Figure1. One-soliton solution of the KdV equation
Nonlinear Evolution Equations for Second-order
Spectral Problem
Wei Liu
Department of Mathematics and Physics, ShiJiaZhuang TieDao University, ShiJiaZhuang, China Email: [email protected]
Shujuan Yuan
Qinggong College, Hebei United University, TangShan, China Email: [email protected]
Shuhong Wang
College of Mathematics, Inner Mongolia University for Nationalities, TongLiao, China Email: [email protected]
Abstract—Soliton equations are infinite-dimensional
integrable systems described by nonlinear evolution equations. As one of the soliton equations, long wave equation takes on profound significance of theory and reality. By using the method of nonlinearization, the relation between long wave equation and second-order eigenvalue problem is generated. Based on the nonlinearized Lax pairs, Euler-Lagrange function and Legendre transformations, a reasonable Jacobi-Ostrogradsky coordinate system is obtained. Moreover, by means of the Bargmann constrained condition between the potential function and the eigenfunction, the Lax pairs is equivalent to matrix spectral problem. Furthermore, the involutive representations of the solutions for long wave equation are generated.
Index Terms—spectral problem, Hamilton canonical system,
Bargmann constraint, integrable system, involutive solution
I. INTRODUCTION
In 1895, Korteweg and de Vries [1-2] derived a nonlinear evolution equation as follows:
2 2
2
3 1 2 1
( )
2 2 3 3
g h
η η αη σ η
τ ξ ξ
∂ ∂ ∂
= + +
∂ ∂ ∂
3 1 3
Th h
g
σ
ρ
= −
By making the transformation
1 2
g t
hστ
= ,x= −σ ξ1 2 , 1 1
2 3
u= η+ α
the famous KdV equation
6 0
t x xxx
u + uu +u =
is obtained. It aroused an increasing interest among scientific researchers in the field of mathematics and physics, so more and more scientists have been interested in searching various methods to obtain solutions of some partial differential equation. Many effective methods have been proposed, for example, Hirota method, the inverse scattering, Darboux transformation, Painlevé
expansion, Bäcklund transformation, algebraic method and so on [1-7]. Using the inverse scattering method, we could obtain the N-soliton solution of KdV equation (see Fig. 1 and Fig. 2).
In our paper, by nonlinearization [8-15] of spectral problems, we considered the spectral
2
( ) x
Lϕ= ∂ + ∂ +q pϕ λϕ=
Figure2. Two-soliton solution of the KdV equation
II. LAX PAIRS AND EVOLUTION EQUATIONS Let us take the 2nd-order problem
Lϕ= ∂ + ∂ +( 2 q p)ϕ λϕ= x (1) where q=q x t( , )∈R p, = p x t( , )∈R , q p, ≠const are potential functions, λ is a complex eigenparameter,
x
∂ = ∂ ∂ ,∂∂ = ∂ ∂ =−1 −1 1.
Suppose Ω is the basic interval of (1), for the sake of simplicity, we assume that if the potentials q p, ,ϕ and all their derivatives with respect to x tend to zero, thenΩ = −∞ +∞( , ); If they are all periodic T functions, then Ω =[0, 2 ]T .
Definition 2.1 Assume that our linear space is equipped with a L2 scalar product
2( ) ( , )⋅ ⋅L Ω :
2
* ( )
( , )ϕ h L Ω ϕh dx Ω
=
∫
< ∞ symbol * denotes the complex conjugate.Definition 2.2 Operator
A
is an adjoint operator of A, if2( ) 2( )
(Aϕ, )h L Ω =( ,ϕ Ah)L Ω . Using definition 2.2, we get
Lψ = ∂ − ∂ +( 2 q p)ψ = −λ ψ* x (2) In order to derive the evolution equation related to the spectral problem (1), we consider the stationary zero curvature equation
λωx+[ , ]ω L =λω ωx+ L−Lω (3) Take
1 1 1
0
[ ] j
j j x j
j
a b b
ω ∞ λ−
− − −
=
=
∑
− − + ∂and set
1 1
1 0 1
a G
b − −
−
⎛ ⎞ ⎛ ⎞ =⎜ ⎟ ⎜ ⎟= ⎝ ⎠
⎝ ⎠ (4) therefore, we obtain the recursive relation
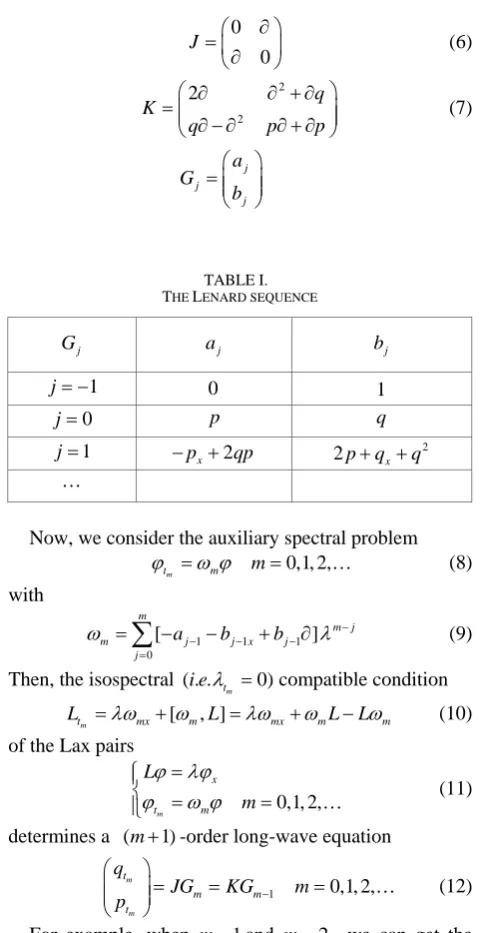
KGj−1=JGj,j=0,1, 2K, (5) where
0 0 J = ⎜⎛ ∂⎞⎟
∂
⎝ ⎠ (6)
2
2
2 q
K
q p p
⎛ ∂ ∂ + ∂ ⎞
= ⎜⎜ ⎟⎟
∂ − ∂ ∂ + ∂
⎝ ⎠ (7) j
j j a G
b ⎛ ⎞ = ⎜ ⎟⎜ ⎟ ⎝ ⎠
Now, we consider the auxiliary spectral problem 0,1, 2,
m
t m m
ϕ =ω ϕ = K (8) with
1 1 1
0
[ ]
m
m j
m j j x j
j
a b b
ω λ −
− − −
=
=
∑
− − + ∂ (9) Then, the isospectral ( . . 0)m
t
i eλ = compatible condition
[ , ]
m
t mx m mx m m
L =λω + ω L =λω +ω L−Lω (10) of the Lax pairs
0,1, 2,
m
x
t m
L
m
ϕ λϕ
ϕ ω ϕ
= ⎧⎪
⎨ = =
⎪⎩ K (11) determines a (m+1)-order long-wave equation
1 0,1, 2,
m
m
t
m m
t q
JG KG m
p −
⎛ ⎞
= = =
⎜ ⎟ ⎜ ⎟
⎝ ⎠ K (12)
For example, when m=1and m=2, we can get the first and the second nonlinear systems, the results are shown in TableⅡ. When m=1, it is the long-wave equation. When m=2and q≡0, it is exactly the famous KdV equations.
In order to give the constraints between the potentials and the eigenfunctions, it is necessary to calculate the functional gradientwith respect to the potential functions.
Proposition 2.3: [11]
i) Ifλis an eigenvalue of (1), thenλ is real. TABLE II.
THE FIRST AND THE SECOND NONLINEAR SYSTEM
Evolution
equation m=1 m=2and q≡0
m
t
q 2px+qxx+2qqx 0
m
t
p −pxx+2(qp)x
2
2 3( )
t xxx x
p = p + p
TABLE I. THE LENARD SEQUENCE
j
G aj bj
1
j= − 0 1
0
j= p q
1
j= −px+2qp 2
ii) If ϕ is an eigenfunction of (1) andψ is an eigenfunction of (2), thenϕ and ψ can be taken real functions.
iii) Ifϕ is an eigenfunction corresponding to the eigenvalue λ of (1) and ψ is an eigenfunction corresponding to the eigenvalueλof (2), then
1
( x ) x
q
dx
p
δλ
ϕψ δ
λ ϕ ψ
δλ ϕψ
δ
− Ω
⎛ ⎞
⎜ ⎟ ⎛− ⎞
⎜ ⎟
∇ = = ⎜ ⎟
⎜ ⎟ ⎝ ⎠
⎜ ⎟ ⎝ ⎠
∫
and
K∇ =λ λJ∇λ (13)
Proof: In fact, from (1) and (2), we have
* * ( )
x dx L dx
λ ϕ ψ ϕ ψ
Ω = Ω
∫
∫
* (L ) dx
ϕ ψ∗
Ω =
∫
* (L ) dx
ϕ ψ∗ ∗ Ω =
∫
*
xdx
λ ϕψ
Ω = −
∫
*
x dx
λ ϕ ψ
Ω =
∫
so*
λ λ=
If ϕ is a complex eigenfunction of (1) onλ , and a ib
ϕ= + ,a b, are real functions, from Lϕ λϕ= xandλ is real, then
x x
La a
Lb b
λ λ
= ⎧ ⎨ = ⎩
soa b, are eigenfunction of (1) onλ, ϕ can be taken real function. Similarly, ψ can be taken real function.
Let
0
( , , )
d
h h q q p p
d ε
λ εδλ εδ εδ
ε =
= + + + ,
by
x Lϕ λϕ= (Lϕ) =(λϕx)
x x
Lϕ+Lϕ =λ ϕ +λϕ and
(Lϕ ψ) dx ϕ ψ(L )dx
Ω = Ω
∫
∫
( x)dx
ϕ λψ
Ω =
∫
−x dx
λϕ ψ
Ω =
∫
sox dx L dx
λ ϕ ψ ϕψ
Ω = Ω
∫
∫
((δ ϕq )x δ ϕ ψp ) dx Ω
=
∫
+( δ ϕψq x δ ϕψp )dx Ω
=
∫
− +then
q
p
δλ δ λ
δλ δ
⎛ ⎞ ⎜ ⎟ ⎜ ⎟ ∇ =
⎜ ⎟ ⎜ ⎟ ⎝ ⎠
1
( ϕ ψx dx) ϕψx
ϕψ
− Ω
−
⎛ ⎞
= ⎜ ⎟
⎝ ⎠
∫
by (6) and (7), (13) holds. III. BARGMANN SYSTEMS AND THE HAMILTON
CANONICAL FORMS
We suppose λ1<λ2 <K<λN are the eigenvalues of the eigenvalue problem (1) and (2), ϕ ψj, j are the eigenfunction forλj( j=1, 2,L,N). Let
1 2
( , , N)
diag λ λ λ
Λ = L ,
1 2
( , , , )T N
ϕ ϕ ϕ
Φ = K ,
1 2
( , , , )T
N
ψ ψ ψ
Ψ = K
Now, we consider the Bargmann constraint [16-18] ,
, x q
p
=< Φ Ψ > ⎧
⎨ = − < Φ Ψ >
⎩ (14)
here
1 ,
N j j k
ϕ ψ
= < Φ Ψ >=
∑
namely
0
, ,
x p
G q
− < Φ Ψ >
⎛ ⎞
⎛ ⎞
=⎜ ⎟= ⎜ ⎟
< Φ Ψ >
⎝ ⎠ ⎝ ⎠
, ,
j x
j j
G = ⎜⎛⎜< −Λ Φ Ψ >⎞⎟⎟ < Λ Φ Ψ >
⎝ ⎠ j=0,1, 2L (15) so the eigenvalue problem (1) and (2) are equivalent to the systems
( , ) ,
, ,
xx x x x
xx x x x
Φ + < Φ Ψ > Φ − < Φ Ψ > Φ = ΛΦ ⎧
⎨Ψ − < Φ Ψ > Ψ − < Φ Ψ > Ψ = −ΛΨ
⎩ (16)
and (16) are called the Bargmann systems for the eigenvalue problem (1) and (2).
Let
Iˆ=
∫
ΩIdx (17) where the Lagrange function Iis defined as follows:1 1
, , , ,
2 2
x x x x
I=< Φ Ψ > + < Φ Ψ >< Φ Ψ > + < ΛΦ Ψ >
1 1
, , ,
2 x 2 x
− < ΛΦ Ψ > − < Φ Ψ >< Φ Ψ >
Proposition 3.1: The Bargmann systems (16) of the eigenvalue problem (1) and (2) are equivalent to the Euler-Lagrange equation systems:
ˆ 0 ˆ
0 I
I
δ δ δ δ
⎧ = ⎪⎪ Φ ⎨
⎪ =
⎪ Ψ ⎩
(18)
Proof: By (17), we have
ˆ
, ,
jxx x j jx jx
j I
δ ψ ψ ψ λψ
δϕ = − < Φ Ψ > − < Φ Ψ > +
, x ψj , ψjx λψjx
, x ψj , ψjx λψjx
− < Φ Ψ > − < Φ Ψ > +
0
= similarly,
ˆ
( , ) ,
jxx j x x jx jx
j I
δ ϕ ϕ ϕ λϕ
δψ = − − < Φ Ψ > + < Φ Ψ > +
( , ϕj)x , x ϕjx λϕjx
= < Φ Ψ > − < Φ Ψ > − ( , ϕj)x , x ϕjx λϕjx
− < Φ Ψ > + < Φ Ψ > +
0
= Now, the Poisson bracket [19] of the real-valued functions F and H in the symplectic [20] space (
2
4
1
, N
j j
j
w dz dy R
=
=
∑
∧ ) is defined as follows:2
1 1
{ , } ( )
N
j k jk jk jk jk
F H F H
F H
y z z y
= =
∂ ∂ ∂ ∂
= −
∂ ∂ ∂ ∂
∑∑
21
( yj, zj zj, yj )
j
F H F H
=
=
∑
< > − < >Based on the the Euler-Lagrange equation (18), the Jacobi-Ostrogradsky coordinates can be found, and the Bargmann systems (16) can be written in the Hamilton canonical equation systems [21].
Let
2
1 2
1
, , jx, j
j
u u g u v I
=
= Φ = Ψ =
∑
< > −Our aim is to find that the coordinates { ,v v1 2}and g
satisfy the following Hamilton canonical equations:
{ , }
1, 2 { , }
jx j
j
jx j
j g
u u g
v
j g
v v g
u ∂
⎧ = =
⎪ ∂
⎪ =
⎨ ∂
⎪ = = −
⎪ ∂
⎩
By directly computing, we have
1
2
1
2
1 1
2 2
1 1
2 2
1 1
, ,
2 2
1 1
,
2 2
1 1
, ,
2 2
1 1
,
2 2
x
x
x x x
x x
x x x
x x
v q
v q
v
v
⎧ = Ψ − Ψ + ΛΨ ⎪
⎪
⎪ = Φ + Φ − ΛΦ ⎪
⎪
⎪ = < Φ Ψ > Ψ + < Φ Ψ > Ψ
⎪ ⎨
⎪ − < Φ Ψ > Ψ − ΛΨ
⎪ ⎪
⎪ = < Φ Ψ > Φ − < Φ Ψ > Φ
⎪ ⎪
− < Φ Ψ > Φ + ΛΦ ⎪
⎩
So, if we take the Jacobi-Ostrogradsky coordinates as follows:
1
2
1
2
1 1
2 2
1 1
2 2
x
x u u
v q
v q
= Φ ⎧ ⎪ = Ψ ⎪ ⎪
⎨ = Ψ − Ψ + ΛΨ
⎪ ⎪
= Φ + Φ − ΛΦ
⎪ ⎩
(19)
Then the Bargmann systems (16) are equivalent to the following Hamilton canonical systems:
1, 2 jx
j
jx j g u
v
j g v
u
∂
⎧ =
⎪ ∂
⎪ =
⎨ ∂
⎪ = −
⎪ ∂
⎩
where
1 2 1 2 2 2 2 2
1 1
, , , ,
2 2
g=<v v > + <u u ><u v > − <λu v >
3
1 2 1 1 1 2 1 1
1 1 1
, , , ,
2 u u u v 4 u u 2 λu v
− < >< > − < > + < >
2
1 2 1 2 1 2
1 1
, , ,
2 u u λu u 4 λ u u
+ < >< > − < >
By (19), the Jacobi-Ostrogradsky coordinates can be written in the following form:
1
2
2
1
,
1 1
2 2
1 1
2 2
x
x y
y q
z
z q
= Φ ⎧ ⎪
⎪ = Φ + Φ − ΛΦ
⎪ ⎨ = Ψ ⎪ ⎪
= −Ψ + Ψ − ΛΨ
⎪ ⎩
(20)
then, we have:
Theorem 3.2: The Bargmann systems (16) of the eigenvalue problem (1) and (2) are equivalent to the following Hamilton canonical systems:
1, 2 jx
j
jx j h y
z
j h z
y
∂
⎧ =
⎪ ∂
⎪ =
⎨ ∂
⎪ = −
⎪ ∂
⎩
where
2 1 1 2 2 2 2 2
1 1
, , , ,
2 2
h=< y z > − <y z ><y z > + < Λy z >
3
1 2 1 1 1 2 1 1
1 1 1
, , , ,
2 y z y z 4 y z 2 y z
− < >< > + < > + < Λ >
2
1 2 1 2 1 2
1 1
, , ,
2 y z y z 4 y z
− < Λ >< > + < Λ >
and h= −g.
IV. NONLINEARIZATION OF THE LAX PAIRS
Form (20) and Theorem 3.2, the Bargmann systems (16) have the equivalence form
x T x
Y MY
Z M Z
= ⎧⎪ ⎨
= − ⎪⎩
where
1
2
1 1
2 2
x y
Y
y q
Φ
⎛ ⎞
⎛ ⎞ ⎜ ⎟
=⎜ ⎟ ⎜= ⎟
Φ + Φ − ΛΦ
⎜ ⎟
⎝ ⎠ ⎝ ⎠
1
2
1 1
2 2
x
z q
Z z
⎛−Ψ + Ψ − ΛΨ⎞
⎛ ⎞ ⎜ ⎟
=⎜ ⎟ ⎜= ⎟
⎜ ⎟
11 21 22 M E M M M ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ where 11 1 1 2 2
M = − qE+ Λ
2 2
21
1 1 1 1
4 2 x 2 4
M = q E−pE− q E− Λ + Λq
22
1 1
2 2
M = − qE+ Λ
(1,1, ,1)
N N
E=E × =diag K
Proposition 4.1: The Lax pairs (11) for the(m+1) -order evolution equation (12) is equivalent to
, ;
, , 0,1, 2 ,
m m
T
x x
T
t m t m
Y MY Z M Z
Y W Y Z W Z m
⎧ = = −
⎪ ⎨
= = − =
⎪⎩ K (21)
where
0
m
m m m j
m
j m m
A B W C D − = ⎛ ⎞ = ⎜ ⎟Λ ⎝ ⎠
∑
1 1 1 1
1 1
2 2
m j j j x j
A = −a− − qb− −b− + Λb−
1
m j
B =b−
2
1 1 1 1 1
1 1 1 1
2 2 4 2
m j xx x j j j j
C = − b− − q b− −pb− + q b− − Λqb−
2 1 1 4 bj−
+ Λ
1 1 1
1 1
2 2
m j j j
D = −a − − qb− + Λb−
By (14) and (20), we have the Bargmann constraint
1 2
2
1 1 1 2 1 2
,
1 1
, , ,
2 2
q y z
p y z y z y z
=< > ⎧
⎪ ⎨
=< > − < > + < Λ >
⎪⎩
(22)
11
1 2
, 0,1, 2, , , j j j j a G G j
b y z
⎛ ⎞ ⎛ ⎞
=⎜ ⎟ ⎜⎜ ⎟= ⎟ = < Λ >
⎝ ⎠
⎝ ⎠ K
(23) where
1 11 1 1 1 2 1 2 1 2
1 1
, , , ,
2 2
j j j
G =< Λ y z > − <y z >< Λ y z > + < Λ+ y z >
Substituting the Bargmann constraint (22) and (23) into (21), the Lax pairs (24) for the (m+1)-order evolution equation (12) is equivalent to the following forms:
, 0,1, 2, m m T x x T
t m t m
Y MY Z M Z
Y W Y Z W Z m
⎧ = = −
⎪
⎨ = = − =
⎪⎩ K (24) where 11 21 22 M E M M M ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ m m m m m A B W C D ⎛ ⎞ = ⎜⎜ ⎟⎟ ⎝ ⎠
11 1 2
1 1
,
2 2
M = − <y z > + Λ
2 2
21 1 2 1 1 2 2
1 3 1 1
, , ,
4 4 2 2
M = Λ + <y z > − <y z > − <y z >
1 2 1 2
1 1
, ,
2 y z 2 y z
− < Λ > − Λ < >
22 1 2
1 1
,
2 2
M = − <y z > + Λ
1 1
2 2 1 2
1
1 1
[ , ] ,
2 2
m
j m j m m
m j
A −y z − + y z
=
=
∑
− < Λ > Λ + Λ − < Λ >1 1 2 1
[ , ]
m
j m j m
m j
B − y z −
=
=
∑
< Λ > Λ + Λ1
2 1 1 1 2 2
1
1
[ , ] ( , ,
2
m
j m j m
m j
C −y z − y z y z
=
=
∑
< Λ > Λ − < > + < > Λ)1 2
1 2 1 2
1 1 1
, ,
4 4 4
m m m
y z + y z +
− < > Λ − < Λ > Λ + Λ
1
1 2 1 2
1 1
, ,
4 4
m m
y z y z
+
− < Λ > − < Λ > Λ
1 2 1 2
1
, ,
2
m
y z y z
+ < >< Λ > 2
1 2 1 , 4 m y z
+ < > Λ
1 1
1 1 1 2
1
1 1
[ , ] ,
2 2
m
j m j m m
m j
D − y z − + y z
=
=
∑
− < Λ > Λ + Λ − < Λ >Theorem 4.2: On the Bargmann constraint (22), the nonlinearized Lax pairs (24) for the (m+1)-order long wave equation (12) can be written as the following Hamilton systems [11-12]:
, ;
, , 0,1, 2, ,
m m x x m m t t h h Y Z Z Y h h
Y Z m
Z Y ∂ ∂ ⎧ = = − ⎪⎪ ∂ ∂ ⎨ ∂ ∂ ⎪ = = − = ⎪ ∂ ∂ ⎩ K (25) where
1 1 2
1 1 2 2 1 2
1 1 1
, , ,
2 2 4
m m m
m
h = < Λ + y z > + < Λ +y z > + < Λ + y z >
2
1 2 1 2 1 2 1 2
1 1
, , , ,
4 4
m m
y z y z y z y z
+ < > < Λ > − < Λ >< Λ >
1 1 2 1 2
1
, ,
4 m
y z y z
+
− < Λ >< >+ < Λmy z2, 1>
1 2 1 1 2 2
1
, ( , , )
2 m
y z y z y z
− < Λ > < > + < >
1
1 2 2 2
1
1 1 1 2 1
, ,
, ,
j m j
m
j m j
j
y z y z
y z y z
− −
− −
=
< Λ > < Λ >
+
< Λ > < Λ >
∑
andh0 =h.
Proof: 2 1 2 1 1 1
1 1
,
2 2
h
y y z y y
z
∂
= − < > + Λ
∂
1x y
=
2 1 2 2 2 2 1
2
1 1 1
, ,
2 2 2
h
y y z y y z y
z
∂ = Λ − < > − < >
2 2
1 1 1 1 2 1 1
1 3 1
, ,
2 y z y 4 y z y 4 y
− < > + < > + Λ
1 2 1 1 2 1
1 1
, ,
2 y z y 2 y z y
− < Λ > − < > Λ
2x y
=
1
1 1 2 1 2
1
1 1
,
2 2
m m m
m h
y y z y y
z
+
∂ = Λ − < Λ > + Λ
∂
1
1 2 2 2 2 1
1
[ , , ]
m
j m j m j
j
y z y y z y
− − −
=
+
∑
< Λ > − < Λ > Λ1tm
y =
1 2
2 1 1 1 1
2
1 1 1
,
2 4 2
m m m
m h
y y y z y
z
+ +
∂
= Λ + Λ − < > Λ
∂
1 2 2 2 2 1
1 1
, ,
2 2
m m
y z y y z y
− < Λ > − < > Λ
2
1 2 1 1 2 1 2 1
1 1
, , ,
4 2
m m
y z y y z y z y
+ < > Λ + < >< Λ >
1 2 1 1 2 1
1 1
, ,
4 4
m m
y z y y z y
− < Λ > Λ − < Λ > Λ
1 1
1 2 1 1 2 1
1 1
, ,
4 4
m m
y z y y z y
+ +
− < Λ > − < > Λ
1 1
2 1 1 1 1 2
1
[ , , ]
m
j j m j
j
y z y y z y
− − −
=
+
∑
< Λ > − < Λ > Λ2tm
y = so x h Y Z ∂ =
∂ , m
m t h Y Z ∂ = ∂
Similarly, we have
2
1 2 2 2 1 2 2
1
1 1 3
, ,
2 2 4
h
z y z z y z z
y
∂
= Λ − < > + < >
∂
2
2 1 2 1 1 1 2
1 1 1
, ,
4 z 2 y z z 2 y z z
+ Λ − < > − < >
1 2 2 1 2 2
1 1
, ,
2 y z z 2 y z z
− < Λ > − < > Λ
1x z
= −
1 1 2 2 2
2
1 1
,
2 2
h
z y z z z
y
∂ = − < > + Λ
∂
2x z
= −
1
1 1 2 1 1 1 2
1
1 1 1
, ,
2 2 2
m m m
m h
z y z z y z z
y
+
∂
= Λ − < Λ > − < > Λ
∂
2
1 2 2 1 2 1 2 2
1 1
, , ,
4 2
m m
y z z y z y z z
+ < > Λ + < >< Λ >
1 1
1 2 2 1 2 2
1 1
, ,
4 4
m m
y z z y z z
+ +
− < Λ > − < > Λ
1 2 2 1 2 2
1 1
, ,
4 4
m m
y z z y z z
− < Λ > Λ − < Λ > Λ
2
2 2 2 2
1 1
,
2 4
m m
y z z + z
− < > Λ + Λ
1 1
2 1 2 2 2 1
1
[ , , ]
m
j j m j
j
y z z y z z
− − −
=
+
∑
< Λ > − < Λ > Λ1tm
z = −
1
2 1 1 2 2
2
1 1
,
2 2
m m m
m h
z z y z z
y
+
∂
= Λ + Λ − < Λ >
∂
1 1
1 2 1 1 1 2
1
[ , , ]
m
j j m j
j
y z z y z z
− − −
=
+
∑
< Λ > − < Λ > Λ2tm
z = − so x h Z Y ∂ = −
∂ , m
m t h Z Y ∂ = − ∂ V.LIOUVILLE COMPLETELY INTEGRABLE SYSTEMS Now we discuss the completely integrability for the Bargmann systems (25).
Let
(1)
1 1 2 2
(2)
1 2 1 1 2 2 2 1
2
1 2 1 2 1 2 1 2
2 (1,2)
1 2 1 2 1 2
1 1 2 2 1 ( , , ) 2 1 1 , , 4 4 1 1 , 4 4
k k k k k k k
k k k k k
k k k k k
k k k k k k
E y z y z
E y z y z y z y z
y z y z y z y z
y z y z y z
λ λ λ λ ⎧ = + ⎪ ⎪
⎪ = − < > + < > +
⎪ ⎨
⎪ − < > + < >
⎪ ⎪
⎪ + − < Λ > −Γ
⎩
where
1 1 1 1
(1,2)
1, 2 2 2 2
1 N
k l k l
k
l l k k l k l k l
y y z z
y y z z
λ λ = ≠ Γ = −
∑
Proposition 5.1:i) {Ej(1),Ek(1)}=0,{E(1)j ,Ek(2)}=0,{E(2)j ,Ek(2)}=0 , 1, 2,
j k N
∀ = K (26) ii) {dE( )jl ,j=1, 2,KN l; =1, 2} are the linear independ- ence.
ⅲ) (1) (2) 1
1 0
1
( )
N
m
j j m
j j m
Hμ μ λ E E μ h
∞ − −
= =
= + =
−
∑
∑
(27)(1) (2)
1
( )
N m
m j j j
j
h λ E E
=
=
∑
+ m=0,1, 2,K (28)Theorem 5.2: The Bargmann [8] systems (25) are the completely integrable systems in the Liouville sense. i.e.
( )
{ , l } 0, 1, 2; 1, 2, , j
h E = l= j= K N (29)
( )
{h Em, jl }=0, l=1, 2;j=1, 2,K,N (30) {h hm, n}=0, m n, =0,1, 2,K (31) { ,h hm}=0, m=0,1, 2,K (32)
Proof: By (26) and (28), we have {h hm, n}=0, m n, =0,1, 2,K from (27), then
{Hλ,Hμ}=0 using h=h0, we have
( )
{ ,h Ejl}=0, l=1, 2;j=1, 2,K,N
Figure3. Interaction of two solitary waves at different times
Figure3. Interaction of two solitary waves at different times
Figure3. Interaction of two solitary waves at different times According to the above Theorem, the Hamiltonian
phase flows n n
t h
g and m m
t h
g are commutable. Now, we arbitrarily choose an initial value
( (0, 0), (0, 0))yi zi T i=1, 2, let
( , ) (0, 0) (0, 0)
( , ) (0, 0) (0, 0)
m n n m
m n n m
i m n t t i t t i
h h h h
i m n i i
y t t y y
g g g g
z t t z z
⎛ ⎞ ⎛ ⎞ ⎛ ⎞
= =
⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠
From (8), (9) and Theorem 4.2, the following theorem holds.
Theorem 5.3: Suppose ( ,y y z z1 2, ,1 2) is an involutive solution of the Hamiltonian [11] canonical equation systems (25), then
1 2
2
1 1 1 2 1 2
,
1 1
, , ,
2 2
q y z
p y z y z y z
=< >
⎧ ⎪ ⎨
=< > − < > + < Λ >
⎪⎩
satisfies the (m+1)-order long-wave equation (12).
Remark: By Theorem 5.2, soliton waves have the following properties: when two of them interact, the larger soliton has been shifted to the right of where it would have been no interaction, and the smaller shifted to the left by the same time (see Fig. 3) [22-24].
Especially, if ( ,y y z z1 2, ,1 2) satisfies
1
1
1 1
2 2
1 1
2 2
1 1
1
2 2
1 1
1
2 2
x T x
t T t
y y
M
y y
z z
M
z z
y y
W
y y
z z
W
z z
⎧⎛ ⎞ ⎛ ⎞
=
⎪⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
⎪
⎪⎛ ⎞ ⎛ ⎞
⎪⎜ ⎟ = − ⎜ ⎟
⎪⎝ ⎠ ⎝ ⎠
⎪
⎨⎛ ⎞ ⎛ ⎞
⎪⎜ ⎟ = ⎜ ⎟
⎪⎝ ⎠ ⎝ ⎠
⎪
⎪⎛ ⎞ ⎛ ⎞
= −
⎪⎜ ⎟ ⎜ ⎟
⎪⎝ ⎠ ⎝ ⎠
⎩
where
1 2
21 1 2
1 1
,
2 2
1 1
,
2 2
y z E
M
M y z
⎛ Λ − < > ⎞
⎜ ⎟
= ⎜ ⎟
⎜ Λ − < >⎟
⎜ ⎟
⎝ ⎠
2 2
21 1 2 1 1 2 2
1 3 1 1
, , ,
4 4 2 2
M = Λ + <y z > − <y z > − <y z >
1 1 1
1 1
A B
W
C D
⎛ ⎞
= ⎜⎜ ⎟⎟
⎝ ⎠
2
1 1 2 2 2
1 1
, ,
2 2
A = Λ − < Λy z > − <y z >
1 1, 2
B = Λ+ < y z >
1 2 1 1 1 2 2
1
, ( , ,
2
C =<y z > − <y z > + <y z > Λ)
2 3
1 2 1 2
1 1 1
, ,
4 y z 4 y z 4
− < > Λ − < Λ > Λ + Λ
2
1 2 1 2
1 1
, ,
4 y z 4 y z
− < Λ > − < Λ > Λ
1 2 1 2
1
, ,
2 y z y z
+ < >< Λ > 2
1 2
1 ,
4 y z
+ < > Λ
2
1 1 2 1 1
1 1
, ,
2 2
D = Λ − < Λy z > − <y z >
1 2
2
1 1 1 2 1 2
,
1 1
, , ,
2 2
q y z
p y z y z y z
=< >
⎧ ⎪ ⎨
=< > − < > + < Λ >
⎪⎩
satisfies long-wave equation
1
1
2 2
2( )
t x xx x
t xx x
q p q qq
p p qp
⎛ ⎞ ⎛ + + ⎞
=
⎜ ⎟ ⎜ ⎟
⎜ ⎟ ⎝− + ⎠
⎝ ⎠
ACKNOWLEDGMENT
The author is grateful to anonymous referees for their valuable suggestions. This work is supported in part by a grant from the Youth Science Foundation of Hebei Province (Project No. A2011210017).
REFERENCES
[1] M. J. Ablowitz and P. A. Clarkson, Solitons, Evolution
Equations and Inverse Scattering, Cambridge University Press, 1991.
[2] D. Y. Chen, Soliton Theory, Science Press, 2006.
[3] V. I. Arnold, Mathematical Methods of Classical
Mechanics, 2nd ed., Spring-Verlag, New York Berlin Heidelberg, 1999.
[4] C. W. Cao, “A classical integrable system and involutive
representation of solutions of the KdV equation,” Acta
Math. Sinia, 1991, pp. 436–440.
[5] D. S. Wang, “Integrability of a coupled KdV system:
Painleve property, Lax pair and Bäcklund transformation,”
Appl. Math. and Comp., vol. 216, 2010, pp. 1349–1354.
[6] Y. H. Cao and D. S. Wang, “Prolongation structures of a
generalized coupled Korteweg-de Vries equation and
Miura transformation,” Commun. in Nonl. Sci. and Num.
Simul., vol.15, 2010, pp.2344–2349.
[7] D. S. Wang, “Complete integrability and the Miura
transformation of a coupled KdV equation,” Appl. Math.
Lett., vol. 23, 2010, pp. 65–669.
[8] X. Zeng and D. S. Wang, “A generalized extended rational
expansion method and its application to (1+1)-dimensional
dispersive long wave equation,” Appl. Math. Comp., vol.
212, 2009, pp. 296–304.
[9] Y. T. Wu and X. G. Geng, “A finite-dimensional integrable
system associated with the three-wave interaction
equations,” J. Math. Phys., vol. 40, 1999, pp. 3409–3430.
[10]C. W. Cao, Y. T. Wu, and X. G. Geng, “Relation between
the Kadometsev-Petviashvili equation and the confocal
involution system,” J. Math. Phys., vol. 40, 1999, pp.
3948–3970.
[11]Z. Q. Gu, “The Neumann system for 3rd-order eigenvalue
problems related to the Boussinesq equation. IL Nuovo
Cimento, vol. 117B(6),” 2002, pp. 615–632.
[12]W. X. Ma and R. G. Zhou, “Binary nonlinearization of
spectral problems of the perturbation AKNS systems,”
Chaos Solitons &Fractals 13, 2002, pp. 1451–1463.
[13] X. G. Geng and D. L. Du, “Two hierarchies of new
nonlinear evolution equations associated with 3 3× matrix
spectral problems,” Chaos Solitons &Fractals 29, 2006, pp.
1165–1172.
[14]X. G. Geng and H. H. Dai, “A hierarchy of new nonlinear
differential-difference equations”. Journal of the Physical
Socoety of Japan 75, vol. 1, 2006.
[15]J. S. He, J. Yu, Y. Cheng, and R. G. Zhou, “Binary
Nonlinearization of the Super AKNS System,” Mod.
Phys. Lett. B, vol.22, 2008, pp. 275-288.
[16]Z. Q. Gu and J. X. Zhang, “A new constrained flow for
Boussinesq-Burgers’ hierarchy,” IL Nuovo Cimento, vol.
122B(8), 2007, pp. 871–884.
[17]W. Liu, S. J. Yuan, and Q. Wang, “The second-order
spectral problem with the speed energy and its completely
integrable system”, Journal of Shijiazhuang Railway
Institute, vol. 22(1), 2009.
[18]Z. Q. Gu, J. X. Zhang, and W. Liu, “Two new completely
integrable systems related to the KdV equation hierarchy,”
IL Nuovo Cimento, vol. 123B(5), 2008, pp. 605–622.
[19]O. J. Peter, Applications of Lie Groups to Differential
Equations, 2nd ed., Spring-Verlag, New York Berlin Heidelberg, 1999, pp. 13–53, 452–462.
[20]B. Q. Xia and R. G. Zhou, “Integrable deformations of
integrable symplectic maps,” Phys. Lett. A, vol.373, 2009,
pp.1121–1129.
[21]Y. Q. Yao, Y. H. Huang, Y. Wei, and Y. B. Zeng, “Some
new integrable systems constructed from the bi-Hamiltonian systems with pure differential bi-Hamiltonian
operators,” Applied Mathematics and Computation, vol.
218, 2011, pp. 583-591.
[22]Y. Keskin and G. Oturanc, “Numerical solution of
regularized long wave equation by reduced differential
transform method,” Applied Mathematical Sciences, vol. 4,
2010, pp. 1221-1231.
[23]J. X. Cai, “A multisymplectic explicit scheme for the
modified regularized long-wave equation,” Journal of
Computational and Applied Mathematics 234, 2010, pp. 899-905.
[24]J. X. Cai, “Multisymplectic numerical method for the
regularized long-wave equation,” Computer Physics
Communications 180, 2009, pp. 1821-1831.
Wei Liu was born in Shijiazhuang, Hebei/ January, 1981, Received M.S. degree in 2007 from School of Sciences, Hebei University of Technology, Tianjin, China. She mainly engaged in control and application of differential equations. Current research interests include integrable systems and computational geometry.
Shujuan Yuan was born in Tangshan, Hebei, September, 1980. Received M.S. degree in 2007 from School of Sciences, Hebei University of Technology, Tianjin, China. Current research interests include integrable systems and computional geometry. She is a lecturer in department of Qinggong College, Hebei United University.