Mobile Software Agents for Wireless Network
Mapping and Dynamic Routing
Hamzeh Khazaei
Department of Computer ScienceUniversity of Manitoba Winnipeg, MB, Canada R3T 2N2 Email: [email protected]
Jelena Miˇsi´c
Department of Computer Science Ryerson University Toronto, ON, Canada M5B 2K3
Email: [email protected]
Vojislav B. Miˇsi´c
Department of Computer ScienceRyerson University Toronto, ON, Canada M5B 2K3
Email: [email protected]
Abstract—Mapping and dynamic routing in a wireless network are essential and basic operations that are the prerequisites for all higher order interactions between nodes on that network. The Intent of network mapping by multi mobile software agents is to obtain the topology of network in a distributed manner. In this paper we examine how software agents can wander in an unknown Ad hoc network with cooperation to report the topology of the network. We present results from a simulation of such a system and discuss the relationship between the overall efficiency of the system and diversity of the agent types, agent population, agent memory, inter-agent communication styles. In dynamic network routing, mobile agents are responsible for updating the routing table of nodes for a multi-hop communication purpose. The dynamic nature of the topology of the Ad hoc networks is due to mobility of some nodes in the network: wireless links are broken and reformed frequently. In this paper we present a dynamic, wireless, peer to peer network with routing tasks performed in a decentralized and distributed fashion by mobile software agents that cooperate to accumulate and distribute network connectivity information. We also examine different types of agents, stigmergic versus non stigmergic having identical overheads to study the outcome connectivity in a dynamic wireless network. Keywords: Wireless Ad hoc Networks, Network Mapping, Network Routing, Multi-agent Systems, Stigmergy
I. INTRODUCTION
Computer networks continue to grow in scale, diversity, scope and complexity. Wireless networks, in particular, have become an essential part of the network’s world. A vast variety of nodes could be participating in ad hoc wireless networks: portable computers, PDAs, sensors, cellular phones, pagers, to name just a few. Some of these nodes are mobile, some require multi-hop communication, some suffer from power source limitation others may have computational or communication constraints; finally a small subset of them are connected to outside world like Internet or LAN. In this paper we considered two scenarios: 1) network mapping for a wireless networks with stationary nodes, 2) dynamic network routing for a dynamic network; where nodes may have some degree of node-to-node movement. The knowledge of the topology of a wireless network is a prerequisite for all higher-order interactions between nodes on that network. In current systems, routing maps are usually generated in a centralized, and often human-mediated, manner. The software
Mobile-agent approach, in contrast, is highly distributed and decentralized with agents spread across the network working together to accumulate connectivity information [1]. In this approach mobile agents wander around the network, gather topology information and carry this information with them while moving and exploring the network. Mobile agents that land on a node can share their information about network so an individual agent can acquire knowledge about parts of the network that have never visited. N. Minar et al [1] apply three different types of agent algorithms to a mapping task on a static network and compared their effectiveness. They founded that agent cooperation greatly improved system performance. They study the effectiveness of agent diversity on performance and concluded that the efficient division of labor in the absence of centralized control has a subtle, important effect on the net-work problem. They set up the netnet-work as a group of stationary wireless network having reliable bi-directional links between them. The authors of [2] also examined mobile software agents in a network having dynamic routing. This network, a wireless ad hoc one, contains a variety of wireless nodes, each having a different capability, computability, connectivity and mobility. Due to the mobility of some of nodes, the topology of the network is quite dynamic and wireless links are broken and reformed frequently. Every node also has a wireless range; all of the other nodes located in such range are the neighbour of this node. A small subset of nodes is gateways that have a high computability and connectivity capability. They are connected to the outside world such as the Internet or a local area network. Every node has to have at least one valid path to one of the stationary gateways in order to be connected to the outside world. They set up a network with half of nodes being stationary and the rest being mobile with a fixed velocity. Therefore links between nodes are bidirectional and the topology of the network can be considered as an undirected graph. They examined the behaviour of different types of agents having different population and history sizes on the network. They compared and discussed the results based on various parameter settings. Mobile agents, in either scenario, are programs that move themselves from node to node: the computation moves, not just the attendant data. The authors defined their mobile agents having four important properties [2]: first, agents encapsulate a thread of execution along with
a bundle of code and data. Second, any agents can move across the network easily. Third, due to cost of transformation agent should be small in size. And finally an agent is able to cooperate with other agents in order to perform complex or dynamic task. In this paper we change the network properties in that manner to be more realistic. Then the agents of Nelson Minar et al are transformed to our environment and their performance is compared with ours. We also employ stigmergic communication and direct communication in our agents that permit them to work more cooperatively and efficiency in the network. The employment of communication imposes negligible overhead on the system complexity. The rest of this report is organized as follows: in section one we deal with network mapping scenario, our environment and agents will be described; we explain our experiment model, the simulation results, and Final discussion. In section two, similarly, we describe the new environment and our agents characteristics for dynamic routing. The experiment model and the simulation results will be discussed. At the end we will wrap up with the conclusion and future works. We will survey related works wherever is needed and related to our work
II. WIRELESSNETWORKMAPPING
A. Network Descriptions, Environment
Here we have a set of wireless nodes which is distributed in a physical domain. Every node has a radio range. There is a link between two nodes if two nodes can see one another, that is if they are located in the radio range of each other. All nodes are fixed in location so the topology of the network is static during the life time. Due to the assumption that nodes have the same range for radio range, links are bidirectional in [1]. Authors have also assumed that radio range will stay fixed during the experiments. We eliminate these non-realistic assumptions in our environment. First, the radio range of nodes is not always the same, so there might exist a link from node A to node B but not vice versa. We also consider that there will be some degradation on a percentage of radio links due to rely on battery power for some nodes. Such changes result in a directed graph for the network topology and a quite dynamic nature during network life time. So the topology knowledge of the network become invalid after awhile, such that we need to fire up the agents again to capture the changes in the network since the last topology measurement.
B. Agents
Nelson Minar et al examined three different types of agents which roam in the network differently. As a baseline they examined random agents, which simply move to a random adjacent node every update. Conscientious agents are more sophisticated, choosing at each time step to move to an adjacent node that they have never visited or have visited least recently. This algorithm is similar to a depth-first search of the network. Conscientious agents base their movement decisions only on first-hand knowledge, ignoring information learned from other agents when determining where to go. In contrast the third type of agents, super-conscientious agents,
also moves preferentially to nodes that have not been explored, but they use both their own experience and learned data from their peers in deciding which nodes to move to [1]. Agents can visit each other when they land on the same node. This visit can be considered as a direct communication or direct learning from others. They get information about the network topology form others and keep them separately as second-hand information. First-hand information is those which obtained by agent itself. Random agents use no information for wandering, conscientious one use just first-hand and super-conscientious agent use both first and second hand information for moving around network. Manal Abdullah et al [3] used a type of agent like our conscientious agent but their agent has about 5 times more overhead than ours. They also did not mentioned the network characteristics which used for simulation. We also employ another kind of communication which adds almost no extra cost in agents computational complexity. This form of implicit communication is referred to as stigmergy, a term used in biology to describe the influence that previous changes to the environment can have on an individuals current actions [4]. Stigmergy is a common control method in lower animals, especially social insects [5] . The main contribution of stigmergy has been in foraging and sorting domain; a given agent intentionally put some marks or clues on the environment, which are realizable by teammate, in order to help them to do their actions with less hardship or with higher reliability in light of agent’s mission. Stigmergy was first observed in nature: ants communicate to one another by laying down pheromones along their trails, so where ants go within and around their ant colony is a stigmergic system. Parunak, Sauter, et al, employ ant-inspired stigmergy in a soft-ware environment that uses synthetic pheromone to coordinate unmanned aircraft that use potential field-based navigation [6], [7]. A. Wurr and J. Anderson [8] , use real physical marking to let their agents avoid bottlenecks and local maxima. As a result, their agents more frequently discover an unknown goal and dont stuck in a limited area in the environment. At the same time, through stigmergic trail-making, their agents were able to greatly increase the frequency and ease with which they subsequently located a previously discovered goal. In this paper we use a kind of footprint concept; every agent leaves behind his footprint on the current node. Agents imprint their next target node in the current node. They do this so that subsequent agents avoid following previous one. In fact, here, agents try to not chase other agents intentionally. The intent is to not be followed by others as opposed to encourage others to come after you in the ant society. Such footprints help agents to be more distributed across network and explore the unvisited part of network rapidly no matter which algorithm they use for wandering.
1) Experimental Model: The results we present here are from a simulation of mobile agents living in a network of interconnected nodes that work cooperatively to build a map of the network. In simulation we assume nodes are distributed in a two dimension environment randomly; and that the nodes which located in other nodes radio ranges establish wireless
links between them. An average packet needs to multi-hop through sequence of nodes in order to get its destination. The goal of the agents is to map the network they are living in, to learn about the connectivity of the nodes and to build a model of the network topology. Our model is implemented with a simple discrete event, time-step based simulation engine. With each step of simulated time, an agent does four things: First, the agent learns about all of the edges off the node it is on. This information, which the agent itself has just experienced, is added to the agents store of first-hand knowledge. Second, the agent learns everything it can from all of the other agents currently on the current node. This information, learned from other agents is stored separately as second-hand knowledge. Third, the agent chooses a new node for its next move. Finally if stigmergic capability is used the agent leaves its footprint on the current node. We first implement Nelson Minar et al, experiments to confirm all their results and discussions on the new environment. We then compare their agents with our modified agents in terms of performance, complexity and overhead. Our simulation system consists of 2000 lines of Java code in 25 classes implementing a discrete event scheduler, a graphical view and plots, a data-collection system, and the simulated objects themselves: network nodes, network monitoring entity, wireless links, and mobile agents. In order to compare results across population sizes and algorithms, we chose a single connected network consisting of 300 nodes with 2164 edges for all experiments. We define finishing time on the simulation time step where all agents have a perfect knowledge about the network topology. Such definition of finishing time reflects the efficiency of a team of agents rather than that of an individual agent.
C. Simulation Results
All data is collected from 40 independent runs of each parameter setting with random initial agent placement. We compile our results following the example of [1] to better compare our results to theirs.
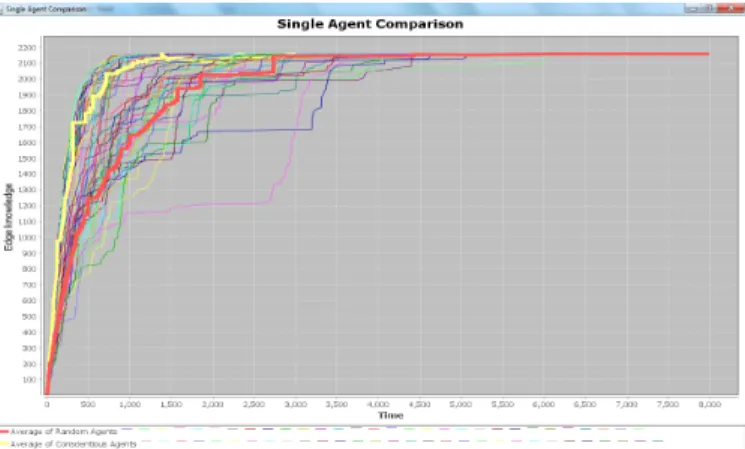
1) Single Agent: In this case, we inject just one agent and measure the finishing time for two different algorithms separately. With the single agent approach there is no chance of cooperation so the super-conscientious agent should give the same results as a conscientious agent. But even with single agents there is a chance that stigmergic capability will be beneficial, since in this context an agent avoids following itself. The stigmergic capability helps an agent to go through unexplored path using its footsteps in network. Figure 1 shows the performance of a single random and conscientious agent. Note that the conscientious agent did much better than the random agent. The conscientious agent finished mapping at 3000 simulation steps while the random agent finished the task with 8000 steps. For more discussion on the comparison, refer to [1]. Figure 2 shows the performance of our agents that use stigmergy for wandering in the network. Our agents clearly did the job efficiently and outperformed the corresponding agents described in [1]. The stigmergic conscientious agent finished the topology mapping in 2500 time steps and the stigmergic
Fig. 1. The comparison between random and conscientious agent, N. Minar agents.
Fig. 2. The comparison between random and conscientious agent, our agents.
random agent finished the mapping in 6600 time steps. Both of these agents outperformed the N. Minar agents. The key point is that our agent did not use its last path; it chose instead another one for wandering using the mark it left behind during its previous visit to the current node.
2) Effects of Cooperation: The single agent result is a good basis for measuring the effect of agent cooperation. In the case of multiple agents, there is a chance for visiting other agents to have direct communication. Such communication lets agents learn from each other. Therefore, agents may obtain some information about network topology for nodes that they never visited before. In cooperation though, our agents did much better than the N. Minar agents. Figure 3 shows the effect of cooperation for fifteen N. Minars agents. Fifteen cooperation conscientious agents perform the mapping in 140 steps. A marginal returns thus far. Our own agents perform the mapping in shorter time, in 125 steps, due to the fact, we assume, that they not only use the opportunity of getting second-half information from others but also try to avoid chasing each other. Figure 4 shows that the performance of our conscientious agents is roughly 10 percent faster than the N. Minar agents.
Fig. 3. Knowledge over time for 15 N. Minars conscientious agents.
Fig. 4. Knowledge over time for 15 our conscientious agents.
3) Super-conscientious agents: A surprising results: The third class of agents is super-conscientious: they use both first-hand and peer-obtained information to make movement decisions. At first glance, these agents should be the most successful of the three types. After all, the more information that is factored into a decision the better that decision should be. For a small population size, the super-conscientious agents are the best; for a moderate population size, they are the same as conscientious agents; and surprisingly for a large popula-tion size, conscientious agents outperform super-conscientious agents. The reason for this phenomenon may be that in large population there is higher chance that agents will visit, while in the case of super-conscientious agents, when two agents visit each other, they will become identical, so chances are that the next target node that they choose will be identical due to their using the same information for the moving decision. In contrast conscientious agents just use their own, first-hand, information for wandering in the network. Figure 5 plots the comparison between the N. Minars super-conscientious and conscientious agents. N. Minar et al. add randomness to the decision that the super-conscientious agents make in order to disperse their agents across the network. In the best case they make super-conscientious and conscientious agents identical in high population size runs. For more details, please see [1].
Fig. 5. Comparison between conscientious and super-conscientious agents, N. Minars agents.
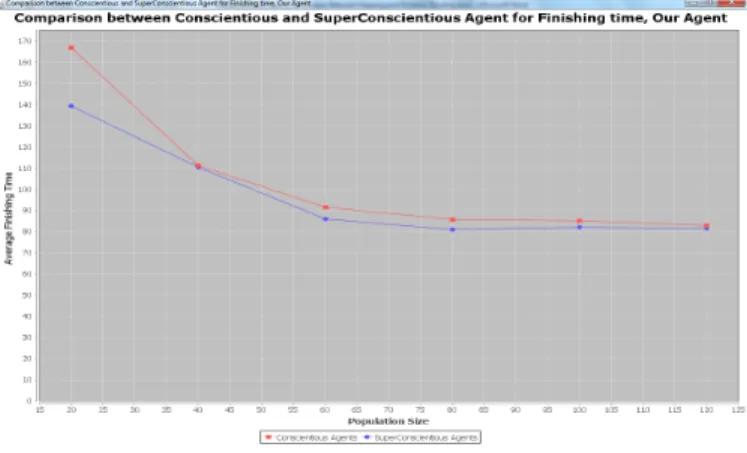
After examining the results of our use of stigmergy with super-conscientious and super-conscientious agents, we note that stigmergy super-conscientious agents outperform conscientious agents for all population sizes. The reason would seem to be that when using stigmergy, even two super-conscientious agents after visiting choose different path for traveling, while in case of the N. Minar agents, chances are that the two agents will choose identical neighbors for their next target node. Figure 6 plots the comparison between our stigmergy conscientious and super-conscientious agents.
Fig. 6. Comparison between conscientious and super-conscientious agents, our agents.
III. DYNAMIC NETWORKROUTING
A. Network Description, Environment
Consider a set of wireless nodes that are distributed in a physical domain. This network has all characteristics of the network that we described in section 2.1 but now consider that this network has a dynamic topology as opposed to a pre-determined network mapping. In the modified network, the arrangement of the network changes over time due to the mobility of some of the nodes. In [2] the authors assume a constant velocity for roughly half of nodes; in order to be
closer to real networks we assign random velocity to half of the nodes in the modified network. In addition, we assume that our mobile nodes run on battery power. This means that their power will decrease during the experiment and as a result, their radio range decrease as time goes by. All such assumptions result in a very dynamic network, where wireless links are broken and reformed as nodes leave localized areas of the network system. A small subset of the nodes, the gateways, is stationary, has high computational capabilities, and is connected to the outside world such as a LAN or the Internet. Every node in the networks must have at least one valid path to one of these gateways. An average packet will use a multi-hop path to reach one of those gateways. One example of such a network can be Mobile ad hoc network, MANeT. Every node has a simple routing table which agents update frequently. The nodes themselves run no programs; all topology mapping relies on the operation of the agents. The agents wander in the network and update any nodes on their path; they put a route to one of the gateway that they have just visited in the node’s routing table. The nodes use their routing table for directing packets toward their destination. In order to compare our results for different parameter setting we chose a network having 250 nodes. All of our experiments were performed with the same configuration and movement path of nodes.
B. Agents
We test two algorithms for how an agent chooses to move. One algorithm is a random agent that simply moves to a randomly-chosen, reachable node, at each simulation step. This agent provides a base for comparing agent performance using more directed algorithms. We also test an oldest-node agent that preferentially visits the adjacent node that it last visited the longest time before, that it never visited, or that it doesn’t remember visiting. This agent uses its history to try to avoid backtracking. Intuitively, we expect the agent to perform its task more efficiently because it is not repeating its own work. The agents use their history to update the routing table of every node. For more details about agent behaviour, see [2]. Frederick Ducatelle et al [9] proposed an algorithm for routing in mobile ad hoc networks based on ideas from the Nature-inspired Ant Colony Optimization framework.Their algorithm consists of both reactive and proactive components. The algorithm makes extensive use of ant-like mobile agents which sample full paths between source and destination nodes in a Monte Carlo fashion. Romit Roy Choudhury et al [10] used a type of agent like our oldest-node agent but their agent has about 4 times more overhead than ours. They also did not mentioned the network characteristics which used for the simulation. In [11] authors have shown the effect of the number of concurrent ants in a network. In general, a bigger ant population results in faster convergence while consuming higher bandwidth.
C. Experimental Model
Our model is implemented as a simple, discrete event, time-step based simulation. Every time-step of simulated time an agent does four things: First, the agent looks at all the neighbours of the node it is on and makes a decision about to where to go next. Second, in our agents, the agents that are on the same node can see each other and share their knowledge. Third, the agent moves itself to the new node, learning about the edge it travels. Fourth, it updates the routing table of the node it now occupies, using its own recent knowledge of the network. Our simulation system consists of 3000 lines of Java code implementing a discrete event scheduler, a graphical view, a plotting front-end, a data-collection system, and the simulated objects themselves: network nodes, network monitoring entity, and mobile agents. The measure of system performance is the average connectivity of the network after it has converged to its mean behaviour. For all our experiment we designate 12 of the 250 nodes to be gateway nodes. To measure the connectivity the fraction of nodes in the system that has a valid route to at least one gateway are counted. This measure is a reasonable aggregate of overall connectivity at any given time, as it models how many nodes have access to the outside world. We run each of our iterations for 300 time steps. For all of our parameter settings, the simulation converges to its mean behaviour at time 150 or well before. Therefore, we take as a measure of performance the average fraction of connectivity for all nodes from time 150 to 300. To factor out randomness in the initial placements of the agents, we report these numbers averaged over a set of 40 different runs of the same parameter set. All of our experiments are conducted with the same initial node placement and node movements.
D. Simulation Result
First of all, we examine all experiments in [2] in our new environment. All their results and discussion were consistent to new environment. Figure 7 shows the connectivity for 100 oldest-node agent over time. The network starts with zero connectivity then after few steps it get noticeable connectivity and finally the connectivity fluctuate around certain value. In fact this is a kind of distributed problem solving; because in [2], authors inject the agents in the network to perform routing task without any cooperation through negotiation or communication. For more detailed discussion see [2].
E. Parameter Setting for Two Agent Algorithms
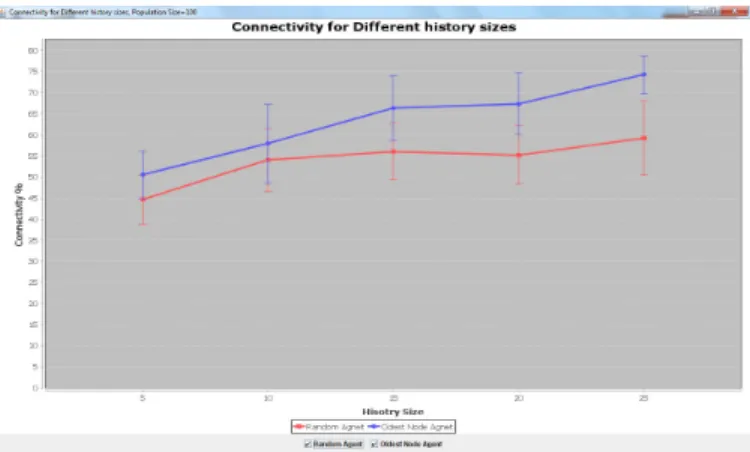
Types of agents, population size and history size of the agents are the three main variables in routing task. N. Minar et al alter these main variables independently; we performed their experiments in our environment and obtained the same results: oldest-node agent outperform random agent for any parameter setting. The higher the population size the higher connectivity and the more stable connectivity; the more the history size, the higher the connectivity and the more stability. Figure 7 and 8 plot the effects of various population size and history size on the connectivity respectively. These figures also show that
Fig. 7. Connectivity for 100 oldest-node agents.
for all parameter setting the oldest-node agent outperforms the random agent. For more detailed discussion see [2].
Fig. 8. Connectivity for different population size.
Fig. 9. Connectivity for different history size.
F. Effects of Learning
We examine the possibility of communication and learning. For both types of agent we permit agents to exchange the best path between themselves. In other words, agents that land on
the same node visit each other, compute best route based on the all agents routing information, and then all of them use that best route afterword. Figure 9 depicts the effect of inter-agent visiting on random agents for different cache size. However,
Fig. 10. Connectivity for random agents, visit each other or not.
the effect on performance is not the same for the oldest-node agents. In fact, visiting has a bad effect on efficiency for this kind of agents. The reason is that, after a meeting, all participating agents are going to be identical in term of history knowledge; and as we know the oldest-node agents make their moving decision based on their history size as opposed to the random agents; so they chase one another and as a result some nodes visit infrequently. A uniform distribution of the agents across the network during the experiment is a key element for indicating the percentage of connectivity; any small change in distribution has a great effect on connectivity. Figure 10 plots the effect of meeting between agents for oldest-node agent. One potential solution can be use randomness in wandering
Fig. 11. Connectivity for oldest-node agents, visit each other or not.
for the oldest-node agents like what N. Minar did for super-conscientious agents in network mapping.
IV. CONCLUSION
In this paper we examined two essential operations, network mapping and dynamic network routing, in the wireless ad
hoc networks using a software multi-agent solution. We set up our wireless networks, environment, as much possible as realistic. Then agents from [1], [2] were transformed to our environment; first of all, we made sure all the results and discussion that were done by N. Minar et al are held in new environment; and then compare our agents to their agents. Us-ing stigmergic communication, we improved the performance of all types of agents in network mapping scenario. We also examined direct communication in dynamic routing; the agents were permitted to exchange the best route in meeting session. As we discussed above, direct communication, has a positive effect on connectivity in case of random agents but on the other hand, has a negative effect on connectivity in case of oldest-node agents. Our main future work is, employing indirect communication, stigmergy, in dynamic routing problem as well. We strongly believe, stigmergy, can improve the agents performance effectively.
ACKNOWLEDGMENT
The authors would like to thank Marc Boyer for his helps and valuable comments.
REFERENCES
[1] N. Minar, K. H. Kramer, and P. Maes, “Cooporative mobile agents for mapping network,”the First Hungarian National Conference on Agent Based Computing May 24, 1998.
[2] K. H. Kramer, N. Minar, and P. Maes, “Cooporative mobile agents for dynamic network routing,”ACM SIGMOBILE Mobile Computing and Communications Review, vol. 3, pp. 12–16, 1999.
[3] M. Abdullah and H. Bakhsh, “Agent-based dynamic routing system for manets,” ICGST, Computer Networks and Internet Research Journal, vol. 9, 2009.
[4] O. Holland and C. Melhuish, “Stigmergy, self-organization, and sorting in collective robotics,” Artificial Life, Springer, vol. 5, pp. 173–202, 1999.
[5] A. Perez-Uribe and B. Hirsbrunner, “Learning and foraging in robot-bees,”In: SAB2000 Proceedings Supplement Book, Honolulu, vol. 5, pp. 185–194, 2000.
[6] H. V. D. Paunak, S. Brueckner, J. Sauter, and J. Posdamer, “Mechanisms and military applications for synthetic pheromones,”In: Workshop on Autonomy Oriented Computation, 2001.
[7] H. V. D. P. S. B. John A. Sauter, Robert Matthews, “Evolving adaptive pheromone path planning mechanisms,” In: Proceedings of the First International Joint Conference on Autonomous Agents and Multi-Agent Systems, ACM Press, pp. 434–440, 2002.
[8] A. Wurr and J. Anderson, “Multi-agent trail making for stigmergic navigation,”Lecture Notes in Computer Science, vol. 31, pp. 422–428, 2004.
[9] G. D. Caro1, F. Ducatelle1, and L. M. Gambardella1, “Anthocnet: An ant-based hybrid routing algorithm for mobile ad hoc networks,”Lecture Notes in Computer Science, Springer, vol. 3242, pp. 461–470, 2004. [10] R. R. Choudhury, K. Paul, and S. Bandyopadhyay, “Marp: A multi-agent
routing protocol for mobile wireless ad hoc networks,”Autonomous Agents and Multi-Agent Systems, Springer, vol. 8, pp. 47–68, 2004. [11] K. A. Amin and A. R. Mikler, “Agent-based distance vector routing: a
resource efficient and scalable approach to routing in large communica-tion networks,”Journal of Systems and Software, vol. 71, pp. 215–227, 2004.