPSO promises us even more accurate results, but with a slightly higher computational cost.
It can be observed that the values of these parameters are almost converged at 1730 iterations and take a computational time of 35.8 minutes. Hence it can be said that while the algorithms are quite efficient in their operation as they offer slightly better results with trade off on computational costs.
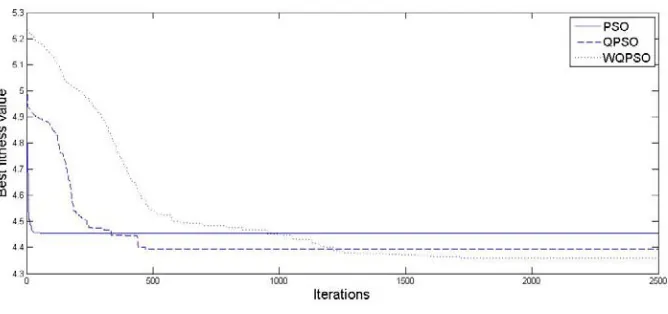
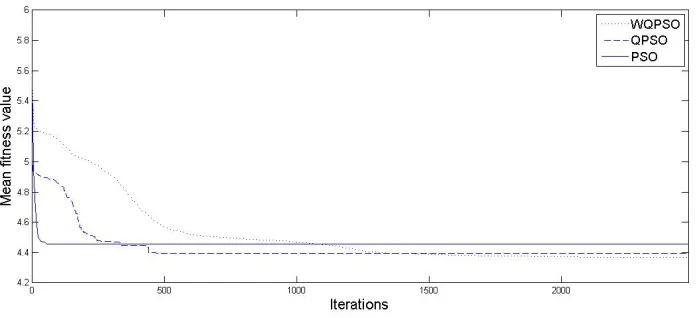
In Fig .3 and Fig.4, we present the best value convergence pattern and the mean value convergence pattern of the three methods (PSO, QPSO and WQPSO) respectively.
Fig 4.Mean value convergence pattern (PSO and variants)
As is evident from Fig.3 and 4, the results obtained by WQPSO are comparable to those by QPSO and PSO respectively. By about 2500 iterations, all the three algorithms tend to demonstrate stable fitness values. In the best value comparison it can be easily observed that PSO yields a fairly quick result with quicker convergence to the best value as compared to its counterparts. A similar trend is observed even in the mean fitness value convergence graphs. For the positional configurations in this case, i.e. Stewart platform configurations, the results are at equality with each other for the three algorithms except for minor change in values. Even in earlier research, QPSO exhibits better global optimal convergence than PSO [Bergh (2001); Sun et al. (2004); Sun et al. (2004); Sun et al. (2005); Xi et al. (2008)]. The same pattern is exemplified in the current study and further
from these findings it can be inferred that probable global optimal positions have been reached by the above employed methods. The values as depicted in Table 1 clearly indicate the best value obtained from WQPSO as 4.3540 over that obtained from QPSO as 4.3902 and PSO as 4.456. Thus the results from WQPSO which when compared with that obtained using PSO shows an improvement of 3% with an exceptionally high computation time trade-off. Figs 3 and 4depict that trade-off between the personal best and mean best of swarm particles of WQPSO, QPSO and PSO. It is seen that though PSO shows faster convergence, better results are found with WQPSO. The slow convergence speed corresponds to good global search ability, while fast speed results in good local search ability. This clearly shows that WQPSO is successful in having better global search capability in comparison to QPSO and PSO and hence a better optimal result is obtained using QPSO in the present work. But it cannot be forgotten that the optimized results obtained using the WQPSO offer a fairly small value of improvement in the current problem with a fairly large computational cost which is almost 8 times that used by PSO and hence for such problems, it is not advisable to use the WQPSO when PSO offers us a fairly optimal result.
Fig 5.Position and Orientation variation
5.5 Simulated annealing algorithm
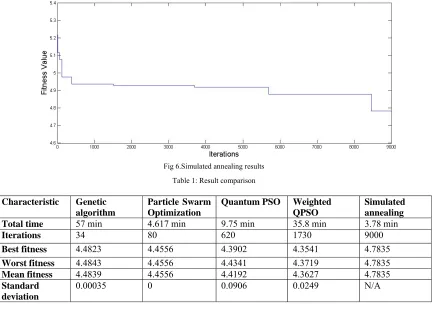
In Fig.6, we present the convergence pattern by the implementation of the simulated annealing algorithm. It being a non populative method; only a single member of the population is considered at a time. This procedure is known for providing us with approximate results in a very short time and very low computational cost. Here we obtain a quick minimum value of 4.7835 in some 9000 iterations and a computation time of 3.78 min. Its results are also tabulated and compared in table 1.
The simulated annealing in this case provides us with an approximate value of the Jacobian with a very low computational cost. This method is an example of organized random picking methods. It only gives us a rough estimate and can be observed to be not as precise and specific as the particle swarm optimization or the genetic algorithm. But as in the case of genetic algorithm, the final result depends on the initial guesses. Also in this case, since the PSO algorithm costs us about 1.2 times as much computation time, PSO would definitely be the preferred choice as it does not compromise heavily on the computational cost and at the same time serving our purpose satisfactorily.
Fig 6.Simulated annealing results
Table 1: Result comparison
Characteristic Genetic algorithm
Particle Swarm Optimization
Quantum PSO Weighted QPSO
Simulated annealing Total time 57 min 4.617 min 9.75 min 35.8 min 3.78 min
Iterations 34 80 620 1730 9000
Best fitness 4.4823 4.4556 4.3902 4.3541 4.7835
Worst fitness 4.4843 4.4556 4.4341 4.3719 4.7835
Mean fitness 4.4839 4.4556 4.4192 4.3627 4.7835
Standard deviation
6. Conclusion
In this paper, we present a model for singularity analysis of the Stewart Platform structure meant for precision surgery and a comparative study of the results obtained by genetic algorithm, PSO and variants and simulated annealing algorithms. On implementation we find the considered example to be singularity-free. The singularity minimization and optimization problem has been formulated as a single-objective optimization problem with the sole objective of minimizing the determinant of the Jacobian obtained which is a function of the position and the orientation of the platform thus checking for singular positions in the system. The position in terms of X, Y and Z axes and the orientation in terms of roll, pitch and yaw of the mobile platform are the control variables in the current work. Thus the above prescribed method can be used to check the existence of singularity in the system at the design stage.
In the current study the workspace consists of all the positions which the mobile platform can reach keeping only the leg constraints in consideration. The comparison is drawn upon the genetic algorithm, QPSO, weighted QPSO and the PSO algorithm. While the genetic algorithm gives us more or less accurate results in comparatively huge computational time, the PSO is considered supreme in accuracy and at the same time requiring less computational cost thus proving supremely efficient. We also conclude that WQPSO showed better global search capability which satisfies the claim that WQPSO gives better global optimization than PSO and QPSO. It is also noted that slower convergence to optimal positions were obtained by QPSO and even slower for WQPSO than the PSO algorithm. It is inferred that this slow convergence of WQPSO and QPSO aids it to have better global search capability.
This approach can also be considered unique and versatile in the sense that it does not impose any limitation on the number of constraints and it can be easily implemented without
making major modifications to the basic formulation, making the WQPSO and QPSO based optimization model robust, adaptable and efficient. But given to consider a slight compromise on accuracy, the PSO technique can preferably declared to be the best among these algorithms with a low computational cost.
Nomenclature
DOF Degree of Freedom UPS Prismatic Joint Actuators SPS Spherical Joint Actuators CNC Computer Numeric Control J Jacobian Matrix
Jx Jacobian of Input Variables Jy Jacobian of Output Variables b-xyz Inertial frame of reference p-xyz current frame of reference
xp Translation of platform about x-axis
yp Translation of platform about y-axis
zp Translation of platform about z-axis
φ Rotation of platform about x-axis θ Rotation of platform about y-axis Rotation of platform about z-axis CL Characteristic Length NL Natural Length
i 1
V
Velocity of (j+1)th particleXi x-coordinate of base platform Yi y-coordinate of base platform Zi z-coordinate of base platform xi x-coordinate of base platform yi y-coordinate of base platform zi z-coordinate of base platform R Rotation Matrix O-xyz Fixed frame of reference Xri x Coordinate after rotation Yri y Coordinate after rotation Zri z Coordinate after rotation Li Length of each leg q Input Coordinates
v
Translational Velocity of platformw
Rotational Velocity of Platform P Output Set of variables C1 Cognitive Learning Rate C2 Social learning RateR1,R2 Random value between 0 and 1 lbesti Local Best Value
∆t Time Step gbesti Global Best Value GA Genetic Algorithm PSO Particle Swarm Optimization
QPSO Quantum Particle Swarm Optmization
WQPSO Weighted Quantum Particle Swarm Optimization β Contraction Expansion Coefficient
α i Weight Coefficient Factor SA Simulated Annealing
References
[1] Abicht, C., Ulbrich, H. and Riebe, S (2002), Active vibration isolation of a Stewart-platform using high response hydraulic actuators, Proceedings International Conference Motion Vibration Control 2002.Vol.6, No.Vol.1,pp. 30-35.
[2] Angeles, J.(1995b) Kinematic isotropy in humans and machines, In Ninth World Congress on the Theory of Machines and Mechanisms, Volume 1, Milan, Aug 29- Sept 2, 1995b,pp. 42 –49.
[3] Angeles, J., Ranjbaran, F. and Patel, R.V.(1992b), On the design of the kinematic structure of seven axis redundant manipulators for maximum conditioning, Proceedings IEEE International Conference Robotics and Automation, Nice, France, May 10-15, 1992b,pp. 494-499.
[4] Baykasolu, A., Nabil, N. and Gindy, Z.(2004c), A simulated annealing algorithm for dynamic layout problem , Computers & Operations Research, Volume 31, Issue 2, February 2004c,pp. 313-315.
[5] Bergh, F. V. D.(2001), An analysis of particle swarm optimizers, Ph.D. Thesis, Department of Computer Science, University of Pretoria, Pretoria, South Africa, 2001.
[6] Bessala, J., Bidaud, P., Ben Ouezdou, F. and LRP, Velizy (1996), Analytical study of Stewart platform workspaces, Proceedings IEEE International Conference on Robotics and Automation, 1996, Minneapolis, USA, 22-28 Apr 1996,Volume 4, pp. 3179-3184. [7] Cleary, K. and Arai, T. (1991), A prototype parallel manipulator: kinematics, construction, software, workspace results, and singularity
analysis, IEEE International conference on Robotics and automation, Sacramento, California, April 1991,pp. 566-571. [8] Degani, A., and Wolf, A. (2006), Graphical singularity analysis of planar parallel manipulators, Proceedings of the 2006 IEEE
International Conference on Robotics and automation, Orlando, Florida, May 2006.
[9] Dongsu, W. and Hongbin, G. (2007), Adaptive Sliding Control of Six-DOF Flight Simulator Motion Platform, Chinese Journal of Aeronautics ,Volume 20, Issue 5 October 2007,pp. 425-433.
[10] Doty, K.L., Melchiorri, C. and Bonevento, C.(1993), A theory of generalized inverse applied to robotics, International Journal of Robotics Research, 1993, 12(1),pp. 1–19.
[11] Doty, K.L., Melchiorri, C. and Schwartz, E.M.(1995a), Robot manipulability, IEEE Transactions on Robotics Automation 1995, 1995a, 11(3),pp. 462–468.
[12] Eberhart, R. C., & Kennedy, J. A.(1995c), New optimizer using particles swarm Theory, In Sixth international symposium on micro machine and human science, Nagoya, Japan, 1995c,pp. 39–43.
[13] Eberhart, R. C., and Kennedy, J. A.(1995d), Particle swarm optimization, Proceedings Of the IEEE international conference on neural networks, Perth, Australia, 1995d,pp. 1942–1948.
[14] Gosselin, C. and Angeles, J. (1990), Singularity Analysis of closed loop Kinematic Chains, IEEE Transactions Robotics in Automation, Vol.6 No.3, 1990, pp. 281-290.
[15] Gough, V. E. (1956), Contribution to discussion of papers on research in Automobile Stability, Control and Tyre performance, Proceedings Auto Division. Institution of Mechanical Engineers, 1956,pp. 392-394.
[16] Holland, J.H.(1992c), Adaptation in nature and artificial systems Cambridge, MA: MIT Press, 1992c.
[17] Kim, N. and Lee, C.W. (1998), High Speed Tracking Control of Stewart Platform Manipulator via Enhanced Sliding Mode Control, Proceeding of the 1998 IEEE International Conference on Robotics &Automation, Leuven, Belgium, May 1998,pp. 2716-2721. [18] Hybrid twist and wrench control for a robotic manipulator, Journal of Mechanical Trans Automation Design, 1988, 110(6),pp. 138–
144.
[19] Ma, O. and Angeles, J.(1991), Optimum architecture design of platform manipulators, Proceedings. IEEE International conference on Advanced Robotics, Pisa, Italy, 1991,pp. 1130-1135.
[20] Merlet, J.P.(1987), Parallel manipulator: kinematics, singular configurations and compliance, Proceedings 3rd International Conference on Advanced Robotics, Versailes, France, 13-15 October 1987,pp. 126–135.
[21] Patel, A. and Ehmann, K.F. (1997), Volumetric Error Analysis of a Stewart Platform Based Machine Tool, Annals of CIRP, Vol.46/1, 1997, pp. 287-290.
[22] Pendar, H., Roozbehani, P., Sadeghian, H. and Zohoor, H. (2008), Singularity Analysis of a 3DOF Parallel Manipulator Using Infinite Constraint Plane Method, Journal of Intelligent and robotic systems, Volume 53, Number 1, September, 2008, Springer Netherlands. [23] Simaan, N. and Shoham, M. (2003b), Geometric Interpretation of the Derivatives of parallel Robots, Jacobian Matrix with application
to Stiffness control, Journal of Mechanical Design, ASME, 2003b, volume 125,pp. 33-42.
[24] Stewart, D.A. (1965), Platform with six degrees of freedom, Proceedings Institution of Mechanical Engineers, Vol.180, Part I, No.15, 1965,pp. 371-386.
[26] Sun, J., Xu, W. B., and Feng, B.(2004a), A global search strategy of quantum-behaved particle swarm optimization, Proceedings of the 2004 IEEE Conference on Cybernetics and Intelligent Systems, 2004a ,pp. 111–116.
[27] Sun, J., Feng, B. and Xu, W. B.(2005), Adaptive parameter control for quantum behaved Particle swarm optimization on individual level, In Proceedings of the 2005 IEEE international conference on systems, man and cybernetics, Piscataway, NJ, 2005,pp. 3049– 3054.
[28] Sun, J., Feng, B. and Xu, W. B.(2004b), Particle swarm optimization with particles having quantum behavior, IEEE Proceedings of Congress on Evolutionary Computation,Portland OR,USA,June 19-23,2004b,pp. 325–331.
[29] Tandirci, M.,Angeles,J. and Ranjbaran, J. (1992a) , The characteristic point and the characteristic length of robotic manipulators, Proceedings ASME 22nd Biennial conference on Robotics, Spatial Mechanics. Mechanical systems, Vol.45, Scottsdale, AZ, Sept 13-16,1992a, pp. 203-208.
[30] Wapler, M., Urban, V., Weisener, T., Stallkamp, J.,Durr, M. and Hiller, A. (2003a), A Stewart platform for precision surgery, Transactions of the Institute of Measurement and Control,2003a, Vol. 25, No. 4,pp. 329-334.
[31] Xi, M., Sun, J. and Xu, W.(2008), An improved quantum-behaved particle swarm optimization algorithm with weighted mean best position, Applied Mathematics and Computation, 2008,pp. 751–759.
[32] Zhao, J., Li, B., Yang, X. and Yu, H. (2009), Geometrical method to determine the reciprocal screws and applications to parallel manipulators. Robotica Cambridge University Press, 2009.