International Journal of Engineering & Computer Science IJECS-IJENS Vol:12 No:06 51
Stabilizing Load Frequency of a Single Area Power
System With Uncertain Parameters Through a
Genetically Tuned PID Controller
Alwadie, A.
Department of Electrical Engineering Najran University,
P.O.Box 1988, Najran 11001, Saudi Arabia e-mail: [email protected]
Abstract-- This paper proposes a genetically tuned PID controller for the load frequency control of interconnected power systems. This work has large impact, especially, if one takes in considerations the nature of system parameter variations beside its uncertainty and the wide range of disturbances that the power system may face. The first step in the design procedure is to find out the appropriate PID parameters which are important to initiate the genetic search within a confident evolution environment. The industri ally recognized Ziegler-Nichols methodology is first employed for this purpose. S econdly, different search criteria such as Integral of Time multiplied by Absolute Error (ITAE), Integral of Absolute Magnitude of the Error (IAE), Integral of the S quare of the Error (IS E), and Mean of the S quare of the Error (MS E) are implemented to ensure the robustness of the proposed controller. S everal experiments are conducted along with a Genetic Algorithm (GA) in order to evaluate the best results in considering the search criteria. The Results of implementing the proposed GA-tuned PID controller show that IS E and MS E are the most efficient algorithms to tune the PID controller, especially, if one considers the power system parameters uncertainty. This was often neglected by many researchers until now.
Index Term--Load Frequency Control (LFC) - S ingle area power system - Interconnected power system - PID control - Parameter uncertainty - Genetic Algorithm - Global Optimization.
I. INT RODUCT ION
In the last decades, an enormous number of Load-Frequency Control (LFC) methods are proposed [1-8, 12, 13]. However, the present publications in this field are still showing a continuous interest for designing LFC systems [26-28]. In 1969 and 1970 Elgerd and Fosha [1-4] have proposed an integral control system. The integral gain is chosen according to conventional transfer function analysis and the used critical gain was able to damp frequency deviations for a single area power system. However, the application of such algorithm for a two dissimilar areas needs tedious trial and error procedures [9]. For a detailed multi area power system, it is not possible to apply this method for the design of (LFC) the system. To avoid this problem, the same authors and others have introduced an optimum control method based on minimizing the square errors of a cost function describing the power system frequency deviations and tie line powers [5-7]. The algorithm is applied for a two area power system giving
better results. The parameters of the selected weighting matrix are chosen as a result of comparing the overall system eigenvalues before and after the application of this optimum control method. Such parameter selection will be, obviously, very difficult for a multi area power system. All the above mentioned control methods are continuous (LFC) systems. Further considerations are required for practical implementation of those systems . The reason behind this is that the system data, i.e., frequency and the tie line power, which are required to determine the control signal, are measured in a discrete mode. Consequently, some states can‟t be measured at all. Few works have been done concerning discrete-type (LFC) and in most of these works significant system nonlinearities, i.e. generation rate constraints have been ignored. To avoid such problems, Hiyama (1982), Kumar (1989) et al and other authors have proposed discrete (LFC) techniques [8,9, and 12]. However, these proposals are also bas ed on complex mathematics and require an optimization technique to select the necessary weighting matrices. Moreover, in the work of Hiyama [8], it is not clear how to determine the initial ratios of the performance indices especially for a multi area power system. Nour Eldin and Abdel-Hamid have proposed a robust state observer [10,11] which enables generating all the immeasurable states from other measurable ones. This work was essentially applied for the synchronous machines connected to a network used as a Benchmark model for studying Sub-Synchronous Resonance (SSR).
Wang et al and Lim [12,13] have proposed a robust (LFC) system considering the system nonlinearities and parameter uncertainties. This method is based on solving the Riccati-equation and the controller is designed for the bounds of the model parameters. Empirically it is understood that some initialization values of the weighting matrix may lead to system instability. In addition, the results of this study are characterized with a very high over shoot, especially, when the generation rate constraints are considered. Results of multi area power system show that the system presents larger overshoots and longer settling times.
International Journal of Engineering & Computer Science IJECS-IJENS Vol:12 No:06 52 excitation system forming a Power System Stabilizer (PSS)
to enhance the damping of the low frequency electro-mechanical oscillation characterizing generator rotor dynamic behavior. It is clear from the results of the proposed system that there is insufficient damping, while original PSS without such tuned controller gives better response. This is due to the fact that the proposed tuned system is reduced to just a second-order equation while the traditional PSS is of higher order. In [17] the authors have proposed an optimal design of power system dynamic stabilizer by grey prediction PID control. However, the grey prediction is implemented to find out the suitable control signal for a specific generator in a multi-machine system; in addition, the algorithm also searches the optimal parameters of the PID controller. Although results of this algorithm seems to be fast and sufficient, the used grey algorithm gathers Integral of Absolute Magnitude of the Error (IAE), Overshoot (OS), and Steady State Error (SSE) to form the genetic fitness function from three functions; g1, g2, and g3 corresponding to IAE, OS, and SSE, respectively. This may add more complexity to the algorithm, especially, for the procedure of on-line implementation.
Nowadays, with the development in digital technology, it has become possible to develop and implement new controllers based on modern and more sophisticated synthesis techniques. Indeed, controllers based on robust optimal control, adaptive control, artificial intelligence (Fuzzy logic, neural networks, and genetic algorithms) are being developed [16-22].
To achieve an efficient fuzzy logic controller, several steps, such as the selection of control variables, the membership function definition, the rule creation, the fuzzy inference and the defuzzification strategy, should be carefully considered [14,18]. Genetic Algorithms (GA) have been shown to be capable of locating high performance controllers in complex domains without experiencing the difficulties associated with high dimensionality or false optima as may occur with other optimization techniques [16,17].
Moreover, GA, as a stochastic global search method, can imitate the process of natural evolution. Consequently, this paper presents genetic algorithms to perform online tuning of a PID controller that would be evaluated for the system every time and above all take the parameter uncertainty (which is often neglected until now by many researchers) in consideration. In order to guarantee the best results as well as to ensure the robustness of the proposed controller, different search criteria are implemented. This includes Integral of Time multiplied by Absolute Error (ITAE), Integral of Absolute Magnitude of the Error (IAE), Integral of the Square of the Error (ISE), and Mean of the Square of the Error (MSE).
II. THE POWER PLANT FOR LFC
Physically a power system is characterized with complex nonlinear equations. During normal operations, only small changes in load are experienced. Consequently, it is sufficient to represent the power system dynamics in a
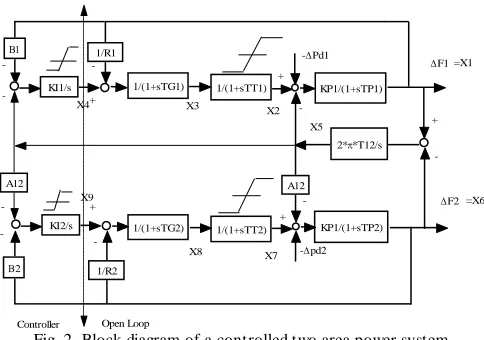
linearized form around the operating point. In a simplest representation, Fig. 1 illustrates a block diagram of a single area power system which can be modified to include the states for the tie line power in case of two or multi area power system as shown in Fig. 2. However, in this paper a single area with uncertain parameters will be tested.
P1 ______ 1+S*TP1
G1 _ _ _ _ _ _ 1+S*TG1
R1
f Pd
X1 X2
X3
PG1 XG1
KT1 (1+STT1)
Fig. 1. Block diagram of a single area power system
The dynamic equations for these two systems can be written in state space form as:
CX
Y
BU
AX
X
D(1)
Where A, B, and C are given in references [1, 2, and 9].
The above state vector can be represented by:
T E G
T
X
P
F
X
X
X
X
,
,
3
,
2
,
1
(2)
UD =
P
d1,
0
,
0
is the disturbance vector,For a two area power system we have,
T E G tie
E G
T
X
P
F
P
X
P
F
X
X
X
X
2 2 1
1
,
,
,
2
,
,
,
1
7
...,
,...
2
,
1
(3)
and,
UD =
P
d1,
0
,
0
,
0
,
P
d2,
0
,
0
(4)is the disturbance vector.
III. DESIGN PROCEDURES FOR TUNING PID
WIT H GA
International Journal of Engineering & Computer Science IJECS-IJENS Vol:12 No:06 53
KP1/(1+sTP1) 1/(1+sTT1)
1/(1+sTG1) 1/R1
KI1/s
KP1/(1+sTP2) 1/(1+sTT2)
1/(1+sTG2) KI2/s
2**T12/s
A12 A12
1/R2
2
-Pd1
-pd2
F1
F2 +
+
+
-+
+
-=X1
=X6 X5
X2
X7 X8
X4
X9
X3
Controller Open Loop
Fig. 2. Block diagram of a controlled two area power system
The genetic algorithm starts with no knowledge of the correct solution and depends entirely on responses from its environment and evolution operators (i.e. reproduction, crossover and mutation) to arrive at the best solution. By starting at several independent points and searching in parallel, the algorithm avoids local minima and converg es to suboptimal solutions. In this way, GAs have been shown to be capable of locating high performance areas in complex domains without experiencing the difficulties associated with high dimensionality, as may occur with gradient decent techniques or methods that rely on derivative information [25].
In this paper, the Matlab GAOT toolbox is implemented and Genetic Algorithms based on the previously mentioned four simulation steps are developed. Accordingly, an m-code (e.g. Initial_PID_GA_IAE_Hefron.m) is created to evaluate the optimum PID gain values for the system G(s). Also, an objective function is created in order to evaluate the PID values chosen by the Genetic Algorithm
(PID_objfun_IAE_Hefron.m). Actually, the overall
procedures are repeated for every optimization (search) criteria. In order to explain the methodology, following steps are accessed:
Step 1: Initializing the Population of the Genetic Algorithm:
Based on the MATLAB GA optimization Toolbox (GAOT), an m-code is written:
Whose commands should be adapted in accordance to the toolbox procedure individually as [29]:
PopulationSize: This command defines the population size.
VariableBounds: In this paper it is aimed to apply GA to optimize the gains of a PID controller, hence three strings will be assigned to each member of the population, these members will be comprised of a “P”, “I” and a “D” string that will be evaluated throughout the course of the GA. The three terms are entered into the genetic algorithm via the declaration of a three-row variablebounds matrix. The number of rows in the variablebounds matrix represents the number of terms in each member of the population.
The above m-code illustrates a population of eighty members being initialized with values randomly selected between -100 and 100. However, these limits may be changed according to simulation results.
EvalFN: The evaluation function is the declaration of the file name containing the objective function. Details of the necessary code for the objective function will be explained in the next step.
Options: Many of GA application uses binary encoded population as illustrated earlier. Because of its drawbacks (long time consumption due to conversion from/to binary and loss of precession plus memory consumption), in this paper real (floating point) numbers will be used to encode the population. This is clear in the options command of the above code, where the „1e-6‟ term is the floating point precision and the „1‟ term indicates that real numbers are being used (0 indicates binary encoding is being used).
Initialisega: This command combines all the previously described terms and creates an initial population of 80 real valued members between –100 and 100 with 6 decimal place precision.
Step 2: Defining an error performance criterion:
In this paper four different objective functions are defined. They are written in the m-code based on error performance criterion. All these objective function are fundamentally the same except for the section of code that defines the specific error performance criterion being implemented.
To optimize the performance of a PID controlled system, the PID gains of the system are adjusted to maximize or minimize a certain performance index. The performance index is calculated over a time interval T, which is normally limited to the region:
s
T
T
0
.
0
(2)
G(s)
PID C ontrolle r Initially de signe d by Zie gle r-Nichols, The n tune d throgh GA
Open Loop LFC model
with unce rtain parame te rs
Unit Step:
Input=1.0 Error(i)
Actual Output = y(i)
y(i)
GA Tuning Criteria:
MSE ISE IAE ITAE
KI
Kp
KD
F
Fig. 3. Block Diagram of Power system and PID controller.
Where: Ts is the settling time of the system. The four
International Journal of Engineering & Computer Science IJECS-IJENS Vol:12 No:06 54
TABLE I
MATHEMATICAL DESCRIP TION AND M-CODE FOR THE DIFFERENT
SEARCH CRITERIA
Performance Criteria
S ymbol Mathematical
description of the error
Mean of the square of the Error
MSE
n
i t e n MSE I
1 2 )) ( ( 1
Integral of the Square of the Error
ISE
T dt t e ISE I
0 ) ( 2
Integral of Absolute Magnitude of the Error
IAE
T
dt
t
e
IAE
I
0
)
(
Integral of Time multiplied by Absolute Error
ITAE
T
dt
t
e
t
ITAE
I
0
)
(
Step 3: Initializing the Genetic Algorithm:
To initialize the GA, following m-code is written whose commands are adapted according to the GA toolbox [29] individually as:
Bounds: This command sets the bounds within which
the genetic algorithm will search. These bounds may be different from the ones used to initialize the population in step 1 and they define the entire search space for the genetic algorithm.
startPop: Same as the previously mentioned “initPop”.
Opts: The options for the Genetic Algorithm consist of the precision of the string values i.e. 1e-6, the declaration of real coded values, 1, and a request for the progress of the GA to be displayed, 1, or suppressed, 0.
TermFN: This command is used to terminate the genetic
algorithm once certain criterion has been met. In this paper, every GA will be terminated when it reaches a certain number of generations using the “maxGenTerm” function.
TermOps: This command defines the options, if any, for
the termination function. In this example the termination options are set to 100, which mean that the GA will reproduce one hundred generations before terminating. This number may be altered to best suit the convergence criteria of the genetic algorithm i.e. if the GA converges quickly then the termination options should be reduced.
SelectFN: Normalized geometric selection
(„normGeomSelect‟) is the primary selection process to be used in this paper. In addition to the “Stochastic Universal Sampling” selection, the MATLAB GAOT toolbox provides three selection functions:
(i) Normalized Geometric selection. (ii) Tournament selection.
(iii)Roulette Wheel selection.
However, there is also a selection method called “Stochastic Universal Sampling” which is not included in
GOAT. All these selection methods are based on the same principal of giving fitter chromosomes a larger probability of selection. Tournament selection has a longer compilation time than the rest and as the overall run time of the genetic algorithm is an issue, tournament selection will not be used. The roulette wheel option is inappropriate since multiple copies of the same string may be selected for reproduction and the fitter strings should begin to dominate. However, in some situations unbelievable results may take place when the weakest string dominates the selection process.
SelectOps: When using the „normGeomSelect‟ option,
the only parameter that has to be declared is the probability of selecting the fittest chromosome of each generation, in this paper this probability is set to 0.08.
XOverFN: Arithmetic crossover was chosen as the
crossover procedure. Single point crossover is too simplistic to work effectively on a chromosome with three alleles; a more uniform crossover procedure throughout the chromosome is required. Heuristic crossover was discarded because it performs the crossover procedure a number of times and then picks the best one. This increases the compilation time of the program and is undesirable. The Arithmetic crossover procedure is specifically used for floating point numbers and is the ideal crossover option for our system.
XOverOptions: This is where the number of crossover points is specified. In the above m-code, the number of crossovers points is set to 4.
mutFNs: The “multiNonUnifMutation”, or multi
non-uniformly distributed mutation operator, was chosen as the mutation operator since it is efficient with multiple variables.
MutOps: The mutation operator takes in three options when using the „multiNonUnifMutation‟ function. The first is the total number of mutations, normally set with a probability of around 0.1%. The second parameter is the maximum number of generations and the third parameter is the shape of the distribution. This last parameter is set to a value of two, three or four where the number reflects the variance of the distribution.
Step 4: Performing the Genetic Algorithm:
The genetic algorithm is accomplished using the following command [29]:
[x,endPop,bPop,traceInfo]=ga(bounds,eval
FN,evalOps,startPop,opts,...
termFN,termOps,selectFN,selectOps,xOverF Ns,xOverOps,mutFNs,mutOps);
Once this command is entered, the genetic algorithm will iterate until it fulfills the criteria described by its termination function mentioned in the above step and, accordingly, returns four variables:
(1)The best population found during the GAx. (2)The GA‟s final population endPop.
International Journal of Engineering & Computer Science IJECS-IJENS Vol:12 No:06 55 (4)The best value and average value for each generation
traceInfo.
IV. RESULT S AND DISCUSSION
In order to evaluate which of the previously mentioned four performance criterion produce the best results when used in conjunction with a genetic algorithm, an objective function was created for each individual performance criterion. The same Genetic Algorithm was used for each objective function. In the Matlab m-Code, the genetic algorithm was initialized with a population of “thirty” and was iterated for 200 generations. The total number of mutations was set to “three” and each of the bounds was set to lie between +10 and +110 and the best population is plotted. This gives an insight into how the genetic algorithm converged to its final values as illustrated in Fig. 4.
Fig. 4. Convergence of the best population to the final values of PID, on this run these values are settled at: [10.9870, 2.4826, and 16.5885], an
arbitrary T F is used.
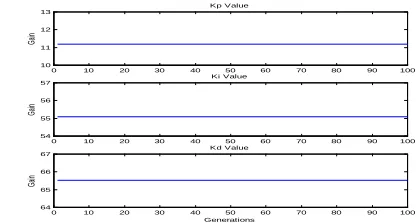
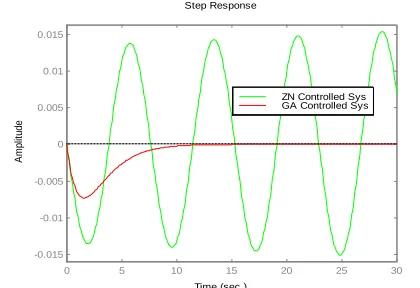
Fig. 4 is obtained assuming an arbitrary transfer function (not necessary that of our power s ystem) just to show the PID variation with population. In this paper, the genetic search criteria are applied only for a single area power system taking the parameter uncertainties in considerations. Actually for our system and for the “ITAE” criterion one gets the results of Fig. 5. the corresponding step response is like the one illustrated in Fig. 6 which shows the superiority of the PID controller tuned with GA over the response if only Ziegler-Nichols is implemented for the PID controller design.
Fig. 5. Convergence of the best population to the final values of PID for the power system under study. T he PID parameters are settled at: [11.1862,
55.0857, and 65.5315].
Fig. 6. Step response for the controlled power system comparing the step response of GA tuned PID and PID controller designed with Ziegler
-Nichols (IT AE-Algorithm-Nominal Parameters).
To show the impact of the proposed controller for damping the load frequency control under power system parameter variations, significant tests has been proceeded for uncertainty limits as shown in table II at which the nominal plant parameters of a single area in addition to the actual parameters assuming an uncertainty range of
40%.Where,
TPi : ith subsystem-model (area) time constant. Kpi : ith subsystem gain.
TTi : ith turbine time constant. TGi: ith governor time constant.
Ri: ith subsystem speed regulation due to the ith governor action “Hz p.u. MW”
TABLE II
PARAMETERS OF A SINGLE AREAS P OWER SYSTEM ASSUMING
UNCERTAINTY RANGE OF
40%Parameter Nominal +20% -20%
TPi 20.00 28 12.0
KPi 120.00 168 72.0
TTi 0.30 0.42 0.18
TGi 0.08 0.112 0.048
Ri 2.4 2.4 2.4
A single area LFC model with parameter uncertainties ranging from ±40% has been tested. Simulation results showed that either the MSE or ISE objective function should be chosen as the primary performance criterion. Transient response associated with these two objective functions are characterized with small rise time, long settling time, and small overshoot. The four proposed search criteria has been thoroughly tested for the single area LFC power system model and many results has been obtained. For the sake of paper size only the significant results are shown here. In contrary to the Fig. 6, Fig. 7 and 8 shows that one can obtain the best results of PID controller parameters if either the Integral of the Square of the Error (ISE), or the Mean of the Square of the Error (MSE) research criterion is applied to tune the PID parameters. It is clear also from these Fig.s that the conventional Ziegler-Nichols are no longer valid to introduce the enough damping for the area frequency deviations (Fig. 7) if the parameters the area are +20% uncertain. Moreover, shows
0 10 20 30 40 50 60 70 80 90 100
8 10 12 14
Kp Value
G
ai
n
0 10 20 30 40 50 60 70 80 90 100
0 5 10 15
Ki Value
G
ai
n
0 10 20 30 40 50 60 70 80 90 100
16 18 20 22 24
Kd Value
Generations
G
ai
n
Time (sec.)
A
m
pl
itu
de
Step Response
0 5 10 15 20 25 30
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0
x 10-3
ZN Controlled Sys GA Controlled Sys
0 10 20 30 40 50 60 70 80 90 100
10 11 12 13
Kp Value
Ga
in
0 10 20 30 40 50 60 70 80 90 100
54 55 56 57
Ki Value
Ga
in
0 10 20 30 40 50 60 70 80 90 100
64 65 66 67
Kd Value
Generations
Ga
International Journal of Engineering & Computer Science IJECS-IJENS Vol:12 No:06 56 that Ziegler-Nichols fails completely (Fig. 8) at ±40
parameter change to retain the frequency deviations to its nominal steady state value.
Fig. 7. Step response for the controlled power system comparing the step response of GA tuned PID and PID controller just designed with Ziegler
-Nichols (ISE-Algorithm-+20% Uncertainty).
Fig. 8. Step response for the controlled power system comparing the step response of GA tuned PID and PID controller just designed with Ziegler
-Nichols (MSE-Algorithm / +40% Uncertainty).
V. CONCLUSIONS
This paper has presented a genetically tuned PID controller to replace the conventional LFC. Four different search criteria are implemented to ensure the robustness of the proposed controller. This include: Integral of Time multiplied by Absolute Error (ITAE), Integral of Absolute Magnitude of the Error (IAE), Integral of the Square of the Error (ISE), and Mean of the Square of the Error (MSE). In order to evaluate which of these performance criteria produce the best results when used in conjunction with a genetic algorithm, an objective function was created for each individual performance. Results showed that ISE and MSE are the most efficient algorithms to tune the PID controller. It has been found out that proposed controller give superior performance compared to conventional PID controllers. An important contribution for the proposed methodology of this paper is that it has overcome the conventional controller failure in case of systems with uncertain parameters. However, the author of this paper is trying now to extend the methodology to be applied for a hybrid two power systems. Initial results of this research show that the load frequency oscillations can be minimized in case of implementing genetically tuned PID controllers in local areas. Such results will encourage generalizing the method for the design of local as well as central controllers
for the common case of multi area power systems. Some developments should be added to the algorithm in order to guarantee the stability of the multi area power systems .
REFERENCES
[1] Fosha, C.E.,Elgerd, O.I., Load-frequency control of power systems: A Reassessment, Proc. SEEE ,October,1969, Washington D.C.
[2] Elgerd, O.I., Electric Energy System T heory: An Introduction, McGraw-Hill Inc., 1971 (Book).
[3] Fosha, C.E.,Elgerd, O.I., Optimum megawatt-frequency control of multi area electric energy systems: A new approach via optimum control theory, IEEE T rans. 1970, PAS-89, pp.556-563. [4] Fosha, C.E.,Elgerd, O.I., T he megawatt -frequency control of
interconnected power systems: A new approach via optimum control theory‟, IEEE T rans. 1970, PAS-89, pp.563-567. [5] Cavin, R.K., Budge, M.C. and Rasmussen, P., An optimal linear
system approach to load-frequency control, IEEE T rans.1971, PAS-90, pp. 2472-2482.
[6] Moorthi, V.R., and Aggarwal, R.P., Suboptimal and near optimal control of a load-frequency control system, Proc.IEE 1972, 119(11), pp.1653-1660.
[7] Kothari, M.I., Satsangi, P.S. and Nanda, J., Sampled data automatic generation control of interconnected reheat thermal systems considering generation rate constraints, IEEE Trans.1981, PAS-100, pp.2334-2342.
[8] Hiyama, T ., Design of decentralised load-frequency regulators for interconnected power systems, Proc.IEE 1982, 129,(1),pp.17 -23. [9] Kumar, A., Discrete load frequency control of interconnected power system, International journal of energy system 1989, Vol. 9, No. 2, pp.73-79.
[10] Abdel-Hamid, A.M., El-Hefnawy, A.A. , Osheba, S.M. and Nour Eldin, H.A., Real time stabilizing signal generation for Subsynchronous Resonance (SSR) damping through nonlinear synchronous generator observer‟, Proc. of the IMAC-IFAC Intren. Symp, Parallel and distributed computing in engineering systems P.D.COM‟1991, Corfu, Greec, 1991, pp.537-544.
[11] Abdel-Hamid, A.M., Osheba, S.M. and Nour Eldin, H.A., Design and implementation of a physically realizable state observer for damping SSR oscillations, Proc. of the 2nd. IAST ED intern.conf.on “computer application in industry”, Alexandria, Egypt, 1992, pp.55-58.
[12] Wang, Y, Zhu, R. and Wen, C., Robust load-frequency controller design of power systems, Proc. IEE 1993, vol.140,Pte.c,No.1, pp.11-16.
[13] Lim, K.Y.,Wang,Y.and Wen, C., Robust decentralised load-frequency controlof multi-area power systems, Proc. IEE Sep.1996, vol.143,Pte.c,No.5, pp.377 -386.
[14] Jalili, A., Shayeghi, H., Fard,M.M., Application of Fuzzy logic Controller Based on LFC in the Restructured Power System Including SMES, Australian Journal of Basic and Applied Sciences 2011, 5(9): 1658-1670.
[15] Wu Chi-Jui; Hsu Yuan-Yih, Design of self-tuning PID power system stabilizer for multimachine power systems, IEEE T ransactions on Power Systems, Volume 3, Issue 3, Pp. 1059 -1064, Aug. 1988.
[16] Hjdfhjs Linkens, D.A. and Nyongesa, H.O., Genetic algorithms for fuzzy control, IEE Proc. Control Theory Appl., Vol. 142, No. 3, pp.161-185, 1995.
[17] Chian-Chuang Ding; King-T an Lee; Chee-Ming T sai; T song-Liang Huang, Optimal design for power system dynamic stabilizer by grey prediction PID control, IEEE International Conference on Industrial T echnology, 2002, IEEE ICIT '02, Volume 1, Pp. 279 -284, 11-14 Dec. 2002.
[18] Dobrescu, M., Kamwa, I., A new fuzzy logic power system stabilizer performances, IEEE PES, Vol. 2, Pp. 1056 -1061, 10-13 Oct. 2004.
[19] Kristiansson, B. and Lennartson, B, Robust Tuning of PI and PID controller, CONT ROL SYST EMS MAGAZINE, pp. 55 -69, FEBRUARY 2006.
[20] Mishra, S., Neural-network-based adaptive UPFC for improving transient stability performance of power system, IEEE T ransactions on Neural Networks, Volume 17, Issue 2, Pp.461 -470, March 2006.
Time (sec.)
A
m
p
lit
u
d
e
Step Response
0 5 10 15 20 25 30
-0.01 -0.005 0 0.005 0.01 0.015
Ziegler-Nicholes PID Genetic Algorithm PID
Time (sec.)
A
m
p
lit
u
d
e
Step Response
0 5 10 15 20 25 30
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
International Journal of Engineering & Computer Science IJECS-IJENS Vol:12 No:06 57
[21] Arvanitis, K.G., Pasgianos, G.D., Kalogeropoulos, G., T uning PID controllers for a class of unstable dead time processes based on stability margins specifications”, Mediterranean Conference on Control & Automation MED‟07, Pp. 1-9, 27-29 June 2007. [22] Hakim, Ermanu A.; Suprijanto, Adi; Maurdhi, Heri P., PSS based
on optimal fuzzy PID with Particle Swarm Optimization, IEEE- IPEC 2007, Pp.1396-1400, 3-6 Dec. 2007.
[23] Kundur, Prabha, Power System Stability And Control, McGraw-Hill, 1994.
[24] Abdel-Hamid, A.M. and H.A. Nour Eldin, A Modal Analysis Based Load Frequency - Control Considering Parameter Uncertainties And Generation Rate Constraints, T he 42nd Internationales Wissenschaftliches Kolloquim, Band.3, pp. 705 -710, T echnische Universitaet Ilmenau, Germany, sept.1997. [25] O‟Mahony, T ., Downing,C.J. and Klaudiuz, F., Genetic
Algorithms for PID Parameter Optimisation: Minimising Error Criteria, available at: http://zas.ie.pwr.wroc.pl/kf_glas00.pdf [26] Surya Prakash, Sunil Kumar Sinha, Ajay Shekhar Pandey and
Brijesh Singh, Impact of slider gain on load frequency control using fuzzy logic controller, ARPN Journal of Engineering and Applied Sciences, VOL. 4, NO. 7, SEPT EMBER 2009. [27] Shanmuga Sundaram, V. et al. A novel approach of load frequency
control in multi area power system, International Journal of engineering Science and Technology (IJEST ), Vol. 3 No. 3 Mar 2011.
[28] Ndubisi Samuel, N., A single area load frequency control: a comparative study based on PI optimal and fuzzy logic controllers, American journal of scientific and industrial research, Pp 748 - 754, 2011.
[29] Genetic Algorithm Toolbox User’s Guide, Mathworks, 2012.
Alwadie , A. is an Assistant Professor at Department of Electrical Engineering, Najran University, Saudi Arabia. He is currently the vice dean for the college of Engineering. He received his B.S. in Electrical Engineering from T ri state University (USA) in 1993, and his both M.S. and PhD in Electrical Engineering from Wayne state University (USA) in 1999 and 2003 respectively. Professor Alwadie has published many papers in the area of Fuzzy and control systems. He also reviewed IEEE Conference journal papers.