Research Article
July
2017
Computer Science and Software Engineering
ISSN: 2277-128X (Volume-7, Issue-7)
Recognition of Birds in Blurred and Illumination Images by
Local Features
Suresha .M*
Assistant Professor, Department of Computer Science & Kuvempu University, Karnataka, India
Sandeep
Research Scholar, Department of Computer Science & Kuvempu University, Karnataka, India
DOI: 10.23956/ijarcsse/V7I7/0128
Abstract — Local features are of great importance in computer vision. It performs feature detection and feature matching are two important tasks. In this paper concentrates on the problem of recognition of birds using local features. Investigation summarizes the local features SURF, FAST and HARRIS against blurred and illumination images. FAST and Harris corner algorithm have given less accuracy for blurred images. The SURF algorithm gives best result for blurred image because its identify strongest local features and time complexity is less and experimental demonstration shows that SURF algorithm is robust for blurred images and the FAST algorithms is suitable for images with illumination.
Keywords— Classification, FAST, Harris Corner, Pattern Recognition, SURF.
I. INTRODUCTION
Several research works done by computer vision based on local features algorithms. The purpose of local features is to provide a representation that allows to efficiently match local structures between images. Local Feature algorithms contains feature detection and image matchings are two major tasks in computer vision and computer graphics. In this work, recognition of birds has been carried-out using features as SURF, FAST, and HARRIS. In the global feature extraction, it gives over segmentation. So, it can’t be used when deal with complex problems in segmentation and object recognition. The local features of images have important characteristics that can be used for distinguishing different objects in machine vision fields. Local Feature Extraction used to image transformations such as rotation, scale, illumination, noise and affine transformations. (1) Scale helps at least two elements of image views in different scales. (2) Blurring can solve the problem of a noises to identify objects in photometric images. (3) Noise removes unwanted content of images. (4) Rotation helps to rotate images for the needed application. (5) Affine Transformation to check whether a planar, textured or edge object. (6) Changes in illumination also participate in a typical problem for accurate feature matching [8], [16], [20], [5]. Scale-invariant feature transform (SIFT) is a local feature detection technique developed by Lowe [3] for extracting distinctive invariant features from images that can be invariant to scale and rotation of images. The SIFT algorithm has four main steps: (1) Scale Space Extrema Detection, (2) Key point Localization, (3) Orientation Assignment and (4) Description Generation [17]. To the identify location and scales of key points using scale space extrema in the DoG (Difference-of Gaussian) functions with different values of σ [10]. It is accurate and efficiently work in mosaic images recognition and retrieval [12].
Speed-Up Robust Features(SURF) is a local feature detection method developed by Herbert Bay and Tuytelaars [6], it is inspiration of SIFT and three-time better than SIFT. SURF extract the local robust features. SURF uses scale and rotation-invariant interest point detector and descriptor which outperforms with respect to repeatability, distinctiveness, and robustness [18]. The SURF is the local feature techniques, investigate local features and give accurate results for blurred images, Illumination images and photometrics image etc. The task of finding point correspondences between two images of the same object is a part of many computer vision applications. It states to have more discriminative power than other state-of-the-art features such as SIFT [3], yet to be computed more efficiently and yields a lower dimensional feature descriptor resulting in faster matching. The construction of the SURF features is quite convenient also for hierarchical approaches. Initially, for the first rough steps of the hierarchy, a faster and smaller feature descriptor vector can be extracted [1]. SURF’s detector and descriptor are not only faster, but it is also more repeatable and the latter more distinctive. It useful in many fields, such as object recognition and object tracking, features analysis visible and infrared images [19]. In our work, recognition of birds has been done using SURF, which gives good results for blurred and illumination images.
The Features from Accelerated Segment Test(FAST) Edward Rosten and Tom Drummond [4] presented for recognition of interest points in an image. FAST is successful in detection of robust features in any given image. It identifies the features based-on corners. Feature detectors such as SIFT (Difference of Gaussian), Harris and SUSAN are good methods which yield high quality features, however they are too computationally rigorous for use in real-time applications of any complexity. machine learning is one of the method to derive a feature detector. There are also many other feature detection methods, as edge detection, corner detection, etc. Different methods have their own advantages [11]. This paper focuses on recognition of birds using FAST techniques, but FAST gives poor result for blurred images.
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
detect entire right corner without issuing any false results and have capability to locate these positions precisely. The detector should be efficient for application involving real-time data and robust to noise images. Corner detection algorithms can be mainly divided into two catalogues, namely, geometry based and template based algorithms [21]. A corner is defining as the intersection of two edges or point for which there are two dominant and different edge directions in the local neighbourhood of a point. An interesting point is a point in an image, which has well-defined position and robustly detected. This means that an interesting point can be a corner but it can also be an isolated point of local intensity maximum or minimum, line endings or a point on a curve where the curvature is locally maximal. but it gives poor result for blurred images.
II. RELATED WORK
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
is invariant to various radiometric variations to use Adaptive Normalized Cross Correlation (ANCC) for robust and accurate correspondence measure. Y. Mao et al. [21] proposed an improved algorithm of Harris detection algorithm based on the neighboring point eliminating. Z. Zhou et al. [22] presented combined SURF feature detection with the Mean-shift tracking, which matches the SURF feature in the target of current and previous frames, calculate their orientation and proportion of scale to realize a scale and orientation changing tracking algorithm method. It reduces the time of detection, and makes corners distributing more homogenous so that avoids too many corners stay together.
III. PROPOSED METHODOLOGY
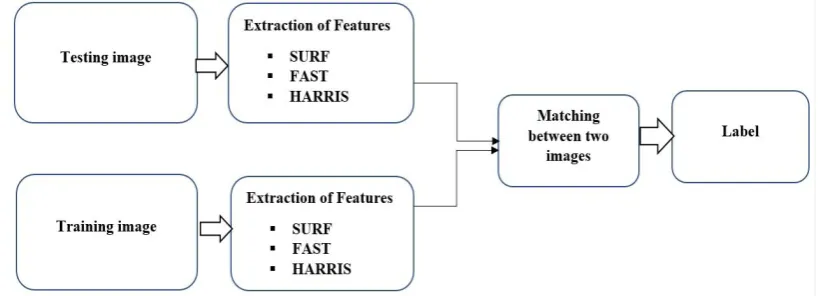
To the best of authors knowledge, it is a novel work for recognition of bird’s using local features. The proposed methodology is shown in figure 1. The SURF, FAST and HARRIS features are extracted from Training images and Testing images these features are described in the form of a vector. we found total of three features such as corner, blobs and T-junction. classification is carried out using classifier.
Fig. 1 Proposed methodology for recognition of birds
IV. SEGMENTATION
In this section, manual segmentation applied for this work. Figure 2 presents proposed segmentation approach. 1. Input RGB bird image.
2. Conversion for RGB to GRAY.
3. Apply edge detection and linking connector method for a gray level image. 4. The morphological dilation method for is applied to connect unconnected edge. 5. Convolutional of dilated image with gray level image.
Fig. 2: Sample birds image
V. FEATURE EXTRACTION TECHNIQUES
In the proposed methods, the SURF FST and HARRIS features have been extracted.
A. SURF
SURF performed in three major steps. The first step to select interesting point in distinctive locations in images, such as corners, blobs, and T-junctions. The most valuable property of an interest point detector (Hessian matrix) and this detector process repeatedly until finding the interest points under different viewing conditions. Next, a feature vector represents the neighbourhood of every interest point. This descriptor must be distinctive and at the same time robust to noise, detection displacements and geometric and photometric deformations. Finally, the descriptor vectors are matched between different images [13] and recognize the objects.
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
simultaneous processing and negates the need to subsample the image hence providing the performance increase. In our approach detector use Hessian matrix because of it gives good performance and accuracy, which automatically detect blob-like structures at locations where the determinant is maximum. Given a point image I, the Hessian matrix
X
,
H
in an X at scale is defined in equation (1).Fig. 3
L
yyandL
xy Discretised Gaussian and the approximationsD
yyandD
xy
)
,
(
)
,
(
)
,
(
)
,
(
,
X
L
X
L
X
L
X
L
x
H
yy xy xy xx (1) where
X
,
L
xx =
g
X
y
X
I
2 22
(2)
g
X
y
X
I
x
L
xy 22
,
(3)Here
L
xx
x
,
represents the convolutional Gaussian second order derivative
g
x
22
with the image I at point X,
where
2
2 2 2
2
2
1
e
x
y
g
similarly forL
xy
x
,
andL
yy
x
,
.The main aims of the SURF detection are non-maximal-suppression of the determinants of the Hessian matrices. The box filter is an approximation for Gaussian second order derivatives in SURF. It can perform very low computational cost using integral images and calculation time is independent of filter size.
I
X
x i
i 0
y j
j 0
x
y
I
,
(4)
The SURF algorithm approximates these kernels with rectangular boxes, box filters. This way it is possible to calculate approximated convolution effectively for arbitrarily sized kernel utilizing the integral image.
H
approx
D
xxD
yy
WD
xy
Det
(5)The approximated and discrete kernels are referred as
D
yy forL
yyandD
xy forL
xy . The W term is theoretically sensitive to scale but it can be kept constant at 0.9.(a) SIFT with left scale (b) SURF with right scale
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253 2) Descriptor: Descriptor provides a unique and robust description of interest point. A descriptor can apply on the area surrounding an interesting point, The SURF descriptor is used Haar wavelet responses and calculated efficiently for the integral images. It determines the distinctives orientation of each interest point, it is used to achieve rotational invariance before descriptor is calculated interest area surrounding the interest points are rotated to its direction. For the extraction of the descriptor, the first step is constructing a square region centred on the interesting point. The SURF descriptor describes an interesting area with size 20s. The interest area is divided into 4x4 subareas that is described by the values of a wavelet response in the x and y directions. The wavelet response in the x and y direction is referred to as
d
xandd
yrespectively. For each sub-area, a vector V is calculated based on 5x5 samples [18]. If we call the Haar wavelet response in a horizontal direction, vertical direction and Horizontal and vertical direction defined in relation to the selected interest point orientation as shown in figure 5. to increase the robustness towards geometric deformations and localization errors.
,
,
,
,
d
xd
xd
yd
yV
(6)Therefore, each sub-region contributes four values to the descriptor vector leading to an overall vector of length 4× 4×4= 64.
Fig 5: (a)To build the descriptor, an oriented quadratic grid with 4 *4 square sub-regions are laid over the interest point (left). (b)For each square, the wavelet responses are computed from 5*5 samples (for illustrative purposes show only 2*2 sub-divisions). For each field, collected the sums dx, |dx|, dy and |dy|computed relatively to the orientation of the
grid (right)
3) Matching: For the matching stages, consider only Hessian matrix detect the interesting point with use of Laplacian. Typically, the interest points found the blob structures. Laplacian identifies bright blobs on dark backgrounds from the reverse situation. as shown in figure 6. In matching stage, we only compare features if they have the same type of contrast, which helps to matching purpose.
Fig. 6: contrast matching between two interest points
B. FAST
FAST is an algorithm proposed originally by E. Rosten and T. Drummond [4] for identifying interest points in an image. An interest point in an image is a pixel which has a well-defined position and can be robustly detected. Interest points have high local information content and they should be ideally repeatable between different images. Interest point detection has applications in image matching, object recognition, tracking etc. R. muthukrishnan [14] proposed the method has three advances, first presented a new heuristic for feature detection, second, generalized the detector and finally, carried out a rigorous comparison of corner detector based on the above repeatability criteria and this method has both very fast and high quality. For each location on the circle
1
,
2
...,
16
, the pixel at the position relative to denoted by, can have in the three states.The algorithm FAST detection proposed by Pooja Ghosh [13]:
1) Select a pixel P in the image, it is an interesting point or not.
I
pintensity value.2) Select appropriate threshold value T.
3) Consider a circle of 16 pixels around the pixel P under test. (as shown in figure 7)
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
(a)interest point (b)closer view of the interest point Fig. 7: Sample image result for Fast algorithms procedure
5) A high-speed test was proposed to exclude many non-corners. This test examines only the four pixels at 1, 9, 5 and 13 First 1 and 9 are tested if they are too brighter or darker. If so, then checks 5 and 13. If P is a corner, then at least three of these must all be brighter than
I
p
T
or darker thanI
p
T
. If neither of these is the case, then P cannot be a corner.This detector exhibits high performance, but there are several weaknesses:
-The choice of pixels is not optimal because its efficiency depends on ordering of the questions and distribution of corner appearances.
-Results of high-speed tests are thrown away.
-Multiple corner features are detected adjacent to one another.
-There are some disadvantages of this algorithm. First, the algorithm does not work extremely well in all cases. When n>12, then the number of interest points identified are very low. For example, a blurred image. Fig. 10 shows the FAST algorithms detect the features for blurred image.
C. HARRIS-CORNER
Harris corner detection algorithms detect feature points by designing a local detecting window in image. It is easy to compute and is fast enough to work on computers. Also, it is popular because rotation, scale and illumination variation independent. A mathematical formula approach for determining whether the region found is flat, edge or corner is provided by Harris corner detection algorithm shown in fig. 8. This algorithm provides more number of features. Though it is found to be scale variant, but it is invariant to rotation. The idea of interest point detection or corner detection is not new. There are several well-established algorithms are Moravec corner detection algorithm, Harris & Stephens corner detection algorithm, SUSAN corner detector are well-established algorithms. Equation 7 explains the mathematical formula for Harris & Stephens corner detection algorithm [22].
(a) Flat region (b) Edge region (c) Corner region Fig.8: Condition for Harris corner detection condition.
Consider a grayscale image
I
. sweep a window (with displacementsu
in the x direction andv
in the right direction) I and will calculate the variation of intensity.
2,
,
,
,
,
v
w
x
y
I
x
u
y
v
I
x
y
u
E
y x
(7)where:
x
y
w
,
is the window at position
x
,
y
x
y
I
,
is the intensity at
x
,
y
x
u
y
v
I
,
is the intensity at the moved window
x
u
,
y
v
Since we are looking for windows with corners, we are looking for windows with a large variation in intensity. Hence, we must maximize the equation above, specifically the term:
Auto-correlation function is defined as,
2,
,
,
,
y x
y
x
I
v
y
u
x
I
v
u
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
Using Taylor expansion:
2, , , , ,
y x yx vI I x y
uI y x I y x w v u
E (9)
Expanding the equation and cancelling properly:
y x y xvl
ul
y
x
w
v
u
E
,,
,
(10)Substitute Simplification for equation 11-16:
y x y xl
l
v
u
y
x
w
v
u
E
,
,
,
, (11)
v
u
l
l
l
l
v
u
y
x
w
v
u
E
x yy x y x,
,
,
(12)
v
u
l
l
l
l
y
x
w
v
u
v
u
E
y x y x y x ,,
,
(13)
yx x y y y
y x x x
l
l
l
l
l
l
l
l
y
x
w
M
,,
(14)
v u M v u v uE , (15)
u
v
E
,
is an equation of an ellipse, when M is the Covariance. Let
1 and
2 eigen values of M.A score is calculated for each window, to determine if it can possibly contain a corner:
2det
M
k
trace
M
R
(16)where:
M
1
2Det
M
1
2trace
A window with a score R greater than certain value is consider corner.
D. CLASSIFIER
In this paper, matching features is important task. Matching features perform SAD (Sum of Absolute Differences), SSD (Sum of Squared Differences) and NCC (Normalized Cross-Correlation) [9].
1) SAD: The SAD is a measure of the similarity between image blocks. It is calculated by taking the absolute difference between each pixel in the original block and the corresponding pixel in the block being used for comparison. The sum of absolute differences is used as a distance matric for bird’s recognition.
n i n jj
g
i
f
SAD
1 1 (17)Computation of differences between corresponding elements
d
ij
f
i
g
j
.Determine the absolute value of each differences
d
ij . Add all absolute values.2) SSD: The SSD is one of method to measure of match that based on pixel by pixel intensity differences between the two images. It calculates the summation of squared for the product of pixels subtraction between two images [15]. With this similarity measure, matching point can be determined by consider the location of minimum value in the image matrices. Generally, SSD is directly using the formulation of sum of square error [9].
2
A
g
f (18)
The equation 19 represented in discrete form:
20 0
,
,
,
M i N jv
j
u
i
g
j
i
f
j
i
SSD
(19)ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253 3) Normalized 2-D cross correlation:normxcorr2 uses the following general procedure,
1. Calculate cross-correlation in the spatial or the frequency domain, depending on size of images. 2. Calculate local sums by precomputing running sums.
3. Use local sums to normalize the cross-correlation to get correlation coefficients. The implementation closely follows the formula from [7]:
5 . 0
,
2 _ 2
,
_
, ,
_ _
,
,
,
,
,
,
y x y
x uv
y
x uv
t
v
y
u
x
t
f
y
x
f
t
v
y
u
x
t
f
y
x
f
v
u
(20)
VI. EXPERIMENTAL RESULTS
In this work 20 bird images have been considered to conduct an experiment. Fig.12 shows sample bird’s data set. SURF algorithm has been applied illuminated image for feature extraction, the segmented results are shown in figure.9 and fig.2. fig.10 shows sample experiment result using FAST algorithms for blurred image. Figure.11 shows sample experiment result using SURF algorithms for blurred image. FAST and HARRIS algorithms not gives effective result for blurred image but, SURF algorithms gives accurate result for blurred and FAST gives best result for illumination images. Table 1 show the experimental result for blurred and illumination images by local features based on time complexity.
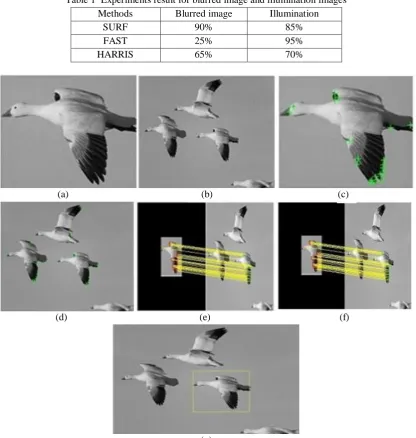
Table 1 Experiments result for blurred image and illumination images
Methods Blurred image Illumination
SURF 90% 85%
FAST 25% 95%
HARRIS 65% 70%
(a) (b) (c)
(d) (e) (f)
(g)
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
(a) (b) (c)
(d) (e)
Fig. 10 Recognition of bird in blurring images using FAST algorithms: (a)Testing image (b)Training image (c) No Interest points for testing image (d)Some of Interest points for training image (e) No matching between two images
(a) (b) (c)
(d) (e) (f)
(g)
Fig. 11. Recognition of bird in blurred images using SURF algorithms: (a)Testing image (b)Training image (c)Interest points for testing image (d)Interest points for training image (e)Extract feature descriptor (f) Matching between testing
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
Fig. 12: Sample bird’s data set
VII. CONCLUSION
In this paper, discussed three local features method for recognition of bird images. SURF is fast and good performance compare to FAST and HARRIS methods for blurred image. It was concluded that SURF has the best overall performance for recognition of blurred image. And FAST and HARRIS algorithms only consider for corner detection for that reasons unable to detect complete contour of an object (blurred image) and FAST gives best result for illumination images compare to SURF and HARRIS algorithms.
REFERENCES
[1] A. C. Murillo, J. J. Guerrero and C. Sagues, “SURF features for efficient robot localization with omnidirectional images,” IEEE International Conference on Robotics and Automation, Roma-Italy, pp. 3901-3907, 2007. [2] Chris Harris & Mike Stephens, “A combined corner and edge detector,” Proceedings of The Fourth Alvey
Vision Conference Manchester, UK, pp. 147-151, 1988.
[3] David G Lowe, “Distinctive Image Features from Scale-Invariant Keypoints,” International Journal of Computer Vision, vol.60, no. 2, pp.91-110, 2004.
[4] E. Rosten and T. Drummond, “Machine Learning for High-speed Corner Detection,” Proceedings of the 9th European Conference on Computer Vision, vol.3951, pp. 430-443, 2006.
[5] Engr.Farman Ali, Engr.Sajid Ullah Khan Engr.Muhammad Zarrar Mahmudi and Rahmat Ullah,” A Comparison of FAST, SURF, Eigen, Harris, and MSER Features,” International Journal of Computer Engineering and Information Technology (IJCEIT), Vol.8, Issue 6, pp. 100-105, June 2016.
[6] Herbert Bay, Andreas Ess, Tinne Tuytelaars and Luc Van Gool, “Speeded-Up Robust Features (SURF),” ELSEVIER, Computer Vision and Image Understanding, Vol.110, Issue 3, pp. 346-359, 2008.
[7] J. P. Lewis, “Fast Normalized Cross-Correlation,” Industrial Light & Magic, 1995.
[8] K. Mikolajzyk and C.Schmid, “A performance evaluation of local descriptor,” IEEE Transaction on Pattern Analysis and Machine Intelligence, vol.27, no.10, pp. 1615-1630, 2005.
[9] L Di Stefano and S Mattoccia, “Fast Template Matching using Bounded Partial Correlation,” Machine Vision and Applications, vol. 13, pp. 213–221, 2003.
ISSN(E): 2277-128X, ISSN(P): 2277-6451, DOI: 10.23956/ijarcsse/V7I7/0128, pp. 243-253
[11] Nagham Hamid, Abid Yahya, R. Badlishah Ahmad, and Osamah M. Al-Qershi, “A Comparison between Using SIFT and SURF for Characteristic Region Based Image Steganography,” IJCSI International Journal of Computer Science Issues, vol. 9, Issue 3, no. 3, pp. 110-116, 2012.
[12] P M Panchal, S R Panchal and S K Shah, “A Comparison of SIFT and SURF,” IJIRCCE, International Journal of Innovative Research in Computer and Communication Engineering Vol.1, Issue 2, pp. 323-327, 2013. [13] Pooja Ghosh, Achala Pandey and Umesh C. Pati, “Comparison of Different Feature Detection Techniques for
Image Mosaicing,” ACCENTS Transactions on Image Processing and Computer Vision ISSN, Vol.1, Issue 1, pp. 1-7, 2015.
[14] R Muthukrishnan and J Ravi, “Image type-based Assessment of SIFT and FAST Algorithms,” International Journal of Signal Processing, Image Processing and Pattern Recognition vol.8, no.3, pp.211-216, 2015.
[15] S. Ourselin, X. Pennec, R. Stefanescu, X. Pennec, and R. Stefanescu, “Robust Registration of Multi-Modal Medical Images,” Towards Real-Time Clinical Applications, 2001.
[16] S. Sarin, M. Fahrmir, M. Wanger and W. Kameyama, “Holistic feature extraction for automatic image annotation,” 2011 Fifth FTRA International Conference on Multimedia and Ubiquitous Engineering, pp. 59-66, 2011.
[17] Sahil Jain, Kiranmai Pulaparthi and Chetan Fulara, “Content based image retrieval,” IJAEGT, International Journal of Advanced Engineering and Global Technology, vol.03, Issue 10, pp. 1251-1258, 2015.
[18] Umma Hany and Lutfa Akter, “Speeded-Up Robust Feature Extraction and Matching for Fingerprint Recognition,” 2nd International Conferences on Electrical Engineering and Information & Communication Technology (ICEEICT), Bangladesh, pp.1-7, 2015.
[19] Xiaodong Li and Nabil Aouf, “SIFT and SURF Feature Analysis in Visible and Infrared Imaging for UAVs,” IEEE 11th International Conference, pp. 46-51, 2012.
[20] Y. Heo, K. Lee and S. Lee, “Illumination and camera invariant stereo matching,” computer vision pattern recognition (CVPR), pp. 1-8, 2008.
[21] Y. Mao and M. Lan, “An improved method for Harris corner detection,” Journal of Computer Technology and Development, pp. 36, 2009.