Available Online at www.ijpret.com 15
INTERNATIONAL JOURNAL OF PURE AND
APPLIED RESEARCH IN ENGINEERING AND
TECHNOLOGY
A PATH FOR HORIZING YOUR INNOVATIVE WORK
ANT COLONY OPTIMIZATION
ZARA A. R. PATHAN, NIKITA D. BHAD
Department of Information Technology, C. K. Thakur A.C.S. College, New Panvel, India
Accepted Date: 16/08/2014; Published Date: 01/09/2014
Abstract: Ant colony optimization (ACO) is a population-based metaheuristic inspired by the collective behavior of ants which is used for solving optimization problems to finding good paths through graphs. This paper overviews work on ant algorithms, that is, algorithms for discrete optimization which took inspiration from the observation of ant colonies and introduces the ant colony optimization (ACO) meta-heuristic. In the first part of the paper the basic biological findings on real ants are overviewed, and their artificial counterparts. In the second part of the paper a number of applications where this concept gives an appropriate solution are described.
Keywords: ACO, metaheuristic, Stigmergy, Capacitated Vehicle Routing Problem, Travelling Salesman Problem, Quadratic Assignment Problem, Graph Coloring Problem, Job Scheduling Problem.
Corresponding Author: MS. ZARA A. R. PATHAN
Access Online On:
www.ijpret.com
How to Cite This Article:
Zara Pathan, Nikita Bhad;IJPRET, 2014; Volume 3 (1): 15-30
Available Online at www.ijpret.com 16 INTRODUCTION
Ant Colony Optimization is a class of algorithms, whose first member, called Ant System, was initially proposed by Colorni, Dorigo and Maniezzo[3]. The main underlying idea is inspired by the behavior of real ants, over several constructive computational threads based on local problem data and on a dynamic memory structure containing information on the quality of previously obtained results.
More specifically, ACO is inspired by the ants’ foraging behavior. We may usually have N nodes
and A undirected arcs[10]. Ants work on the principle of Stigmergy i.e. indirect communication
via interaction with environment. There are two types of Stigmergy followed by ants. [2]First is
Sematonic stigmergy which is based on the action of agent directly related toproblem solving
and affects behavior of other agents. The second type is sign-based stigmergy which is based on
the action of agent affects environment not directly related to problem solving activity. There
Available Online at www.ijpret.com 17 Related work
ACO algorithms show similarities with some optimization, learning and simulation approaches like heuristic graph search, Monte Carlo simulation, neural networks, and evolutionary computation. These similarities are briefly discussed in the following.
Heuristic graph search: In ACO algorithms each ant performs an heuristic graph search in the space of the components of a solution: ants take biased probabilistic decisions to chose the next component to move to, where the bias is given by an heuristic evaluation function which favors components which are perceived as more promising.
Monte Carlo simulation: ACO algorithms can be interpreted as parallel replicated Monte Carlo systems. Monte Carlo systems are general stochastic simulation systems, that is, techniques performing repeated sampling experiments on the model of the system under consideration by making use of stochastic component in the state sapling and \ or transition rules. Analogously, in ACO algorithms the ants sample the problems solution space by repeatedly applying a stochastic decision policy until a feasible solution of the considered problem is built. Each ant "experiment" allows to adaptively modify the local statistical knowledge on the problem structure (i.e., the pheromone trails).
Neural networks: Ant colonies, being composed of numerous concurrently and locally interacting units, can be seen as "connectionist" systems.[13] From a structural point of view, the parallel between the ACO meta-heuristic and a generic neural network is obtained by putting each state I visited by ants in correspondence with a neuron I, and the problem specific neighborhood structure of state I in correspondence with the set of synaptic-like propagating through the neural network and modifying the strength of the synaptic-like inter-neuron connections. Signals (ants) are locally propagated by means of a stochastic transfer function and the more a synapse is used, the more the connection between its two end-neurons is reinforced.
Available Online at www.ijpret.com 18 counter obstacles on their longer side on their shorter side which makes the pheromone trail accumulate quicker on the shorter side. It is the ants preference for higher pheromone trail levels which makes this accumulation still quicker on the shorter path.
Advantages
• Positive Feedback accounts for rapid discovery of good solutions
• The greedy heuristic helps find acceptable solution in the early solution in the early stages
of the search process.
• Performs better than other global optimization techniques such as neural nets, genetic
algorithms etc.
• Can be used in dynamic applications (adapts to changes such as new distances, etc.)
• Convergence is guaranteed, but time to convergence uncertain.
Methodology
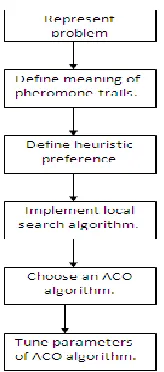
Steps for Solving a Problem by ACO:
1. Represent the problem in the form of sets of components and transitions, or by a set of
weighted graphs, on which ants can build solutions
Available Online at www.ijpret.com 19
3. Define the heuristic preference for the ant while constructing a solution
4. If possible implement a efficient local search algorithm for the problem to be solved.
5. Choose a specific ACO algorithm and apply to problem being solved
6. Tune the parameter of the ACO algorithm.
Figure 1
Figure 1-Steps for problem solving
Applications
Routing
o TSP (Traveling Salesman Problem)
o Vehicle Routing
o Sequential Ordering
Assignment
o QAP (Quadratic Assignment Problem)
Available Online at www.ijpret.com 20
o Generalized Assignment
o Frequency Assignment
o University Course Time Scheduling
Scheduling
o Job Shop
o Open Shop
o Flow Shop
o Total tardiness (weighted/non-weighted)
o Project Scheduling
o Group Shop
Subset
o Multi-Knapsack
o Max Independent Set
o Redundancy Allocation
o Set Covering
o Weight Constrained Graph Tree partition
o Arc-weighted L cardinality tree
o Maximum Clique
Machine Learning
o Classification Rules
o Bayesian networks
Available Online at www.ijpret.com 21
Network Routing
o Connection oriented network routing
o Connection network routing
o Optical network routing
Work upto date
Chronology of Ant colony optimization algorithms is given as follows:
1959, Pierre-Paul Grassé invented the theory of Stigmergy to explain the behavior of nest
building in termites;
1983, Deneubourg and his colleagues studied the collective behavior of ants;
1988, and Moyson Manderick have an article on self-organization among ants;
1989, the work of Goss, Aron, Deneubourg and Pasteels on the collective behavior of
Argentine ants, which will give the idea of Ant colony optimization algorithms;
1989, implementation of a model of behavior for food by Ebling and his colleagues;
1991, M. Dorigo proposed the Ant System in his doctoral thesis (which was published in
1992). A technical report extracted from the thesis and co-authored by V. Maniezzo and A. Colorni was published five years later;
1996, publication of the article on Ant System;
1996, Hoos and Stützle invent the MAX-MIN Ant System;
1997, Dorigo and Gambardella publish the Ant Colony System;
1997, Schoonderwoerd and his colleagues developed the first application
to telecommunication networks;
1998, Dorigo launches first conference dedicated to the ACO algorithms;
1998, Stützle proposes initial parallel implementations;
Available Online at www.ijpret.com 22
2000, special issue of the Future Generation Computer Systems journal on ant algorithms;
2000, first applications to the scheduling, scheduling sequence and the satisfaction of
constraints;
2000, Gutjahr provides the first evidence of convergence for an algorithm of ant colonies;
2001, the first use of COA Algorithms by companies (Eurobios and AntOptima);
2001, IREDA and his colleagues published the first multi-objective algorithm;
2002, first applications in the design of schedule, Bayesian networks;
2002, Bianchi and her colleagues suggested the first algorithm for stochastic problem;
2004, Zlochin and Dorigo show that some algorithms are equivalent to the stochastic
gradient descent, the cross-entropy and algorithms to estimate distribution;
2005, first applications to protein folding problems;
2012, Prabhakar and colleagues publish research relating to the operation of individual ants
communicating in tandem without pheromones, mirroring the principles of computer network organization. The communication model has been compared to the Transmission Control Protocol.
Some problems with their efficient solutions
A. Traveling Salesman Problem (TSP)
Available Online at www.ijpret.com 23 Each ant maintains a “tabu list” of cities that it has already visited. It does not revisit any city.
While an ant builds a tour, it decides on the next city in a probabilistic manner, all the routes are updated and the shortest route is selected for the further process.
(i)
Available Online at www.ijpret.com 24 Considering the above diagram(i) if we assume that the nodes are cities n edges are the distance between them, then by applying ACO we can give the result by deterring the shortest path between them in diagram (ii) By taking number of iterations the shortest path is figured[9]. This will help the salesman to cover longer distance in proper manner and time.
B. Capacitated Vehicle Routing Problem (CVRP)
The Vehicle Routing Problem concerns the transport of items between depots and customers
by means of a fleet of vehicles.[11] The VRP can be instantiated to many real-world domains, examples are the milk float, mail delivery, school bus routing, solid waste collection, heating oil distribution, parcel pick-up and delivery, dial-a-ride systems, and many others. In general, solving a VRP means to find the best route to service all customers using a fleet of vehicles. The solution must ensure that all customers are served, respecting the operational constraints, such as vehicle capacity and the driver’s maximum working time, and minimising the total transportation cost.
The Capacitated Vehicle Routing Problem (CVRP) is the basic version of the VRP. The name derives from the constraint of having vehicles with limited capacity. By removing this constraint, and imposing that all customers must be served by a single route, the CVRP collapses into a standard Travelling Salesman Problem; it can therefore be shown that CVRP is NP. In the classic version of the CVRP, customer demands are deterministic and known in advance. Deliveries cannot be split, that is, an order cannot be served using two or more vehicles. The vehicle fleet is homogeneous and there is only one depot. The objective is to minimise total travel cost, usually expressed as the travelled distance required to serve all customers.
Initially there N customers are to be visited by K vehicles. We have been given the following details:
• Depots (number, location)
• Vehicles (capacity, costs, time to leave, time on road.)
• Customers (demands, time windows, priority.)
Available Online at www.ijpret.com 25 The problem can be formulated as a graph theoretic problem, where G = (V, A) is a complete graph, V the vertex set (customers, and the depot, usually labelled with 0) and A is the arc set (the paths connecting all customers and the depot). A non-negative demand qi is associated with each vertex, and a cost cij is associated with each edge in A. If the cost matrix associated with the graph, representing the distance or travel time, is asymmetric (a
common situation in urban contexts), then the problem is called the asymmetric CVRP.
In the first approach the objective function has the unique objective of minimising the total route length. To solve the problem, artificial ants construct the solution by successively choosing customers to visit, until each customer has been served. If selecting a customer leads to the violation of a constraint on the capacity or on the total route length, the route returns to the depot. When an artificial ant is at customer i, the next customer j is selected according to a random-proportional rule. To reduce the time taken to look for the next customer to visit, not all customers are evaluated, but only those appearing in a candidate list. A typical way to build a candidate list is to sort customers by their distance from the current node examine only the first customers in the list. Bullnheimer et al. implement a variant of the Ant System. The pheromone trail is updated whenever an artificial ant k computes a solution k, which is evaluated in the objective function as Jk. It was found that the number of ant’s m should be equal to the number of customers and that one ant is placed at each customer at the beginning of an iteration.
C. The Quadratic Assignment Problem (QAP)
The QAP is a combinatorial optimisation problem stated for the first time by Koopmans and
Beckman1 in 1957. It can be described as follows: Given two n n matrices A=(aij) and
B=(bij),find a permutation p. In practice, a large number of real world problems lead to QAP
Available Online at www.ijpret.com 26 image processing requires solving more than 100 problems of size n = 256 (Taillard3).[12] The use of heuristic methods for solving large QAP instances is currently the only practicable solution. The idea of imitating the behaviour of ants for finding good solutions to combinatorial optimization problems was initiated by Dorigo, Maniezzo and Colorni10,11, and Dorigo12. The principle of these methods is based on the way ants search for food and find their way back to the nest. Initially, ants explore the area surrounding their nest in a random manner. As soon as an ant finds a source of food it evaluates quantity and quality of the food and carries some of this food to the nest. During the return trip, the ant leaves a chemical pheromone trail on the ground. The role of this pheromone trail is to guide other ants toward the source of food, and the quantity of pheromone left by an ant depends on the amount of food found. After a while, the path to the food source will be indicated by a strong pheromone trail and the more the ants which reach the source of food, the stronger the pheromone trail left. Since sources that are close to the nest are visited more frequently than those that are far away, pheromone trails leading to the nearest sources grow more rapidly. These pheromone trails are exploited by ants as a means to find their way from nest to food source and back. The transposition of real ants food searching behaviour into an algorithmic framework for solving combinatorial optimisation problems is done by making an analogy between 1) the real ants’ search area and the set of feasible solutions to the combinatorial problem, 2) the amount of food in a source and the objective function, and 3) the pheromone trail and an adaptive memory.
D. GRAPH COLORING PROBLEM (GCP)
Available Online at www.ijpret.com 27 adjacent node with a certain probability pn (otherwise it moves to any other adjacent node randomly chosen), and assigns the best possible colour with a probability pc (otherwise any colour is assigned at random). The probabilistic nature of the algorithm allows the ants to escape from local minima and obtain bounds close to the absolute minimum. This process, which is carried out simultaneously by the set of ants, is repeated until the optimal solution is found or the algorithmconverges. The number of ants that move along the graph is an adjustable parameter and increases with the order of the graph
.
E. JOB SCHEDULING PROBLEM (JSP)
In the classical Job Shop Scheduling Problem, a finite number of jobs are to be processed by a finite number of machines. Each job consists of a predetermined sequence of operations, which will be processed without interruptions by a period of time in each machine. The operations that correspond to the same job will be processed according to their technological sequence and none of them will be able to begin its processing before the precedent operation has finished. A feasible schedule is an assignment of operations in time on a machine without violation of the job shop constraints. A makespan is defined as the maximum completion time of all jobs. The objective of JSSP is to find a schedule that minimizes the makespan.
Available Online at www.ijpret.com 28 According to the flowchart it first inputs the details of the no of jobs and the machines available and then these jobs are initialized to the individual machines. After this the processing of the job starts. If the job is completed it terminates otherwise it is updated and it continues till its processing is completely done.
The ants depose the chemical pheromone when they move in their environment; they are also able to detect and to follow pheromone trails. In our case, the pheromone trail describes how the ant systems build the solution of the JSP problem. The probability of choosing a branch at a certain time depends on the total amount of pheromone on the branch, which in turn is proportional to the number of ants that used the branch until that time. The probability that an ant will assign an operation Oi; j of job Jj to an available machine Mk. Each of the ants builds a solution using a combination of the information provided by the pheromone trail and by the heuristic function. Formally, the probability of
To allow the ants to share information about good solutions, the updating of the pheromone trail
must be established
Available Online at www.ijpret.com 29 CONCLUSION
In this paper we have introduced the ant colony optimization (ACO) meta-heuristic and we
have given an overview of ACO algorithms, ACO is a novel and very promising research.
It is a field situated at the crossing between artificial life and operations research.
It is a recently proposed metaheuristic approach for solving hard combinatorial optimization
problems.
Artificial ants implement a randomized construction heuristic which makes probabilistic
decisions.
The accumulated search experience is taken into account by the adaptation of the
pheromone trail.
ACO Shows great performance with the “ill-structured” problems like network routing.
In ACO Local search is extremely important to obtain good results.
ACO is the most adapted algorithm for adaptive problems with number of locations.
In conclusion, we hope this paper has achieved its goal: To convince the reader that ACO,
and more generally the stigmergetic model of communication, are worth further research.
REFERENCES
1. Ant Colony Optimization ppt,by Ahmad Elshamli, Daniel Asmar, Fadi Elmasri.
2. Ant Colony Optimization ppt ,by TheresaMeggie, Barker von Haartman,IE 516 Spring 2005.
3. Marco Dorigo, Vittorio Maniezzo, Alberto Colorni Dipartimento di Elettronica e
Informazione, Politecnico di Milano Piazza Leonardo da Vinci 32, 20133 Milano, Italy“The Ant System:Optimization by a colony of cooperating agents” 1991.
4. Ant Colony Optimization(ACO):Applications to Scheduling,Franco Villongco IEOR
4405,4/28/09
5. Ant Colony Optimization Algorithm Nada M. A. Al Salami [email protected]
Available Online at www.ijpret.com 30
7. Ant Colony Optimization,Nuno Abreu, Muhammad Ajmal, Zafeiris Kokkinogenis, Behdad
Bozorg FEUP-DEEC 2011-01-17
8. Ant colony optimization: Introduction and recent trends,Christian Blum 1,ALBCOM, LSI,
Universitat Politècnica de Catalunya, Jordi Girona 1-3, Campus Nord, 08034 Barcelona, Spain,Accepted 11 October 2005 Communicated by L. Perlovsky.
9. Dipl. Inf. Gunnar Völkel Theoretische Informatik Universität Ulm 10.06.2010
10.Classification With Ant Colony Optimization, David Martens, Manu De Backer, Raf Haesen,
Student Member, IEEE, Jan Vanthienen, Monique Snoeck, and Bart Baesens.
11.Ant Colony Optimisation for vehicle routing problems:from theory to applications A.E.
Rizzoli1, F. Oliverio2, R. Montemanni1, L.M. Gambardella1,1Istituto Dalle Molle di Studi sull’Intelligenza Artificiale (IDSIA)Galleria 2, CH-6928 Manno, Switzerland{andrea, roberto,
luca}@idsia.ch 2AntOptima, via Fusoni 4, CH-6900 Lugano, Switzerland
12.Ant Algorithms for Discrete Optimization∗Marco Dorigo and Gianni Di Caro IRIDIA,
Universit´e Libre de Bruxelles Brussels, Belgium{mdorigo,gdicaro}@ulb.ac.be Luca M. Gambardella IDSIA ,Lugano, [email protected]