TWO TOPICD I:N '1'HE THJi:ORY Olil OPTIMAL TH,A,JE:C'J.lOHY J\NJ\INSIS
by
G.H .. IJ\WDEN
Two 11opi.cs in the ~:1heory of Optimal Trajectory .Analysis By
G .. H.. I.~awden
P.ART I ~ Review of Basic Theory. 1 .. Introduction ..
2, The Mayer Problem.
PART II - Trajectory Optimization f'or a Rocket with a Generalized Thrust Characteristic.
1 .. Introduction .. 2. General ~rheo:ry.
3 .. 'rh.e Constant Pield.
J.~ .. ~rhe One Dimensional Case ..
5 .. Sounding Rocket ..
6., The Constant Power Case ..
7. Further Consid.erations ..
PAR'l' III ... Optimal 'l'raj ector•ies f'or ·a Solar Sail Vehicle .. 1 .. Introduction.,
2 .. It'orce on a Reflecting Surf'ace.,
3 .. It'light in a Unif'orm Field ..
!.~., Inverse ~1quare Ii'ield . ., The gquations of Motion ..
5.. Boundary Condit ions"
6., MinimtUn Time ].flight ..
7• 'rhe Weierstrass Condition.
B.. Zero Order Solutitin.
9. An Approximate Solution Satisfyi!l{:S the Bound.ary Conditions .. 10" General Conic Solution.
11 .. The Three Dimensional Pr•oblem. 12., Some Numerical Results ..
P.ART I
1 • Introd.uct ion
The work pl:lesented in this thesis is conoevned with
certain problems in the domain of optimal trajectory analysis. The general problem in this field is to determine the 'best' way to use a certain travel vehicle to carry out some
particular mission. Thus our vehicle may be a rocket which is designed to operate with constant exhaust velocity or at
constant powei'. Our mission may be to ef'teot a transfer f'rom the orbit of' the Earth to the orbit of some destination planet within the solar system. And our criterion, for judging which manner of' utilizing our travel vehicle is 'best' may be the requirement that the fuel consumption oJ:l the tr•ansit .time be ·minimized,
The work which follows consists basically of' thvee parts. In Part I the well kn.Own problem in the Calculus. of Variations known as the Mayer Problem is outlined, since this is the basic mathematical tool which will be used in Parts II and III. In Part II an investigation ia made of' the thrust programmes
obtained when the t:b.rust characteristic o£ a rocket is of' a more general nature than the constant exhaust velocity thrust charac•
te~istic which, for instance, is assumed throUghout in [1]. It ie shown how well known results for the case of' a rocket
operating at constant exhaust velocity may be obtained as limits of the more general results obtained in that part. Also, the
the one dimensional case. In Part III- the travel vehicle considered· is the so-called • solar' sail • • The thrust tor this vehicle is derived from the radiation pressure of the solar radiation reflected from the sail sur:f'ace. For a vehicle of this type, the question of minimizing f'uel consumption does not aro once the vehicle has been assembled in epace1 so that the
payoff criterion of most interest will be minimization of transit time. A more detailed conspectus of' the problems considered and the results obtained is presented in the separate introduotions to Parts !I and III.
A basic tool used in tackling problems of trajectory
optimization is the solution to the Mayer Problem in the
Calculus of' Variations. Following section 1.3 of [1], we out-line first a forornuletion of the Ma;ye:f:l problem wh:tch is
also anothel:' formulation of the Mayev :pvoblem which will be au.ff'iciently general to meet the requirements of' section 1 0 of
Part III.
The .first :eo:~Jmulation of' the May~~ pl~oblem :pro<~~'iH!Ids as follows. We are given n first order dH'ferential equations
(1 )
to be satisfied by thf.} n function .tt
1(t) (i=1,e, ... ,n), known as the §,..t!!ll,te Vftltia,bJ.,9i1 e.nd m :C'Wlotions aj ( t) ( j
=
1 12, .. •., ,m), knowni~atives with respect to an independent va.riable t. i.£lhese equations are ·to be valid.
f'o:r- t0
<
t<
t1 and the'\J
are de:f'ined throughout thiiJ iut.Gx·val as continuous functions apart f':c-om a f'inite number of finite continuities., The initial values of the xi at t=
t 0 arespecified by the equations
x:i
..
=
;xio • The :J;'unctions O''j (t) and x1 ( t) are req'ttil"ed to satisf'y certain constraining equations
(2)
(3)
where k
=
1 ,2~ •~> • •P < m and the gk a:re continuous and :possess continuous pa.r·tial cler:Lvati vee of su:ff'iciently high ovder in all their arguments. The of certainand g
<
n. The control functions are arbitrary within thelimits impo~ed by equations
(3),(4).
The existence of control f'unotiona satis.fying the constraints(3),(4)
will be assumed.Let '~q+
1
, 1 ,:x;q+:a,i ; "•.
,xn1 be the valuescrt:
the ~iat
t
=
t1 not fiXed by the constraints (4). TJJ.en our problem is to find (lGrtt:r,>ol .functions «j determining the xi so that the constraints (3), (4) are satisfied and also so that a given functionalis minimized, where t 1 ma;v o:P may not be pre specified. J is supposed to be continuous in all its variables and to possess continuous pal'tial derivatives of' auf.ficiently high order.
We
introduce cel'tain auxiliary functions A1
(t), ~k(t) known as Last&nge mult}J2lier.s and a quantity F known as the Lagrapg~eXJ.?;reasipp. defined by the equation
where we have adopted the 1J.SUal smnmation conventions indices
repeated in a produot imply summation o~er the range of the
ind~x. We are now able to state first necessary, conditions fo:tl
a minimum of J.
At poin;ts whe~e the aj are continuous, the Le.g:t•ange
multipliers ~ ,JJ.k must satisfy the dif'terential· equations
and the equationa
For the so-called no:rmaf.. ,l2~oble~ we e,lso have boun.dal'y
conditions of the fo~m
a
=
q+1,. •. ,nEquntiona (1 ), (3)1 (7), {8) :provide a set of 2n+ m+ p
(8)
(9) (1 0)
equa:t:i.ons be isf':i.ed by the same number of :runotions xi (t),
aj(t),A1 (t),JJ.k(t)., Eq_uations (2), (4), (9), (10) provide 2n+1 end co:ruli tiona which ser·v~ to determine the n constants "io, the n
constants of integration associated with the differential
equations ( 1 ) and the end point \ •
At a. col;lnen:- on an opt~.mal trajectory~ where some or all of' the a~ discontinuous, we may apply the Weierstrass•
Elrd:mann Corner Conditions •. These state that at a corner, the
Lagrange multipliers ?\i and the expression "i*i must all be
continuous.
A first integral of equations (1
),(7)
exists when thefunctions :ri,gk are not explicitly dependent upon t. !t is given by the equation
1\i:X:i
=
constant. (11)that :ror• a minimmn of' J, the inequality
must be satisfied a.t every point on the minimal t!'ajeotory, J:n this inequality, the quantities "-:t,xi ttef'er to the minimal
•
trajectory., while the quantities
Xr
al"'e any set ot values of tll.ex
1 obtainable :f'rom equatiQns (1) by substitution of the minimalvalues of' the xi and any set of values Aj of' the cxj consistent
with the constraints
(3).
The second formulation of' the Mayer problem which we give
dif'f'ers f'rom the first mainly in treating more general boundary conditions,. Also, an explicit distinction between state
variables and control vBPiables is not made. We consider rl
unknown f'unctions x
1(t) (i= 1,2, ••• ,n) of an independent variable
t, which are to be def'ined for values
ot:
t
extt:md:i.ng over• the range t0 ~. t<
t1 • 'l'hese functions have to sat:i.s:Cy the ill f'irst order dif':f'erential equations(13)
where the Kk {k ::: 1 ,2,."' .. ,q) nr•e q par•ameters whose valUes a~e
also l;tn.known~~ The ve.lues taken by the function x1 (t) at the end
( 1 ~)
It is ~equi~ed to choose the funotiona xi, aubjeot to the
oonet:rainte ( 13) and ( 14) , the end points t0 , t1 , and the. values
ot the ~ek11 so that J is minim12:ed.
tset "1 ,'A2 , • • "''"m denote Lagl!'ange multiplie:re depending upon t and to be dete:rmined subsequently. Let F be the function defined by the equation
(16)
I"""t
v,
;V:a, •• , ,vp be oonat.ant multiplie:ra, al.so to ·be deter-m:i.nedlate:r and define H bY the equai;i.ont
( 17)
'.Phen, the f'\l.nct;tona ~:" ), which minimize <1 necessarily aatisf'y the
s<:Joond order d:t:f'f'e>:erd;:tal equation$
(18)
Also, at the end points t :111 t0 , t :::::: t
1 ,
:t
t is necessarythat
1$
o,
( 19)=
o,
(20)( 21)
(2.'3)
Togethe~ with the m constraints
(1,)
1 then Eulerequations 11 (equations( 1.8)), wh:Loh are of the second orde~ 11
dete~mine the m+n functions
x
1,A
1 , apart. from 2(m+n) constantsof :tn.teg:ration. The ( 2n+q+2) equations ( 19) ... {23), togethe:r with the p constraints (14) and the 2m equations obtained by
setti:P..g t ;rt till• t =! t1 in equtJticms ( 13), c:l.etermine the p oon•
stante v11 the end point~ t 0,t1 11 the parameters ~·and the
2(m+n) constants of integration~
. The Weierstrasa-Exodmann o<>:rmer conditions state that the
following expressions shall be contin.uc,ue at ~Zt o.iscon·c;i.nuity in
*i
~(24)
Lastly, . writing
(25)
it may be shown tha~;' it' the
rpj
are not explicitly dependent upon t 1 we have a first integral given byK lt;:i constant .. (26)
Gonneated wi'th ·the above reaul ts there are, of' cou:rse,
cer>tain analytioal conditions which nruE.rt be satisfied by the
:f'unct:tol'lS ~j etc .. in ordel" that the z~eault~ quoted oan be
These matte~s a~e considered in detail by Bliss
[3].
REFERENCES
1. Le1wden• :P.F .. 'Optimal 'J':t"'a.jeoto!"iea :f'ox~ Spe~.ce Navigation'.
~. .
Butterwor·ths Mathematical 'J:exts •' 1963.
2. Lawdon, D .111. • In·tarpl~nettl,t'Y ncoket Tr•ajectr:>ries t.,
Adyancas ,,Jn,. !ilJ21Q.§ S..QJ._e:(l.Wlt Vo1.1, New Yottk1 Aoadem.io Press"
3 • Bliss, G .. A. 'Leotures on the Calculus o'f: Yl'£,riations•.
P.ART II
9:'RAJ]i~QTORY OPTIMIZNriON FOR A ROClillT WITH .A
t j s developed in some 1 El r•o
chtu:-acterist:tc
f =
sm.
M,
( 1 .1 ):f is the on of' the to motor
thx•us t , e :l a t ll.e t velo ty (an constant)~ is
mass of' the ro m is the of'
d.ef' by
( 1 .. 2)
that of' arc OCCUJ:•
an optimal tx•ansf'e:t~ pro blern;
i .,'!:.) arcs. t D.
corne:r• :necerH3
cm:ldi t sitione of
culty,.
ch to tldn thig t,
is ic is
f'
=
krnV/M,k v H.re cortstants o~pt
trajectory consists eit I.. • ar•c (
bomlded) and there ar•e no corner•s, or it consiet of' .r,,,
that the imal trajectory cone ts o:t' a I .. ~e arc
v
is in 0 < v < 1., The tothe unif'or·m tat i.on
values o:r v ly le8s tha.n
unj.ty .. exact solution obt v
in 0 < v < 1 the case ro
obtaln he
:i.B :ir:1 that on 11 t;v co on
at COI:;;t i
istic
In a unil'orm lonal time
arc ty:pe1C.:> ic (1 .. 1)
:roesultn .. ionn.l 0
the order of' the !':H"'CS jo . u not
sit ions of' C0l'Xl01'8 f'Ol' thE) i
( 1 .. 1 ) inc1i co. by lett v -i> 1 :tn the ~~olut
.more t ic (1 .. 3) ..
f.' as clef'ined. by t (1 .. 3) as our
clta:PHctex•i stj. c not t be w!• ten j.n the
if'
to eguat
:v
icular,v ~ '£if .l \'16 may
thrrt ·
to
ttcn
tion ( 1 .. 3)
s
v ;::: 1
e
V -1
c = km ..
the
i+
ion ( 1 .. 2) •
cquatic)n
+ - 1
=
o ..
city s
ct
s of"'
ro
..
(2.1 )
velocity
(2.2)
..
tcona
rnotion
(2 .. 3)
JGhe ro t an
COt:l a <"
,
xi a1•e the
is cnnvenie:nt ce i it :t• )
- "'a ~ :::.: 0
.
(2.7)
we s contx•ol
i
in t
[3], is
1? - ". l (:t•-e.. l ) +
+
(r-to characte:t• c :lo:ru::.:;
(2 11) (2 .. 12) (2 .. 13)
),
It follows f'rom eguation (2.,13) that the tht•uet must always igned with a vector having components 7\1 which,
llowing [3], v1e shall to as the prime:t:• This
sati the ion
(2.17)
as can be seen by elimint:-lt (2 .. 11 ).
gquat (2.16) s that a or• 11
3 must vanish .. 0: s, the ar·c under consideration be one null
or thru.E>t.. If' Jl
3 , the arc may be one of'
inter-mediate
But; :f'rom
and. equation (2 .. 15) will clef'ine /l
2 ..
IL between (2.12)
r-,,
~
on (1.2), this may be written
upon inte,gration, this y1elda
whei"e A is a constant.
(2,,18)
(2.19)
(2.20)
In t.he eciaJ. case the problem is to transf'el" the
M = ~-n
l\11 at the f'inal time
·c
=min.imizlng M1 f'o:t:• either v<1 or in [3), we :t'ind that this leads
at
t1 • This
v>1.
to the end
t ;::::: t .,
1
is equ:lvalent to
equation (1 .46)
condition
(2.22)
Compa.ring equations (2o20) and. (2. ) we see that
(2. )
, since all 'A
1 are continuous em
the oornei' condition, we see :from equaticms (2., ) and (2,. )
that the equation
is true over the whole jectory.
I:f' v
=
1, equation (2 .. 21) om1.n.ot apply and we I~inimizeinstead
(2 .. 25)
1
This also yield.s A
=
1. Hence we can assume A=
1 under all(2,.26) e the starred quantities are trary values of the control vari e.bles sat i the constrairfu ( 1 .3) ant!. ( 2.
7),
and the corresponding u:nstarred quantities are optimum values ..But frtlm aqua t ion ( 2. 20)
which from ion (1.3) gives
(2.27) examine icularly the case minilnizat ion of propellant expencli ture for which, by ion (2. }, we may take A= 1 .. Substituting equation (2,27) into condition
Since the vectors A.1
,-e
1 a:t•e aligned~~
~oJ:• varh:tble i when the vec;tol."'B Ai ,-ei al:'e aligned, we see that this iniJ.?lies
p:t'• k-(1/V):f'1/V ) pf*""' k-(1/V (1/V)
where p is the magn:i.tude of' the prirne:t• vecto1• 'A1 .. now def':tne a :t'unc·tion
~~· (:r)
=
p- .L (f/k)(t-v)/v· kv '
T" (f')
=
P'V2 V-1 (f'/k) ( 1 -2V )/v • ( 31)The behaviour of' function T (f') dif'i'erent of' v easily deduced f'rom these equations ..
rl'(O) ::: 0 (2.32)
T9 (0)
= ...
oo; v > 1;
=
p .... 1/kt ( c:.a f') )=
p,By considering the behe.viotlt' of' T" (:f'), we can now t
the the f'u!lction T(f'). 1 the of
T (f') dif'f'e1•ent t•anges of' v.
Now i ticn:t (2 .. 28) may written
""'~
(2 .. 34) •r (f') ~ •r(:r" )
,
so that optimal o:f' f' is that ch a maximum
-'<,.l
of' T (:r'· ) .. cons dif'f'erent x•anges v ..
a) v > 1
]1rom liligure 1 we see
=
terms of' pr:i.mer magnitucle .P; re may be ten
p > (:f/k) ( 1 -v )/v 'I'., arc ..
p <
1
('F/k) ( 1 -v )/vN" '1'" arc ..
k
p :::: ('F/k) (1 -v )/v T .. ox-- T .. arc• in no case can acceleration
-assume any intermecUate between :f'
=
0 :r = f'.. There are no I" 'I' .. a:t:•cs ..b) v =:: 1
p > 1/k ax• c .. p < 1/k N,/l:., arc ..
p
=
1/k places no re iction on f' ..I.T. B.rcs are accordingly not excluded in this case ..
c) 0<V<1
From 1 we see that for opt
conditions
But 1"y is dete:t>mined by equating T + (f') to zero. 'J'hus :f'rom equation (2 .. 30) we
and the imal ion is by
(2 .. 37)
·which yields a unique acceleration programme terms of' p., = oo1 then E11:'CS are
r.T
t:U•cs.. Clearly!! innull-thrt.tst arcs are not an optirnal jectory
( in the exti•eme case p identically zero ov·er a
:t'i:ni te period time) ..
by ion (2, ) be put in a more convenient f'orm by introd.ucirl[~ the able
so that
s - .,JL_
Equa.t (2 .. 36) may row
where
we have vvdtten f'
v
=
+Stton s
:r
=
krJ(kp) ,( )
(2"h0)
(2 .. 4.1)
we that fiB
s -+ +
co,
v -+ 'I 0 ?]-+1/e..
1Ne can therefore thethe case, v::::: 1~ by the limit:i.ng
beha.v:loul~ case 0 < v < 1 ..
th:'i.s l3ection; ·we exe.mine: corner condition
and a appropriate to th.is It EJhown
[3] that at a corne:t• connect
the qus.r1t it From equation
,
(2 .. 10), we see that this that • and /\7 are inuous so that vector is a continuously quantity ..
remaininft; s-Er•dmann corne1• condition states that
continuous at B. corner.. Bubstituting the ivatives
f':t•om equations (1 .. 2), (2 .. 3), (2 ..
id
and remembering that /\1,1\ are continuous
i+;s
be continuous
a corner, we Bee that
ever•yvvhere111 In par•ticular, when I' is clei'ineu. by equation (2,L~0)111
we see that f' must be continuous everyvifhere so that there ar•e no corr.1.ers on an optimal tra;jectory.. rrhe continuity of' T(f') accordingly yields nothiil,g new..,
It :t•emains to consider the f'omn taken by the f'irst integral
l~'
=
constant (2 .. !1.4)which in [3] is shown to exist when the g:t•avi tat:i.onal f'ield ·is time invariant .. Bubstitut J:'m:• the derivatives f'rorn equations (1 .. 2),(2.3),(2 .. LJ.) and using equations (2 .. 10), (2,27) and (2.29), 1.Ne :rind that thi8 yielchJ
+ T(f') = constant.
On an inter•mecHate th:r•ust arc I'o:p 0 < v <1, the accele:t•a-tion is given by equation (2 .. 1.~0)., Substituting this value of'
:r into equation (2 .. 1!5) and using equation (2.,29), the :first integ:Pal becomes
11 ( )S·I-1
+
stf
kp=
constant,which is the :fir~st integral expr•essed entirely in terms of' the magnitude of' the primer"' vector ll•
will no'\v r•estrict ouT•selves to the case
to values of' H in the
F1or a constant gx•avltational , all the f':leld
nents g
1 are constant and n (2 .. 17) the solution
s. ~rhe locus thez•
a 111 b 1 are
straight we can choose axea that primer vector
of'
can
plane. In vector
at mo , one m:i.nimum,.
ar•e intere steel by the equatj.on
the case
assuming that :f' it::~ not bounded above.o
tude
then
the ion
equations of' motion :f'or the genei•al s•case are too It
complex to solve licitly; however the case a
=
1 d•)es admitan cit solution. rrhis corresponclfJ to flight constant
It of interest to examine the behaviour of' :f' as s~ o'J;
since this approaches the case v
=
1 <~~(3 .. 5)
the of a
1,b1 upon s will be decided by the boundar•y concii tio:ns.. Suppose that
'rhen
{:3 .. 6)
as s ~ oo; and, for certain behaviour :r(t)
s of' P, we can d.~;:duce the limi t•
equation (3.h),
(i) P < 1 /k, f' ( t ) -+ 0 as s ~ oo ,
( :i.i) P:>1/k, f'(t)-+oo as s-+oo ..
Clearly, we cannot an :inf'ini acceleration e.
time; we asswne t
p ~ 1/k .. (3 .. 8)
Sutrpor:~e that the primm;• vector tendrJ the limit
(3 .. 9)
\*there
o ..
a segment a sirt"lightline ins a cir whose is at and
whose radius is 1/k. Only if' the segment has an end int
an i limi
ial boundary conditions, we may have only one impulse o~
even no impulses all.
We must now examine the case where
We see that
as a-+ oo S.!ld hence p ..-. B, a constant. It' B > 1/k, this would :imply int'inite aqoele:ration everywhere • If B < 1/k; the whole
arc would be one ~f null thrust. Hence, in general
By equation· (,3.,!~) the limiting acceleration programme takes the form
where t -tF as s ..+ oo.
Now
(1)00 is an indeterminate form. Its value will dependupon the manner in which p-+1/k. Suppose that, in tact, equation
(3•1.3) yields a definite limit prog,amme l!'( t),. Then; from
i•
(3•11), we see that the thrust isi'Oonstant in direction through• [;
out the manoE;n.tvre • Because
ot
this, there will be an in:fini tenumber of' other progreunmes which will lead to the same values of'
,lv
values of u close
to
1.The results obtained above correspond with the known results tor the case
v
=
1 as obtained in[3).
4,
441
Ope .... D:Lmen[Bigru;l OaaeFor the case of rectilinear motion along an x•axis, the primer possesses but one component given by
The sign Of
A
detevmines the sense of the thrust along ox. Theprimer magnitude is now simply
Using equation (2 .. 40) the equation of motion (2.3) becomes
(4.3)
We Will oonsidev the sequence of oases where s is of the form
Equation
(4.3)
becomesWrite
a
=
kat, b II: kb9 ,.(4.7)
We will study the optimization problem
:eor
a rocket \'Jhose motor charaoter:tst:to is approximately normal, i.e, we shallassume n to be large.
We take as our general boundary conditions
X :::: Xo; v =
vo,
at
t = to,(4.8)
X IIi::
x'l •
v
m v1,
at t =t
1•
l:t will be convenient also to introduce the notation
-
x=J!;-x0 ,....
v
=
v
1 ...v
0 ,We tind, on integrating equation
(4•
7) twiQe and insertingthe given boundary conditions,
that
and
These are the equations determining the constants a and b. We define the parameter ~ by the equation
from which we will :r;-eg.uire the l'esults
(4.14)
(4.15)
Substituting for at + b. from equation (1.~.12) into equation
'I
(4.10), we obtain
(4.16)
where we have used equation ( L1 ... 1;)).
Similarly• substituting from equation
(4 ..
12) into equa-l!(4.11), we ha:v·e
-
x- v0(4.17)
We may now eliminate (at
0
+b)~n+1 bet\veen equations (4.16), (4.d 7) to obtain an equation tor f3, nameiy- · Vi''"", g~ tiJ.n+.~ ... ·· .. c. 2 ... lH3)fJ + 2n+ ... 2.
i ...
v.0 t - ~gt2 = · - - - - -- --- •2n+3 {(32n+~ ... 1 ) (t:J•1) · (4.18)
A
:;= ( n+f)<r+1) ... 1 ,
B =:
(n+
i-)(Y•1),
L(p) ~ ~2n+2{A(~1)-1
1,
R(f3) :; B(f:l""1 ) ...,. 1 ,
(4.~0)
(4.21)
(4.23)
(4.24)
which era the left and :t'ight hand members respectively of'
equation (4.19) may IlOW be sketched in ordETJr to locate the
roots
oi
equfiit;Lon (4 .• 19).. The nature of' theroots varies
according
to
the valueof
the function yof the
boundary oondi•tiona. l~ all oases, however, it is easily shown that L(f3) and
n
(;3) are tangentialat
(9=
1.We will treat two distinct oases
to
show thetwo types o:r
limiting behaviour which oan occur as n-+oo• We will then
summarize the 'behaviour :f'or all oases.. We :f'ivst note, however,
that y can be e~pressed in terms of
two
functions of theboundary condition which have a clear physical interpretation
and Which determine in a e:hnple mannev the types of roots ot
equation (4•19) which are encounteJ:>ed.. We define two pal"ameters
4
0
=
i~ (v0 1+igt 2) , (4.2~)
A is the difference between the distance whiCh is required
0
to be covetoed in the set titne and the distance which the
J?Ock:et
would
travel without motor thrust in the set time start ....tng
with the given initial velocity. A1 has a similar:i.n.terpretation.,
We note
that
(L~. 27)
(4.29)
Case It y > 1
This corresponds to two separA,te classes of boundary
conditions, viz.
( i ) A0
>
A1>
0,( ii) A0 < 61 < O,
We see rrom Figure 2 one real root for /3, other than double root at Q( 1"-1 ) eor:reepond1ng to
the value f3
=
1 which we have excluded in deriving equation(3.1·9). (This case will be considered later; it can only oeow under special boundary ' ' . conditions ... ) The unique valid root has abscissa -1+ e, where e: is small and positive when n is large •
.Asswning fJ can be expanded thus,
(4.30}
ituting into equation (4.19) and equating terms of O(n)
both members~ we obtain
whence
which gives an estimate £ to 0(1/n).
t'rom equations (4.31 ),(4.30).(4.28) and (4.16), we get to O(n).,
Thus, f'rom equation ( 4.7) we
whe~e
is a dimensionless time te~m which va~ies £~om T ~ 0 at t ~ to
to
r
=
1 at t.=
t1 •Certain properties o:f.' the accelerat5.on. pl .. og~amme f'or large n can be deduced from equation (4.34). li'irstly,
and
The last .result follows f'rom equation (L~ .• 31). Also, for 0 < T < 1,
i.e. intermediate values of' t, V-+g as n-+o:>.
Thus, f'or large n, we ten.d to a situAtion where we have !~pulses at eaoh boundary and a null thrust arc in between. The impulses at t
=
t0 and t=
t1 are proportional to the quantitiesll0 and LA1 l:.lespectively,.
The velocity; obtained by integ~ating equation (4.34), may
be written
giving, ·to zero order,
an.d
v = v0 , at t
=
t0 ,(4.39)
Integrating equation (4 .. 39) with respect t~ t :f'rom t 0 to t1 and putting x
=
x0 at t=
t0 we can verify that, with this velocity programme, attain at t = t 0,. It clear:, therefore, thatthe initial impulse adjusts the velocity such that the !locket subsequently coasts to x
=
x1 in the preassigned time interval.,. wherE-' it receives a second impulse suf'tieient to give it the preassigned boundary velocity v1 •
The programme clearly tends to the we11-known double impulse
Case II: 1 > y > 0
This corresponds to two separate classes of boundary conditions
(1) 60 > il1 ,
{ii) il
0
<t\
1A1 < 0 < il1 + il0 ,
A >O>il +A 0.,
1 1 '
From ],j't:f.g~e 311 we see that the oruy- root. other than the
excluded double root at {3 = 1• may- be vtri tten
whe:re
e
.·is small and positive.and s'Ubstitut:1ng in equation (4.19 ), we , working to zero
o.rder in· that
Now,
:an )
(1·~ /n) """exp(-2a1 ,
Thuth to zero order, equation (4.42) becomes
•
(4.44)
By sketching the graphs of the two members of' eqtiation
(4.Lt4), . we find that there is
a
zero root and a positive l"ootfor a 1c. Now the 'Value of the root of equation (4.19) lies
between two other 'Values ot: fJ which are easily estimated, namely, the value for which R.(/3) vanishes and the value which L(/3) has a point of' in:f:lect1on. From this observation, and working
to 0(1/n), we can arrive at the inequalities
zero in the r'ange of y consider'ed. We there:fol"e diseard the zero root of ion (,3.44) and take the positive root.
Using equations (l+eLt.1 ) , (4.42), we find that working to
zero oztder in n, equation (4.d6) gives
Now, using ions (4.46), (4.44}, (4.14).(4.15); we find .the
acceler-ation, as gi,ren by equation (4.,. 7);. may be written
, lm"'ge n, the optimal aecele.ration proJ:Iramme is
given by equation
(4.44).
As n..,. co, the optimal programme will tend exactly to equation
(4 .. 47)~ Hov.rever, in the limit, when 11
=
1; the pPogramme (4.47)will only be one of' an inf'ini te number of equally optimal progra1tm1es satisfying the boundary oon£litione. a unique optimal p:r«<gramme :ro.v the case v = 1, the progx>arnme (4.47) is
theref'ore spurious.
In equations
(4.5)-(4.7)
of Ref'. [.3] we have conditions the existence of an I.T. are the case V=
1 in a uniformfield• Using the notation established in this section. these
6.0 =
keJ"'
1log dt, (4 .. 49)to
vthere
e
±1 along the entire trajectory. Equation {4.48) may be writtenA0 -A,
=
uJ;
logt
Q.t0
(4.50) and now; from equations (4.,49), (4.50} 1 we have
A1
=
k-tJt,
log • dt. (4.51) toThe integrands in equations (4.49), {4. 51) are always
positive and negative respectively. Hence, .for an !.T. arc to
be possible~ the boundary conditions must satisfy the following inequalities:
These are pJ:oecisel;v the conditions obtained in this section f'or the .existence, for large n. o:r an I.T. a:rc of exponential
variation. shown in Figure Lj.1 these conditions correspond to
Jyf
< 1.Case III: Other values of' y
Cases I and Il descr1bed above eXhibit the two main
behavioural types emcountered. The excluded, case:t fi3 = 11 {3
=
•1The results obtained :for all the cases have been
summarized below. The dependence of' y on the bou:ndary condi-tione is shown in Figure 1+-. 6,
1
r~
'
0 '{'
(i) y
=
0This correspond.s to the case fJ
=
1 and the boundary conditions b.0 + Ll1 =o;
6.0,i
6.1 "' The accelel?'ation due to the motor thrust is given by(4.53)
:t.e. a constant acceleration programme. I
(ii) 1>
hd>o
In this caseor according as y is positive o~
negative~ Thus for y aitive, the progli'aznme is one
ponential decayg whil~ for y negativo, the programme is one of
exponential growth., Moreover, as Jy).-.1 1
lct
1I...,
oo so that theapproaches an by a null thrust arc.
( 111 )
I Yl
=: 1at one
a) y IZI 1, (A:p=O, 8ofi.O) r,
f
=
4nA(1~(2~~)T)an+1
,
where
e
given by:f'ollowed by a
(1-{2+e)T):l!n+
1;e
is given byfollowed (or preceded)
(4.57)
at 'J~ 1 ..
(iv)
h'l
> 1f ·given by equation (3.51 ), wheve " is given b7
n.o+ oo the programme tend.s to a non ... zero impulee at
T ~ O and T
=
1 , aonneoted by a null thvustarc.
(v)
IYI
= o&This spends to the ease (3 :.::; "".1 "' t
equation (.3.51)- € put equal to
zero.
to two · ili\PUlses
T = 1, connected by a null thrust arc~
(vi) y == 0/0
given by
n.,. oo the
rr
0 andThis is the ioo.eterminate case :r>epresented by the
boundary conditions
In
this conditions are such that the rocket maycoast between the boundaries and satist'y both sets of conditions.
No expenditure of' :f'uel :le neceu~aar;sr ..
We may apply the previous theory to investigate the
p:t'oblem of' programming the thrust o:r a aound:b:tg rocket whose
launch the rocket f~om rest at the surface the earth
the thrust optimally with respect to eA~endi•
twe ao that it reaches a given height with zero velocity-.. I'Qtation the earth the variat
the g:vavi tational. will be neslected* problem is now
equivalent tq the one dimensional treated in the previous section except that the final time, tt , not specified.
impose a
tatiorwl
conditions
ot magnitude g acting downwards.
gravi-boundary , in the notation
ot
.xo =
o,
v() :::::to,
:::::t 0,
~1 = h,
"1
=o,
t1 ::::: t1 •General theory yields a condition for timization
rasp eot to the t inal t and this expressed by equation ( 1 .. 47) in [3) • This implies that the in
equat ( 46), so that from conditions (!h·J)
we may te
It that the only choice of values which can satisfy the boundary conditions
and
But
have
g-
.Jm....
(ki\)8 ;;: 0 at t=
o.
a+1
(5•5)
equation
(4.3)
taking g negat and X po tive, we(5.7)
Equations
(5.4), (5.5), (5•7)
now yieldat, + b
=
0 •~he acceleration function for the rocket now follows from equations
(5.6)-(5.9)•
We obtainwhere
the t (5c.13)
initial impulse
by
can
optimal
· equat
right
eque.t
t
ve.r•1
root
by a. null
t
=
:eunotion time
1 cfbtt~ined by subet
n we
in
te~m~equations
ions (!3.12), p~oblem
the behaviour
a time of
compute iture
obtain
ie
i¢n (1.3) which
equation (
15)(!5.16)
il!Ubstituting
to give
~
At1
+i)m{a<a+sly
/a "'
~i e:g~ (M~
1/s-
M;•Ia).
whe~e we have used equation (2e39) to exp~eas
v
in te~ms of s.As,$-+oo,
(M~
1/s.,..M;
1/
61}-+0
and it may be verified thatF~om q.,:mctttione (5~~17), (5.18) the fuel expenditure as a-+(X) is
given by
.it
:tue
QoQ;:tuaijj .l?91fer
oag;
. It was pointed out at the beginning of section 2 that if
the powev index
v
in equation (1.3) is given by the equation( 6.1)
then flight is carried out at constant power. From equations
(2.38),
(6,1)we
~ind that the value of the parameter e correspondingto
constant power flight is givenby
(6.2)
and hence, from equation ( 2.41); "' is given in this case by
(6 .. 3)
of motion for one dimensional problem, take$ the parti..,.
We will assume, as before, that the bOunda~y conditions are given by equations
(4.8),
and we will define new variables "'•~.c by the equations
variables t If X
(4.8)
become't .. 1 =
+1;}
e
1 t= +1•(6.8)
where the zePo subscript denotes initial values and the unit subsol"'ipt demotes final valuea.t All essentially different boundary conditions may now be by the two parameters
(
0 and (1, the scaled boundary velocities. The appropz.iate sealing factor given by the equation
-, -, r= ~ V; (6.9)
wh:l,oh easily deduced from equations (6.5) .... (6.
7),
and Whereterms
equation \vt-itten
(6.10)
A == kaP/1 (6.11 )
:B
=
i;z{k(a(to+t,. )+2b)+ 4gJ/1are constants to the boundary conditions.,
Integrating equation (6.,10) twice with respect to '1: and
inae:t"ting the boundary oo:nd1t1ons
(6.6)
we obtainwhich we
( 1 .,. (
0 "= 2B ,
2''0 • 1- 2B+
A • ~(C
0
+(i•1} ~B
=
:/c((~""''oh
(6.13)
(6.14}
(6.15)
(6.16)
The equat1.on of mot:t.on, ec;t,uation (6.10)* may thus be wttitten finally
• aocele~ation in the T
interval
the velocity ino~ement
demanded by the boundal"y conditions. Ther-e is also a te:t-m
t((
such a way as to satisfy the
variable
Equation (6e17) may be written
on the
(6.18)
where
:t
and y :ttespectively the acoelex~at:1on due to motol:' thrust and the acceleration due to both sui tabl;vThus
From equations (6.17), (6.18) we to motor thrust is given by
T~e aocele~ation the power
oase (VIllll
!),
exhibit features those in theacceleration programmes !Obtained in section
4
for · n, (i.e.11 slightly leas than 1 ) • Two eypical of acceleration
In programme 1, :t'
0 and f1 have the same sign and f
increases monotonically with 'f so that
ltl
has a minimum at thef'irst bounda:roy and a maximum at the other., In progr•amme 2, f 0 and f 1 have opposite signs and
ltl
has relative maxima at both boundaries. I11 this case the dir$ction of thrust alters du:r:-:lng the flight.The functions of C 0 and (1 !occuning in the right hand member of equation
(6.20)
are ea$ily related to the parameters A0,A1 defined
by
equations(4.27), (4.28).
It is found, usingi
equatio~
(6.9),
that' + ' ... 0 . 1 1 =: -(4 +6 )/2'i, 1 0 {6.21)
If F is the unsealed acceleration due to motor thrust, then
(6.23)
and after substitutir~ from equations
{6.21)•(6.23)
into equation (6.20) we obtain(6.24)
so that the nature of' the motor thrust acceleration program is, as before, determined by the position of the point (601A1 )
{1) '}1 =
o.
< 11 >
o
<I
-r
I
~ 1/3.The th:~:•ust is always in the eam.e direction and i$
positive or negative according
as
A0is
~eaterthan or
th~n A1 •(iii)
IYI
> 1/3.These results are very simila:t: to. those obtained at the end of' section
4
tor
the case of n.However,
thecritical value
of y for the constant power case is omthird,
whereas tor
thethe critical valu~ of 'Y was tmity.
Lastly, it may be observed that by substituting the value
s ~ 11 (from equation (6.2)) into the appropriate equations
in
the acceleration due to
motor thrust :ror the SoUt.lding · Rocke.t problem proposed in that
section may be dea:uoed tor the constant power
equation (5,12) becomes
(6. )
(6.26)
valt1es ot'
v
in the rangev
>o.
Fo~ eompleten~as we now consider the behaViourot
the Weie:vstl'aea fttnot :t~or•v
the11 "
o.
Subetitut:J.ng
v
= 0 into equa.tdon (2.1) we see thatme::;:; k
a constant. Equation (7.1) if}; eon~unotion with eq,uation (1.1)
$11ow:a that
Thus tlle acaele:t:"ation cannot be vax-ied. by c when v
=
o.Clearly, the g:l:1eatest economy of :el'.el attained by max:::tmizir,.g ~; the exhaust
velocitY•
!:r
v
< 01 then the function T (t') the t'orm shown inF:Lgtlre es~
T(f) is a monotonicallY increaaJing f'tmction o:e f' so tha.t to
maximize
T(f)
wechoose
(7.3)
This result is obvious~ also, t'rrom simpler considerations,
for equation (1.3) may be written
(7.4)
Where
v
is negative the exponent in the right hand member ofequation (7 .. L~) is poai tive so that as the acceleration f increaaea,.
the fuel expenditure m decreases. For"a hypothetical rocket
motor of the type considered, it will clearlY be moat efficient to run the rocket at maximum· thrust when the motor is operative
at all.
1 .. o. r~
..
Ch .. odl?l ovsky ~ Y .. N.. !vanoV', and V • V • T okarev • On the Mot 1 on of' a. Body of Vax,iable Mass with Constant Power- Consumption in a Gx~avitational Field• Doklady AN U88R 137, No, 5 ( 1961) .. 2. G.,L., Grodzovsk;Y; Y.N. Ivanov, andv.v.
Toka:rev, On the Mo·tionof a Body of Variable Mass with Constant Power Consumption in a G:ravitatiGnal Wield. ~IIth International Astronautical
Congress, Washington,
D.O.,
1961, Proceedings, Vol.1.
Wien;Springer,..Ve:~?lag; New York and London# Academic Preas, 196,3.
3,.
:o ..
F. Lawden, Optimal Tr1ajeoto~:tes for Space Navigation.PART III
OPTIMJ\I.~ TRAJECTORIES FOR A
The possibility of' using the force exerted by a stt*eam o:f radiation on a reflecting aurtace a means of propulsion within the solar system was investigated by Garwin [1] who
concluded that •solar sailing' offered a practical propulsion system. Tau [2] consi.dered the eduationa of' motion ot a solar sail and by considering cases where the magnitude of the radial acceleration· co\lld be neglected11 obtained a.pprosd.mate solutions
in the form of 1Pga:tiithrnic irals fov the path a sail
vehicle• assuming that the angle of' incidence of radiation on the sail Waf;! constant. He also computed the constant sail angie, a function of strength, minlimizing the time o:f transit betweem points on a logarithmic spiral trajectory distant
r
0 andr
reapeotively :rx-om the sun. London [_;] ahow~d thatlogarithmic spil'al trajectories could, in f'aot, be obtained from
th~ exact equations with constant sail setting, However, if one
wishes to util:i.ze the full potentiality of a solar sa;i.l vehicle to carry out some transfer manoeuvre in an optimal manner, one
cannot assume that the sail angle will be constant during flight. The problem arises of finding the optimal way of programming
the sail angle as a function of time, Kelley
[4]
used solar sailing as an example to illustrate the •graclient• method of calculating optimal trajectories. In the present work, theoptimal solar sailing problem is treated as a Meyer P:roblem., In section 2, the question of the optimal foi•m
ot
the sailarea of sail, a planar sail delivers maximum thrust in any
required (possible) direction.. ]'light :i.:n. a Ullif'o:t•m g:ravi ta-tional and radiation field is considered in section 3. Special
solutions, involving cons·tant angle sail settings with the
possibil:t ty of' a corner·, are obtained f'or the problem of'
minimum time flight.. The equationsof motion for the inve~se
square field case are set out in section
4
and are put into adimensionless f'ol;'m., In section
5
the boundary conditionsapplicable to departure from and arrival at specified conic
orbits are stated,. It is shown that a solar sail vehicle can
only arrive at a conic orbit 'from outside' that orbit.. In
section 6g the differential equations to be satisfied by the
Lagrange variables for minimum time flight in the inverse sqUt:\re
case are obtained. The question of optimal progra~ning of ~,
the sail strength, is also oonside:r.*ed in section 7., An amb~.gui ty
of s:l.gn tor <J, the sail nngle, encountered in section 6 is resolved in section 7, in which the Weierstrass condition is
applied., A separate formula is deduced for calculating
o,
when0 is small., In section 8 the differential equations for the
Lagrange variables are solved analytically from zero o:t:>der terms
for the case of' departure from circular orbit after expanding
the appropriate functions in powers of iT, the sail strength,
which is assumed to be small. Fo~ cases in which 0 is
approxi-mately constant the bolxndary conditions are applied in section 9
to the solution found in section 8.. An exact solution of' the
type predicted was computed (Table A .. 6) and compared with the
case of departuro from a general conic orbit are considered in section
9.
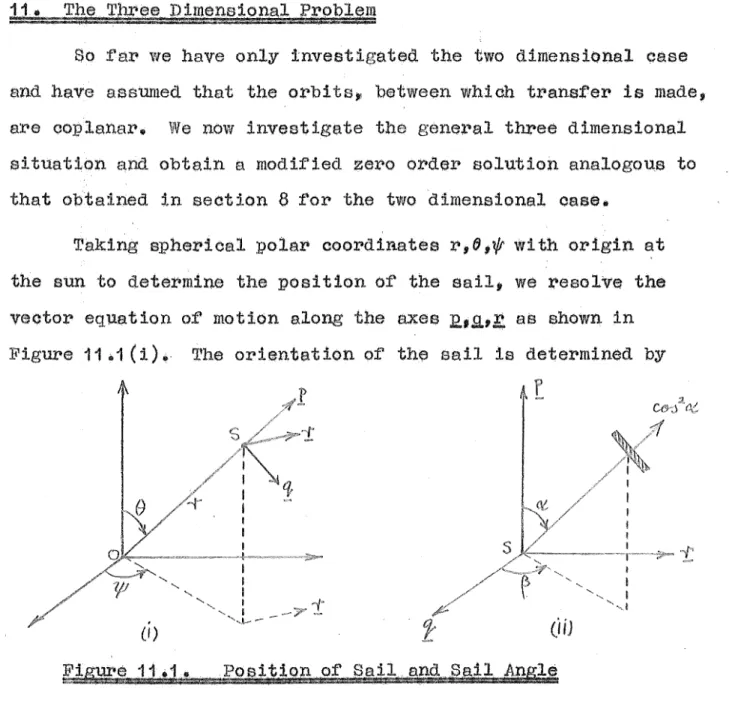
Some sample families of 6-progvammes were computed from these solutions. The optimal solar sailing problem inthree dimensions is considered in section 11 and zero order solutions tor the case of departure from circular orbit are derived. Some numerical results were also computed for the three dimensional case. In section 12, the convergence tech-nique used for obtaining optimal 8-programmes from the exact equations is explained. A n1~ber of solutions satisfying the boundary conditions for transfer between circular orbits were obtained by this method. Lastly, the computer programmes used
to carry out the va~ious calculations are collected in an
2. Force
op
e, Ref'l.eotipp; SurfaceF
Consider the force on a plane, perfectly reflecting, surface due to incident radiation 1, making an angle ~ with the normal to the surface, The rate of change of momentum of the photons in the beam due to reflection is proportional to cos8, Also, a unit area of the surface will be subject to the 'radiation contained in a beam of cross section cos8. Thus, the force dF acting on a given plane element of surface area dA will be given by
where~ is a measure of the intensity of radiation. In equation (2.1)
e
must satisfy the inequalityIn developing the theoray whi.oh follows, pe~feot speoulat<> reflection is assumed.
The equation (2.1) for the force due to incident radiation is analogous to that assumed by Newton for the
resistance encountered by a body moving through the air. Thus, if a stream of particles moving with uniform velocity
V
areincident at an angle tl on a plane awfaoe and are reflected in
a perfectly elastic manner, we obtain equation (2.1) again fo:r the force developed due to the reflection of the particles, where ~ is given by
and p the density of the stream.
The well-known problem of Newton in the Calculus of Variations seeks to determine the particular surface of
. '
revolution, formed by rotating a curve about an axis parallel to the direction of motion of the incident paratioles, Which minimizes the force on the surface due to the particle stream. The equations (2.1) and
(2.3)
do not, in practice, give a good characterization of the force on a surface placed in a dense stream of gas, but they may be expected to apply moremin~ the pertwbing f'orce
o:ue
to radil!ltion encountered whenI thel '\tehiole is symmetrically placed with X'espect to the
ttadiation stream. The detai
ot
the solution are given in aeatlona9.14,
9.15
at[6].
·w:tth regard
to the
solar sail, however, wt! are notinterested in minimizing the radiation :t'oroe; welwish, indeed, to maximize it. The quest;ton theref'ore ses as to what space oontiguration of' a solar sail of given suvtace area will
maximize the th.rust de"treloped :tn a direction making a specified angle
1
with the direction of radiation.The most obvious form of a sail giving a thrust in a otion
making
a:n angle71
with the directionof
radiationa plane sail whose normal is aligned with the required direction of thrust. But it is not immediately obvious that this
necessarily the optimal configuration. Indeed, it is certainly not the configuration giving the maximum component of force in the ~equired direction.
Let
the normal to a plane sail of' unit area make an angleThus, dit't:e:rentiating equation ( 2.Lt.) with respect to fJ we have
To f'ind the value of fJ maximizing F(fJ), we equate F•(fJ) to
' ''
zero aoo, upon discarding the solution cosfJ
=
0, whichminimizes F(fJ)~ we obtain the condition
tan{'
=
2tanfJ whereThis leads to the following solution for fJ in terms ot
1;
(2.8)
where
Equation (2•8) yields two solutions in the range
-ttn'
< fJ <tff,
one of Which corresponds to a minimum
o:r
F(fJ) while the other corresponds to a maximum. The maximizing value is determined by noting that (} and0
have the same s:tgn, .A typical solution is shown in Figure 2.2.Because fJ is not iden.tioal with '8~ 1 t might be thought that a great~r thrust in the direot1.on ;St. would be obta:Lna.ble
by suitably deform1.ng the plane s~J.l eo as to take advantage of the greater thrust Gomponente along ~ obtainable at
reduced angles. Let us consider the erfect of bending a plane, square sail along a line near the middle of the sail, ao that the situation is ae shown in Figure 2.3.. The resultant force vector must still make an angle fJ with the axis
ox
eo that wehave the overriding condition
(2.10) where Fx,F
1 are the resultant components of force along the
axes Ox,Oy respectively. Without loss of generality we may assume that fJ and
o
2 are positive. :B'rom equation (2.1 ), we see that a unit; square, plane sail, with normal making an anglee
with the Ox axis, would deliver a thrustWe now proceed to determine the thrust delivered by a comparison sail of the form shown in Figure 2.3 subject to the condition
Assuming ~1 .~2,~r are small and expanding the
tri-gonometric functions to second order, we obtain the following expressions for Fx and Fy;
Fx;: <ro3{1 ...
~(~
+<5'2 )+!(2t2-1)(&;
2+d':) ... 3td'r(d'2-6'1 ) }, (2.12)
Fy
=
cro
2s{1
+(~t
t)<8
1 +<f2)+·k(t24)
(~
2+~
2)+2(~t
t)~r(~
2
-o\)
},
(2.13)where
o
.!l:i: cosO ttand
t = tane' • (2 .. 16)
Substituting for Fx am FY :rrom equations (2.12), (2.13), the condition (2.10) becomes
(2.17)
We see from equation (2.17) that 6'1 +0'2 must be of the
second order of small quantities. We therefore write
where k is a constant of' zero order and
From equations (2.18), (2.19) we have
Now, ,ubstituting f'or
&'
1 p6'2 f:t"om equation@ (2.19), (2.20) .into equation (2.17), we obtain .the following expression foror=
6'
v
= (
t ....'l:k
)6'. (2. 21 )Equations (2.19)•(2.21) now express 81 ,82,6'r in terms of' 6' and
k.
Substituting f'o:t> these quantities into equations(2.12),
(2.13) we obtain
Thus, the ef'f'ect of' making a bend
o:r
the type considered is to reduce both Fx and Fy and hence also the magnitude of' theresultant thrust F, No advantage, theret:o:t;"e, is to be gained by bending the sail slightly and we will, from now on; consider
will consid.e1• the two dimenoio :l'lie;ht o:r a :plane
a gr>uvi tatio radiation , both.
direct the tud.e of the t:lonnl
ce on the gail be g and t it be dir-ect at an
angle ex to an axiD Ox, axeu such
that tho radiation is d cted jJo:::ii t 1 vul;y along Ox,. 'l'he
g:t:'o.vitntional :Co1~oe components alone the x aml y axes ar-e tlmfl given by
:::: g COB CX
,
(3 .. 1)Hy :::: g sin ex
,
( 7 .J .. ' ) ) Lively., Let. f'o:r;•ee on tho ::w due to :ion n.t
normal :i.nc:i.dence be the radiation force according to equation (~~ .. ·1) we have following ions motion:
• (7. 7)
X ~- u ,.:;;
..
";• C3,.Lt.)
y = v
"
.
cos3fJ (3 .. 5)u :::l +erg
co (} sinO , (3 .. 6)
·where u anc'l v are the components of' trw fW.il' velocity
the x ctively• and (} is by the
nox•mal to tho plo.ne the sail th the d ction of r iation,
C1S cated. in
sion the JJl'oblem is
character•isti.c •{
"x ::::
o '
~ = 0
y
~ :::; - A n
U XJ
•
"v
= ..."Y "
1\
~;~"~.~~ :::: ~
..
v
co (}
r:J.re
Equations
(3 ..
8)~(3.11) are ioonediately integrable to ~ive"x
::: a ff"-y
::: b II"-u
= c-
at'
"v
=
d-
bt,
to be (.3 .. 8) (3 .. 9)
(3 .. 10) (3 .. 11)
(3 .. 1 2)
(3 .. 13)
(3 .. il~.)
(3 .. 15)
(3 .. 16) a,b,c,cl are constants. 'rhur;; f'rom ions ( 3 .1 2 ) , ( 3 .. 1 5 ) and (3.16) 11 0 is clotermined according to the ions
use o:e f'amil concept the' imer locus• we may int equat (3.17) pictorially.. Thtus we suppose 'Au, 'Av to be the components of' a vect.o:t• primer vector, so
that es linearly with ct to time, in accordance with ions
(3 .. 15),(3.16) ..
The tip of' the mer• vector movesa stra line with constant velocity. This line is
called~ the ime1~ locuB and shown in t UB now
resolve the prime:t• vector along axes 0/\ti_/\~ obtained !'rom the axes OAu'Av by l"Otation th:r•ough an 0,.
see that
'A~
=
'AucosB + /\vsinB , (3 .. 1 B) )\; = -'AusinB + 'A..,coc:,() ..Then, st'tbstj:tut :from equntJon (3.,12) into the quotient of' equations (3 .. 1 B), (3 .. 19) we
'A'
v
that
If' we clef'j.ne thtj (3 by the equation
then equation (3.20) be written
te.n/3
=
2 fJ ..In , equation (3.. ) will have two solutions :tn. the
interval [ ... 7T/~~, +7T/2] , as indicated. in the f'igure.. One of' ther:Je will be eliminHted by the eondi t:l on ..
ier•ntr•am;: eo:ndi tion iB considered in il in
section 7 vw may decJuce :f'rom the presented there that
fJ is c.itive or• ive 5.ve oP
OJ.)timizing
l~quation (3.. ) is f'amiliaPo~ In J':'act, it is icle:nti with equation ( 2 .. 6). 'I'hc cation is that
e
is r:;o as to maxhrtize force component in the d ction of' the primer ve cto:r·.,the ion p1•ovi by the We s
condition we may UBe
ded-uot about 0-pr•ogr•amrne to
v1e notice -~hat () o1wnges .Crom -rr/2 to +·rr/2 (o:r;• vice versa), "-u being ive., '.rhis clEmJonstx•ates
fHJlbili a corner be trajec
the co:nrli tio:n :Cor· this is, f':r•om ions
(3.15),(3.16),
also note tJ:mt, with the possible exception of' a Bingle int dlscontinu.it;y, 0 is either monotonically inCl"'easing or
mono-tonically creaE:1ing.. 'J'he general :Co:t•m of the 0-I:n~ogramme is shown 5.n
The time origin is t to be the point at which '"Ay vani Othe:r- possi'ble gcnel'al progr•ammes m~e obtainable from f 3 .. 3 .. (1) and 3 .. 3 .. (ii) by the time axis..
.M1 t ~ ± co :.l.t
will noticed tht"l.t 0 tendB to two 1imi tin1_.; values denoted by
consist of some section t f':t'om the gene:r•al p:r•og:r•amrner3 3(j.) or {3( ii) taken between two time limi tu tb
While 3 .. 3., shovts the most
behaviour of fJ ns a f'unction o:r time, we must also aome ecial case:;;..
will be convenient in th~.s Part to distingu1eh. quantities which
are
to O(i!i ealculatedat
the departure and arrivalterminals by subscripts b and t respectively.
The 0-programme is particularly simple if' the primer locus
B throu.gh the ortgin.. •rhe belu:IViour in thJ.s cam:; is
il:Lustr•atecl :ln
If' direction o:C of~ int p i f:J flS by the
ar-:t•ow in !I th.e (:J ste initially ot' a corwtant negative angle
-
~['his s to a constantpo ti ve angle (:J
1 I:HJ P pa.t:H3es thr•oue;h the origin. '.L'he act;ual
magnitude of' the is determined by the gradient the line OP,. ]j'rom equat:i.ons (3,.15), (3 .. 16) we find that the
condi-t pr•imer locus pass throu,gh the ori is a
c1 = 0 ~
It is also possible for primer locus to d(;'lgenerate to a po:tnt.. Thie occurs wh.en a and b both sh. In this case 0
lr~ constB.nt :Cor
In to illustrate above theor-y we will consi<ler a PEJ.r>ti culal"' t ation problem, namely maxhnization of
I,et V(:x:,y) be the gravitatj.onal :potential so that
cr ::;:
-av/. ay ..
""'y(3. 25) (3.. )
a vehicle o:t' 'l:tn:i.t mass the kinetic e:nert;ry is given by
We may, without loso generality, tial values
at an initial time
t :::=
o ..
The rinal time will then be
..
Denoting the the subGcr t fi we see thB.t the :t'inal net(3 .. 27)
(3 .. 28)
values by
by
(3 .. 29) Thus we .mHy clef'ine ,J 1 the pnyof'f' f'unct ion to be minimi , by the equation
.J ::::
..
~:l ince at•e not prescr•ibed.2 we have the bou:ndru•y conditions
the t i 8 f'ol» any the VfJ:t""i
"
=-
II:X{ (:'> .. 32)
"
Y:i...
p;y'
( 7. .)
..
)"u ::::::: uf 1
(3.34)
"
= v1..
V{Equations
(3.13)-(3 .. 16),(3 ..
)-(3.35)
lee to determine the constants a,b, c,d., T'he£;e are,
'b =
-c
=
'llf- ,d ::::: Vt - gy t! 11
a:nd , f'rom equnt:l.ons ( .. 15L ( .. 16), the pr•imer~ v·ector cornponenta :a.:r:e r':iven by
"' "u -- U t -:~.
(3 .. 37)
(3~38)
( . ) • "7- )
(3 .. }+0)
(3~41 )
will clearly be thc'!t j:'o:t' I'Jh:i ch ld vanishes. In this case we have
:::::::
=
0::md cH.runtions (3 .. liO), (3 ..
4.1 )
combine to givethe p:r•imer vector is constant VJi th Pe ect to t and coincides with the final velocity. Since is no