CHRISTINA L. SODERLUND
Received 3 December 2004; Revised 20 April 2005; Accepted 24 July 2005
Let f :X→Xbe a self-map of a compact, connected polyhedron andΦ⊆Xa closed sub-set. We examine necessary and sufficient conditions for realizingΦas the fixed point set of a map homotopic tof. For the case whereΦis a subpolyhedron, two necessary condi-tions were presented by Schirmer in 1990 and were proven sufficient under appropriate additional hypotheses. We will show that the same conditions remain sufficient whenΦis only assumed to be a locally contractible subset ofX. The relative form of the realization problem has also been solved forΦa subpolyhedron ofX. We also extend these results to the case whereΦis a locally contractible subset.
Copyright © 2006 Christina L. Soderlund. This is an open access article distributed un-der the Creative Commons Attribution License, which permits unrestricted use, distri-bution, and reproduction in any medium, provided the original work is properly cited.
1. Introduction
Let f :X→Xbe a self-map of a compact, connected polyhedron. For any mapg, denote the fixed point set ofg as Fixg = {x∈X|g(x)=x}. In this paper, we are concerned with the realization of an arbitrary closed subsetΦ⊆Xas the fixed point set of a mapg homotopic to f.
Several necessary conditions for this problem are well known. IfΦ=Fixg for some mapg homotopic to f, it is clear thatΦmust be closed. Further, by the definition of a fixed point class (cf. [1, page 86], [7, page 5]), all points in a given component ofΦ must lie in the same fixed point class. Thus, as the Nielsen number (cf. [1, page 87], [7, page 17]) of any map cannot exceed the number of fixed point classes and as the Nielsen number is also a homotopy invariant, the setΦmust have at leastN(f) components. In particular, ifN(f)>0 thenΦmust be nonempty. It is also necessary that f|Φ, the
restriction of f to the setΦ, must be homotopic to the inclusion mapi:ΦX.
In [12], Strantzalos claimed that the above conditions are sufficient ifXis a compact, connected topological manifold with dimension=2, 4, or 5 and ifΦis a closed nonempty subset lying in the interior ofXwithπ1(X,X−Φ)=0. However, Schirmer disproved this claim in [10] with a counterexample and presented her own conditions, (C1) and (C2).
Definition 1.1[10, page 155]. Let f :X→Xbe a self-map of a compact, connected poly-hedron. The map f satisfies conditions (C1) and (C2) for a subsetΦ⊆Xif the following are satisfied (the symboldenotes homotopy of paths with endpoints fixed and∗the path product):
(C1) there exists a homotopyHΦ:Φ×I→Xfrom f|Φto the inclusioni:ΦX,
(C2) for every essential fixed point classFof f :X→X there exists a pathα:I→X withα(0)∈F,α(1)∈Φ, and
α(t)f ◦α(t)∗HΦα(1),t. (1.1)
The latter condition, (C2), reflects Strantzalos’ error. He apparently overlooked the H-relation of essential fixed point classes of two homotopic maps (cf. [1, pages 87–92], [7, pages 9, 19]).
Schirmer showed that (C1) and (C2) are both necessary conditions for realizingΦas the fixed point set of any mapghomotopic to f ([10, Theorem 2.1]). She then invoked the notion of by-passing ([9, Definition 5.1]) to prove the following sufficiency theorem. Alocal cutpointis any pointx∈Xthat has a connected neighborhoodUso thatU− {x} is not connected.
Theorem1.2 [10]. Let f :X→Xbe a self-map of a compact, connected polyhedron without a local cutpoint and letΦbe a closed subset ofX. Assume that there exists a subpolyhedron KofXsuch thatΦ⊂K, every component ofKintersectsΦ,X−Kis not a 2-manifold, and Kcan be by-passed. If(C1)and(C2)hold forK, then there exists a mapghomotopic to f withFixg=Φ.
Observe that Schirmer’s theorem permitsΦto beanytype of subset, provided it lies within an appropriate polyhedronK. However, all the required conditions are placed on the polyhedronK. If we wish to prove thatΦcan be the fixed point set, then we should require that our conditions be onΦitself. We can remedy this problem with a statement equivalent to that ofTheorem 1.2.
Theorem1.3. Let f :X→X be a self-map of a compact connected polyhedron without a local cutpoint and letΦbe a closed subpolyhedron ofXsatisfying
(1)X−Φis not a2-manifold, (2) (C1)and(C2)hold forΦ, (3)Φcan be by-passed.
Then for every closed subsetΓofΦthat has nonempty intersection with every component of Φ, there exists a mapghomotopic to f withFixg=Γ. In particular, ifΦis connected, then every closed subset ofΦ(includingΦitself) is the fixed point set of a map homotopic to f.
AlthoughTheorem 1.3requiresΦto be a subpolyhedron, the subsetΓ⊆Φis subject to few restrictions, thus preserving the broad scope of Schirmer’s original theorem.
polyhedra, this extension broadens the scope of the sufficiency theorem. Moreover, poly-hedral structure is a global property, whereas local contractibility is a local property and thus presumably easier to verify.
We examine a similar question for maps of pairs inSection 4. For any mapf : (X,A)→ (X,A) of a polyhedral pair, Ng ([8]) presented necessary and sufficient conditions for realizing a subpolyhedronΦ⊆X as the fixed point set of a map homotopic to f via a homotopy of pairs. Ng’s results solved a problem raised by Schirmer in [11]. Since Ng’s theory was never published, we include a sketch of his work for the convenience of the reader. We conclude by extending Ng’s results to the case where Φis a closed, locally contractible subset ofX(Theorem 5.3).
It is assumed that the reader is familiar with the general definitions and techniques of Nielsen theory, as in [1,7].
2. Neighborhood by-passing
LetXbe a compact, connected polyhedron andΦa subset ofX. We sayΦcan beby-passed inXif every path inXwith endpoints inX−Φis homotopic relative to the endpoints to a path inX−Φ.
The notion of by-passing plays a key role in relative Nielsen theory and in realizing fixed point sets. Currently, we wish to extendTheorem 1.3to the case whereΦis a locally contractible subset, but not necessarily a polyhedron (Theorem 3.5). To do so, we require a property that is closely related to by-passing. This property is the subject of the next definition.
Definition 2.1. A subsetΦof a topological spaceXcan beneighborhood by-passedif there exists an open setVinX, containingΦ, such thatVcan be by-passed.
IfΦis chosen to be by-passed, the next theorem suggests that adding the requirement thatΦalso be neighborhood by-passed does not affect our choice ofΦ.
Theorem 2.2. IfX is a compact, connected polyhedron, Φ⊆X is a closed, locally con-tractible subset, and ifΦcan be by-passed, thenΦcan be neighborhood by-passed.
Proof [3]. We prove this theorem in two steps. First we show that for any open neighbor-hoodUofΦ, there exists a closed neighborhoodN⊂UofΦ, withX−Npath connected. We then show that this neighborhoodNcan be chosen to be by-passed inX.
Step 1. Given an open neighborhoodU of Φ, there existsN⊂U, a closed neighborhood ofΦ, withX−N path connected. LetU⊂X be any open neighborhood ofΦ. Choose a closed neighborhoodMofΦ, contained inU. ThenX−U can be covered by finitely many components ofX−M. (This follows from compactness sinceX−Uis closed inX and therefore compact.)
SinceΦcan be by-passed inX, we can connect each pair of these components by a path inX−Φ. In particular, for each pair of componentsMi andMjofX−M, choose pointsxi∈Miandxj∈Mjand choose a path
with
pi j(0)=xi, pi j(1)=xj (2.2) (xiandxjcan lie either inUor its complement).
Next we find a closed neighborhoodK ofΦ, contained inM, such thatK misses all the pathspi j. This is possible since
X−Int(M)∪pi j
(2.3) is compact (where Int(M) denotes the interior ofM).
We will prove that there is exactly one path component of the complement of suchK which containsX−U.
First, observe that each componentMi ofX−M must lie in a single component of X−K. If this was false, then for each componentKj ofX−K which intersectsMi, we could writeMi as a disjoint union of clopen sets,
Mi= j
Mi∩Kj, (2.4)
contrary to the connectedness ofMi.
Now suppose there exist two different componentsMi and Mj ofX−M, lying in different components ofX−K. Then the pathpi j, as defined above, lies entirely within X−K(by definition ofK). Butpi jmust also intersect the two components ofX−K, thus contradicting the connectedness of paths. Therefore,Mi andMj (and hence all compo-nents ofX−M) lie in a single component ofX−K. This component therefore contains X−U.
Finally, letWbe the path component ofX−KcontainingX−U. We have
X−U⊂W⊂X−K, (2.5)
and hence
Φ⊂K⊂X−W⊂U. (2.6)
DefineN=X−W. ThenN⊂U is a closed neighborhood of Φwith path connected complement.
Step 2. We can choose the closed neighborhoodN from Step 1to be a subset that can be by-passed inX: sinceX is a compact, connected polyhedron, it has a finitely generated fundamental group at any basepoint. Choose a basepointa∈(X−Φ) and finitely many generators (loops)
ρ1,. . .,ρn:I−→X (2.7)
ofπ1(X,a). AsΦcan be by-passed, these loops may be homotoped offΦ. Thus without a loss of generality, we can rename these generators
Let
P= n
i=1 Imρi
(2.9)
be a compact subset ofX−Φ, where Im(ρi) denotes the image of the pathρi. LetUbe an open neighborhood ofΦwithU∩P= ∅.
Then any loopαinXwith basepointa∈X−Φcan be expressed as a word consisting of a finite number of loops inX−U. Thus,αis homotopic to a loop inX−U.
Now as inStep 1, choose N in U having path connected complement. Then by [9, Theorem 5.2],Nmay be by-passed. ChoosingV=Int(N) completes the proof.
3. Realizing subsets of ANRs as fixed point sets
Our present goal is to show that if the subsetΦinTheorem 1.3is chosen to be locally contractible, but not necessarily polyhedral, the results of this theorem still hold. In par-ticular, every closed subset ofΦthat intersects every component ofΦcan be realized as the fixed point set of a map homotopic to f. We will prove this by constructing a sub-polyhedron ofXthat contains suchΦand also satisfies the hypotheses ofTheorem 1.3.
Lemma3.1. If Φis a closed subset of a compact, connected polyhedron X andX−Φis not a 2-manifold, then there exists a closed neighborhoodNofΦsuch thatX−N is not a 2-manifold.
Proof. SinceX−Φis not a 2-manifold, there exists an elementx∈X−Φwith the prop-erty that no neighborhood ofxis homeomorphic to the 2-disk.
Let d denote distance in X and suppose d(x,Φ)=δ >0. Then the closed δ/ 2-neighborhoodNofΦsatisfies the property thatX−Nis not a 2-manifold.
Definition 3.2. LetYbe a metric space with distancedand choose a real-valued constant ε >0. Given any topological spaceX, two mapsf,g:X→Yareε-near ifd(f(x),g(x))< ε for everyx∈X. A homotopyH:X×I→Y is called anε-homotopy if for anyx∈X, diam (H(x×I))< ε.
Here we assume the usual definition ofdiameter: given a subsetA⊆Xand the distance donX, diam(A)=sup{d(x,y)|x,y∈A}. Thus,
diamH(x×I)=supdH(x,t),H(x,t)|t,t ∈I. (3.1)
Theorem3.3 [4, Proposition 3.4, page 121]. IfXis a metric ANR andΦis a closed ANR subspace ofX, then for everyε >0, there exists anε-homotopyht:X→Xsatisfying
(1)h0=idX,
(2)ht(x)=xfor allx∈Φ,t∈I,
The mapht is called astrong deformation retractionof the spaceUonto the subspace Φ. We also sayUstrong deformation retractsontoΦ.
Lemma3.4. Let f :X→Xbe a self-map of a compact, connected polyhedron and letΦbe a closed subset ofX. Assume that there exists a subsetBofXsuch thatΦ⊆BandBstrong deformation retracts ontoΦ. If f satisfies(C1)and(C2)forΦ, then f satisfies(C1)and (C2)forB.
Proof. To verify (C1) forB, letR:B×I→Bdenote the strong deformation retraction fromBontoΦ, and denoteR(b,t)=rt(b) for anyb∈B,t∈I. Sor0(b)=b,r1(b)∈Φ, andrt|Φ=idΦ. We will construct a homotopyHB:B×I→Xfrom f |Bto the inclusion
i:BX.
LetH:B×I→Xbe the composition
H(b,t)=
⎧ ⎨ ⎩
f ◦r2t(b) 0≤t≤1/2,
HΦr1(b), 2t−1 1/2≤t≤1, (3.2)
whereHΦis the homotopy given by (C1) onΦ. Then f is homotopic tor1viaH.
Next we can construct a homotopyHB:B×I→Xas follows:
HB(b,t)=
⎧ ⎨ ⎩
H(b, 2t) 0≤t≤1/2,
R(b, 2−2t) 1/2≤t≤1. (3.3)
Observe that f|Bis homotopic to the identity viaHB. Thus,HBgives the desired homo-topy satisfying (C1) forB.
To prove (C2), choose any essential fixed point classFof f :X→X. As f satisfies (C2) forΦ, there exists a pathα:I→Xwithα(0)∈Fandα(1)∈Φ⊆B, whenceα(1)∈B.
We show that the homotopyHB:B×I→X constructed above can be viewed as an extension ofHΦ:Φ×I→X. To see this, note that sinceR:B×I→Bis a strong
defor-mation retraction, for anyx∈Φ,
HB(x,t)=
⎧ ⎨ ⎩
H(x, 2t) 0≤t≤1/2, x 1/2≤t≤1, H(x,t)=
⎧ ⎨ ⎩
f ◦r2t(x)=f(x) 0≤t≤1/2, HΦ(x, 2t−1) 1/2≤t≤1.
(3.4)
Thus for anyx∈Φ,
HB(x,t)=
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩
f(x) 0≤t≤1/4, HΦ(x, 4t−1) 1/4≤t≤1/2,
x 1/2≤t≤1,
and we sayHB|Φis areparametrizationofHΦ. Then by defining a continuous mapφ:I→
Iby
φ(s)=
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩
0 0≤s≤1/4, 4s−1 1/4≤s≤1/2, 1 1/2≤s≤1,
(3.6)
it is clear thatHB|Φ=HΦ◦(id×φ), whereiddenotes the identity map onΦand
(id×φ)(x,s)=x,φ(s), (3.7) for anyx∈Φ,s∈I. Therefore,HΦis homotopic toHB|Φvia the homotopyH: (X×I)×
I→X, defined by
H(x,t,s)=HΦx,φt(s), (3.8)
where
φt(s)=(1−t)φ(s) +ts. (3.9) Finally, since f satisfies (C2) forΦ, we know that for any essential fixed point classF of f, there exists a pathαinXwithα(0)∈F,α(1)∈Φ, and
α(t)f ◦α(t)∗HΦα(1),t. (3.10)
From the above argument,{HΦ(α(1),t)}{HB(α(1),t)}. Therefore,
α(t)f ◦α(t)∗HBα(1),t (3.11)
and f satisfies (C2) forB.
As a consequence of the above results, we are now able to extendTheorem 1.3to the case whereΦis locally contractible.
Theorem3.5. Let f :X→X be a self-map of a compact connected polyhedron without a local cutpoint. LetΦbe a closed, locally contractible subspace ofXsatisfying
(1)X−Φis not a2-manifold, (2) f satisfies(C1)and(C2)forΦ, (3)Φcan be by-passed.
Then for every closed subsetΓofΦthat has nonempty intersection with every component of Φ, there exists a mapghomotopic to f withFixg=Γ. In particular, ifΦis connected, then every closed subset ofΦ(includingΦitself) is the fixed point set of a map homotopic to f.
The proof of this theorem requires a polyhedral construction known as thestar cover of a subset. LetKbe a triangulation ofX. We writeX= |K|. Then for any vertexvofK, define thestar of v, denoted StK(v), to be the union of all closed simplices of whichvis a vertex. Then for any subspaceΦ⊆X, thestar cover of Φis
StK(Φ)=
v∈Φ
(4,0) (8,0) (11,0)
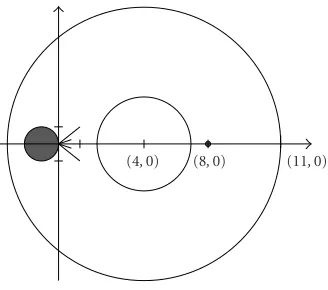
Figure 3.1. A locally contractible fixed point set.
Proof ofTheorem 3.5. We can assumeΦ= ∅as, otherwise, this theorem reduces to [10, Lemma 3.1]. SinceXis a polyhedron, letK be a triangulation ofX= |K|. By [2, Propo-sition 8.12, page 83],Φis a finite-dimensional ANR. Thus,Theorem 3.3gives an open neighborhoodUofΦthat strong deformation retracts ontoΦ. SinceΦcan be by-passed, Theorem 2.2implies that there exists another open neighborhoodVofΦsuch thatVcan be by-passed. The setV may be chosen to lie insideU. Choose a star cover StK (Φ) ofΦ with respect to a sufficiently small subdivisionK ofKsuch that StK (Φ)⊂V. Then (C1) and (C2) hold for StK(Φ) (Lemma 3.4). Further, the subdivisionK can be chosen small enough so thatX−StK(Φ) is not a 2-manifold (Lemma 3.1).
By the construction of star covers, each component of StK(Φ) contains a component ofΦ. If every component ofΦ, in turn, intersects a given closed subsetΓ⊂Φ, then each component of the star cover intersects Γ. As star covers are themselves polyhedra, the
result follows fromTheorem 1.3.
We close this section with an example of a self-map f on a compact, connected poly-hedronX, with a locally contractible subsetΦthat is not a finite polyhedron, for which there existsghomotopic to f with Fixg=Φ.
Example 3.6. Consider the space
X=(x,y)∈R2|4≤(x−4)2+y2≤49, (3.13)
the annulus inR2centered at the point (4, 0), with outer radius 7 and inner radius 2 (see Figure 3.1). Letf :X→Xbe the map flippingXover thex-axis. That is,f(x,y)=(x,−y).
Clearly Fix(f) lies on thex-axis and f has exactly two fixed point classes,
We defineΦ=D∪Z∪ {(8, 0)}where
D=(x,y)|(x+ 1)2+y2≤1, Z=
∞
k=1
0,zk∪0,z−k.
(3.15)
For each positive integerk, [0,zk] denotes the line segment inR2from the point (0, 0) to the point (1/k, 1/k2), and [0,z
−k] is the line segment from (0, 0) to (1/k,−1/k2).
First we show thatΦis locally contractible. At the origin, a sufficiently small neigh-borhood contracts via straight lines. Also for eachk, given any point on the line segment [0,zk], we can find a neighborhood that does not contain any other segment ofΦ, and hence contracts along the segment [0,zk]. Lastly, it is clear thatD is itself locally con-tractible.
The subsetΦis also clearly closed and can be by-passed inX. Thus, it remains to be shown that f satisfies (C1) and (C2) forΦ.
To verify (C1), observe thatΦis homotopy equivalent toF1∪F2. Let r:Φ→F1∪ F2 and s:F1∪F2→Φ, wheres◦ridΦ and r◦sidF1∪F2. We have the sequence of
homotopies
f|Φ=f|Φ◦idΦf|Φ◦(s◦r)=s◦ridΦ, (3.16)
where the second equality holds true because f is the identity map onF1∪F2.
To prove (C2), we must find an appropriate pathαifor each classFi(i=1, 2). ForF1, we can chooseα1to be the constant path at the point (−1, 0), and forF2we can chooseα2 to be the constant path at the point (8, 0). The point at which we defineαiis unimportant, provided that the point lies in the intersection ofΦwith the fixed point class. It is clear thatαi(0)∈Fiandαi(1)∈Φfori=1, 2. Moreover, the required homotopy holds trivially, thus proving (C2).
Therefore byTheorem 3.5,Φis the fixed point set of a map homotopic to f. It is clear thatΦis not a finite polyhedron, thus showing that there exist interesting sets that satisfy the hypotheses ofTheorem 3.5, but do not satisfy the hypotheses ofTheorem 1.3.
4. Polyhedral fixed point sets of maps of pairs
Given a compact polyhedral pair (X,A), letZ=cl(X−A) denote the closure ofX−A. For any subsetΦ⊆X, letΦA=A∩Φ. We call (Φ,ΦA) asubset pairof (X,A). For any map f : (X,A)→(X,A), denote the restrictionf|AasfA:A→A. We write f Agif there exists ahomotopy of pairsH: (X,A)×I→(X,A) from f togwhere (X,A)×Idenotes the pair (X×I,A×I). If f Ag, it follows that fAgAvia the restriction of the homotopy toA.
In [8], Ng developed the following definition and theorems. As all the proofs can be found in [8], we provide only a sketch of each proof here. All references to (C1) and (C2) are to Schirmer’s conditions, as stated inDefinition 1.1.
(the symboldenotes the usual homotopy of paths with endpoints fixed and∗the path product):
(C1) there exists a homotopyH : (Φ,ΦA)×I→(X,A) from f|Φto the inclustion i:
ΦXand the map fAsatisfies (C1) and (C2) forΦAinAwhereHΦA=H|ΦA×I,
(C2) for every essential fixed point classFof f intersectingZ, there exists a pathα:I→ Zwithα(0)∈F∩Z,α(1)∈Φ, and
α(t)f ◦α(t)∗ Hα(1),t. (4.1)
Theorem4.2. Let f : (X,A)→(X,A)be a map of a compact polyhedral pair. If f satisfies conditions(C1)and(C2)for a subsetΦ⊆X, then f satisfies(C1)and(C2)forΦ. Sketch of proof. First observe that by choosingAto be the empty set, (C1) implies (C1). To prove (C2), choose any essential fixed point classFof f. We can write
F=FA∪FZ, (4.2)
where
FA=F∩A, FZ=F−Int(A)=F∩Z. (4.3) By [5, Theorem 1.1], there exists an integer-valued index indA(f,FZ) such that
indA
f,FZ=ind(f,F)−indfA,FA, (4.4) where “ind” denotes the classical fixed point index.
Suppose indA(f,FZ)=0. Write
FZ=F1∪ ··· ∪Fk, (4.5) where for eachibetween 1 andk,Fidenotes the intersection ofFwith a path component ofZ. It follows from [5] that indA(f,FZ)=
k
i=1indA(f,Fi). Then since indA(f,FZ)=0, there exists at least oneifor which indA(f,Fi)=0. ThisFican be written as a finite union of fixed point classes of f intersectingZ. At least one of these classes must be an essential class off intersectingZ. Denote this class asG. Then by (C2), there exists a pathα:I→Z withα(0)∈G⊆F,α(1)∈Φand
α(t)f ◦α(t)∗ Hα(1),t, (4.6) thus proving (C2) for this case.
Next suppose that indA(f,FZ)=0. Then ind(fA,FA)=0, implying thatFAis an es-sential fixed point class of fA. From (C1) there exists a pathα:I→Awithα(0)∈FA, α(1)∈ΦA⊂Φ, and
α(t)fA◦α(t)
∗HΦα(1),t
=f◦α∗ Hα(1),t, (4.7)
Corollary4.3. Let f : (X,A)→(X,A)be a map of a compact polyhedral pair. If f satisfies conditions(C1)and(C2)for a subsetΦ⊆X, thenΦhas at leastN(f)components and ΦAhas at leastN(fA)components.
It is worthwhile to observe that in some cases, (C2) is easy to check. In particular, f satisfies (C2) forΦ⊆Xif any of the following is satisfied ([8]):
(1)N(f|Z)=0,
(2)Xis simply connected,
(3)Φ⊆Fixf ∩ZandΦintersects every essential fixed point class of f onZ.
Theorem4.4 (necessity). Let f : (X,A)→(X,A)be a map of a compact polyhedral pair and letΦbe a subspace ofX. If there exists a mapgA f withFixg=Φ, then f satisfies (C1)and(C2)forΦ.
Sketch of proof. LetHdenote the homotopy of pairs from f tog. It is clear that by letting
H=H|Φ×Iand applying [10, Theorem 2.1], f satisfies (C1).
To prove (C2), choose any essential fixed point classFof f intersectingZ. It follows from [13, Theorem 2.7] that there exists an essential fixed point classGofgintersecting Z, to whichFisH-related. Thus, there exists a pathα:I→Z withα(0)∈F,α(1)∈Φ, and
α(t)Hα(t),t
Hα(t), 0∗Hα(1),t =f ◦α(t)∗ Hα(1),t.
(4.8)
Therefore f satisfies (C2) forΦ.
Theorem4.5 (Ng’s finiteness theorem). Let f : (X,A)→(X,A)be a map of a compact polyhedral pair in whichXandAhave no local cutpoints. Suppose(Φ,ΦA)is a subpolyhedral pair such that
(1)A−ΦAis not a 2-manifold, (2)ΦAcan be by-passed inA, (3) f satisfies(C1)forΦ.
Then there exists a mapgA f via a homotopyH: (X,A)×I→(X,A)that extendsHsuch thatFixg=Φ∪Zo, whereZo is a finite subset ofX−Aand each point ofZo lies in the interior of a maximal simplex ofX.
Sketch of proof. To construct the homotopyH, we will build three homotopiesH1,H2, andH3, and take their composition.
From conditions (1)–(3), we can apply [10, Lemma 3.1] to show that there exists a mapg1,Ahomotopic to fA with Fixg1,A=ΦAvia a homotopyHA:A×I→Athat is an extension ofH|ΦA×I. Consider the homotopyH1,A: (A∪Φ,A)×I→(X,A) defined by
H1,A(x,t)=
⎧ ⎨ ⎩
HA(x,t) (x,t)∈A×I,
By the homotopy extension property, there is a homotopyH1: (X,A)×I→(X,A) that is an extension ofH1,A; letf1(x)=H1(x, 1). It is easy to check thatΦ⊆Fixf1, Fixf1|A=ΦA, andH1extendsH.
To constructH2, choose a strong deformation retractionR: St(A∪Φ)×I→St(A∪ Φ) of a star cover ofA∪Φonto the setA∪Φ. We will abbreviate StA∪Φfor the star cover
St(A∪Φ). We can defineH2: (X,A)×I→(X,A) to be an extension of the composition f1◦R: (StA∪Φ,A)×I→(X,A). Setting f2(x)=H2(x,t), it is easy to check that Fixf2|A=
ΦAand Fixf2=A∪(X−StA∪Φ).
By a careful application of the Hopf construction, we can find a mapf3: cl(X−StA∪Φ) →Xthat isε-homotopic to f2|cl(X−StA∪Φ), wheref3has only a finite number of fixed points, each lying in the interior of a maximal simplex ofX. LetH3,cl: cl(X−StA∪Φ)×I→X
denote the homotopy from f2|cl(X−StA∪Φ) to f3. We construct another homotopy H3: (∂(StA∪Φ)∪A∪Φ,A)×I→(X,A) as follows:
H3(x,t)=
⎧ ⎨ ⎩
H3,cl(x,t) (x,t)∈∂StA∪Φ,
f2(x) (x,t)∈A∪Φ. (4.10)
ThenH3can be extended to a homotopyH3,St: (StA∪Φ,A)×I→(X,A). Finally, we define
H3: (X,A)×I→(X,A) by
H3(x,t)=
⎧ ⎨ ⎩
H3,St(x,t) x∈StA∪Φ,
H3,cl(x,t) x∈clX−StA∪Φ. (4.11)
One can check that if we letHbe the composition of the homotopiesH1,H2, andH3
and defineg(x)=H(x, 1), we complete the proof.
Theorem4.6 (Ng’s sufficiency theorem #1). Let f : (X,A)→(X,A)be a map of a compact polyhedral pair in whichXandAhave no local cutpoints. Suppose(Φ,ΦA)is a subpolyhedral pair such that
(1)A−ΦAand all components ofX−(A∪Φ)are not 2-manifolds, (2) f satisfies(C1)and(C2)forΦ,
(3)ΦAcan be by-passed inA,Φcan be by-passed inX−Aand∂Acan be by-passed inZ. Then there exists a mapgA f withFixg=Φ.
Sketch of proof. FromTheorem 4.5, there exists a mapg1A f via a homotopyH: (X, A)×I→(X,A) that extendsH with Fixg1=Φ∪Zo, whereZois a finite subset ofX−A and each point of Zo lies in the interior of a maximal simplex ofX. To construct the desired mapg, we use a sequence of homotopies relative toA∪Φ.
Using techniques from [6,9], one can show that the following procedures are possible in this scenario.
(1) Given any two pointsx,y∈Fixg1∩(X−A) that lie in the same fixed point class ofg1intersectingZ, we can delete the pointxfrom Fixg1by an appropriate ho-motopy. This requires the assumption that every component ofX−(A∪Φ) is not a 2-manifold.
addition to the first assumption, this requires that∂Acan be by-passed inZand Φcan be by-passed inX−A.
(3) Any pointx∈Fixg1∩(X−A) with ind(f,x)=0 can be removed in the usual way.
After a finite number of applications of the above procedures, we achieve a new map gA f. Ifg is fixed point free onX−(Φ∪A), we are done. If Fixg∩(X−(Φ∪A))= ∅, then any pointx∈Fixg∩(X−(Φ∪A)) forms an entire essential fixed point class ofg. A slight modification of the proof of [10, Lemma 3.1] shows that this scenario is
impossible.
In the original statement ofTheorem 4.6, Ng required that no component ofA−ΦA be a 2-manifold. However, this assumption is not required for the proof and therefore omitted.
Theorem4.7 (Ng’s sufficiency theorem #2). Let f : (X,A)→(X,A)be a map of a compact polyhedral pair in whichXandAhave no local cutpoints. Suppose(Φ,ΦA)is a subpolyhedral pair such that
(1)A−ΦAand all components ofX−(A∪Φ)are not 2-manifolds, (2) f satisfies(C1)and(C2)forΦ,
(3)ΦAcan be by-passed inA,Φcan be by-passed inX−A, and∂Acan be by-passed inZ. Then for every closed subsetΓofΦthat has nonempty intersection with every component of ΦAand every component ofΦ∩Z, there exists a mapgA f withFixg=Γ.
Sketch of proof. LetKbe a triangulation ofX= |K|. As in the proof of [10, Theorem 3.2], we can find a subpolyhedronNin a subdivisionK ofKsuch that f|Nis a proximity map with only a finite number of fixed points, all lying inΓ⊆Int(N). Letα(x,y,t) be defined as in [1, Lemma 1, page 124]. Define a homotopyHN: (N,N∩A)×I→(X,A) by
HN(x,t)=α
x,f(x), 1−t1−d(x,Γ), (4.12)
whereddenotes the usual distance function. It is not difficult to check thatHNis a special homotopy (cf. [6, page 751]) on∂N×I and that FixHN(x, 1)=Γ. Next, we can extend HN to a new homotopyH: (X,A)×I→(X,A) that is special on cl(X−N). If we let
g(x)=H(x, 1), thengA f and Fixg=Γ.
5. Locally contractible fixed point sets of maps of pairs
We wish to extend Ng’s work (in particular,Theorem 4.7) to the case whereΦis locally contractible, but not necessarily a polyhedron. To do so, we first prove a useful lemma and theorem.
Proof. First observe that since f satisfies (C1) forΦ, fAsatisfies (C1) and (C2) forΦA inA. ThenLemma 3.4shows that fA satisfies (C1) and (C2) forB∩A. This proves the second statement in (C1). A simple modification of the proof ofLemma 3.4proves the first statement in (C1) and also proves that f satisfies (C2) forB.
Theorem 5.2. Let f : (X,A)→(X,A) be a map of a compact polyhedral pair. Suppose (Φ,ΦA)is a subset pair in which bothΦandΦAare closed, locally contractible subsets ofX. Then there exists a subsetBofXsuch thatΦ⊆Band the pair(B,B∩A)strong deformation retracts onto(Φ,ΦA)via a retraction of pairst: (B,B∩A)→(B,B∩A).
Proof. We will construct three homotopies and then take their composition to obtain an explicit strong deformation retraction of pairs. First, we must establish some terminology. SinceX itself is an ANR embedded in Euclidean space, there exists a neighborhood V⊂Rn(n >0) ofXthat strong deformation retracts ontoX. Let
ρt:V−→X (5.1)
denote this strong deformation retraction. The subsetΦis also a finite-dimensional ANR ([2, Proposition 8.12, page 83]). Thus, there exists a neighborhoodU⊂X that strong deformation retracts ontoΦ. Let
ϕt:U−→Φ (5.2)
denote this strong deformation retraction. Define
ε=mindX,Vc,dΦ,Uc, (5.3) whereVcandUcdenote the complements ofV andUinRnandX, respectively.
Choose any three positive real numbersε1,ε2, andε3so that
ε1+ε2+ε3< ε. (5.4)
The subsetsΦand ΦA are both finite-dimensional ANR’s. Thus, there exist neighbor-hoodsU1,U2⊂Xand strong deformation retractionsRt:U1→Φandrt:U2→Φthat areε1- andε2-homotopies, respectively (Theorem 3.3). In other words, for eachx∈U1,
dRt(x),Rt(x)< ε1, for anyt,t ∈I (5.5) and for eachx∈U2,
drt(x),rt(x)< ε2, for anyt,t ∈I. (5.6) Notice that although bothRtandϕtare strong deformation retractions of neighborhoods ofΦonto itself, we neither require thatU1=Unor thatRt|U1∩U=ϕt|U1∩U.
Next defineδ1,δ2>0 by
and letΔ=min(δ1,δ2). DefineBto be aΔ-neighborhood ofΦ. ThenΦ⊂B⊆U1 and ΦA⊂B∩A⊆U2. By restrictingRttoBandrttoB∩A, we can view these maps as strong deformation retractions ofBontoΦand ofB∩AontoΦA, respectively.
Next, since the subsetAis a subpolyhedron ofX, it must also be a finite-dimensional ANR. Thus, there exists a neighborhoodW⊂XcontainingAand a strong deformation retractionψt: W→Athat is anε3-homotopy. For ease of notation, we will letx =ψ1(x) for anyx∈W.
Let us chooseΩ=d(cl(B∩A),X−W) and define a set
C=x∈B−B∩A|dx, cl(B∩A)≤Ω. (5.8) For anyx∈C, let
dx, cl(B∩A)=s≤Ω, d(x,Φ)=q <Δ. (5.9) Finally, we letβ=max(Ω,Δ)>0, and we define our first homotopy to be the mapHt: (B,B∩A)→(B,B∩A) defined by
Ht(x)=
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
x x∈B−C,
ρ1−t
ψt(x),x1 β
x∈C,q=s, ρ1−t
ψt(x),xq
β+ (s−q)x
1 s
x∈C,q < s, ρ1−t
ψt(x),x
s
β+ (q−s)ψt(x)
1
q
x∈C,q > s,
(5.10)
whereψt(x),x =(β−s)ψt(x) +sx.
We must check that Ht is defined onC. By the definition of C, ifx∈Cthen x∈ B∩W. Thus,ψt(x) is defined. Next, sinces≤Ω≤β, for eacht∈Ithe expressionψt(x), x(1/β)=[(β−s)ψt(x) +sx](1/β) represents a point lying on the straight path inRn be-tweenψt(x) andx. Sinceψt(x) is anε3-homotopy, the length of this path must be less thanε3. Moreover,
ε3< ε=mindX,Vc,dΦ,Uc (5.11) andψt(x),x∈X. Thus all points on this straight path must lie inV, whenceρ1−t(ψt(x), x(1/β) exists.
To see thatHt(x) is defined forx∈Cwithq < s, observe that for eacht∈Ithe expres-sion
ψt(x),x
q
β+ (s−q)x
1 s =
q(β−s)ψt(x) +sx
1
β+ (s−q)x
1
s (5.12)
must lie inV. Thus,ρ1−t([ψt(x),x(q/β) + (s−q)x](1/s)) is defined. A similar argument holds forx∈Cwithq > s. Therefore,Ht(x) is defined for allx∈C.
It is straightforward to check thatHtis continuous,H0=idB, andHtis a homotopy of pairs.
We define the second homotopy of pairs in the composition to beJt: (B,B∩A)→ (Φ,Φ∩A) such that
Jt(x)=
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
rt(x) x∈B∩A,
Rt(x) x∈(B−B∩A)−C,
ρtrt(x ),Rt(x)1 β
x∈C,q=s, ρt
rt(x),Rt(x)q
β+ (s−q)Rt(x)
1
s
x∈C,q < s, ρt
rt(x),Rt(x)s
β+ (q−s)rt(x)
1
q
x∈C,q > s.
(5.13)
It is clear thatJt is defined and continuous outsideC. However, we must again check thatJt is defined onC. For anyx∈C, we havex∈B∩W andx ∈B∩A. Thus,Rt(x) andrt(x) are defined. Next, sinces≤Ω≤β, the expressionrt(x ),Rt(x)(1/β)=[(β− s)rt(x ) +sRt(x)](1/β) represents a point lying on the straight path inRnbetweenrt(x) andRt(x). Now for eacht∈I the distance from Rt(x) to rt(x ) satisfies the following inequality:
dRt(x),rt(x )
≤dRt(x),x
+d(x,x ) +dx,rt(x )
=dRt(x),R0(x)
+dψ0(x),ψ1(x)+dr0(x),rt(x )
< ε1+ε3+ε2< ε.
(5.14)
Sinceε=min(d(X,Vc),d(Φ,Uc)) andR
t(x),rt(x)∈X, all points on the straight path betweenrt(x) andRt(x) must lie inV. Therefore, the expression
ρtrt(x),Rt(x)1 β
=ρt(β−s)rt(x) +sRt(x)1 β
(5.15)
is defined forx∈C. Moreover, as a composition of continuous functions, the expression is continuous. Therefore,Jtis defined and continuous forx∈Cwithq=s.
We denote the third and final homotopy in the construction by Kt : (B,B∩A)→ (Φ,ΦA), where
Kt(x)=
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
r1(x) x∈B∩A,
R1(x) x∈(B−B∩A)−C,
ϕtr1(x),R1(x)1 β
x∈C,q=s, ϕtr1(x),R1(x)q
β+ (s−q)R1(x)
1
s
x∈C,q < s, ϕt
r1(x),R1(x)s
β+ (q−s)r1(x)
1 q
x∈C,q > s.
(5.16)
We must again check that our homotopy is defined onC. Forx∈C, all points in the expressionr1(x ),R1(x)(1/β)=[(β−s)r1(x) +sR1(x)](1/β) lie on the straight path be-tweenr1(x) andR1(x). From (5.14), the length of this path must be less thanε. Since ε=min(d(X,Vc),d(Φ,Uc)) and r1(x),R1(x)∈Φ, all points on this path must lie in U. Therefore,ϕt(r1(x),R1(x)(1/β))=ϕt([(β−s)r1(x ) +sR1(x)](1/β)) is defined. The proof thatKt(x) is defined forx∈Cwithq < sorq > sis similar to that ofHtandJt, and hence omitted. It is straightforward to check thatKtis continuous onXand thatKtis a homotopy of pairs.
Finally, we define our strong deformation retraction of pairs as t : (B,B∩A)→ (Φ,ΦA), where
t(x)=
⎧ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎩
H3t(x) 0≤t≤1/3, J3t−1(x) 1/3≤t≤2/3, K3t−2(x) 2/3≤t≤1.
(5.17)
One can check that for allx∈B,1/3(x)=H1(x)=J0(x) and2/3(x)=J1(x)=K0(x). It remains to show thatt is indeed a strong deformation retraction of pairs. In other words, we must check that 0=idB,1(B)⊆Φ,1(B∩A)⊆ΦA, and for allt∈I,
t|Φ=idΦandt|ΦA=idΦA. By the construction oft, it is clear that0=H0(x)=idB, 1(B∩A)⊆ΦA, andt|ΦA=idΦA.
To see that1(B)⊆Φ, observe that1(x)=J1(x) for allx. It is clear thatJ1(x)∈Φ for allx∈B−C. Forx∈C, the pointJ1(x) is obtained by evaluatingϕ1at some point in U. Sinceϕt:U→Φis a strong deformation retraction,ϕ1(U)⊆Φ. Therefore,J1(x)∈Φ for allx∈C, and hence for allx∈B.
Finally, to see thatt|Φ=idΦ, choose any x∈Φ. Ifx∈Φ∩B−C thent(x)= Rt(x)=x. Ifx∈C∩Φ, thend(x,Φ)=0=q < s, whenceHt(x)=ρ1−t(x)=x,Kt(x)= ρt(Rt(x))=x, andJt(x)=ρt(R1(x))=x. Therefore, t|Φ=idΦ, which completes the
proof.
Theorem5.3. Let f : (X,A)→(X,A)be a map of a compact polyhedral pair in whichX andAhave no local cutpoints. Suppose(Φ,ΦA)is a subset pair in whichΦ,ΦA, andΦ∩Z are closed, locally contractible subsets ofXsuch that
(1)A−ΦAand all components ofX−(A∪Φ)are not 2-manifolds, (2) f satisfies(C1)and(C2)forΦ,
(3)ΦAcan be by-passed inA,Φ∩Zcan be by-passed inZ, and∂Acan be by-passed inZ. Then for every closed subsetΓofΦthat has nonempty intersection with every component of ΦAand every component ofΦ∩Z, there exists a mapgA f withFixg=Γ.
Proof. IfΦ= ∅, then this theorem reduces to a special case of [10, Lemma 3.1]. Thus, we may assumeΦ= ∅. LetK be a triangulation ofX= |K|. By [2, Proposition 8.12, page 83], bothΦandΦAare finite-dimensional ANR’s.
FromTheorem 5.2, there exists a subsetBofXsuch thatΦ⊆Band the pair (B,B∩A) strong deformation retracts onto the pair (Φ,ΦA).Lemma 3.1guarantees that we can find a star cover StK(Φ) ofΦwith respect to a sufficiently small subdivisionK ofKsuch that StK(Φ)⊆Band the setsA−(StK (Φ)∩A) andX−(A∪StK(Φ)) are not 2-manifolds. It follows fromLemma 5.1, by restricting the retraction, that f satisfies (C1) and (C2) for StK(Φ).
By assumption,ΦAcan be by-passed inA. SinceAis a polyhedron,Theorem 2.2shows thatΦAcan be neighborhood by-passed inX. Likewise,Φ∩Zcan be neighborhood by-passed inZ. ThereforeK may be chosen with mesh small enough so that StK (Φ)∩A can be by-passed inAand StK(Φ)∩Z can be by-passed inZ. Then StK(Φ)∩(X−A) can also be by-passed inZ. Thus any path with endpoints inX−Ais homotopic to a path inZ=cl(X−A). But∂Acan also be by-passed inZ, implying that such a path must be homotopic to a path inX−A. Therefore StK(Φ)∩(X−A) can be by-passed inX−A.
Now by the construction of star covers, each component of StK (Φ) contains a com-ponent ofΦand every component ofΦis contained in a component of StK(Φ). Choose any closed subsetΓof Φ, having nonempty intersection with every component of ΦA and every component ofΦ∩Z. ThenΓalso has nonempty intersection with every com-ponent of StK (Φ)∩Aand with every component of StK(Φ)∩Z. Finally, sinceK is a triangulation of bothXandA, the set StK (Φ)∩Ais a subpolyhedron ofAand thus itself a polyhedron. Therefore, the result follows fromTheorem 4.7.
Corollary5.4. Let f : (X,A)→(X,A)be a map of a compact polyhedral pair. Suppose (Φ,ΦA)is a subset pair in which bothΦandΦAare closed, locally contractible subsets ofX such that
(1)A−ΦAand all components ofX−(A∪Φ)are not 2-manifolds, (2) f satisfies(C1)and(C2)forΦ,
(3)ΦAcan be by-passed inA,Φ∩Zcan be by-passed inZ, and∂Acan be by-passed inZ. Then there exists a mapgA f withFixg=Φ.
We conclude this paper with an example of a map f : (X,A)→(X,A) of a polyhedral pair, having a locally contractible subset pair (Φ,ΦA), for which there existsgA f with Fixg=Φ.
Example 5.5. Consider the subsetΦinExample 3.6. LetA=Φ∩RwhereRdenotes the closed rectangle
R=(x,y)∈R2| −2≤x≤0,−ε≤y≤ε, (5.18)
for any positive real numberε <1/2. ThenΦA=A, vacuously implying thatA−ΦA is not a 2-manifold and thatΦAcan be by-passed inA. As we saw inExample 3.6, the only component ofX−(A∪Φ)=X−Φis not a 2-manifold. It is also easy to check thatΦ∩Z can be by-passed inZand that∂Acan be by-passed inZ.
Letf : (X,A)→(X,A) be the map flippingXover thex-axis. That is, f(x,y)=(x,−y), as inExample 3.6. It remains to show that f satisfies (C1) and (C2) forΦ.
To see that f satisfies (C1), recall fromExample 3.6thatΦis homotopy equivalent to F1∪F2, the union of the two fixed point classes off. Likewise,ΦAis homotopy equivalent toF1. Asf(ΦA)⊆ΦA, the homotopyHΦfrom (C1) inExample 3.6also mapsΦAto itself.
In other words, we can writeHΦ:Φ×I→Xas the homotopy of pairsH: (Φ,ΦA)×I→
(X,A).
Next we must show that fA satisfies (C1) and (C2) forΦA. The restriction HΦA=
H|ΦA×Iprovides the necessary homotopy from fAto the inclusioni|A, proving (C1). To
see (C2), observe that fAhas only one essential fixed point classF=F1∩A. By choosing the pathα:I→Zto be a constant path at any point inF, we see that fAsatisfies (C2) for ΦA.
Finally, to check that f satisfies (C2), observe that both essential classesF1 andF2 intersectZ. ForF1, choose the pathα:I→Zto be the constant path at the origin. As the origin lies in bothZandΦ, the pathαfulfills the requirements of (C2). Similarly forF2, we can chooseα:I→Zto be the constant path at the point (8, 0).
Thus f satisfies all the hypotheses ofTheorem 5.3, implying that for every closed sub-setΓofΦthat has nonempty intersection withΦAand with both components ofΦ∩Z, there exists a mapgA f with Fixg=Γ. In particular, there exists a map homotopic to f via a homotopy of pairs whose fixed point set isΦitself.
Acknowledgment
I would like to thank Jerzy Dydak of the University of Tennessee, who provided the proof ofTheorem 2.2.
References
[1] R. F. Brown,The Lefschetz Fixed Point Theorem, Scott, Foresman, Illinois, 1971.
[2] A. Dold,Lectures on Algebraic Topology, Die Grundlehren der mathematischen Wissenschaften, vol. 200, Springer, New York, 1972.
[3] J. Dydak, private communication, 2003.
[5] J. Jezierski,A modification of the relative Nielsen number of H. Schirmer, Topology and Its Appli-cations62(1995), no. 1, 45–63.
[6] B. J. Jiang,On the least number of fixed points, American Journal of Mathematics102(1980), no. 4, 749–763.
[7] ,Lectures on Nielsen Fixed Point Theory, Contemporary Mathematics, vol. 14, American Mathematical Society, Rhode Island, 1983.
[8] C. W. Ng,Fixed point sets of maps of pairs, Ph.D. thesis, University of California at Los Angeles, California, 1995.
[9] H. Schirmer,A relative Nielsen number, Pacific Journal of Mathematics122(1986), no. 2, 459– 473.
[10] ,Fixed point sets in a prescribed homotopy class, Topology and Its Applications37(1990), no. 2, 153–162.
[11] ,A survey of relative Nielsen fixed point theory, Nielsen Theory and Dynamical Systems (South Hadley, MA, 1992), Contemp. Math., vol. 152, American Mathematical Society, Rhode Island, 1993, pp. 291–309.
[12] P. Strantzalos,Eine charakterisierung der fixpunktmengen bei selbstabbildungen kompakter man-nigfaltigkeiten aus einer homotopieklasse, Bulletin de l’Acad´emie Polonaise des Sciences. S´erie des Sciences Math´ematiques, Astronomiques et Physiques25(1977), no. 8, 787–793.
[13] X. Z. Zhao,Estimation of the number of fixed points on the complement, Topology and Its Appli-cations37(1990), no. 3, 257–265.
Christina L. Soderlund: Department of Mathematics, California Lutheran University, 60 West Olsen Road 3750, Thousand Oaks, CA 91360-2700, USA