International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 2, February 2014)
569
Analysis of Camera Restriction-Free View-Based 3-D Object
Recovery
Vinod Kumar Upadhyay
1, Dr. Padmashree Kunthe
2, Prof. Sameena Zafar
3 1M.Tech Student, PCST Bhopal
2Professor and Principal, PIES Bhopal
3Asst. Professor & HOD, PCST Bhopal
Abstract— 3-D models have become very popular in many applications like manufacturing, medicine, and entertainment
etc.Retrieval by content of 3-D models is becoming more and
more important due to the advancements in 3-D hardware and software technologies for acquisition, authoring and display of 3-D objects, their ever-increasing availability at affordable costs, and the establishment of open standards for 3-D data interchanges. In this paper, we present a new method, referred to as view-based image retrieval, without the limitation of camera array constraints and with adaptations to support effective retrieval by content. Due to this, views can be captured from any direction without camera constraint. According to the method proposed, a set of images is derived for each model, to obtain a view based description of its 3-D shape. Experimental results are presented, showing the effectiveness of the proposed method for retrieval. The experiments are conducted on the National Taiwan University 3-D model database.
Keywords— Camera constraint-free, 3-D object, View-based, KL-distance, cloning.
I. INTRODUCTION
Extensive research efforts have been dedicated to 3D model retrieval in recent decades. It leads to the urgent needs of efficient 3D object retrieval and recognition technologies [1] - [4]. Typically, 3D object retrieval and recognition approaches can be divided into two paradigms: model-based and view-based. Early methods are mainly model-based, which require 3D models to be available explicitly [5]–[7]. However, it is difficult to obtain 3D models in many practical applications. An alternative approach is to construct a 3D model based on a carefully designed set of 2D images. Recently, extensive research efforts have been dedicated to view-based 3-D object retrieval methods because of the highly discriminative property of multiviews for 3-D object representation. Early works on 3-D object retrieval are based on 3-D models; require 3-D models to be available explicitly, which limits the practical applications of 3-D model-based methods.
Fig 1. Object example described by multiple views.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 2, February 2014)
570 II. CAMERA CONSTRAINT-FREE VIEW-BASED RETRIEVAL
FRAMEWORK
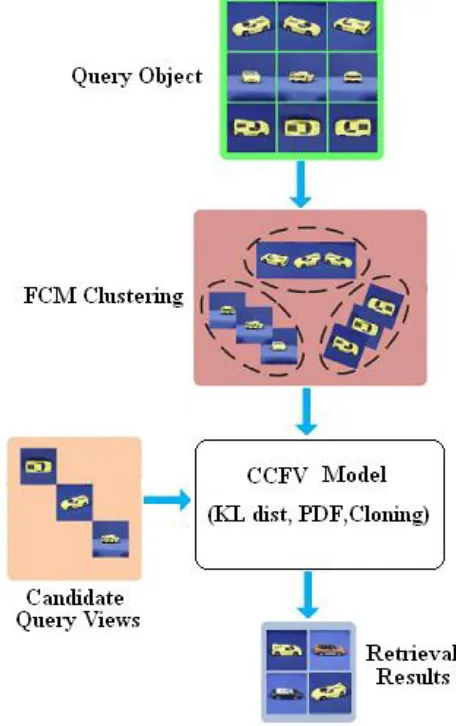
In camera constraint-Free View-Base Retrieval, each 3-D object is represented by its view set captured from any camera array. These views are used to convey the 3-D structure information through the relationships among such views. The view-based 3-D object retrieval depends on the analysis of these view sets. For the query object Q, the retrieval task is to find the matched/similar objects from the 3-D object database. The key for 3-D object retrieval is to find the relationship between the query and the objects in the database. The algorithm of the proposed architecture is given in Figure 2.
A. Clustering
Clustering is the process of grouping the similar things together, in the proposed algorithm the database images are clustered into groups based on the features of the images. First, the views of the query object are grouped into clusters; FCM clustering is used for the experimentation. The closest views are merged together until the intra-cluster distance between any pair of views exceeds a
preselected threshold.Fuzzy c-means (FCM) is a method of
clustering which allows one piece of data to belong to two or more clusters [17]. It is noted that each group of views belonging to one object in the database is also grouped into clusters.
A Gaussian model is learned to model the feature distribution in each cluster. Let X be the feature of the training view; the model can be defined as:
Where denotes the ith Gaussian
component, wi indicates the weight of the ith Gaussian
component, and ngm is the number of Gaussian models.
B. Data Cloning
[image:2.612.328.556.141.504.2]We use a new statistical computing method, called data cloning, to calculate maximum likelihood estimates and their standard errors for complex ecological models [19]. The idea is simple: construct a full Bayesian model of the problem, complete with fully specified, proper prior distributions for unknown parameters, but instead of using the likelihood for the observed data, use the likelihood corresponding to k copies (clones) of the data, where k is large and the copies are assumed to be independent of each other.
Fig 2. Architecture of the proposed CCFV retrieval.
The posterior is then calculated and the mean of the resulting posterior distribution equals the ML estimate, and k times the variance of the posterior equals the asymptotic. The cloning is used for the PDF of the query and the matching database images; the best matching is then obtained using KL distance concept [21].
C. Hierarchical Evaluation Model
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 2, February 2014)
571 We also propose an extended version of the hierarchy approach. In each step of the hierarchy, instead of assessing only the matching score obtained at that level, the sum of all levels computed to the moment is also used. At the end of the hierarchy, the sum of all regions is used to verify whether images belong or not to the same subject.
III. EXPERIMENTATION AND RESULTS
National Taiwan University 3-D model database is used for experimentation; gui created in MATLAB consists of three main panels viz. training panel, search panel and input panel as shown in fig 3.
Fig 3 (a). Training Panel
Depending upon the number of query views specified by the user, training is done to find out the availability of the database folders containing images equal to or more than the views specified. The training time hence also depends upon the number of views specified by the user, as the view count increases the number of folders containing equal or more number of images will go on decreasing, thus training time will decrease with increase in number of views.
Fig 3 (b). Search Panel
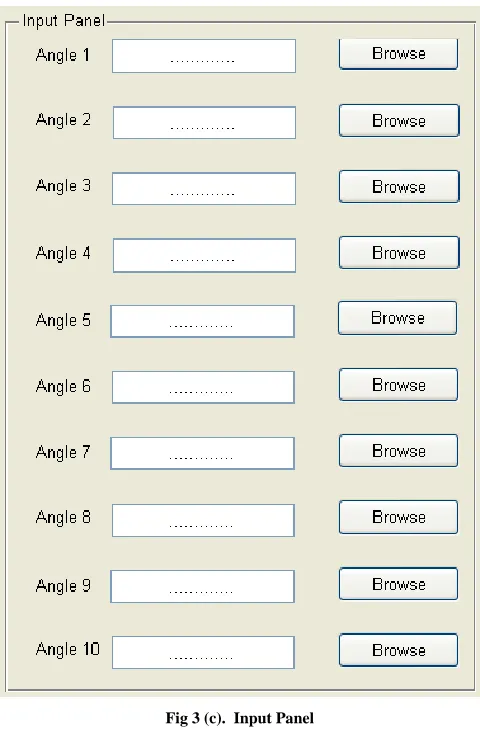
Fig 3 (c). Input Panel
The search panel provides the facility to specify number of required result images. Various views of query object can be entered through input panel; maximum ten views can be provided.
The experimental results for the query object ―car‖ are shown in fig 4. Here a query model ―car‖ is selected; three views are used for the input image and for the output nine views are specified. From results the various parameters like precision, F-measure, are calculated.
[image:3.612.324.564.132.497.2] [image:3.612.47.289.282.406.2] [image:3.612.48.290.510.597.2] [image:3.612.321.565.612.660.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 2, February 2014)
572
Fig.4(a): Result images
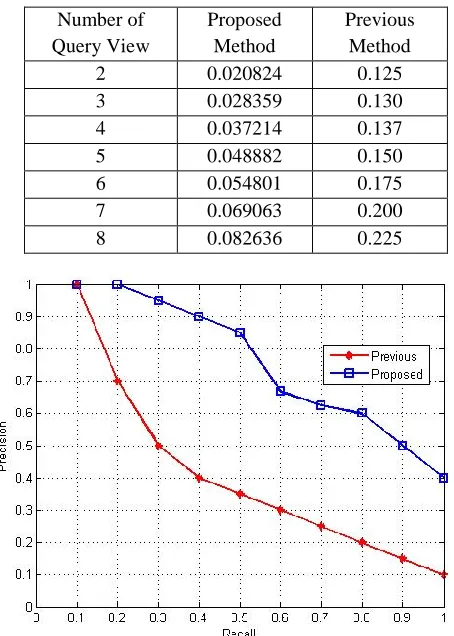
Table I Gives the results for the training and searching time required for the different number of views. The training as well as searching time increases with the number of views. Results for the precision are presented by Table II. The comparative results of the retrieval time in seconds for the proposed and the previous method is represented in table 3. The graphical representation of recall vs precision of the proposed and the previous (normal methods of CCFV) methods is plotted in figure5.
TABLE I
RESULTS OF TRAINING AND SEARCHING TIME WITH THE PROPOSED METHOD FOR DIFFERENT NO. OF VIEWS
No. of Views
Training Time (Sec.)
Searching Time (Sec.)
4 9 16 25
2 21.09 0.017 0.018 0.019 0.020 3 18.73 0.025 0.026 0.027 0.028 4 13.57 0.033 0.034 0.035 0.037 5 12.69 0.044 0.045 0.046 0.048 6 10.79 0.051 0.052 0.053 0.054 7 9.99 0.063 0.064 0.066 0.069 8 9.89 0.074 0.075 0.078 0.082
TABLE II.
RESULTS OF PRECISION WITH THE PROPOSED METHOD FOR DIFFERENT NO. OF VIEWS.
Number of Views
Precision
4 9 16 25
2 0.33 0.44 0.375 0.36
3 0.5 0.667 0.625 0.60
4 1 1 1 1
5 1 1 1 1
6 1 1 1 1
7 1 1 1 1
8 1 1 1 1
TABLE III.
RETRIEVAL TIME (IN SECONDS)COMPARISON BETWEEN PREVIOUS AND PROPOSED SYSTEM
Number of Query View
Proposed Method
Previous Method
2 0.020824 0.125
3 0.028359 0.130
4 0.037214 0.137
5 0.048882 0.150
6 0.054801 0.175
7 0.069063 0.200
8 0.082636 0.225
[image:4.612.49.288.138.333.2] [image:4.612.331.558.163.346.2] [image:4.612.326.553.350.668.2] [image:4.612.45.293.480.628.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 4, Issue 2, February 2014)
573 IV. CONCLUSION AND FUTURE WORK
The CCFV can search 3-D objects with the query of any view set captured by any camera arrays. That is, no camera constraint is required. The speed of Proposed CCFV is more than the existing methods of retrieval also accuracy is more due to used of extended hierarchical matching. The concept of cloning results in better matching of the query images; use of FCM clustering is helpful to identify the objects belonging to more than one set. Proposed CCFV still relies on the static query views. However, for real-world applications, users cannot capture too many query views for objects. Thus, In the future work, we can focus on designing a method to automatically suggest new best query views for users according to the existing query views.
REFERENCES
[1] A. Bimbo and P. Pala, ―Content-based retrieval of 3D objects,‖ ACM
Trans. Multimedia Computing, Communication and Appl., vol. 2, no. 1, pp. 20–43, 2006.
[2] B. Bustos, D. Keim, D. Saupe, T. Schreck, and D. Vranic, ―Feature
based similarity search in 3D object databases,‖ACM Computing Surveys, Vol. 37, No. 4, December 2005, pp. 345–387.
[3] J. W. Tangelder and R. C. Veltkamp, ―A survey of content-based
3D shape retrieval methods,‖ Multimedia Tools Appl., vol. 39, no. 3, pp. 441–471, 2008.
[4] Y. Yang, H. Lin, and Y. Zhang, ―Content-based 3D model retrieval:
A survey,‖ IEEE Trans. Syst., Man, Cybern., C, Appl. Rev., vol. 37, no. 6, pp. 1081–1098, Nov. 2007.
[5] A. E. Johnson and M. Hebert, ―Using spin images for efficient
object recognition in cluttered 3D scenes,‖ IEEE Trans. Pattern Anal. Mach Intell., vol. 21, no. 5, pp. 433–449, May 1999.
[6] K. Lu, N. He, and J. Xue, ―Content-based similarity for 3D model retrieval and classification,‖ Progr. Natural Sci., vol. 19, no. 4, pp. 495–499, 2009.
[7] R. Osada, T. Funkhouser, B. Chazelle, and D. Dobkin, ―Shape
distributions,‖ ACM Trans. Graph., vol. 21, no. 4, pp. 807–832, 2002.
[8] T. F. Ansary,M. Daoudi, and J. P. Vandeborre. ―A Bayesian 3-D
search engine using adaptive views clustering.‖ IEEE Trans. Multimedia, vol. 9, no. 1, pp. 78C88, Jan. 2007.
[9] Yue Gao, Wei-Bo Wang, Jun-Hai Yong. ―A Video Summarization
Tool using Two-Level Redundancy Detection for Personal Video Recorder.‖ IEEE Transactions on Consumer Electronic, vol.54, no.2, 521 C526, 2008
[10] Qinkun Xiao, HaiyunWang, FeiLi , YueGao, ―3D object retrieval
based on a graph model descriptor,‖ Neurocomputing 74 (2011) 3486–3493
[11] JohanW. H. Tangelder, Remco, C. Veltkamp,
―Survey-3D-shape-retrieval,‖ Multimed Tools Appl (2008) 39, pp.441–471.
[12] Hartman J, Wernecke J (1997) The VRML 2.0 handbook—building
moving worlds on the web. Addison Wesley Developers Press.
[13] Tversky A (1977) Features of similarity. Psychol Rev 84(4):327–352
[14] A. Khotanzad andY.H.Hong, ―Invariant image recognition by
Zernike moments,‖ IEEE Trans. Pattern Anal. Mach. Intell., vol. 12, no. 5, pp. 489–497, May 1990.
[15] W. Y. Kim and Y. S. Kim, ―A region-based shape descriptor using
zernike moments,‖ Signal Process., Image Commun., vol. 16, pp. 95–102, 2000.
[16] M. Steinbach, G. Karypis, and V. Kumar, ―A comparison of
document clustering techniques,‖ in Proc. KDD Workshop TextMining, 2000, pp. 1–15.
[17] J.C. Bezdek, R.T.Ehrlich,W.Full, ―The Fuzzy C-Means Clustering
Algorithm,‖ computers and geosciences vol 10 no 2-3,pp.191-203,1984
[18] Yue Gao, Jinhui Tang, Richang Hong, Shuicheng Yan, Qionghai
Dai, Naiyao Zhang, and Tat-Seng Chua, ―Camera Constraint-Free View-Based 3-D Object Retrieval,‖ IEEE Transactions on Image Processing, vol. 21, no. 4, April 2012,pp.2269-2281.
[19] S.R.Lele, B.Dennis, F. Lutscher,‖ Data cloning,‖ Ecology Letters, vol.10,pp. 551–563,2007.
[20] G. Shakhnarovich ―Statistical Data Cloning For Machine Learning‖
Research Thesis Sivan, 5761 Haifa May, 2001. Pp.35-40.
[21] D. H. Johnson, S. Sinanovi, ―Symmetrizing the Kullback-Leibler
distance,‖ Stat. Soc., 28:131–142.1966.
[22] R. Ohbuchi, K. Osada, T. Furuya, T. Banno, ―Salient Local Visual