Contents lists available atScienceDirect
Journal
of
Computer
and
System
Sciences
www.elsevier.com/locate/jcss
Model-checking
for
Resource-Bounded
ATL
with
production
and
consumption
of
resources
✩
Natasha Alechina
a,∗
,
Brian Logan
a, Hoang Nga Nguyen
b, Franco Raimondi
caSchoolofComputerScience,TheUniversityofNottingham,UK bCentreforMobilityandTransport,CoventryUniversity,UK cDepartmentofComputerScience,MiddlesexUniversity,UK
a
r
t
i
c
l
e
i
n
f
o
a
b
s
t
r
a
c
t
Articlehistory:
Received 19 August 2016 Accepted 19 August 2016 Available online xxxx
Keywords: Model-checking Resources Coalitional ability
Verification of multi-agent systems
Severallogicsforexpressingcoalitionalabilityunderresourceboundshavebeenproposed and studied in the literature. Previous work has shown that if only consumption of resources is considered or the total amount of resources produced or consumed on any path in the system is bounded, then the model-checking problem for several standardlogics,suchasResource-BoundedCoalitionLogic(RB-CL)andResource-Bounded Alternating-Time Temporal Logic (RB-ATL) is decidable. However, for coalition logics withunboundedresource productionand consumption,onlysomeundecidabilityresults are known.In this paper, we show that the model-checking problem for RB-ATLwith unboundedproductionandconsumptionofresourcesisdecidablebutEXPSPACE-hard.We alsoinvestigatesometractablecasesandprovideadetailedcomparisontoavariantofthe resourcelogicRAL,togetherwithnewcomplexityresults.
©2017TheAuthors.PublishedbyElsevierInc.ThisisanopenaccessarticleundertheCC BYlicense(http://creativecommons.org/licenses/by/4.0/).
1. Introduction
Alternating-TimeTemporalLogic(ATL)[1]iswidelyusedinverificationofmulti-agentsystems.ATLcan express prop-ertiesrelatedtocoalitionalability,forexample,one canstatethatagroupofagents A hasastrategy(achoiceofactions) suchthatwhatevertheactionsbytheagentsoutsidethecoalition,anycomputationofthesystemgeneratedbythestrategy satisfiessometemporalproperty.A numberofvariationsonthesemanticsofATLexist:agentsmayhaveperfectrecallorbe memoryless,andtheymayhavefullorpartialobservability.Inthecaseoffullyobservablemodelsandmemorylessagents, the model-checkingproblemfor ATLis polynomialin thesize ofthe modelandtheformula, while itis undecidablefor partiallyobservable models whereagentshaveperfectrecall[2].Additionally, eveninthe simplecaseoffullyobservable models andmemorylessagents, thecomplexity increasessubstantially ifthe model-checking problemtakesinto account modelswithcompact(implicit)representations[2].
Inthispaper, weconsider an extensionof perfectrecall,fullyobservable ATL whereagentsproduceandconsume re-sources. The properties we are interested in are related to coalitional ability under resource bounds. Instead of asking whetheragroup ofagentshasastrategy toenforcea certaintemporalproperty, we areinterested inwhetherthegroup hasastrategythatcanbeexecutedunderacertainresourcebound(e.g.,iftheagentshaveatmostb1 unitsofresourcer1
✩ This work was supported by the Engineering and Physical Sciences Research Council [grants EP/K033905/1 and EP/K033921/1].
*
Corresponding author.E-mailaddresses:[email protected](N. Alechina), [email protected](B. Logan), [email protected](H.N. Nguyen), [email protected]
(F. Raimondi).
http://dx.doi.org/10.1016/j.jcss.2017.03.008
andb2 unitsofresourcer2).Clearly,some actionsmaynolongerbe usedaspartofthestrategyiftheircostexceeds the bound. Thereareseveralwaysinwhichtheprecisenotionofthecost ofa strategycanbe defined.Forexample,onecan define itasthemaximalcostofanypath(computationofthesystem)generatedbythestrategy, wherethecostofapath isthesumofresourcesproducedandconsumedbyactions onthepath.Wehavechosen adifferentdefinitionwhichsays thatastrategyhasacostatmostbifforeverypathgeneratedbythestrategy, everyprefixofthepathhascostatmostb. Thismeans thatastrategy cannot,forexample,startwithexecuting anactionthatconsumesmorethan b resources,and then‘makeup’forthisbyexecutingactionsthatproduceenoughresourcestobringthetotalcostofthepathunderb.Itis howeverpossibletofirstproduceenoughresources,andthenexecuteanactionthatcostsmorethanb,solongasthecost ofthepathislessthanb.
There arealsomanychoicesfortheprecisesyntax ofthelogicandthetruthdefinitionsoftheformulas.Forexample, in [3]several versions are given, intuitively corresponding to considering resource bounds both on the coalition A and the restoftheagentsinthesystem, considering afixed resourceendowment of A in theinitialstate whichaffectstheir endowment afterexecuting some actions, etc. Inthis paperwe give a precise comparisonof ourlogic withthe variants of
L
RAL introduced in[3],andintheprocess solveanopen problemstatedin[3].In[4,5] differentsyntax andsemanticsare considered,inwhichtheresourceendowment ofthewholesystemistakenintoaccountwhenevaluatingastatement concerning a group of agents A. As observed in [3], subtle differences in truth conditions for resource logics result in thedifferencebetweendecidabilityandundecidabilityofthemodel-checkingproblem.In[3],theundecidabilityofseveral versions of thelogics isproved. Recently, even more undecidability resultswere shown in[6].The only decidable cases considered in [3] are an extension of Computation Tree Logic (CTL) [7] with resources (essentially one-agent ATL) and the versionwhereonevery pathonlya fixedfiniteamountofresources canbeproduced. Similarly,[4]givesadecidable logic, PRB-ATL(PricedResource-Bounded ATL),wherethetotalamountofresources inthesystemhasa fixedbound.The model-checkingalgorithmforPRB-ATLrunsintimepolynomialinthesizes ofthemodelandtheformula,andexponential inthenumberofresourcesandthesizeoftherepresentation(ifinbinary)oftheresourcebounds.In[5]anEXPTIMElower boundinthenumberresourcesandinthesizeoftherepresentation(ifinbinary)oftheresourceboundsisshown.
Thestructureofthispaperisasfollows.Insections2,3,and4,weintroduceResource-BoundedATLwithproductionand consumptionofresources,amodel-checkingalgorithmforit,andprovethatthemodel-checkingproblemisEXPSPACE-hard. Thispartofthepaperextends[8].Insection5wediscusstwospecialcaseswithfeasiblemodel-checking,oneofthembeing ageneralisationofthemodel-checkingalgorithmfor(production-free)RB-ATLintroducedin[9]tounboundedresources.In section6wegiveadetailedcomparisonwiththelogicsin[3]andshowthatforoneofthemthemodel-checkingproblem isdecidable,solvinganopenproblemstatedin[3].1
2. SyntaxandsemanticsofRB
±
ATLThe logicRB-ATLwasintroduced in[9].Here wegeneralisethedefinitionsfrom[9]toallowforproductionaswellas consumption ofresources.Toavoidconfusionwiththeconsumption-onlyversionofthelogicfrom[9],werefertoRB-ATL withproductionandconsumptionofresourcesasRB
±
ATL.LetAgt
= {
a1,
. . . ,
an}
be asetofnagents,Res= {
res1,
. . . ,
resr}
bea setofr resources,beasetofpropositionsand B
=
N
r∞beasetofresourceboundswhere
N
∞=
N
∪ {∞}
. FormulasofRB±
ATLaredefinedbythefollowingsyntaxφ, ψ
::=
p| ¬
φ
|
φ
∨
ψ
|
Abφ
|
Ab2
φ
|
Abφ
U
ψ
where p
∈
isaproposition, A
⊆
Agt,andb∈
Bisaresourcebound.Here,Abφ
meansthatacoalition A canensure thatthenextstatesatisfiesφ
underresourceboundb.Ab2
φ
meansthat A hasastrategytomakesurethatφ
isalwaystrue, and the cost of this strategy is at most b. Similarly,
Abφ
U
ψ
means that A has a strategy to enforceψ
whilemaintainingthetruthof
φ
,andthecostofthisstrategyisatmostb.Weextendthedefinitionofaconcurrentgamestructurewithresourceconsumptionandproduction.
Definition1.Aresource-boundedconcurrentgamestructure(RB-CGS)isatupleM
=
(
Agt,
Res,
S,
,
π
,
Act,
d,
c,
δ)
where:•
Agtisanon-emptysetofnagents,Resisanon-emptysetofrresourcesandS isanon-emptysetofstates;•
isafinitesetofpropositionalvariablesand
π
:
→
℘ (
S)
isatruth assignmentwhichassociateseachproposition inwithasubsetofstateswhereitistrue;
•
Actisanon-emptysetofactionswhichincludesidle,andd:
S×
Agt→
℘ (
Act)
\ {∅}
isafunctionwhichassignstoeachs
∈
S anon-emptyset ofactions availabletoeach agenta∈
Agt.Forevery s∈
S anda∈
Agt,idle∈
d(
s,
a)
.We denote jointactionsbyallagentsinAgtavailableatsby D(
s)
=
d(
s,
a1)
× · · · ×
d(
s,
an)
;•
c:
S×
Agt×
Act→
Z
r isa partialfunction whichmapsa state s,an agent a andan actionα
∈
d(
s,
a)
toa vector of integers,where theintegerin positioni indicates consumptionorproduction ofresourceresi by theaction (positivevalue forconsumption andnegative value forproduction). Westipulate thatc
(
s,
a,
idle)
= ¯
0 for all s∈
S anda∈
Agt, where0¯
=
0r;•
δ
:
S×
Act|Agt|→
S is a partial function that maps every s∈
S and joint actionσ
∈
D(
s)
to a state resulting from executingσ
ins.Givena RB-CGS M, we denotetheset ofall infinitesequences of states(infinite computations)by Sω and theset of non-empty finitesequences(finitecomputation)ofstatesby S+.Foracomputation
λ
=
s0s1. . .
∈
Sω we usethenotationλ
[
i]
=
si andλ
[
i,
j]
=
si. . .
sj.GivenaRB-CGS Mandastate s
∈
S,ajointactionbyacoalition A⊆
Agt isatupleσ
=
(
σa
)
a∈A (whereσa
istheactionthatagentaexecutesaspartof
σ
,theathcomponentofσ
)suchthatσa
∈
d(
s,
a)
.ThesetofalljointactionsforA atstatesisdenotedby DA
(
s)
.Givenajointactionbythegrandcoalitionσ
∈
D(
s)
,σA
(aprojectionofσ
on A)denotesthejointactionexecutedby Aaspartof
σ
:σA
=
(
σa
)
a∈A.Thesetofallpossibleoutcomesofajointactionσ
∈
DA(
s)
atstatesis:out(s,σ
)
= {
s∈
S| ∃
σ
∈
D(s):
σ
=
σ
A∧
s=
δ(s,σ
)
}
In the sequel, we use the usual point-wise notation for vector comparison andaddition. In particular,
(
b1,
. . . ,
br)
≤
(
d1,
. . . ,
dr)
iffbi≤
di∀
i∈ {
1,
. . . ,
r}
,(
b1,
. . . ,
br)
=
(
d1,
. . . ,
dr)
iffbi=
di∀
i∈ {
1,
. . . ,
r}
,and(
b1,
. . . ,
br)
+
(
d1,
. . . ,
dr)
=
(
b1+
d1,
. . . ,
br+
dr)
. However, for convenience we define(
b1,
. . . ,
br)
< (
d1,
. . . ,
dr)
as(
b1,
. . . ,
br)
≤
(
d1,
. . . ,
dr)
and(
b1,
. . . ,
br)
=
(
d1,
. . . ,
dr)
.Weassumethatforanyb∈
N
,b≤ ∞
,b+ ∞
= ∞
and∞
−
b= ∞
.Givenafunction f returningavector,wealsodenoteby fi thefunctionthatreturnsthei-thcomponentofthevectorreturnedby f.
The cost ofa jointaction
σ
∈
DA(
s)
is definedascostA(
s,
σ
)
=
a∈Ac(
s,
a,
σa
)
andthesubscript A is omittedwhen A=
Agt.GivenaRB-CGSM,astrategyforacoalition A
⊆
Agtisamapping FA:
S+→
Act|A|suchthat,foreveryλ
s∈
S+,FA(λ
s)
∈
DA(
s)
.Acomputationλ
∈
Sω isconsistentwithastrategy FAiff,foralli≥
0,λ
[
i+
1]
∈
out(λ
[
i]
,
FA(λ
[
0,
i]
))
.Wedenoteby out(
s,
FA)
thesetofallcomputationsλ
startingfromsthatareconsistentwithFA.Givenaboundb
∈
B,acomputationλ
∈
out(
s,
FA)
isb-consistentwithFA iff,foreveryi≥
0,i
j=0
costA(λ
[
j]
,
FA(λ[
0,
j]
))
≤
bNotethatthisdefinitionimpliesthatthecostofeveryprefixofthecomputationisbelowb.
The set of all computations starting from state s that are b-consistent with FA is denoted by out
(
s,
FA,
b)
. FA is a b-strategyiffout(
s,
FA)
=
out(
s,
FA,
b)
foranystates.GivenaRB-CGS Mandastate sofM,thetruthofaRB
±
ATLformulaφ
withrespecttoM andsisdefinedinductively onthestructureofφ
asfollows:•
M,
s|=
piffs∈
π
(
p)
;•
M,
s|= ¬
φ
iffM,
s|=
φ
;•
M,
s|=
φ
∨
ψ
iffM,
s|=
φ
orM,
s|=
ψ
;•
M,
s|=
Abφ
iff∃
b-strategy FAsuchthatforall
λ
∈
out(
s,
FA)
:M,
λ
[
1]
|=
φ
;•
M,
s|=
Ab2
φ
iff∃
b-strategy FAsuchthatforall
λ
∈
out(
s,
FA)
andi≥
0: M,
λ
[
i]
|=
φ
;and•
M,
s|=
Abφ
U
ψ
iff∃
b-strategy FA such that for allλ
∈
out(
s,
FA)
,∃
i≥
0: M,
λ
[
i]
|=
ψ
and M,
λ
[
j]
|=
φ
for all j∈ {
0,
. . . ,
i−
1}
.Since the infinite resource bound version of RB
±
ATL modalities correspond to the standard ATL modalities, we will write A∞¯φ
,A∞¯φ
U
ψ
,A∞¯2
φ
asAφ
,Aφ
U
ψ
,A2
φ
,respectively.Whenthecontextisclear,wewill sometimeswrites|=
φ
insteadofM,
s|=
φ
.Note that although we onlyconsider infinite paths, thecondition that the idle action isalways available andcosts 0
¯
makes themodel-checking problemeasier(weonly needto finda strategywitha finiteprefix underbound b to satisfy
formulasoftheform
Abφ
andAbφ
U
ψ
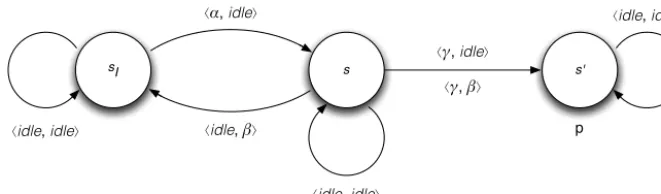
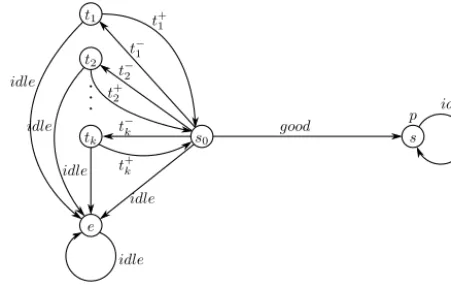
,andthenthestrategycanmaketheidlechoiceforever).As an example ofthe expressivity ofthe logic, consider themodel inFig. 1 withtwo agents a1 and a2 andtwo re-sourcesr1 andr2.Letusassumethat c
(
sI,
a1,
α
)
= −
2,
1(actionα
produces2unitsofr1 andconsumesoneunitofr2),c
(
s,
a2,
β)
=
1,
−
1andc(
s,
a1,
γ
)
=
5,
0.Then agenta1 onits ownhasastrategy toenforcea statesatisfying p under resourceboundof3 unitsofr1 and1 unitofr2 (M,
sI|=
{
a1}
3,1U
p):a1 hastoselectactionα
insI whichrequiresFig. 1.An example with consumption and production of resources.
p holds.Afterthis,a1 hastoselectidle forever,whichdoesnotrequireanyresources.Any smallerresourceboundisnot sufficient.However, bothagentshaveastrategytoenforcethesameoutcome undera smallerresource boundofjustone unitofr2(M
,
sI|=
{
a1,
a2}
0,1U
p):agenta2 needstoselectβ
anda1 idleinsuntiltheagentshavegonethroughthe loopbetweensI andsfourtimesandaccumulatedenoughofresourcer1 toenableagenta1 toperformγ
ins.3. ModelcheckingRB
±
ATLThe model-checkingproblemforRB
±
ATListhequestion whether,foragivenRB-CGS structure M,a states in Mand anRB±
ATLformulaφ
0,M,
s|=
φ
0.Inthissectionweprovethefollowingtheorem:Theorem1.Themodel-checkingproblemforRB
±
ATLisdecidable.Toprovedecidability,wegiveanalgorithmwhich,givenastructureM
=
(
Agt,
Res,
S,
,
π
,
Act,
d,
c,
δ)
andaformulaφ
0, returnsthesetofstates[
φ
0]
M satisfyingφ
0:[
φ
0]
M= {
s|
M,
s|=
φ
0}
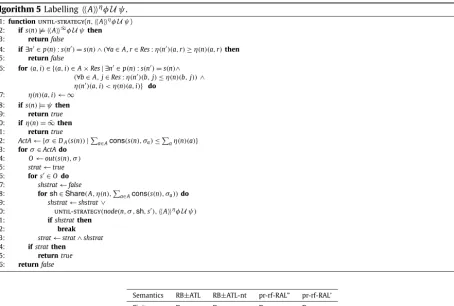
(seeAlgorithm 1).Algorithm1Labelling
φ
0. functionrb±atl-label(M,φ0)forφ∈Sub(φ0)do
caseφ=p,¬φ,φ∧ψ, Aφ, AφUψ, A2φ standard, see [1]
caseφ= Abφ
[φ]M←Pre(A,[φ]M,b)
caseφ= Ab φUψ
[φ]M← {s|s∈S∧
until-strategy(node0(s,b),AbφUψ)}
caseφ= Ab2φ
[φ]M← {s|s∈S∧box-strategy(node0(s,b),Ab2φ)}
return[φ0]M
Given
φ
0,weproduceasetofsubformulasSub(φ
0)
ofφ
0intheusualway,however,inaddition,ifAbγ
∈
Sub(φ
0)
,its infiniteresource versionAγ
isaddedto Sub(φ
0)
.Sub(φ
0)
isorderedinincreasing orderofcomplexity,andtheinfinite resource version of each modalformula comes beforethe bounded version. Notethat ifa state s is not annotatedwith Aγ
thenscannotsatisfytheboundedresourceversionAbγ
.Wethenproceedbycases.ForallformulasinSub
(φ
0)
apartfromAbφ
,Abφ
U
ψ
andAb2
φ
weessentiallyrun thestandardATLmodel-checkingalgorithm[1].Labellingstateswith
Abφ
makesuseofafunctionPre(
A,
ρ
,
b)
which,givenacoalitionA,asetρ
⊆
Sandaboundb,returnsasetofstatessinwhich Ahasajointaction
σA
withcost(
s,
σA
)
≤
b suchthatout(
s,
σA
)
⊆
ρ
.Labellingstateswith Abφ
U
ψ
andAb
2
φ
ismorecomplex,andintheinterestsofreadabilityweprovideseparatefunctions:until-strategyfor
Abφ
U
ψ
formulasisshowninAlgorithm 2,andbox-strategyforAb2
φ
formulasisshowninAlgorithm 3.Both algorithms proceed by depth-firstand–or searchof M.We record informationaboutthestate ofthesearch in a search treeofnodes.Anodeisastructurewhichconsistsofastate ofM,theresources availableto theagents A inthat state (ifany), anda finite pathof nodesleading to this node fromthe rootnode. Edgesin the treecorrespond to joint actions by all agents.Note thatthe resources availableto theagentsina state s ona pathconstrain theedges fromthe correspondingnodetobethoseactions
σA
wherecost(
s,
σA
)
islessthanorequaltotheavailableresources.Foreachnoden inthetree,we haveafunction s
(
n)
whichreturns itsstate, p(
n)
whichreturns thenodesonthepath ande(
n)
which returns thevector ofresourceavailabilitiesin s(
n)
asaresultoffollowing p(
n)
.The functionnode0(
s,
b)
returnstheroot node,i.e.,anoden0 suchthats(
n0)
=
s,p(
n0)
= [
]
andei(
n0)
=
bi forallresourcesi.Thefunctionnode(
n,
σ
,
s)
returnsanodenwheres
(
n)
=
s,p(
n)
= [
p(
n)
·
n]
andforallresourcesi,ei(
n)
=
ei(
n)
−
costi(
s(
n),
σ
)
.Both until-strategyandbox-strategytakeasearchtreenodenandaformula
φ
∈
Sub(φ
0)
asinput,andhavesimilaris falsein the state representedby node n, s
(
n)
.(Note that the state representedby n hasalready beenlabelledby the resource bounded subformulasφ
andψ
.) If so, they return false immediately,terminating search of the currentbranch of the search tree (lines 2–3 ofAlgorithms 2 and 3). until-strategy also returns true ifthe second argumentψ
ofφ
is truein s
(
n)
(lines 8–9 ofAlgorithm 2). Both until-strategy andbox-strategy check whetherthestate s(
n)
has beenencounteredbeforeonp
(
n)
,i.e.,p(
n)
endsinaloop.Inthecaseofuntil-strategy,iftheloopisunproductive(i.e.,resourceavailability has not increased since the previous occurrence of s
(
n)
on the path), then the loop is not necessary for a successfulstrategy,andsearchonthisbranchisterminatedreturningfalse(lines4–5).Ifontheotherhandtheloopstrictly increasestheavailability ofatleastone resourcei anddoesnot decreasetheavailability ofotherresources, thenei(
n)
isreplacedwith
∞
,asashorthand denotingthat anyfiniteamount ofi can beproduced byrepeating theloopsufficiently manytimes(lines 6–7ofAlgorithm 2).Ifallresourcevalueshavebeenreplacedby∞
,until-strategyreturnstrue(lines10–11),sincethebranchsatisfiestheinfiniteresourceversion
Aφ
U
ψ
ofφ
,andanarbitraryamountofanyresourcecan be accumulatedalong thepath.Forbox-strategytheloop checkisslightlydifferent. Ifthe loopdecreasesthe amountofatleastoneresourcewithoutincreasing theavailabilityofanyotherresource,itcannotformpartofasuccessfulstrategy, andthesearchterminatesreturningfalse(lines 4–5ofAlgorithm 3).Ifanon-decreasingloop isfound,thenitispossible to maintain the invariant formula
φ
forever without expending anyresources, and the search terminates returningtrue (lines 6–7).Algorithm2Labelling
Abφ
U
ψ
.1:functionuntil-strategy(n,AbφUψ) 2: ifs(n)|= A∞¯φUψthen 3: returnfalse
4: if∃n∈p(n):s(n)=s(n)∧(∀j:ej(n)≥ej(n))then 5: returnfalse
6: fori∈ {i∈Res| ∃n∈p(n):s(n)=s(n)∧(∀j:ej(n)≤ej(n))∧ ei(n)<ei(n)} do
7: ei(n)← ∞ 8: ifs(n)|=ψthen 9: returntrue 10: ife(n)= ¯∞then 11: returntrue
12: ActA← {σ∈DA(s(n))|cost(s(n),σ)≤e(n)}
13: forσ∈ActAdo 14: O←out(s(n),σ) 15: strat←true 16: fors∈Odo 17: strat←strat∧
18: until-strategy(node(n,σ,s),AbφUψ) 19: ifstratthen
20: returntrue 21: returnfalse
If none of the if statements evaluates to true, then, in both until-strategy and box-strategy, search continues by
considering eachaction available ats
(
n)
in turn.Foreach actionσ
∈
ActA,thealgorithm checkswhethera recursivecall ofthealgorithmreturns trueinall outcomestatesofσ
(i.e.,σ
ispartofa successfulstrategy). Ifsuchaσ
isfound,the algorithm returnstrue.Otherwisethe algorithmreturns false.Notethat the argumentφ
is passedthrough therecursive callsunchanged:informationabouttheresourcesavailabletotheagentsins(
n)
asaresultoffollowing p(
n)
isencodedin thesearchnodes.Lemma1.Algorithm 1terminates.
Proof. AllthecasesinAlgorithm 1apartfrom
Abφ
U
ψ
andAb
2
φ
canbecomputedintime polynomialin|
M|
and|
φ
|
.ThecasesforAbφ
U
ψ
andAb2
φ
involvecallingtheuntil-strategyandbox-strategyprocedures,respectively,foreverystateinS.Inordertoprovethattheseproceduresterminate,wearegoingtoshowthatthereisnoinfinitesequence ofcallstountil-strategyorbox-strategy.
Assumetothecontrarythatn1
,
n2,
. . .
isaninfinitesequenceofnodesinaninfinitesequenceofrecursivecallsto until-strategyor box-strategy.Then, since the setof statesisfinite, thereis an infinitesubsequence ni1,
ni2,
. . .
of n1,
n2,
. . .
such thatforall j,s
(
nij)
=
sforsomestate s (thestate isthesameforallthenodesinthesubsequence).Weshow thatthen thereis aninfinite subsequencen1
,
n2,
. . .
ofni1,
ni2,
. . .
such that fork<
j,e(
nk)
≤
e(
nj)
. Theproof is verysimilarto theproof ofLemma f in[10, p. 70]andproceedsby inductionon thenumberof resourcesr.Forr
=
1,since e(
n)
is alwayspositive,theclaimisimmediate.Assumethelemmaholdsforrandletusshowitforr+
1.Thenthereisaninfinite subsequencem1,
m2,
. . .
ofni1,
ni2,
. . .
whereforallresourcesi∈ {
1,
. . . ,
r}
ei(
mk)
≤
ei(
mj)
fork<
j.ClearlytherearetwoAlgorithm3Labelling
Ab2
φ
.1:functionbox-strategy(n, Ab2φ) 2: ifs(n)|= A∞¯2φthen 3: returnfalse
4: if∃n∈p(n):s(n)=s(n)∧(∀j:ej(n)≥ej(n))∧ (∃j:ej(n)>ej(n)) then 5: returnfalse
6: if∃n∈p(n):s(n)=s(n)∧(∀j:ej(n)≤ej(n))then 7: returntrue
8: ActA← {σ∈DA(s(n))|cost(s(n),σ)≤e(n)} 9: forσ∈ActAdo
10: O←out(s(n),σ) 11: strat←true 12: fors∈Odo 13: strat←strat∧
14: box-strategy(node(n,σ,s),Ab2φ) 15: ifstratthen
16: returntrue 17: returnfalse
whicharesmallerthaner+1
(
m1)
).Hencee(
mj1)
≤
e(
mj2)
.Thesameargumentcanberepeatedtoshowthatthereisanode mj3 inthesequence such that e
(
m
j2
)
≤
e(
m
j3
)
,etc. Hence,if thereis aninfinite sequenceof nodescorresponding toaninfinite sequenceof recursive calls,then there isan infinite subsequence ofthat sequence ofnodes,where thenodes in thesubsequencehavethesamestateandthesameorgrowingresourceavailability.Theexistenceofthelattersubsequence wouldconstituteacontradiction,becausecomparableresourceavailabilityvectorsfornodeswiththesamestatewillleadto terminationafterfinitelymanysteps(sotherecannotbeaninfinitesequenceofrecursivecalls).Toseewhythisisso, con-siderthesimplercaseofbox-strategyfirst.InAlgorithm 3,wheninanodenwediscoverthatpreviouslyweencountered
anodensuchthats
(
n)
=
s(
n)
ande(
n)
≤
e(
n)
,wereturntrue.Sothebox-strategywillterminateafterencounteringjustone pairof nodeswiththesamestate wherethesecond node hasthesame orhigherresourceavailability.Hence, there cannot be an infinitesequence ofcalls to the box-strategy. Consider until-strategy.Given asubsequence n1
,
n2,
. . . ,
nr(where r is thenumber ofresourcetypes) ofnodes withthesame state such thate
(
ni)
≤
e(
ni+1)
,either e(
ni)
=
e(
ni+1)
(and Algorithm 2 returnsfalse)or e(
ni)
≤
e(
ni+1)
withej(
ni)
<
ej(
nj+1)
for some j andone ormore resourcetypes are resetto∞
.Whenall resourcetypesareresetto∞
,Algorithm 2returnstrue.Ineithercase,theexistenceofsucha sub-sequence impliesterminationafterfinitelymanysteps,whichcontradictsouroriginal assumptionthatthereisan infinite sequenceofrecursivecalls.Hence,Algorithm 1terminates.2
Beforeweprovecorrectnessofuntil-strategyandbox-strategy,weneedsomeauxiliarynotions.Letnbeanodewhere
oneoftheproceduresreturnstrue.Wewillrefertotree
(
n)
asthetreerepresentingthesuccessfulcalltotheprocedure.In particular,iftheprocedurereturnstruebeforeanyrecursivecallismade,thentree(
n)
=
n.Otherwisetheprocedurereturns truebecausethereisanactionα
∈
ActA suchthatforalls∈
out(
s(
n),
α
)
theprocedurereturnstrueinn=
node(
n,
α
,
s)
.Inthiscase,tree
(
n)
hasnasitsrootandtreestree(
n)
arethechildrenofn.Werefertotheactionα
asnact (theactionthatgeneratesthechildrenofn).Forthesakeofuniformity,iftree
(
n)
=
nthenwesetnact tobeidle.Suchatreecorrespondstoastrategy F whereforeachpathn
· · ·
mfromtherootntoanodemintree(
n)
,F(
s(
n)
· · ·
s(
m))
=
mact.Astrategy Fforsatisfying
Abφ
U
ψ
isU
-economicalforanodenif,intuitively,nopathgeneratedbyitcontainsaloopthatdoesnotincreaseanyresource.Astrategyis
2
-economicalforanodenif,intuitively,nopathgeneratedbyitcontains aloopthatdecreasessomeresourcesanddoesnotincreaseanyotherresources.Formally,astrategy F isU
-economicalfornif
•
F satisfiesAe(n)φ
U
ψ
at s(
n)
, i.e., F isa e(
n)
-strategyand∀
λ
∈
out(
s(
n),
F)
,∃
i≥
0:
λ
[
i]
|=
ψ
andλ
[
j]
|=
φ
for allj
∈ {
0,
. . . ,
i}
;•
Thepath p(
n)
·
nisalreadyU
-economical,i.e.,∀
n∈
p(
n)
·
n,
n∈
p(
n)
:
s(
n)
=
s(
n)
⇒
e(
n)
e(
n)
;•
Every state is reached by FU
-economically, i.e., for each computation s0s1. . .
sk. . .
∈
out(
s(
n),
F)
and each j<
k≤
i where i is the smaller index such that si satisfiesψ
, sj=
sk⇒
cost(
sj. . .
sk)
0 with¯
cost(
sj. . .
sk)
=
l=j,...,k−1cost
(λ
[
l]
,
F(λ
[
0,
l]
))
;and•
Every state isreachedby FU
-economicallywithrespectto thepath p(
n)
,i.e., forevery computation s0s1. . .
sk. . .
∈
out(
s(
n),
F)
,∀
n∈
p(
n)
:
s(
n)
=
sk⇒
e(
n)
e(
n)
−
cost(
s0. . .
sk)
.Astrategy F is
2
-economicalif:•
F satisfiesAe(n)2
φ
ats(
n)
,i.e., F isae(
n)
-strategyand∀
λ
∈
out(
s(
n),
F)
,∀
i≥
0:
λ
[
i]
|=
φ
;Fig. 2.TreeT andT=prune(T,m).
•
Every state is reached by F2
-economically, i.e., foreach computation s0s1. . .
sk. . .
∈
out(
s(
n),
F)
∀
j<
k:
sj=
sk⇒
cost(
sj. . .
sk)
≯
0;¯
•
Everystate is reachedby F2
-economicallywithrespect tothe path p(
n)
, i.e., forevery computation s0s1. . .
sk. . .
∈
out(
s(
n),
F)
,∀
n∈
p(
n)
:
s(
n)
=
sk⇒
e(
n)
≯
e(
n)
−
cost(
s0. . .
sk)
.Notethatanystrategy F satisfying
Ae(n)φ
U
ψ
(Ae(n)
2
φ
)ats(
n)
canbeconvertedtoaneconomicalonebyelimi-natingunproductiveloops,asstatedbythefollowingproposition.
Proposition 1. There is a strategy to satisfy
Ae(n)φ
U
ψ
(resp.,Ae(n)
2
φ
) at s(
n)
iff there is anU
-economical (resp.,2
-economical)strategytosatisfyAe(n)φ
U
ψ
(resp.,Ae(n)
2
φ
)ats(
n)
.Nextweprovecorrectnessofuntil-strategy.Thenextlemmaessentiallyshowsthatreplacingaresourcevaluewith
∞
inAlgorithm 2isharmless.Fortheinductivestepoftheproof,weneedthefollowingnotion.Givenatreetree
(
n)
,wecall itspruning,denotedasprune(
tree(
n),
m1,
. . . ,
mk)
,thetreeobtainedbyremovingallchildrenofsomenodesm1,
. . . ,
mkthathaveonlyleavesaschildrenintree
(
n)
.Lemma2.Letn
=
node0(
s,
b)
beanodewhereuntil-strategyreturnstrue.Letf beafunctionthatforeachleafnoftree(
n)
returns f(
n)
∈
N
rsuchthatfi(
n)
=
ei(
n)
ifei(
n)
= ∞
( fi(
n)
canbeanynaturalnumberifei(
n)
= ∞
).Then,thereisastrategyF such thatforeveryleafnofthetreeinducedbyF ,e(
n)
≥
f(
n)
holds.Proof. Byinductiononthestructureoftree
(
n)
.Base Case: Lettree
(
n)
containonlyitsroot.Theproofisobviousforanystrategy.Inductive Step: Letusconsider a pruning T oftree
(
n)
.By theinduction hypothesis, anytree T that has alesscomplex structurethan T hasastrategytogenerateatleast f(
n)
∈
N
r≤
e(
n)
forallleavesnofT.Inthefollowing,givennodesn
,
n1,
. . . ,
nk,wedenoteby n(
n1,
. . . ,
nk)
thedepth-1treewhichhasnasitsrootand n1,
. . . ,
nkastheimmediateleavesofn.Letm
(
m1,
. . . ,
mk)
be an arbitrarydepth-1sub-treeof T (see Fig. 2).By removingm1,
. . . ,
mk from T,we obtainapruningTofT.
Letn
· · ·
m·
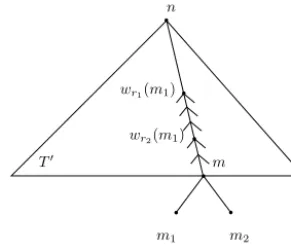
mibeapathinT fromtherootntooneoftheleavesmi.Foreachresourcertheavailabilityofwhichturnsto
∞
atmi,theremustbeanode,denotedby wr(
mi)
,inthepathn· · ·
m·
mi whichisusedtoturntheavailabilityof rto∞
atmi,thatis,wr(
mi)
issuchthats(
wr(
mi))
=
s(
mi)
,ei(
wr(
mi))
≤
ei(
mi)
foreachi,ander(
wr(
mi))
<
er(
mi)
.Wemayrepeatthepathfromwr
(
mi)
tomi severaltimestogenerateenoughresourceavailabilityforr.Wecallthepathfrom wr
(
mi)
tomi togetherwithalltheimmediatechildnodesofthosealongthepaththecolumngraphfrom wr(
mi)
tomi.Eachtime,anamountofgr=
er(
m)
−
costr(
mact)
−
er(
wr(
mi))
isgenerated.Then,theminimalnumberoftimestorepeatthepathfromwr
(
mi)
tomi ishr(
mi)
=
fr(mi)−(er(mgr)−costr(mact)).Notethatweneedtorepeatateachmiforeachresourcerthepathfromwr
(
mi)
tomi hr(
mi)
times.Torecordthenumberoftimesthepathhasbeenrepeated, weattach toeachmi acounter h
ˆ
r(
mi)
foreachr andwrite thenewnodeofmi asmhiˆ(mi).
Initially,h
ˆ
r(
mi)
=
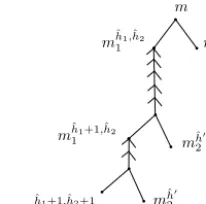
0 forallrandforallnodesmi.Astep(seeFig. 3)oftherepetitionisdoneasfollows:letmhiˆ(mi)besomenodesuch thath
ˆ
r(
mi)
<
hr(
mi)
.Letmˆ
h(mj)
j bethesiblingofm
ˆ
h(mi)
i (j
=
i).Weextendfrommˆ
h(mi)
i thecolumn
graphfromwr
(
mi)
tomi;eachnewmj(j=
i)isannotatedwithhˆ
(
mj)
(sameasbefore)andthenewmi isannotatedwithh
ˆ
(
mi)
exceptthathˆ
r(
mi)
isincreasedby 1.Werepeat theabove stepuntilhˆ
r(
mi)
=
hr(
mi)
(it mustterminateFig. 3.Repeating steps to generate resources.
Fig. 4.w(m)ofmintree(n).
At theend, weobtain atreewhereall leavesmhiˆ(mi) haveh
ˆ
r(
mi)
=
hr(
mi)
forall r,hencethe availabilityofr isatleast fr.LetE
(
m)
betheextendedtreefromm.Let FT be the strategy generated by T. We extend FT with E
(
m)
for every occurrence of m in FT such that s(
m)
=
s(
m)
,anddenotethisextendedstrategy FTE.Forallleavesmin E(
m)
other thanmi,letsub(
T,
m)
besomesub-tree of T starting from a node m such that s
(
m)
=
s(
m)
. Then, we extend FTE with sub(
T,
m)
for everyoccurrence of m in FTE. We finally obtain a tree FT which satisfies the condition that all leavesl have resource
availabilityofatleast f
(
l)
.2
Corollary1.Ifuntil-strategy
(
node0(
s,
b),
Abφ
U
ψ)
returnstruethens|=
Abφ
U
ψ
.Lemma3.Ifuntil-strategy
(
n,
Abφ
U
ψ)
returnsfalse,thenthemthereisnostrategysatisfyingAe(n)φ
U
ψ
froms(
n)
thatisU
-economicalfor n.Proof. Weprovethelemmabyinductionontheheightintherecursiontreeofuntil-strategycalls.
Base Case: Iffalseisreturnedbythefirstif-statement,thens
(
n)
|=
Aφ
U
ψ
;thisalsomeansthereisnostrategysatisfying Ae(n)φ
U
ψ
froms(
n)
.Iffalseisreturnedbythesecondif-statement,thenanystrategysatisfying
Ae(n)φ
U
ψ
froms(
n)
isnoteconomical. Inductive Step: If false is not returned by the first two if-statements, then, for all actionsσ
∈
ActA, there exists s∈
out(
s(
n),
σ
)
such that until-strategy(
n,
Abφ
U
ψ)
(wheren=
node(
n,
σ
,
s)
)returns false.Byinductionhypoth-esis, there is no strategy satisfying
Ae(n)φ
U
ψ
from s(
n)
that isU
-economical forn. Assume to the contrary thatthereisastrategysatisfyingAe(n)φ
U
ψ
froms(
n)
thatisU
-economicalforn.Letσ
=
F(
s(
n))
,thenσ
∈
ActA.Obviously,foralls
∈
out(
s(
n),
σ
)
, F(λ)
=
F(
s(
n)λ)
isaneconomicalstrategyfromn=
node(
n,
σ
,
s)
.Thisisa con-tradiction;hence,thereisnostrategysatisfyingAe(n)φ
U
ψ
froms(
n)
thatisU
-economicalforn.2
Corollary2.Ifuntil-strategy
(
node0(
s,
b),
Abφ
U
ψ)
returnsfalsethens|=
Abφ
U
ψ
.NowweturntoAlgorithm 3forlabellingstateswith
Ab2
φ
.Firstweshowitssoundness.Lemma4.Letn
=
node0(
s,
b)
.Ifbox-strategy(
n,
Ab2
φ)
returnstruethens(
n)
|=
Ab2
φ
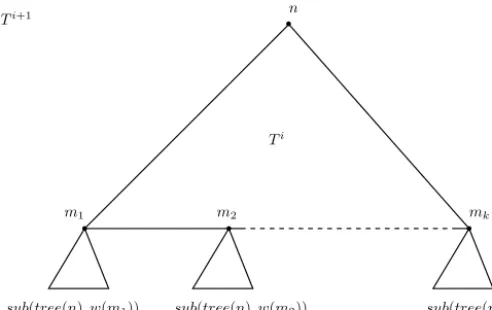
. [image:8.561.203.345.194.285.2]Fig. 5.One step in constructing the strategy.
Letusexpandtree
(
n)
asfollows:•
T0istree(
n)
;•
Ti+1isTiwhereallitsleavesmarereplacedbysub(
tree(
n),
w(
m))
(seeFig. 5).LetT
=
limi→∞Ti,thenT isastrategyforAb
2
φ
.2
Lemma5.Ifbox-strategy
(
n,
Ab2
φ)
returnsfalse,thenthereisnostrategysatisfyingAe(n)2
φ
froms(
n)
thatis2
-economical forn.Proof. Weprovethelemmabyinductionontheheightintherecursiontreeofbox-strategycalls.
Base Case: Iffalseisreturnedbythefirstif-statement,thens
(
n)
|=
A2
φ
;thisalsomeansthereisnostrategysatisfying Ae(n)2
φ
ats(
n)
.Iffalseisreturnedbythesecondif-statement,thenanystrategysatisfying
Ae(n)2
φ
ats(
n)
isnot2
-economical.Inductive Step: Iffalseisnot returnedby thefirsttwoif-statements,forallactions
σ
∈
ActA,thereexists s∈
out(
s(
n),
σ
)
suchthatbox-strategy
(
n,
Ab2
φ)
(wheren=
node(
n,
σ
,
s)
)returnsfalse.Assumetothecontrarythat thereisastrategy F satisfying
Ae(n)2
φ
froms(
n)
thatis2
-economicalforn.Letσ
=
F(
s(
n))
,thenσ
∈
ActA.Obviously,for alls∈
out(
s(
n),
σ
)
, F(λ)
=
F(
s(
n)λ)
isastrategy2
-economicalforn=
node(
n,
σ
,
s)
.Thisisacontradiction;hence, thereisnostrategysatisfyingAe(n)2
φ
froms(
n)
thatis2
-economicalforn.2
Then,wehavethefollowingresultdirectly:
Corollary3.Ifbox-strategy
(
node0(
s,
b),
Ab2
φ)
returnsfalsethens|=
Ab2
φ
.4. Lowerbound
Inthissectionweshow thatthelowerboundcomplexityforthemodel-checkingproblemforRB
±
ATLisEXPSPACE,by reducing fromthereachability problemofPetriNets. Notethat theexact complexity ofthereachability problemofPetri Netsis still an open question (although it isknown to be decidable andEXPSPACE-hard, [10]). The exact complexity of theRB±
ATLmodel-checkingproblemisalsounknown.NotethatanupperboundfortheRB±
ATLmodel-checkingproblem wouldalsobeanupperboundforthereachabilityproblemofPetriNetsduetothereductionbelow.EvenanAckermannian upperbound forthis problemisstill open [11].This suggeststhat determiningan upper bound fortheRB±
ATL model-checkingproblemisalsoahardproblem.APetrinetisatupleN
=
(
P,
T,
W,
M)
where:•
P isafinitesetofplaces;•
T isafinitesetoftransitions;•
W:
P×
T∪
T×
P→
N
isaweightingfunction;and•
M:
P→
N
isaninitialmarking.A transition t