G
1
Approximation of Conic Sections by
Bernstein-Jacobi Hybrid Polynomial Curves
Mao Shi
Abstract—A G1 approximation method of conic sections using Bernstein-Jacobi hybrid polynomial curves of arbitrary degree is proposed. Based on the method of weighted-sum-of-objective-function in the multi-objective optimization, the prob-lem can be converted to a scale optimization. Applying weighted least-squares, we obtain the resulting curve. Meanwhile, by the orthogonality of Jacobi polynomials, the inverse of matrix is avoided. Finally, some examples and figures were offered to demonstrate the efficiency and the simplicity of our methods.
Index Terms—Conic sections, Geometric continuity, Hybrid curves, Multi-objective optimization, Least-squares
I. INTRODUCTION
A
LTHOUGH rational B´ezier curves are the standard in the Initial Graphics Exchange Specification (IGES), some Computer Aided Design (CAD) systems only use polynomial expressions to deal with parametric curves. This is because rational B´ezier curves can’t be differentiated and integrated easily [1]–[6]. Many research papers have been published about approximation of conic sections by B´ezier curves since 1980s. Using geometric information such as point positions, tangents and curvatures, De Boor et al. [7] first applied Geometric Hermite Interpolation (GHI) method to accomplish a high accuracy approximation of circular arcs based on cubic B´ezier curves. Floater [8] [9] studied approximation by quadratic splines and B´ezier curves of odd degree n respectively. Both methods have the optimal approximation order2n. Fang [10] presented methods for ap-proximating conic sections using quintic polynomial curves. The constructed quintic polynomial curve hasG3-continuity with the conic section at the end points and G1-continuity at the parametric mid-point. Using the matrix form and the least squares method, Hu [11] researchedG1 approximation of conic sections by B´ezier curves of arbitrary degree inL2 norm, but the method requires to compute matrix inversion. In this paper, we mainly interested in theG1 approxima-tion of conic secapproxima-tions by B´ezier curves of arbitrary degree. In order to avoid calculating the inverse of matrix in L2 norm, we construct a Jacobi-Berenstein hybrid polynomial curve. With the help of the weighted sum method in multi-objective optimization [12] [13] [14] and the weighted least squares method we obtain results.The rest of the paper is organized as follow. In Section 2, some basic definitions and properties on conic sections and Jacobi-Bernstein polynomial curves were given. The problem of G1-constrained approximation of the conic sections is
Manuscript received October 22, 2018; revised January 22, 2019. This work is supported by the Fundamental Research Funds for the Central Universities (GK201703007).
Mao Shi is with the School of Mathematics and Information Sci-ence of Shaanxi Normal University, Xi’an 710062, China. e-mail: [email protected]
described. In Section 3, using the weighted least-squares method we introduce an explicit algorithm to solve the problem. Approximation errors and numerical examples are presented in Section 4 to confirm the effectiveness of the method. Finally, in Section 5 we conclude this paper.
II. PRELIMINARIES
A conic section can be represented in the standard rational B´ezier form by
P(t) = c(t)
ω(t)
=B
2
0(t)p0+B 2
1(t)ω1p1+B 2 2(t)p2
B2
0(t)+B12(t)ω1+B22(t)
, t∈[0,1], (1)
whereω1∈R+ is the weight,pi = (xi, yi) are the control
points and Bn i(t) =
n i
ti(1 −t)n−i are the Bernstein
polynomials.
A Jacobi-Bernstein hybrid curveQ˜(t)of degreencan be expressed as
˜
Q(t) =
r
X
i=0
qiBin(t) +ϕ(t)
N
X
j=0
˜
qjJj(r+1,s+1)(u)
+ n
X
i=n−s
qiBin(t), (2)
whereN =n−(r+s+2),u= 2t−1,ϕ(t) =tr+1(1−t)s+1,
qi = (¯xi,y¯i) are the control points of the B´ezier curves,
˜
qi= (˜xi,y˜i)are the control points of the Jacobi curves and
Jj(r+1,s+1)(u)are the Jacobi polynomials.
Setρ(t)>0is a weight function and Fx andFy are the
components of the vector equation
(Fx, Fy) =
Z 1 0
ρ(t)P(t)−Q˜(t)2dt.
Based on the method of weighted-sum-of-objective-function, the problem ofG1 approximation of the conic sectionP(t) by B´ezier curves is to find a Jacobi-Bernstein hybrid curve
˜
Q(t)of degreenso that
Fλ, η,{q˜i}n
−(r+s+2)
i=0
= 1 2(F
x
+Fy), (3)
is minimized and the control points at the end points satisfy
q0 =p0, qn=p2,
q1=p0+2ω
n λ∆p0, qn−1=p2−
2ω
n η∆p1, (4) whereλandη are free parameters.
Next, we review and derive several of mathematical pre-liminaries on Bernstein polynomials, classical Jacobi poly-nomials and conic sections which are used in the paper.
Lemma 1.Setting Bnj
ij (t) be a Bernstein polynomial of
degreenj, multiplication ofmBernstein polynomials satisfy
IAENG International Journal of Applied Mathematics, 49:2, IJAM_49_2_08
the following equation [6],
m
Y
j=1
Bnj ij (t) =
M N J
B
N
J(t), (5)
and the corresponding definite integral can be written as Z1
0
m
Y
j=1
Bnj ij(t)dt=
M
(N+ 1) NJ, (6)
whereM =Qmj=1 nj
ij
,N =Pmj=1nj andJ =Pmj=1ij. Lemma 2.Given two B´ezier curvesX(t) =
n P
j=0
xnjBjn(t)
of degreenandY(t) = m P
k=0
ymk Bkm(t)of degreem, we have [15]
X(t)Y(t) =
m+n
X
i=0
Ci(ymk,x n j)B
m+n
i (t), (7)
where
Ci(ymk,x n j) =
min(m,i) X
l=max(0,i−n)
m l
n i−l
m+n i
y
m l x
n
i−l. (8)
Lemma 3. A Jacobi polynomial can be represented by Bernstein polynomials as follows [16]
Jj(r+1,s+1)(u) = j X
i=0
ajiBij(t), (9) where
aji := (−1)(i+j) j+r+1
i
j+s+1
j−i
j i
. (10)
Furthermore, using (7), (9) and (10), we obtain
¯
Gα,βi,j (α, β, i, j)
=
Z1 0
tα(1−t)βJi(r+1,s+1)(u)Jj(r+1,s+1)(u)dt
=
Z1 0
Bαα(t)B β
0(t)
i
X
m=0
aimB i m(t)
j
X
l=0
ajlBlj(t)dt
= i+j
X
l=0
Cl(aim, a j l)
Z 1 0
Bαα(t)B β
0(t)B
i+j l (t)dt
= 1
α+β+i+j+ 1 i+j
X
l=0
i+j l
α+β+i+j α+l
Cl(a
i
m, ajl), (11)
whereCl(aim, a j
l)are scale forms of (8).
Moreover, when α=s+ 1andβ =r+ 1, the equation
¯
Gα,βi,j (α, β, i, j)has the orthogonality, that is
γi(s+1,r+1)= ¯Gα,βi,j (s+ 1, r+ 1, i, j) =
1 2i+r+s+3
(i+s+1
s+1 )
(i+r+s+2
s+1 )
i=j,
0 i6=j. (12)
Similarly, given a Jacobi polynomialJj(r+1,s+1)(u)and a Bernstein polynomialBkn(t), we have
Gα,βi,j (α, β, k, j) =
Z1 0
tα(1−t)βBkn(t)J
(r+1,s+1)
j (u)dt
= 1
α+β+n+j+ 1 j
X
i=0
(−1)(i+j) n k
j+r+1
i
j+s+1
j−i
α+β+n+j α+k+i
. (13)
Lemma 4.LetX(t) = n P
i=0
xn
iBin(t)be a B´ezier curve of
degreenandP(t)be a conic section given by equation (1), we have
ξ(n,xni) =
Z1 0
X(t)P(t)dt
= n+2 X
i=2
i−1 X
s=1
n+ 2 i
!
aas∆icn+2 0
i−s +aA
× 4 √
4a−1arctan 1 √
4a−1, a > 1 4, 2
√ 1−4aln
1−√1−4a
1+√1−4a
, a <
1 4,
−4, a= 14,
(14)
where a=2(1−1ω
1), ai= 2−(i−1)
[(i−1)/2]
P
s=0
i
2s+1
(1−4a)s, i
6n+ 2, an+3= 2−(n−2)a
[n/2]
P
s=0
n−1 2s+1
(1−4a)s, and
A=cn0+2+
(n+2)∆cn0+2
2 +
an+2 2 +an+3
nP+2
i=2
n+2
i
∆icn0+2. Finally, for a Jacobi polynomialJj(r+1,s+1)(u)and a conic sectionP(t), by (14), it yields
ξ(r+s+j+ 2, ck)
=
Z 1 0
tr+1(1−t)s+1Jj(r+1,s+1)(u)P(t)dt
=
Z 1 0
P(t)
j
X
i=0
(−1)(i+j) j+r+1
i
j+s+1
j−i
r+s+j+2
r+i+1 B
r+s+j+2
r+i+1 (t)dt
=
Z 1 0
P(t)
r+j+1 X
k=r+1
ckBrk+s+j+2(t)dt
=
Z 1 0
P(t)
r+s+j+2 X
k=0
ckBkr+s+j+2(t)dt
where
ck=
(−1)(k−r−1+j)( j+r+1
k−r−1)(
j+s+1
j−k+r+1)
(r+s+j+2
k )
, k=r+1, ..., r+j+1,
0, others.
III. G1
POLYNOMIAL APPROXIMATION OF CONIC SECTIONS
The G1 approximation of conic sections means r=s= 1. According to the method of weighted least squares [16], derivatives ofF(·)with respective to pointsq˜k must be zero,
so we have Z 1
0
ρ(t)ϕ(t)P(t)−Q˜(t)Jk(2,2)(2t−1)dt= 0.
Lettingρ(t) = 1
ϕ(t) and substituting (3), (12) and (13) into the above equation, we obtain
˜
qk=
1
γk(2,2)
( Z 1
0 "
P(t)−
1 X
i=0
Bni(t)p0+
n
X
i=n−1
Bin(t)p2 !
−2ω n (λB
n
1(t)∆p0−ηBnn−1(t)∆p1)
Jk(2,2)(u)dt
= 1
γk(2,2)
"
ξ(k, aki)−
1 X
i=0
p0G0i,k,0− n
X
i=n−1
p2G0i,k,0
−2ω
n λ∆p0G
0,0
1,k−η∆p1G
0,0
n−1,k
.
IAENG International Journal of Applied Mathematics, 49:2, IJAM_49_2_08
Setting
Ak=
1
γk(2,2)
"
ξ(k, aki)−
1 X
i=0
p0G0i,k,0−
n
X
i=n−1
p2G0i,k,0 #
,
Bk=
2ω∆p0G01,,k0
nγk(2,2) and Ck=
2ω∆p1G0n−,01,k nγk(2,2) ,
˜
qk can be rewritten as
˜
qk =Ak−λBk+ηCk. (15)
From now on, we can calculate all the control points of the approximation curve Q˜(t)by equation (15). In order to obtain the values of λ andη, we substituting (15) into the objective function (3) and letting ρ(t) = 1 yield
(∂Fx ∂λ +
∂Fy ∂λ = 0 ∂Fx
∂η + ∂Fy
∂η = 0
(16)
and
∂(Fx, Fy)
∂λ =λΠ1−ηΠ2−Π3, ∂(Fx, Fy)
∂η =λΠ4−ηΠ5−Π6,
where
Π1=
Z 1 0
2ω n ∆p0B
n
1(t)−ϕ(t)
n−4 X
j=0
BjJj(2,2)(u)
!2
dt
=(2ω∆p0)
2
n(4n2−1)−
4ω∆p0
n n−4 X
j=0
BjG21,,j2+ n−4 X
j=0
n−4 X
k=0
BjBkG¯4j,k,4,
Π2=Π4
=
Z 1 0
2ω n ∆p1B
n
n−1(t)−φ(t)
n−4 X
j=0
CjJj(2,2)(u)
!
× 2ω n ∆p0B
n
1(t)−φ(t)
n−4 X
j=0
BjJj(2,2)(u)
!
dt
=(2ω)
2
∆p0∆p1
(2n+ 1) 2nn +
n−4 X
j=0
n−4 X
k=0
CjBkG¯4j,k,4
−2ω n
n−4 X
j=0
∆p0CjG21,,j2+ ∆p1BjG2n,−21,j
,
Π3=
Z 1 0
2ω n ∆p0B
n
1(t)−φ(t)
n−4 X
j=0
BjJj(2,2)(u)
!
× P(t)−
1 X
i=0
Bni(t)p0−
n
X
i=n−1
Bin(t)p2
−ϕ(t) n−4 X
j=0
AjJj(2,2)(u)
!
dt
=2ω∆p0 n
"
ξ(n, uλi)− n 2n+ 1
1 X i=0 n i p0 2n i+1 + n X
i=n−1
n i p2 2n i+1 ! − n−4 X
j=0
AjG21,,j2
#
− n−4 X
j=0
Bj ξ(j+ 4, ck)−
1 X
i=0
p0G2i,j,2
− n
X
i=n−1
p2G2i,j,2− n−4 X
i=0
AiG¯4i,j,4
!
,
Π5=
Z 1 0
2ω n ∆p1B
n
n−1(t)−ϕ(t)
n−4 X
j=0
CjJj(2,2)(u)
!2
dt
=(2ω∆p1)
2
n(4n2−1)−
4ω∆p1
n n−4 X
j=0
CjG2n,−21,j+ n−4 X
j=0
n−4 X
k=0
CjCkG¯4j,k,4
and
Π6=
Z 1 0
P(t)−
1 X
i=0
p0Bin(t)−
n
X
i=n−1
p2Bin(t)
−φ(t) n−4 X
j=0
CjJj(2,2)(u)
!
×
2ω n ∆p1B
n n−1(t)
−φ(t) n−4 X
j=0
CjJj(2,2)(u)
!
dt
=2ω∆p1
n ×[ξ(n, u η i)−
n (2n+ 1)
1 X i=0 n i p0 2n n+i−1
+ n
X
i=n−1
n i
p2
2n n+i−1
!
− n−4 X
j=0
AjG2n,−21,j
#
− n−4 X
j=0
Cj ξ(j+ 4, ck)−
1 X
i=0
p0G2i,j,2
−
1 X
i=0
p2G2i,j,2− n−4 X
k=0
AkG¯4j,k,4
!
,
where
uλi =
(
1 i=1
0 Others
and
uηi =
(
1 i=n-1
0 Others .
Finally, we can obtain control points˜qiof equation (2) from the system of linear equations (16).
IV. NUMERICAL EXAMPLES
In this section, we provide two examples to show the effective of our method. For each example, we use discrete Hausdorff distances to express approximation error.
Example 1 (Also Example 1. in [11]) Given a conic sectionP(t)with control points(0,0),(1.2,1.5),(1,0) and the weight ω1 = 3. Table I lists λ,η and error obtained by Hu’s method and ours method, respectively. The resulting curves of degree n = 4 are shown in the left-hand side of Fig. 1 and the corresponding error distance curves are illustrated in the right-hand side of Fig. 1. Fig. 2 shows the resulting curves with degreen= 6 and corresponding error distance curves.
TABLE I
APPROXIMATION OF CONIC SECTIONS WITH POLYNOMIALS OF DEGREE
4AND6
n Hu’s method Our method
λ η ε λ η ε
4 0.8091 0.8273 2.14×10−2 0.8168 0.8368 1.94×10−2
6 0.9438 0.9507 5.1×10−3 0.9503 0.9524 5.1×10−3
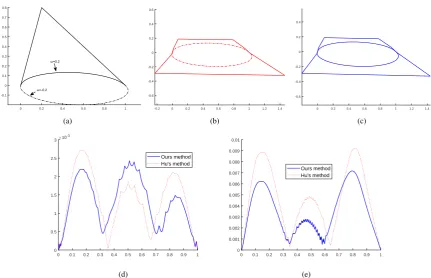
[image:3.595.299.508.51.363.2]Example 2 (Also Example 2. in [11]) Given a conic sectionP(t)with control points(0,0),(0.2,0.8),(1,0) and the weight ω1 = 0.2 and ω1 = −0.2, respectively. Table II lists λ, η and error obtained by Hu’s method and ours method, respectively. The resulting curves are shown in (a) of Fig. 3 , the corresponding error distance curves forω1= 0.2 are illustrated in (b) of Fig. 3 and the corresponding error distance curves forω1= 0.2 are illustrated in (c) of Fig. 3.
IAENG International Journal of Applied Mathematics, 49:2, IJAM_49_2_08
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0
0.5 1 1.5
(a)
0 0.5 1 1.5
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
(b)
0 0.5 1 1.5
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
(c)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.005 0.01 0.015 0.02 0.025
Ours method Hu's method
[image:4.595.57.280.641.692.2](d)
Fig. 1. (a) The conic section. (b) The resulting curve of degree 4 using Hu’s method. (c) The resulting curve of degree 4 using ours method (d) The
corresponding error distance curves. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
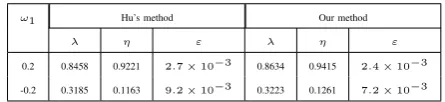
TABLE II
APPROXIMATION OF CONIC SECTIONS WITH POLYNOMIALS OF DEGREE
5
ω1 Hu’s method Our method
λ η ε λ η ε
0.2 0.8458 0.9221 2.7×10−3 0.8634 0.9415 2.4×10−3
-0.2 0.3185 0.1163 9.2×10−3 0.3223 0.1261 7.2×10−3
V. CONCLUSION
In this paper, we have studied G1-constrained approx-imation of conic section with arbitrary degree Bernstein-Jacobi hybrid polynomial curves. As [11] explained our method is to minimize the L2-error distance rather than to
minimize the bound on the Hausdorff error distance, So Hausdorff error distance is larger than that by the method [18], [19] for the quartic B´ezier curves. One of our work is to generalize our method to conic section approximated by the quartic Bernstein-Jacobi hybrid polynomial curves based on the bound on the Hausdorff error distance.
REFERENCES
[1] T. W. Sederberg, M. Kakimoto, ”Approximating rational curves using
polynomial curves,” in NURBS for curve and surface Design, SIAM,
Philadelphia, 1991, pp. 149-158.
[2] B. G. Lee, Y. B. Park, ”Approximate conversion of rational B´ezier
curves,”The journal of the Korean Society for Industrial and Applied
Mathematics, vol. 2, no. 1, pp. 88-93, 1998.
[3] S. Lewanowicz, P. Wo´zny, P. Keller, ”Polynomial approximation of
rational B´ezier curves with constraints,”Numerical Algorithms, vol.
59, no. 4, pp. 607-622, 2012.
IAENG International Journal of Applied Mathematics, 49:2, IJAM_49_2_08
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0
0.5 1 1.5
(a)
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 0
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
(b)
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 0
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
(c)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0
1 2 3 4 5 6 10
-3
Ours method Hu's method
[image:5.595.123.477.68.375.2](d)
Fig. 2. (a) The conic section. (b) The resulting curve of degree 6 using Hu’s method. (c) The resulting curve of degree 6 using ours method (d) The
corresponding error distance curves. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
0 0.2 0.4 0.6 0.8 1 -0.1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
(a)
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 -0.6
-0.4 -0.2 0 0.2 0.4 0.6
(b)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 -0.6
-0.4 -0.2 0 0.2 0.4
(c)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0
0.5 1 1.5 2 2.5
3 10
-3
Ours method Hu's method
(d)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0
0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01
Ours method Hu's method
(e)
Fig. 3. (a) A whole ellipse. (b) Bzier curves of degree 5 using Hu’s method. (c) Bzier curves of degree 5 using Ours method. (d) The corresponding
error distance curves forω= 0.2. (e)The corresponding error distance curves forω=−0.2. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
IAENG International Journal of Applied Mathematics, 49:2, IJAM_49_2_08
[image:5.595.81.513.451.729.2][4] L.A. Piegl, W. Tiller, K. Rajab, ”It is time to drop the ”R” from
NURBS,”Engineering with Computers, vo. 30, no. 4, pp. 703-714,
2014.
[5] Q. Q. Hu, H. X. Xu, ”Constrained polynomial approximation of
ratio-nal B´ezier curves using reparameterization,”Journal of Computational
and Applied Mathematics, vol. 249, pp. 133-143, 2013.
[6] M. Shi, J. S. Deng, ”Polynomial approximation of rational B´ezier
curves,”Journal of Computational Information Systems, vol. 11, no.
20, pp. 7339-7346, 2015.
[7] C. de Boor, K. Hllig, M. A. Sabin, ”High accuracy geometric Hermite
interpolation,”Computer Aided Geometric Design, vol. 4, no. 4, pp.
269-278, 1987.
[8] M. Floater, ”High order approximation of conic sections by quadratic
splines,”Computer Aided Geometric Design, vol. 12, no. 6, pp.
617-637, 1995.
[9] M. Floater, ”An O(h2n) Hermite approximation for conic sections,”
Computer Aided Geometric Design, vol. 14, no. 2, pp. 135-151, 1997.
[10] L. Fang, ”G3 approximation of conic sections by quintic polynomial
curves,”Computer Aided Geometric Design, vol. 16, no. 8,
pp.755-766, 1999.
[11] Q. Q. Hu, ”ExplicitG1approximation of conic section using B´ezier
curves of arbitrary degree,” Journal of Computational and Applied
Mathematics, vol. 292, pp. 505-512, 2016.
[12] K. Deb, ”Multi-Objective Optimization using Evolutionary Algorithm-s,”John Wiley&Sons LTD, 2001.
[13] M. Shi, B. S. Kang, ”Degree Reduction for B´ezier Curve Based on
Genetic Algorithms,”Computer Applications and Software, vol. 15,
no. 9, pp.15-17, 2003 (In Chinese).
[14] M. Shi, ”Degree Reduction of Disk Rational B´ezier Curves Using
Multi-Objective Optimization Techniques,”IAENG International
Jour-nal of Applied Mathematics, vol. 45, no. 4, pp. 392-397, 2015. [15] R. T. Farouki, V. T. Rajan, ”Algorithms for polynomials in Bernstein
form,”Computer Aided Geometric Design, vol. 5, no. 1, pp. 1-26,
1998.
[16] G. Szeg˝o, ”Orthgonal polynomials, 4th.”, American Mathematical
Society, 1975.
[17] Q. Q. Hu, ”Approximating conic sections by constrained B´ezier
curves of arbitrary degree,” Journal of Computational and Applied
Mathematics, vol. 236, pp. 2813-2821, 2012.
[18] Q.Q. Hu, ”G1 approximation of conic sections by quartic B´ezier
curves,”Computers and Mathematics with Applications, vol. 68, no.
12, pp. 1882-1891, 2014.
[19] X. L. Han, X. Guo, ”Optimal parameter values for approximating conic
sections by the quartic B´ezier curves,”Journal of Computational and
Applied Mathematics, vol. 322, pp. 86-95, 2017.