MURDOCH RESEARCH REPOSITORY
http://dx.doi.org/10.1109/ICNN.1995.487819
Li, W. and Attikiouzel, Y. (1995) Unsupervised segmentation of
multi-echo MR images with an ART-based neural network. In:
Proceedings of the IEEE International Conference on Neural
Networks, 27 November - 1 December, Perth,
Western Australia pp. 2600 - 2604 vol.5.
http://researchrepository.murdoch.edu.au/20631/
Copyright © 1995 IEEE
Personal use of this material is permitted. However, permission to reprint/republish
this material for advertising or promotional purposes or for creating new collective
Unsupervised Segmentation of Multi-echo
MR
Images
With an
ART-Based
Neural Network
Wanqing Li
Yianni
Attikiouzel
Centre for Intelligent Information Processing Systems The University of Westem Australia, WA 6009, Australia
[email protected], [email protected]
ABSTRACT
This paper investigates the suitability of an ART-based neural network for unsupervised segmentation of multi-echo MR images. T h e ART2A network was used to segment standard dual-echo
MR
images. Two problems were identified with the basic ART2A: one, the network was hardly convergent; and two, the categorization depended on the order of presentationof the patterns. In order to solve these two problems, a dynamic learning parameter and
a random pattern presentation method were introduced. Results using a number of actual dual-echo MR images with the modified ART2A network show that ART-based networks can be used for segmentation of multi-echo MR images.
1.
Introduction
Multi-echo or multispectral MR images are com- monly used in routine diagnosis as they provide more distinguishable patterns for a variety of tissues and contain more pathological information than single echo MR images. The standard MR images depict dual-echoes: the proton density weighted
(PDW) and the spin-spin relaxation time weighted (T2W). Since all echo images are registered spa- tially over the object space, the information ex- tracted by means of image processing from these multi-echo images is obviously more valuable and reliable than information extracted from singleecho image and then simply adding it together.
The purpose of segmenting human head MR images is t o quantify the brain tissues. This can provide radiologists with pathological information, and the ability t o visualize the shape of tissues and their spatial relationships. It also provides surgeons and radiation therapists with a method for simu- lating or applying treatment. Currently, most of the proposed segmentation methods [l, 15, 16, 101
are based on multi-dimensional d a t a analysis tech- niques; some of them are supervised and others are unsupervised.
Supervised segmentation [l, 15, 16, 101 methods require intensive user interaction t o collect training samples for each tissue and t o correct the segmen- tation results. In contrast, unsupervised segmenta- tion
[I,
15, 10, 13, 12, 9, 11, 171 provides an auto- matic approach for extracting tissues from imageswithout any prior information and thus increasing productivity.
Adaptive Resonance Theory (ART) [3] was in- troduced by Carpenter and Grossgerg as a theory of human cognitive information processing. This theory led t o a family of real-time neural networks [3, 2, 6, 8, 7, 4, 51 for unsupervised learning and pattern recognition. Among them, ART2 [2] and ART2A [6] can stably learn t o categorize either analog or binary input patterns presented in an arbitrary order (ART2A is an asymptotic case of ART2).
This paper provided a study of the suitability of an ART-based neural network to automatically seg- ment multi-echo MR images. An ART2A network was used t o segment standard dual-echo MR im- ages. Two problems were identified with the basic ART2A proposed by Carpenter and Grossberg [6]. One was that the network was hardly convergent; and the other was that the categorization depended on the presentation order of the patterns. In order to solve these problems, a dynamic learning pa- rameter and a random pattern presentation method were introduced.
Section 2 overviews the proposed method, in- cluding the learning and execution cycles of an ART2A network and the organization of patterns. Section 3 discusses the problems encountered with a
dual,-echo
MR
images with the proposed improved ART2A network together with the conclusions.2.
Method
2.1. ART2A neural network
The principal components of ART neural networks [3] a.re an attentional subsystem, which contains an input field F1, a category representation field F2, and an orienting subsystem, which interacts with the izttentional subsystem t o carry out an internally controlled search process. The two fields are linked by both a bottom-up,
+
F z , adaptive filter and a top-down, F2+
F l , adaptive filter. A path from the i'th Fl node t o j ' t h F2 node contains a Long Term Memory (LTM) trace or weight, zij, a path from the j ' t h FI node t o thei'th
F2 node contains aLTM weight zji. The states of F1 and F2 are known as Short Term Memory (STM).
[n ART2 or ART2A model, another preprocess- ing field FO is added to carry out contrast enhance- ment, noise deduction and normalization of input signals before the input goes into field F1. From software simulation point of view, the major pa- rameters characterizing an ART2A network are d ,
a threshold for signal enhancement on Fo; p , a vig- ilance parameter, 0
5
p5
1; and @, a learning parameter. Its major operations are(1) enhancement and normalization on FO of an input pattern Io
where q is a normalizing operation} q x E
&
andxi if xi
>
d 0 otherwise (F0x)z=
(2) choice of winning node
J
on F 2 when TJ=
ma.xj(Tj) and TJ2
p;(3) updating or learning of bottom-up LTM z;
I
if J is an uncommitted node
if J is a committed node
denotes the value of z; at the start of (2)
* ( o l d )
wh,ere z J
the input presentation.
* ( o l d )
Ii
if zJi>
t30 otherwise
*<
=2.2. MRI Data
Multi-echo MR images are normally scanned at,
different echo times (TEs) with a tailored pulse sequence of a certain repetition time (TR). Each echo image represents the magnetic property of a,
thin slice, say 5mm, of human body at a same position along horizontal (coaxial) or saggital or
verticofrontal direction A volume element, called voxel, in the thin slice corresponds t o a pixel in each echo image and its magnetic property appears as the densities of the pixels in all echoes.
As all echo images are spatially registered, if
a voxel is considered as a pattern in a multi- dimensional framework the p echoes of MRI, each of which is of size M x N , can be represented as
M x N patterns, X = ( x ~ , x ~ , ~ ~ - , x ~ ~ N ) . Each
pattern is characterized as a feature vector in W ,
xi = ( x i l , x i z , . . .
,
x i p ) , where xij represents the density of i'th pixel in j'th echo image.Our data set consists of 20 slices of actual standard dual-echo head MR images with T R == 1800ms. One echo is PDW scanned at T E = 20ms; the other is T2W scanned at T E = 80ms. The size of each slice is 256 x 256. The resolution is l m m in intraslices and 5mm in interslices.
2.3. Pattern transformation
When a pattern is presented to an ART2A network, its magnitude information is lost after normaliza- tion by Fo. However, this information is crucial for
characterization of tissue types in MRI. Hence, the pattern should be transformed so as t o keep the magnitude information before it is used as an input to the network. Here, we use z-axis normalization
~ 4 1 .
Given a pdimensional pattern vector x := (z1
,
22, * *. ,
xp),
where xi is the density of the i'th echo of MRI, the transformation consists of two steps. The first step is to scale each component zi of the pattern vector x in the range [ a l l ] by dividingxi by the maximum density of the i'th echo,
Di.
Then
The second step is to apply z-Axis normalization t o the vector x'. Here, an extra dimension is created to encode the magnitude information of XI.
I P
p
-
xi2li
i=lX p + l =
2.4. Segmentation procedures
For N pattern vectors from p echoes:
Step 1 Initialize the network parameters 6,
p,
p , and the maximum number of iterations, IT. Step 2 Select one pattern x from the N patterns. Step 3 Transform x t o x using Eqs.(3)-(7). Step 4 Input x t o the network. The network en-ters its competing and learning cycle as de- scribed in Section 2.1
for intermediate-learning when ,8 was small, for ex- ample 0.01, the initial number of categories learned by the network did not depend on the vigilance parameter p though it should have, as p is one of the most important properties of ART networks. As the network learned gradually from the input patterns iteratively, the number of categories would (7)
Step 5 If all N patterns have been learned by the network, go t o next Step 6; Otherwise, go t o Step 2.
Step 6 If the categorization by the network is sta- ble or the number of iteration is greater than I T , go t o Step 7; Otherwise, increase the number of iteration and go t o Step 2. Step 7 Classify all N patterns with the learned
network and form a coarse segmentation of the MR images.
Step 8 Refine the coarse segmentation.
The values of ,fl and p control the network learn- ing speed and degree of categorization as discussed in [6]. In contrast t o [6], we constrain the value of 6 in the range of (0, &], where Db is the average density of background and D is maximum density of foreground.
In Step 7, a stable categorization learned by the network means that the categories of all patterns keep identical between two successive iterations.
-
be expected t o depend on the vigilance parameter
p . This learning process resulted in a waste of nodes
on F2. A number of nodes on F 2 were only of tem- porary use and could not be accessed any more at the latter stage of learning. Therefore, the number of nodes on F 2 had t o be very large even though the final categories were small.
The second problem, which was intrinsic t o all ART networks, was that the final categories of pat- terns depended on the order in which the pattern were presented to the network.
3.2. Improvements
For the first problem, a dynamically decreased learning parameter was introduced into the learn- ing procedures; and for the second problem, this could be solved by the use of random selection of input patterns. With these two new approaches, the related steps were modified as follows:
Step 2 Randomly select one pattern from the N
patterns.
Step 6 If the categorization by the network is sta- ble or the number of iteration is greater than
I T , go to Step 7; Otherwise, increase the number of iteration and go to Step 6a. Step 6a Modify the learning parameter
t
IT (8)
Step 8 refines the coarse segmentation so as to p e w ) = (1 - -) x
p W )
correct some misclassification of pixels by Step 7since only density information is used so far. Nor- mally it is a procedure to check the spatial depen- dency of a pixel on its neighbours.
where, t is the current iteration, pinit is the initial value of
p.
4.
Results and Conclusion
3. Problems and Improvements
3.1. Problems
Implementing the segmentation method by soft- ware simulation and applying it to a pair of our dual-echo MR images, it was observed that the re- sults were not as expected. Tracing through the learning process of the network, two problems were identified.
The first one was related to the choice of learn- ing parameter
p.
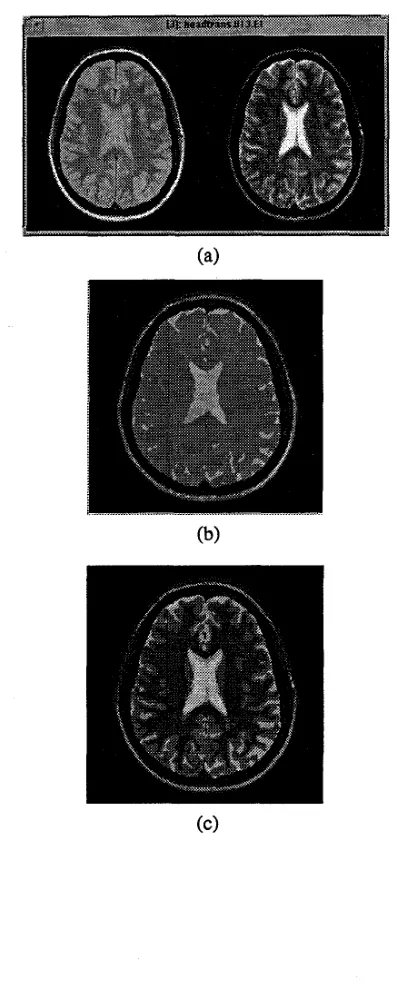
For fast-learning, when ,8 was large, for example 0.85, the network was unstable;A number of dual-echo MR images chosen from our data set were used for Segmentation. The results were satisfactory, one is presented in Figure 1. The network parameters used were 6 = 0.05,
p
= 0.8, 0=
0.80,0.85 for (b) and ( c ) respectively.tissue, as shown in Figure l(b); when p = 0.85, these two matters were well separated, as shown in Figure l ( c ) . Finally, the improved network was stable. It can be expected that for our 256 x 256 pat- terns, the network can reach its stable status within several hundred iterations in comparison with over
2000 iterations of the original ART2A network for
only 46 patterns [6].
ACKNOWLEDGMENT
Wainqing Li is supported by the Overseas Postgrad- uate Research Scholarship (OPRS) of Australia and the University Research Studentship
(URS)
of The University of Western AustraliaReferences
J.C. Bezdek, L.O. Hall, and L.P. Clarke. Re- view of MR image segmentation techniques using pattern recognition. A m . Assoc. Phys. Med.
,
20(4): 1033-48, Jul/Aug 1993.Gail A. Carpenter and Stephen Grossberg. Art 2: Self-organization of stable category recogni- tion codes for analog input patterns. Applied
Optics, 26(23):4919-30, December 1987. Gail A. Carpenter and Stephen Grossberg. A massively parallel architecture for a self- organizing neural pattern recognition machine.
Computer Vision, Graphics and Image Pro-
cessing, 37(1):54-115, 1987.
Gail A. Carpenter, Stephen Grossberg, and John H. Reynolds. Artmap: Supervised real- time learning and classification of nonstation- ary data by a self-organizng neural network.
Neural Networks, 4:565-588, 1991.
Gail A. Carpenter, Stephen Gross- berg, John H. Reynolds, and David B . Rosen. Fuzzy artmap: A neural network architecture for incremental supervised learning of analog multidimensional maps. IEEE Transactions on Neural Networks, 3(5):698-712, September 1992.
Gail A. Carpenter, Stephen Grossberg, and David B. Rosen. Art 2-a: An adaptive r e s onance algorithm for rapid category learning and recognition. Neural Networks, 4:493-504, 1991.
Gail A. Carpenter, Stephen Grossberg, and David B. Rosen. Fuzzy art: Fast stable learn- ing and categorization of analog patterns by an adaptive resonance system. Neural Networks,
Gail A. Crapenter and Stephen Grossberg. Art 3: Hierarchical search using chemical trans- mitters in self-organizing pattern recognition architectures. Neural Networks, 3 (2) : 129-152, 1990.
4:759-771, 1991. Fig. 1: Segmentation of the improved ARTZA network with an actual dual-echo B = 0.05,p MR images with = 0.80. (a)
original images; (b) segmentation into 4 tissues at p = 0.810;
[9] Richard 0. Duda and Peter E. Hart. Pattern Classificatzon and Scene Analysis. John Wiley and Sons, New York, 1973.
[lo] Lawrence 0. Hall, Amine M . Bensaid, and Laurence P. Clarke. A comparison of neu- ral network and fuzzy clustering techniques in segmenting magnetic resonance images of the brain. IEEE Trans. Neural Networks, 3( 5):672-82, Sept 1992.
[11] Teuvo Kohonen. Self-Organization and Asso- caative Memory. Springer-Verlag, Berlin Hei- delberg, second edition, 1988.
[12] Zhengrong Liang, James R. MacFall, and Don- ald P. Harrington. Parameter estimation and tissue segmentation from multispectral mr im- ages. lEEE Trans Medical Imaging, 13(3):441- 449, Sept 1994.
[13] Z Linag, R.J. Jaszczak, and R.E. Coleman. Parameter estimation of finite mixture using the em algorithm and information criteria with application to medical image processing. IEEE Trans Nuclear Science, 39(4):1126-33, 1992.
Practical Neural Network Recipes in C Plus Plus. Academic Press, Inc., 1993.
[15] M Morrison and Y Attikiouzel. An introduc- tion t o the segmentation of megnetic resonance medical images. The Austmlian Computer Journal, 26(3):90-98, Aug 1994.
[ l G ] Mehmed Ozkan, Benoid M. Dawant, and Robert J. Maciunas. Neural-netwrok-based segmentation of multi-modal medical images: A comparative and prospective study. IEEE
Trans. Medical Imaging, 12(3):534-44, Sept 1993.
[17] Nikhil R Pal, James C Bezdek, and Eric C.-K.
Tsao. Generalized clustering networks and k e honen’s self-organizing scheme. IEEE Transac- tions on Neural Networks, 4(4):549-557, July 1993.