R E S E A R C H
Open Access
Strict global minimizers and higher-order
generalized strong invexity in multiobjective
optimization
Guneet Bhatia
1*and Rishi Rajan Sahay
2*Correspondence:
1Department of Mathematics,
University of Delhi, Delhi, 110007, India
Full list of author information is available at the end of the article
Abstract
Higher-order strict minimizers with respect to a nonlinear function for a multiobjective optimization problem are introduced and are characterized via sufficient optimality conditions and higher-order mixed saddle points of a vector-valued partial Lagrangian. To this aim, we present certain generalizations of higher-order strong invexity. A mixed dual is proposed and corresponding duality results are obtained. An equivalent optimization problem for the given multiobjective optimization problem is introduced. It is shown that the problem of finding
higher-order strict minimizers with respect to a nonlinear function for the given problem reduces to that of finding strict minimizers in the ordinary sense for an equivalent problem.
MSC: 26A51; 90C29; 90C46
Keywords: higher-order strong invexity; strict minimizer of orderm; partial Lagrangian; mixed saddle point
1 Introduction
Multiobjective optimization problems occupy an important place in the theory of op-timization. Several solution concepts for multiobjective optimization problem have ap-peared in the literatureviz.efficiency, weak efficiency and proper efficiency [, ]. The concept of higher-order local minimizer plays an important role in the convergence anal-ysis of iterative numerical methods [] and in stability results []. For a scalar optimization problem, Auslender [] derived necessary and sufficient optimality conditions for isolated local minima of order and , and Ward [] presented the notion of strict local minimum of orderm. Jimenez [] extended the idea of Ward [] to define the notion of a strict local efficient solution of ordermfor a vector minimization problem. Bhatia [] extended the notion of Ward to define the higher-order global strict minimizer for a multiobjective op-timization problem. Sahay and Bhatia [] introduced the notion of a strict minimizer of ordermwith respect to a nonlinear function for a scalar optimization problem.
In this paper, we move a step ahead in this direction and introduce the concept of a higher-order strict minimizer with respect to a nonlinear function for a multiobjective optimization problem. For the purpose of studying this new solution concept, we present certain generalizations of higher-order strong invexity []. Sufficient optimality conditions characterizing this solution concept are obtained. A mixed dual is proposed and well-known duality results are established. A partial vector-valued Lagrangian for the
objective optimization problem is introduced. Higher-order mixed saddle points for the partial Lagrangian with respect to a nonlinear function are shown to be equivalent to the higher-order strict minimizers with respect to the same function. Further, an equivalent optimization problem that enables one to find the higher-order strict minimizers for a given multiobjective optimization problem in a simpler manner is presented.
2 Higher-order global strict minimizers
In this paper, we study the following multiobjective optimization problem:
(MOP) minimizef(x) =f(x), . . . ,fp(x)
subject togj(x)≤, j= , , . . . ,q,
wherefi,gj:X→R,i= , , . . . ,p,j= , , . . . ,qare real-valued differentiable functions and Xis a non-empty open subset ofRnendowed with the Euclidean norm · .
We denote by S={x∈X:gj(x)≤,j= , , . . . ,q} the set of all feasible solutions for (MOP) and letI(x) ={j:gj(x) = }be the set of indices corresponding to active constraints. LetB(x,ε) ={x∈Rn:x–x<ε}denote an open ball with centrexand radiusε.
Definition .([]) A pointx∈Sis a strict local minimizer for (MOP) if there exists an
ε> such that
f(x)≮fx for allx∈Bx,ε∩S,
that is, there exists nox∈B(x,ε)∩Ssuch that
f(x) <fx.
Definition .([]) Letm≥ be an integer. A pointx∈Sis a local strict minimizer of
ordermfor (MOP) if there exists anε> and a constantc∈intRp+such that
f(x)≮fx+cx–xm for allx∈Bx,ε∩S.
The notion of a local strict minimizer reduces to the global sense if the ball B(x,ε) is replaced by the whole spaceRn.
The following example illustrates that in some casesxmay fail to be a strict minimizer
in the sense of the above definition.
Example . LetS= [, ] andf(x) = (x,sinx), thenx= is not a strict minimizer of
order in the sense of Definition ., since for anyc= (c,c)∈intR+, there exists anx
satisfying <x<c/ , <sinxx<csuch thatf(x) <f(x) +cx–x.
Definition . Letm≥ be an integer. A pointx∈Sis a local strict minimizer of order
mfor (MOP) with respect to a nonlinear functionψ:S×S→Rn, if there exists anε> and a constantc∈intRp+such that
f(x)≮fx+cψx,xm for allx∈Bx,ε∩S.
Definition . Letm≥ be an integer. A pointx∈Sis a strict minimizer of orderm
for (MOP) with respect to a nonlinear functionψ:S×S→Rnif there exists a constant c∈intRp+such that
f(x)≮fx+cψx,xm for allx∈S.
Remark . The functionψ plays an important role in the notion of a strict minimizer defined above. For the problem considered in Example .,x= failed to be a strict
min-imizer of order in the usual sense; however, it is important to observe here thatx= is
a strict minimizer of order with respect toψ(x,x) =sinx–sinxforc= (, ).
Remark . The study of higher-order minimizers is pertinent as these minimizers play an important role in the convergence analysis of iterative numerical methods and in sta-bility results. These minimizers are often exactly those satisfying anmth derivative test [, ]. It is clear that any strict minimizer of ordermis also a strict minimizer for (MOP). Converse of this statement may not be true. Ifxis a strict minimizer of ordermwith
respect to a nonlinear functionψ, then it is also a strict minimizer of orderjwith respect to the sameψfor allj>m.
We recall that [] a setS⊆Rnis invex with respect toηif there existsη:S×S→Rn such that for allx,y∈Sand allλ∈[, ],y+λη(x,y)∈S. Throughout this paper, we assume S⊆Xto be an invex set.
Definition . ([]) A differentiable functionf :X→Ris said to be strongly invex of order m≥ with respect to η,ψ onSif there exists a constantc> such that for all x,y∈S,
f(x) –f(y)≥ ∇f(y)tη(x,y) +cψ(x,y)m.
Ifψ(x,y) = , then the above definition reduces to the notion of invexity. Ifψ(x,y) =x–y, η(x,y) =x–y, the definition reduces to the definition of strong convexity of orderm[].
Remark . It is important to observe that there exist functions which are strongly invex of ordermbut are not strongly convex of any order. For example, letX=R,S={(x
,x)∈
R: ≤x
,x≤},f(x) =x+x,η(x,y) = (–y, –y) andψ(x,y) = (x/√ +y, ), where
x= (x,x)tandy= (y,y)t. Then, for allx,y∈Sandλ∈[, ], we havey+λη(x,y) = (y( –
λ),y( –λ))∈S, thusSis an invex set with respect toη. Clearly,f is strongly invex of
Remark . Every strongly invex function of ordermwith respect toηandψ is invex. However, converse of this statement may not be true [].
We now present the following generalizations of higher-order strong invexity.
Definition . A differentiable functionf :X→Ris said to be strongly pseudoinvex type I of ordermwith respect toη,ψonSif there exists a constantc> such that for allx,y∈S,
∇f(y)tη(x,y)≥ implies f(x)≥f(y) +cψ(x,y)m,
or equivalently,f(x) <f(y) +cψ(x,y)mimplies∇f(y)tη(x,y) < .
Remark . Strong invexity of order mwith respect to ηandψ implies strong pseu-doinvexity type I of ordermwith respect to the sameηandψ. However, converse is not true in general. For example, letX=R,S= (,π/],f(x) = +cosx,η(x,y) =(cossiny–cosy x)and ψ(x,y) =cosx–cosy, then forc= /m–,f is strongly pseudoinvex type I of orderm≥
with respect toηandψonSbut is not strongly invex of any ordermwith respect to these ηandψ.
Definition . A differentiable functionf :X→Ris said to be strongly pseudoinvex type II of ordermwith respect toη,ψonSif there exists a constantc> such that for allx,y∈S,
∇f(y)tη(x,y) +cψ(x,y)m≥ implies f(x)≥f(y).
Definition . A differentiable functionf :X→Ris said to be strongly quasiinvex type I of ordermwith respect toη,ψonSif there exists a constantc> such that for allx,y∈S,
f(x)≤f(y) implies ∇f(y)tη(x,y) +cψ(x,y)m≤.
Definition . A differentiable functionf :X→Ris said to be strongly quasiinvex type II of ordermwith respect toη,ψonSif there exists a constantc> such that for allx,y∈S,
f(x)≤f(y) +cψ(x,y)m implies ∇f(y)tη(x,y)≤.
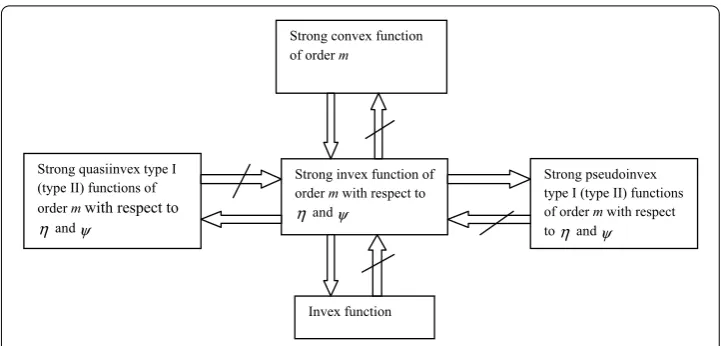
The relations between these classes of functions and some related classes are summa-rized in Figure (note: it is important to observe that there is no relation between type II functions and corresponding notions of type I functions presented in Figure ).
3 Local-global property and optimality conditions
Theorem . Suppose x∈S is a strict local minimizer of order m with respect toψ for
(MOP)and the functions fi:X→R,i= , , . . . ,p are strongly pseudoinvex type I of order m with respect to the sameηandψ on S.Then xis a strict minimizer of order m with
respect to the sameψfor(MOP).
Proof Sincex∈Sis a local strict minimizer of ordermwith respect toψ for (MOP),
therefore there exists anε> and a constantc= (c, . . . ,cp)∈intRp+such that
Figure 1 Relations between newly defined classes and some well-known classes.
Let us suppose thatxis not a strict minimizer of ordermwith respect toψfor (MOP),
then for allci> ,i= , , . . . ,p, there exists somez∈Ssuch that
fi(z) <fix+ciψz,x, i= , , . . . ,p.
Forx∈Sand sufficiently smallλ∈(, ) andη:S×S→Rn, we havex+λη(z,x)∈
B(x,ε)∩S.
Asfi,i= , , . . . ,pare strongly pseudoinvex type I of ordermonSwith respect toηand ψ forz,x∈S, it follows from the set of above inequalities that
∇fixtηz,x< , i= , , . . . ,p.
Thus, there exists σ> such that for <λ≤σ, fi(x+λη(z,x)) <fi(x), i= , , . . . ,p, which implies that for allci> ,i= , , . . . ,pand for every nonlinear functionψ, we have
fi
x+ληz,x<fi
x+ciψ
x+ληz,x,xm, i= , , . . . ,p; <λ≤σ.
This contradicts (.).
Theorem .(Fritz John type necessary optimality conditions) Suppose xis a strict
min-imizer of order m with respect to a nonlinear functionψ:S×S→Rnfor(MOP)and the functions fi,i= , , . . . ,p,gj,j= , , . . . ,q are differentiable at x.Then there existsλ
i ≥, i= , , . . . ,p,μ
j ≥,j= , , . . . ,q such that
p
i=
λi∇fix+ q
j=
μj∇gjx= ,
μjgjx= , j= , , . . . ,q,
λ,μ= .
Definition . (MOP) is said to satisfy Slater’s constraint qualification (SCQ) atxif there
Theorem .(Karush-Kuhn-Tucker type necessary optimality conditions) Suppose x
is a strict minimizer of order m with respect to a nonlinear functionψ :S×S→Rnfor (MOP)and the functions fi,i= , , . . . ,p,gj,j= , , . . . ,q are differentiable at x.Assume that(SCQ)holds at x,then there existλi ≥,i= , , . . . ,p,μj ≥,j= , , . . . ,q such that
p
i=
λi∇fix+ q
j=
μj∇gjx= , (.)
μjgj
x= , j= , , . . . ,q, (.)
λt·e= , where e= (, . . . , )∈Rp. (.)
Theorem .(Sufficient optimality conditions) Let the conditions(.)-(.)be satisfied at x∈S.Suppose f
i,i= , , . . . ,p are strongly pseudoinvex type I of order m and gj,j∈I(x) are strongly quasiinvex type I of order m with respect to the sameηandψon S.Then xis
a strict minimizer of order m with respect toψfor(MOP).
Proof On the contrary, suppose thatx∈Sis not a strict minimizer of ordermwith
re-spect toψfor (MOP). Then, for¯ci> ,i= , , . . . ,p, there exists somex¯∈Ssuch that
fi(x¯) <fix+¯ciψx¯,xm, i= , , . . . ,p. (.)
Asfi,i= , , . . . ,pare strongly pseudoinvex type I of ordermwith respect toηandψon S, therefore, from (.), we have
∇fixtηx¯,x< , i= , , . . . ,p.
Asλi ≥,i= , , . . . ,p, andλt·e= , the above system of inequalities reduces to
p
i=
λi∇fi
xtηx¯,x< . (.)
Now, forx¯∈S,gj(x¯)≤gj(x),j∈I(x). Asgj,j∈I(x), is strongly quasiinvex type I of order
mwith respect to the sameηandψonS, it follows that there exist constantsβj> ,j∈I(x) such that
∇gjxtηx¯,x+βjψx¯,xm≤.
Further, sinceμj ≥,j∈I(x), it follows from the above relation that
j∈I(x) μj∇gj
xtηx¯,x+ j∈I(x)
μjβjψ
¯
x,xm≤.
Asμj = , forj∈/I(x), we have
q
j=
μj∇gjxtηx¯,x+ q
j=
μjβjψ
¯
Adding (.) and (.), we obtain
ηtx¯,x
p
i=
λi∇fix+ q
j=
μj∇gjx
+ q
j=
μjβjψ
¯
x,xm< .
On using (.), we haveqj=μjβjψ(x¯,x)m< , which is not possible.
Remark . The result of the above theorem also holds under the conditions thatfi,i= , , . . . ,pare strongly invex of ordermwith respect to the sameηandψ andgj,j∈I(x) are strongly quasiinvex type II of ordermwith respect to the sameηandψ onS.
4 Duality
In this section, we develop duality relationship between (MOP) and its mixed dual (MD) under the assumption of generalized strong invexity of ordermwith respect to a nonlinear function.
Let the index setQ={, , . . . ,q}be partitioned into two disjoint subsetsJandK such thatQ=J∪K. The mixed dual for (MOP) is given by
(MD) maximizef(u) +μJgJ(u)e
subject to p
i=
λi∇fi(u) + q
j=
μj∇gj(u) = , (.)
μjgj(u)≥, j∈K, (.)
λi≥, i= , , . . . ,p, λt·e= , e= (, . . . , )∈Rp,
μj≥, j= , , . . . ,q.
(.)
Theorem .(Weak duality) Let x and(u,λ,μ)be feasible for(MOP)and(MD) respec-tively.Suppose fi+μJgJ,i= , , . . . ,p are strongly pseudoinvex type I of order m andμjgj, j∈K is strongly quasiinvex type II of order m with respect to the sameηandψ,then there exists c∈intRp+such that
f(x)≮f(u) +μJgJ(u)e+cψ(x,u)m.
Proof Suppose on the contrary, for everyc∈intRp+, we have
f(x) <f(u) +μJgJ(u)e+cψ(x,u) m
or
fi(x) <fi(u) +μJgJ(u) +ciψ(x,u) m
, i= , , . . . ,p.
Sincexis feasible for (MOP) andμj≥, therefore fori= , , . . . ,p, we have
fi(x) +μJgJ(x) <fi(u) +μJgJ(u) +ciψ(x,u) m
Using strong pseudoinvexity type I of ordermforfi+μJgJ,i= , , . . . ,p, with respect toη andψ, we have
ηt(x,u) ∇fi(u) + j∈J
μj∇gj(u)
< , i= , , . . . ,p.
The above set of inequalities along withλi≥,i= , , . . . ,pand (.) yields
ηt(x,u)
p
i=
λi∇fi(u) +
j∈J
μj∇gj(u)
< . (.)
Now, forx∈S,gj(x)≤, and sinceμj≥, we haveμjgj(x)≤,j∈K. Moreover, (u,λ,μ) is feasible for (MD), therefore
μjgj(x)≤μjgj(u), j∈K
or
μjgj(x)≤μjgj(u) +βjψ(x,u)m forβj> ,j∈K.
Sinceμjgj,j∈Kis strongly quasiinvex type II of ordermwith respect toηandψ, therefore
ηt(x,u)μj∇gj(u)≤, j∈K,
which further implies that
ηt(x,u) j∈K
μj∇gj(u)≤. (.)
Adding (.) and (.), we have
ηt(x,u)
p
i=
λi∇fi(u) + q
j=
μj∇gj(u)
< .
This contradicts (.).
Theorem .(Strong duality) Suppose x is a strict minimizer of order m with respect
to a nonlinear functionψ:S×S→Rnfor(MOP).Assume that(SCQ)holds at x,then there existλi ≥,i= , , . . . ,p andμj ≥,j= , , . . . ,q such that(x,λ,μ)is feasible for
(MD).Further,if the conditions of Theorem.hold,then(x,λ,μ)is a strict maximizer
of order m for(MD).
Proof The proof follows from Theorem . and Theorem ..
5 Partial vector Lagrangian and mixed saddle point
optimization theory, several researchers [, , ] have obtained the equivalence between the saddle point and optimal solutions of an optimization problem under various con-ditions on the functions involved. In this section, we define higher-order mixed saddle points with respect to a nonlinear functionψ:S×S→Rnfor a partial vector-valued La-grangian of a multiobjective optimization problem. The equivalence of these saddle points and the higher-order strict minimizers with respect to the same functionψfor (MOP) is established under generalized higher-order strong invexity conditions on the functions involved.
LetQ={, , . . . ,q},J⊆QandJ=Q\J,|J|denote the cardinality of index setJ.
Definition . Vector-valued partial Lagrangian functionL:S×R|+J|→Rpfor (MOP) is
defined as
L(x,μJ) =
L(x,μJ), . . . ,Lp(x,μJ)
,
whereLi(x,μJ) =fi(x) +
j∈Jμjgj(x),i= , , . . . ,p,x∈S,μJ∈R|+J|.
We now introduce the notion of mixed saddle points of ordermwith respect to a non-linear function for (MOP) as follows.
Definition . A vector (x,μ
J)∈S×R
|J|
+ is said to be a mixed saddle point of order
mwith respect to a nonlinear functionψ for the partial vector-valued LagrangianLfor (MOP) if there existsc∈intRp+such that
Lx,μJ≮Lx,μJ for allμJ∈R|+J|, (.)
Lx,μJ≮Lx,μJ+cψx,xm for allx∈S. (.)
Theorem . Suppose that xis a strict minimizer of order m with respect to a nonlinear
functionψ for(MOP)and(SCQ)holds at x.Further,if f
i+
j∈Jμjgj,i= , , . . . ,p are strongly pseudoinvex type I of order m andμjgj,j∈Jis strongly quasiinvex type I of order
m with respect toηandψon S,then(x,μ
J)is a mixed saddle point of order m with respect toψfor the partial Lagrangian.
Proof Supposexis a strict minimizer of ordermwith respect toψ for (MOP) and the
constraint qualification holds atx. Therefore, by Theorem ., there existλ
i ≥,i= , , . . . ,pandμj ≥,j= , , . . . ,qsuch that conditions (.)-(.) hold atx.
On the contrary, suppose that (x,μ
J) is not a mixed saddle point of any order for the partial vector Lagrangian functionLfor (MOP). Then, for allc∈intRp+, there exists some ¯
x∈Ssuch that
Lx¯,μJ<Lx,μJ+cψx¯,xm,
that is,
or
fi(x¯) + j∈J
μjgj(x¯) <fix+ j∈J
μjgjx+ciψx¯,xm, i= , , . . . ,p.
Sincefi+j∈Jμjgj,i= , , . . . ,pare strongly pseudoinvex type I of ordermwith respect toηandψ, it follows from the above inequalities that
ηtx¯,x ∇fix+ j∈J
μj∇gjx< , i= , , . . . ,p. (.)
Now, forx¯∈Sandμj ≥,j∈J, it follows thatμjgj(x¯)≤. On using (.), we have
μjgj(x¯)≤μjgj
x, j∈J.
Sinceμjgj,j∈Jis strongly quasiinvex type I of ordermonSwith respect toηandψ,
there exist constantsβj> ,j∈Jsuch that
ηtx¯,xμj∇gjx+βjψ
¯
x,xm≤, j∈J.
Asβj> ,it follows that
ηtx¯,x j∈J
μj∇gjx≤. (.)
Adding (.) and (.) and usingλi ≥,i= , , . . . ,p,λt·e= , we obtain
ηtx¯,x
p
i=
λi∇fix+ q
j=
μj∇gjx
< ,
which contradicts (.). Therefore,
Lx¯,μJ≮Lx,μJ+cψx¯,xm.
Again, since (.) holds andx∈S, we have
fix+ j∈J
μjgjx≤fix+ j∈J
μjgjx.
This impliesL(x,μ
J)≮L(x,μJ).
Thus, (x,μJ) is a mixed saddle point of ordermwith respect to a nonlinear function
ψ for the partial vector Lagrangian.
Theorem . If(x,μ
J)is a mixed saddle point of order m with respect to a nonlinear functionψ for the partial vector Lagrangian,then xis a strict minimizer of order m with
Proof From the hypothesisL(x,μ
J)≮L(x,μJ), we have
j∈J
μj –μj
gjx≮.
Takingμj= ,j∈Jin the above inequality, we obtain
j∈J μjgj
x≥.
Forx∈Sand the fact thatμ
J∈R
|J|
+ , we have
j∈J
μjgjx≤.
From above two inequalities, we have
j∈J
μjgjx= . (.)
Contrary to the result of the theorem, assume thatxis not a strict minimizer of orderm with respect toψfor (MOP). Then, for everyc∈intRp+, there exists anx¯∈Ssuch that
f(x¯) <fx+cψx¯,xm. (.)
For anyμ
J∈R
|J|
+ andx¯∈S, we haveμJgJ(x¯)≤. Now,
Lx¯,μJ–cψx¯,xm=f(x¯) +μJgJ(x¯) –cψx¯,xm
<fx+ j∈J
μjgj
x (using (.) and (.))
=Lx,μJ.
Therefore,L(x¯,μJ) –cψ(x¯,x)m<L(x,μ
J), which contradicts (.).
6 An equivalent vector optimization problem
In this section, we introduce an equivalent vector optimization problem (EVP) corre-sponding to (MOP) and prove that the problem of finding strict minimizers of orderm with respect to a nonlinear functionψ :S×S→Rn for (MOP) reduces simply to the problem of finding strict minimizers for (EVP).
Letxbe any given feasible solution in (MOP). We consider the following equivalent
vector optimization problem (EVP) given by
minimizef
x+∇f
xηx,x, . . . ,fp
x+∇fp
xηx,x
wherefi,i= , , . . . ,pandgj,j= , , . . . ,qare defined as in (MOP).η:S×S→Rnsatisfies AssumptionC[].
LetD(x) ={x∈X:gj(x) +∇gj(x)η(x,x)≤,j= , , . . . ,q}denote the set of all feasible
solutions of (EVP).
Theorem . Let xbe a strict minimizer of order m with respect to a nonlinear function
ψ:S×S→Rnfor(MOP).Assume that Slater’s constraint qualification(SCQ)holds at x,
then xis a strict minimizer in the equivalent vector optimization problem(EVP).
Proof Assumexis a strict minimizer of ordermwith respect to a nonlinear function ψ :S×S→Rn for (MOP) and (SCQ) is satisfied atx; therefore, necessary optimality conditions (.)-(.) hold. Supposexis not a strict minimizer in (EVP). Then there exists
¯
xfeasible for (EVP) such that fori= , , . . . ,p,
fix+∇fixηx¯,x<fix+∇fixηx,x. (.)
Sinceηsatisfies AssumptionC, thereforeη(x,x) = forx∈S, the above set of
inequal-ities reduces to
∇fixηx¯,x< , i= , , . . . ,p.
Usingλ
i ≥,i= , , . . . ,p, we have
p
i=
λi∇fixηx¯,x< . (.)
Sinceμj≥,j= , , . . . ,q, therefore forx¯∈D(x), it follows that
μjgj
x+μj∇gj
xηx¯,x≤, j= , , . . . ,q.
Using (.), we have
q
j=
μj∇gjxηx¯,x≤. (.)
Adding (.) and (.), we get a contradiction to (.).
Theorem . Let xbe a strict minimizer in the equivalent vector optimization problem (EVP).Further assume that fi,i= , , . . . ,p are strongly pseudoinvex type I of order m and gj,j= , , . . . ,q are strongly invex of order m with respect to the sameηandψ,then xis a strict minimizer of order m in the original vector optimization problem(MOP).
Proof Clearly,xis feasible for (MOP). First, we will show that any feasible point in (MOP) is also a feasible point in (EVP), that is, we will show that S⊆D(x). Letx∈S andgj, j= , , . . . ,qbe strongly invex of ordermwith respect toηandψ onX. Therefore, for somekj> ,j= , , . . . ,q, we have
Asx∈Sandkj> ,j= , , . . . ,q, the above inequalities lead to
≥gj
x+∇gj
xηx,x, j= , , . . . ,q,
that is,x∈D(x). Hence,S⊆D(x).
Now, suppose thatxis not a strict minimizer of ordermin (MOP). Then, forβ
i> , i= , , . . . ,p, there exists somex¯∈Ssuch that
fi(x¯) <fi(x) +βiψ(x¯,x) m
, i= , , . . . ,p. (.)
Sincefi,i= , , . . . ,pare strongly pseudoinvex type I of ordermwith respect toηandψ onS, we have
∇fi
xtηx¯,x< , i= , , . . . ,p.
Sinceη(x,x) = , we can rewrite the above set of inequalities as
fix+∇fixηx¯,x<fix+∇fixηx,x, i= , , . . . ,p, (.)
which contradicts thatxis a strict minimizer for (EVP).
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Author details
1Department of Mathematics, University of Delhi, Delhi, 110007, India.2Department of Operational Research, University
of Delhi, Delhi, 110007, India.
Acknowledgements
The authors would like to thank Prof. Davinder Bhatia (Retd.) and Dr. Pankaj Gupta, Department of Operational Research, University of Delhi, for their keen interest and continuous help throughout the preparation of this article.
Received: 19 April 2012 Accepted: 6 January 2013 Published: 24 January 2013
References
1. Weir, T, Mond, B: Pre-invex functions in multiple objective optimization. J. Math. Anal. Appl.136, 29-38 (1988) 2. Sawaragi, Y, Nakayama, H, Tanino, T: Theory of Multiobjective Optimization. Academic Press, Orlando (1985) 3. Cromme, L: Strong uniqueness: a far reaching criterion for the convergence of iterative procedures. Numer. Math.29,
179-193 (1978)
4. Studniarski, M: Sufficient conditions for the stability of local minimum points in nonsmooth optimization. Optimization20, 27-35 (1989)
5. Auslender, A: Stability in mathematical programming with non-differentiable data. SIAM J. Control Optim.22, 239-254 (1984)
6. Ward, DE: Characterization of strict local minima and necessary conditions for weak sharp minima. J. Optim. Theory Appl.80, 551-571 (1994)
7. Jimenez, B: Strict efficiency in vector optimization. J. Math. Anal. Appl.265, 264-284 (2002)
8. Bhatia, G: Optimality and mixed saddle point criteria in multiobjective optimization. J. Math. Anal. Appl.342(1), 135-145 (2008)
9. Sahay, RR, Bhatia, G: Characterizations for the set of higher order global strict minimizers. J. Nonlinear Convex Anal. (to appear)
10. Lin, GH, Fukushima, M: Some exact penalty results for non-linear programs and mathematical programs with equilibrium constraints. J. Optim. Theory Appl.118, 67-80 (2003)
11. Mangasarian, OL: Nonlinear Programming. Classical Appl. Math., vol. 10. SIAM, Philadelphia (1994) (corrected reprint of the 1969 original)
doi:10.1186/1029-242X-2013-31